JP2012185134A - 走路推定装置及びプログラム - Google Patents
走路推定装置及びプログラム Download PDFInfo
- Publication number
- JP2012185134A JP2012185134A JP2011050253A JP2011050253A JP2012185134A JP 2012185134 A JP2012185134 A JP 2012185134A JP 2011050253 A JP2011050253 A JP 2011050253A JP 2011050253 A JP2011050253 A JP 2011050253A JP 2012185134 A JP2012185134 A JP 2012185134A
- Authority
- JP
- Japan
- Prior art keywords
- lane
- estimation
- parameter
- runway
- road
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000003384 imaging method Methods 0.000 claims abstract description 33
- 238000000605 extraction Methods 0.000 claims abstract description 20
- 239000000284 extract Substances 0.000 claims abstract description 6
- 238000001514 detection method Methods 0.000 claims description 5
- 238000000034 method Methods 0.000 description 29
- 230000006870 function Effects 0.000 description 5
- 238000005192 partition Methods 0.000 description 5
- 230000007423 decrease Effects 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 238000006073 displacement reaction Methods 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 230000006399 behavior Effects 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
Images








Landscapes
- Length Measuring Devices By Optical Means (AREA)
- Traffic Control Systems (AREA)
Abstract
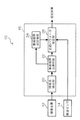
【解決手段】特徴点抽出部20により撮像装置12で撮像された撮像画像を取得して、撮像画像から特徴点を抽出し、車線境界点選択部22により、抽出された特徴点から車線を示す車線境界点を選択し、車線境界点記憶部24に一旦記憶する。走路パラメータ推定部26により、二時刻間でヨー角及び曲率が変化しないとの仮定の下で、二時刻間の横位置の変化を速度V及びヨー角を用いて表すことで、二時刻間の走路パラメータを関係付け、二時刻の各々で選択された車線境界点群と、走路パラメータにより定まる車線境界線との最適化により、走路パラメータを推定する。
【選択図】図1
Description
12 撮像装置
14 車速センサ
16、216 コンピュータ
20 特徴点抽出部
22 車線境界点選択部
22R 右車線境界点選択部
22L 左車線境界点選択部
24 車線境界点記憶部
24L 左車線境界点記憶部
24R 右車線境界点記憶部
26 走路パラメータ推定部
26L 左側走路パラメータ推定部
26R 右側走路パラメータ推定部
28 左右走路パラメータ推定部
30 最終推定部
Claims (6)
- 自車両周辺を撮像する該自車両に搭載された撮像手段と、
前記自車両の速度を検出する検出手段と、
前記撮像手段の撮像により得られた撮像画像から、車線を示す特徴点を抽出する抽出手段と、
前記抽出手段により抽出された特徴点に基づいて、前記自車両が走行する走路の形状を表す値、前記走路に対する前記撮像手段の俯角、ヨー角、及び横位置を含み、かつ前記撮像画像上での車線位置を定める走路パラメータを推定する際に、前記形状を表す値及び前記ヨー角が、異なる二時刻間で変化しないとの仮定の下で、前記二時刻間の前記横位置の変化量を前記検出手段により検出された速度及び前記ヨー角で表して、前記二時刻の各々で抽出された特徴点と前記走路パラメータにより定まる車線位置との最適化により、該走路パラメータを推定する二時刻推定手段と、
を含む走路推定装置。 - 前記抽出手段により抽出された一時刻における左右の車線を示す特徴点と、前記走路パラメータにより定まる車線位置との最適化により、前記走路パラメータを推定する一時刻推定手段と、
前記一時刻推定手段の推定結果、及び前記二時刻推定手段の推定結果の少なくとも一方を用いて最終的な走路パラメータを推定する最終推定手段と、
を含む請求項1記載の走路推定装置。 - 前記二時刻推定手段は、前記特徴点として、左の車線の特徴点及び右の車線の特徴点の各々を用いて、前記走路パラメータを推定し、
前記最終推定手段は、前記二時刻推定手段による左の車線の特徴点に基づく推定結果と右の車線の特徴点に基づく推定結果との差が所定範囲内であり、かつ前記二時刻推定手段による推定結果のいずれか一方と前記一時刻推定手段による推定結果との差が所定値以上の場合には、前記二時刻推定手段による推定結果の少なくとも一方を用いて、前記最終的な走路パラメータを推定する
