JP2012190702A - 一体型可逆接触器 - Google Patents
一体型可逆接触器 Download PDFInfo
- Publication number
- JP2012190702A JP2012190702A JP2011054283A JP2011054283A JP2012190702A JP 2012190702 A JP2012190702 A JP 2012190702A JP 2011054283 A JP2011054283 A JP 2011054283A JP 2011054283 A JP2011054283 A JP 2011054283A JP 2012190702 A JP2012190702 A JP 2012190702A
- Authority
- JP
- Japan
- Prior art keywords
- contact
- fixed
- mover
- movable
- iron core
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images





Landscapes
- Driving Mechanisms And Operating Circuits Of Arc-Extinguishing High-Tension Switches (AREA)
Abstract
【課題】大電流を流す用途において接続関係の切替に用いた場合でも回生電流による電源への障害が抑制され、しかも、接続関係の切替の際の時間を調節可能にする。
【解決手段】電磁石装置2は、励磁用巻線231、232への通電状態に応じて規定した2位置の間で移動する可動子25を備える。接点装置3は、可動子25からの駆動力が伝達されることにより移動する可動接触子361、362、363を備え切替接点を構成する。駆動回路4は、可動子25が2位置の間で移動する遷移期間において励磁用巻線231、232に通電する電流を調節することにより可動子25の移動速度を調節する。
【選択図】図1
【解決手段】電磁石装置2は、励磁用巻線231、232への通電状態に応じて規定した2位置の間で移動する可動子25を備える。接点装置3は、可動子25からの駆動力が伝達されることにより移動する可動接触子361、362、363を備え切替接点を構成する。駆動回路4は、可動子25が2位置の間で移動する遷移期間において励磁用巻線231、232に通電する電流を調節することにより可動子25の移動速度を調節する。
【選択図】図1
Description
本発明は、電磁石を用いて接点の切替を行う一体型可逆接触器に関するものである。
一般に、電動機のような負荷は電源との接続関係を変更することによって動作が変化する。たとえば、三相誘導電動機は、三相誘導電動機の各端子U、V、Wに対し、三相交流のR相、S相、T相をそれぞれ接続する場合と、三相交流のT相、S相、R相をそれぞれ接続する場合とで、移動(回転または直進)する向きが逆になる。また、直流電力で駆動される負荷には、直流電源の極性を変えることにより、動作が変化するものがある。
負荷に対する電源の接続関係を変更するには、機械式の接点を備えるスイッチ要素を用いる場合と、半導体スイッチのような無接点のスイッチ要素を用いる場合とがある。後者のスイッチ要素は、接続関係を切り換える際にアークが発生しないという利点があるが、オン時の電気抵抗が比較的大きいから、負荷に大電流を流す場合には不利益になる。したがって、アークの発生という不利益があるものの機械式の接点を備えるスイッチ要素は依然として広く用いられている。
この種のスイッチ要素としては、たとえば、図5、図6に示す構成の電磁接触器が用いられている(たとえば、特許文献1、特許文献2参照)。この電磁接触器の器体100は、電磁石装置200を収納したボディ110と、接点装置300を収納したカバー120とを結合して形成される。
電磁石装置200は、固定鉄芯210と可動鉄芯220と励磁用巻線230とを備える。固定鉄芯210および可動鉄芯220は、それぞれ3本の脚片の一端部を連結したE字状に形成され、脚片の先端面同士を対向させて配置される。固定鉄芯210と可動鉄芯220との中央の脚片は励磁用巻線230に挿入される。また、可動鉄芯220は、弾性を有する線材を曲げてC字状に形成した復帰ばね260と結合され、復帰ばね260の一部はボディ110に取り付けられる。
可動鉄芯220は、励磁用巻線230に通電していない状態では、復帰ばね260から受ける力によって固定鉄芯210から離れて位置し、励磁用巻線230に通電している状態では、固定鉄芯210に吸引され固定鉄芯210に接触する。つまり、可動鉄芯220は、励磁用巻線230に通電する状態と通電しない状態とで、規定された2つの位置の間で移動する。
一方、接点装置300は、カバー120に固定された固定接点340、350と、可動鉄芯220の移動に伴って固定接点340、350に対して移動する可動接触子360とを備える。可動接触子360は、可動鉄芯220に結合された可動枠380に保持されている。固定接点340、350は1つの電路上に一対設けられ、可動接触子360は、一対の固定接点340、350に接触して両固定接点340、350の間を短絡する位置と、固定接点340、350から離れる位置との規定された2位置の間で移動する。
以下では、上述のような構成を備えた電磁接触器を用いて、電動機の正転と逆転とを切り換える場合を考える。電動機は、回転型の三相誘導電動機を想定する。この場合、電動機の正転と逆転とを切り換えるために、図7に示す構成を用いることが考えられる。図示例では、三相交流である電源20の電圧の位相(R相、S相、T相)と、電動機30の接続端子301、302、303(U端子、V端子、W端子)との間に、2個の電磁接触器101、102を接続している。
一方の電磁接触器101は、3組の接点セット411、412、413と、接点セット411、412、413を開閉させる電磁石装置201とを備える。また、他方の電磁接触器102は、3組の接点セット421、422、423と、接点セット421、422、423を開閉させる電磁石装置202とを備える。ここに、「接点セット」は、それぞれ2個の固定接点と1個の可動接触子とからなり、可動接触子を介して2個の固定接点の間を導通させる状態と、可動接触子が2個の固定接点から離れる状態とを選択することができる装置を意味する。
個々の電磁接触器101、102は上述した電磁接触器と同様の構成を備える。すなわち、電磁石装置201、202は電磁石装置200と同様の構成を備え、接点セット411、412、413、421、422、423は接点装置300と同様の構成を備える。ただし、図7に示す構成では、電磁石装置201が3組の接点セット411、412、413を開閉させ、電磁石装置202が3組の接点セット421、422、423を開閉させる。
電磁接触器101は、電源20のR相、S相、T相と電動機30の接続端子301、302、303(U端子、V端子、W端子)とを一対一に接続する電路を形成する。また、他方の電磁接触器102は、電源20のR相、S相、T相を電動機30の接続端子303、302、301(W端子、V端子、U端子)とを一対一に接続する電路を形成する。すなわち、電磁接触器101は正転用になり、電磁接触器102は逆転用になる。
ところで、図7の構成では、電磁接触器101の接点セット411、412、413と、電磁接触器102の接点セット421、422、423とが同時に投入されると、電源20の相間が短絡することになる。また、電動機30の回転向きを変更する際に慣性によって電動機30が回転している期間は回生電流が生じるから、この期間に電動機30を電源20に接続すると、回生電流が電源20に逆流し、電源20に障害が生じるおそれがある。
電動機30の正転と逆転との切替に2個の電磁接触器101、102を用いる場合、両電磁接触器101、102に機械的に結合されるインターロックユニット(図示せず)を用いることが多い。インターロックユニットは、両電磁接触器101、102が同時に投入されるのを防止する機能を有している。
電磁接触器101、102は、上述のように、可動鉄芯220を定位置に移動させるためにC字状に形成した復帰ばね260を用いている。この形状の復帰ばね260を用いると、コイルばねを用いる場合に比較して、接点の開閉(とくに、開放)の速度を低減させることができる。すなわち、電動機30の正転と逆転とを切り換える際に生じる回生電流による電源20への障害が抑制されることになる。
具体的には、C字状の復帰ばね260を用いると、接点装置300が閉じた状態から開く状態に移行する速度が、図8に示すように、コイルばねの半分程度になり、接点装置300の開放(遮断)の際のアークエネルギーを大幅に低減させることができる。ただし、接点装置300の移行速度は遅いほどよいわけではなく、遅すぎる場合には再点弧を生じて、アークエネルギーがかえって増大する場合もある。したがって、接点装置300が閉じた状態から開く状態に移行する速度は、接点装置300の遮断時におけるアークエネルギーの低減にとって重要な要素である。
ところで、上述のように電動機の正転と逆転とを切り換えるには、2個の電磁接触器101、102とインタロックユニットとが必要になり、3個の装置が必要になる上に、占有スペースも比較的大きくなるという問題が生じる。
また、回生電流による電源への障害は、C字状の復帰ばね260を用いることによって改善されてはいるが、復帰ばね260は電磁接触器101、102の器体に内蔵されているから、可動接触子360の移動速度を自由に調節することはできない。すなわち、電磁接触器101、102を利用する箇所に応じて可動接触子360の移動速度を調節しようとすれば、復帰ばね260の特性が異なる複数種類の電磁接触器101、102を製造することが必要になる。このことは、電磁接触器101、102の動作のばらつきについて許容範囲を狭めることになり、不良品の発生率を高めて歩留まりの低下になる上に、複数種類の製品の製造や在庫のための設備が必要になり、結果的にコスト増につながるという問題が生じる。
本発明は、大電流を流す用途において接続関係の切替に用いた場合でも回生電流による電源への障害が抑制され、しかも、接続関係の切替の際の時間を調節可能にした一体型可逆接触器を提供することを目的とする。
本発明に係る一体型可逆接触器は、励磁用巻線への通電状態に応じて規定した2位置の間で移動する可動子を備える電磁石装置と、可動子からの駆動力が伝達されることにより移動する可動接触子を備え切替接点を構成する接点装置と、可動子が2位置の間で移動する遷移期間において励磁用巻線に通電する電流を調節することにより可動子の移動速度を調節する駆動回路とを備えることを特徴とする。
この一体型可逆接触器において、駆動回路は、可動子を2位置の間で移動させる遷移期間に励磁用巻線に通電する励磁電流を断続させるスイッチング素子と、スイッチング素子の導通期間と非導通期間とを制御する制御回路とを備えることが好ましい。
この一体型可逆接触器において、接点装置は、可動子が2位置の一方に位置する状態で可動接触子を介して導通する2個の第1の固定接点と、可動子が2位置の他方に位置する状態で可動接触子を介して導通する2個の第2の固定接点とを備え、第1の固定接点と第2の固定接点と可動接触子とにより1組の接点セットが構成されていることが好ましい。
この一体型可逆接触器において、接点装置は、接点セットを2組または3組備え、第1の接点セットにおける第1の固定接点の一方と第2の接点セットにおける第2の固定接点の一方とが電気的に接続され、第1の接点セットにおける第2の固定接点の一方と第2の接点セットにおける第1の固定接点の一方とが電気的に接続され、残りの第1の固定接点および第2の固定接点は接点セット内で互いに電気的に接続されていることがさらに好ましい。
本発明の構成によれば、励磁用巻線に通電する電流を調節することにより、可動接触子を移動させる可動子の移動速度を調節しているから、大電流を流す用途において接続関係の切替に用いた場合でも回生電流による電源への障害が抑制されるという利点があり、また、駆動回路を用いて可動子の移動速度を調節するから、接続関係の切替の際の時間が電気的に調節され、結果的に製品品種を増加させる必要がないという利点がある。
以下に説明する実施形態では、工場などでワークを吊り下げ、電動機の動力を用いて移動するホイストクレーンに用いることを想定して説明するが、一体型可逆接触器の用途を限定する趣旨ではない。ホイストクレーンは、水平面内でレールに沿って走行する機能と、ワークの昇降を行う機能とを備えており、ホイストクレーンの電動機は、正転と逆転とを行う必要がある。電動機は、回転型の三相誘導電動機を想定している。
したがって、電源20(図2参照)は、三相交流であり、電源20と電動機30との間に、電動機30の正転と逆転とを選択するために、本実施形態の一体型可逆接触器10が設けられる。以下では、電源20から出力される電圧の位相を、R相、S相、T相として説明する。一方、電動機30は、三相誘導電動機であるから三相分の接続端子をU端子、V端子、W端子として説明する。
電源20と電動機30との間に設けられた一体型可逆接触器10は、図1、図2に示すように、電源20が接続される3個の端子141、142、143を器体(図示せず)に備える。また、一体型可逆接触器10は、電動機30のU端子、V端子、W端子が接続される3個の端子151、152、153を器体(図示せず)に備える。器体は合成樹脂成形品のような絶縁材料により形成される。
器体は、電磁石装置2を収納したボディ(図示せず)と、接点装置3を収納したカバー(図示せず)とを結合して形成される。ボディとカバーとは、合成樹脂成形品のほかセラミックスの成形品を用いて形成される場合もある。とくに、接点装置3を収納するカバーは耐アーク性の観点からセラミックスを用いることが好ましい。また、接点装置3を収納する空間は気密性を有し、水素のように熱伝導率の高い消弧性ガスを封入することが好ましい。消弧性ガスとして水素を用いるのは、アークにより発生した熱の放熱性を高め、冷却により消弧を促進することが期待されるからである。また、水素は還元性を有するから、分解物が接点表面に付着することがなく、接点表面が清浄な状態に維持される。
電磁石装置2は、固定鉄芯21と可動鉄芯22と2個の励磁用巻線231、232とを備える。固定鉄芯21は、筒状の周壁211と、周壁211の軸線に沿う方向の両端面に配置された2枚の底板212、213とを備える形状に磁性体により形成されている。固定鉄芯21は、底板212、213の外周縁が円形になる円筒状のほか、底板212、213の外周縁が多角形状になる多角筒状など、適宜の筒状に形成される。底板212、213は、必ずしも周壁211の両端面を閉塞する必要はなく、底板212、213は中央部が貫通していてもよい。
各底板212、213は、それぞれ周壁211の内部空間に臨む表裏の一面に突設された柱状の磁極凸部214、215を備える。すなわち、底板212の一面の中央部に磁極凸部214が一体に突設され、底板213の一面の中央部に磁極凸部215が一体に突設され、磁極凸部214、215は先端面を互いに対向させるように配置される。
周壁211の軸