請求項2記載の走路推定装置。 - 前記走路の形状を表す値を、前記走路の曲率、または前記走路の曲率及び曲率の変化率とした請求項1〜請求項3のいずれか1項記載の走路推定装置。
- コンピュータを、
自車両周辺を撮像する該自車両に搭載された撮像手段により得られた撮像画像、及び前記自車両の速度を検出する検出手段により検出された該自車両の速度を取得する取得手段、
前記取得手段により取得された撮像画像から、車線を示す特徴点を抽出する抽出手段、及び
前記抽出手段により抽出された特徴点に基づいて、前記自車両が走行する走路の形状を表す値、前記走路に対する前記撮像手段の俯角、ヨー角、及び横位置を含み、かつ前記撮像画像上での車線位置を定める走路パラメータを推定する際に、前記形状を表す値及び前記ヨー角が、異なる二時刻間で変化しないとの仮定の下で、前記二時刻間の前記横位置の変化量を前記取得手段により取得された速度及び前記ヨー角で表して、前記二時刻の各々で抽出された特徴点と前記走路パラメータにより定まる車線位置との最適推定により、該走路パラメータを推定する二時刻推定手段
として機能させるための走路推定プログラム。 - コンピュータを、請求項1〜請求項請求項4のいずれか1項記載の走路推定装置を構成する各手段として機能させるための走路推定プログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011050253A JP5760523B2 (ja) | 2011-03-08 | 2011-03-08 | 走路推定装置及びプログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011050253A JP5760523B2 (ja) | 2011-03-08 | 2011-03-08 | 走路推定装置及びプログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012185134A true JP2012185134A (ja) | 2012-09-27 |
| JP5760523B2 JP5760523B2 (ja) | 2015-08-12 |
Family
ID=47015330
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011050253A Expired - Fee Related JP5760523B2 (ja) | 2011-03-08 | 2011-03-08 | 走路推定装置及びプログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5760523B2 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20140012453A1 (en) * | 2012-07-09 | 2014-01-09 | Deere & Company | Navigation System and Method for Autonomous Mower |
| JP2016091468A (ja) * | 2014-11-10 | 2016-05-23 | 株式会社豊田中央研究所 | 目標軌跡算出装置及びプログラム |
| JP2020006845A (ja) * | 2018-07-10 | 2020-01-16 | 株式会社明電舎 | 線路曲率推定装置及び方法 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0620189A (ja) * | 1992-06-29 | 1994-01-28 | Nissan Motor Co Ltd | 道路形状計測装置 |
| JPH1139464A (ja) * | 1997-07-18 | 1999-02-12 | Nissan Motor Co Ltd | 車両用画像処理装置 |
| JP2002236912A (ja) * | 2001-02-13 | 2002-08-23 | Nissan Motor Co Ltd | 道路の仕切線認識装置 |
| JP2003065715A (ja) * | 2001-08-28 | 2003-03-05 | Nissan Motor Co Ltd | 道路白線認識装置 |
| JP2009037541A (ja) * | 2007-08-03 | 2009-02-19 | Nissan Motor Co Ltd | レーンマーカ認識装置及びその方法、並びに車線逸脱防止装置 |
| JP2009181310A (ja) * | 2008-01-30 | 2009-08-13 | Toyota Central R&D Labs Inc | 道路パラメータ推定装置 |
-
2011
- 2011-03-08 JP JP2011050253A patent/JP5760523B2/ja not_active Expired - Fee Related
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0620189A (ja) * | 1992-06-29 | 1994-01-28 | Nissan Motor Co Ltd | 道路形状計測装置 |
| JPH1139464A (ja) * | 1997-07-18 | 1999-02-12 | Nissan Motor Co Ltd | 車両用画像処理装置 |
| JP2002236912A (ja) * | 2001-02-13 | 2002-08-23 | Nissan Motor Co Ltd | 道路の仕切線認識装置 |
| JP2003065715A (ja) * | 2001-08-28 | 2003-03-05 | Nissan Motor Co Ltd | 道路白線認識装置 |
| JP2009037541A (ja) * | 2007-08-03 | 2009-02-19 | Nissan Motor Co Ltd | レーンマーカ認識装置及びその方法、並びに車線逸脱防止装置 |
| JP2009181310A (ja) * | 2008-01-30 | 2009-08-13 | Toyota Central R&D Labs Inc | 道路パラメータ推定装置 |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20140012453A1 (en) * | 2012-07-09 | 2014-01-09 | Deere & Company | Navigation System and Method for Autonomous Mower |
| US9026299B2 (en) * | 2012-07-09 | 2015-05-05 | Deere & Company | Navigation system and method for autonomous mower |
| JP2016091468A (ja) * | 2014-11-10 | 2016-05-23 | 株式会社豊田中央研究所 | 目標軌跡算出装置及びプログラム |
| JP2020006845A (ja) * | 2018-07-10 | 2020-01-16 | 株式会社明電舎 | 線路曲率推定装置及び方法 |
| JP7020324B2 (ja) | 2018-07-10 | 2022-02-16 | 株式会社明電舎 | 線路曲率推定装置及び方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5760523B2 (ja) | 2015-08-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5804185B2 (ja) | 移動物体位置姿勢推定装置及び移動物体位置姿勢推定方法 | |
| JP5966747B2 (ja) | 車両走行制御装置及びその方法 | |
| US9740942B2 (en) | Moving object location/attitude angle estimation device and moving object location/attitude angle estimation method | |
| JP4962581B2 (ja) | 区画線検出装置 | |
| JP2020064046A (ja) | 車両位置決定方法及び車両位置決定装置 | |
| US8655023B2 (en) | Road profile defining apparatus, road profile defining method, and road profile defining program | |
| JP5834933B2 (ja) | 車両位置算出装置 | |
| US20160305785A1 (en) | Road surface detection device and road surface detection system | |
| JP5310027B2 (ja) | 車線認識装置、及び車線認識方法 | |
| US20160217583A1 (en) | Object detection apparatus and object detection method | |
| US20170084048A1 (en) | Measurement device and measurement method | |
| JP2012159469A (ja) | 車両用画像認識装置 | |
| JP2018048949A (ja) | 物体識別装置 | |
| JP6044084B2 (ja) | 移動物体位置姿勢推定装置及び方法 | |
| JP5760523B2 (ja) | 走路推定装置及びプログラム | |
| CN103523021B (zh) | 车道线检测可信度计算方法及执行其的计算装置 | |
| JP2012159470A (ja) | 車両用画像認識装置 | |
| CN113345035A (zh) | 一种基于双目相机的坡度即时预测方法、系统及计算机可读存储介质 | |
| JP5903901B2 (ja) | 車両位置算出装置 | |
| JP2014067320A (ja) | ステレオカメラ装置 | |
| JP5891802B2 (ja) | 車両位置算出装置 | |
| JP2007011490A (ja) | 道路パラメータ検出装置および道路パラメータ検出方法 | |
| JP5472137B2 (ja) | 境界検出装置、および境界検出プログラム | |
| JP2013183311A (ja) | 車載カメラの姿勢角推定装置及び検出システム | |
| JP5811868B2 (ja) | 運動推定装置及びプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140207 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140917 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140924 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20141125 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150512 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150525 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5760523 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |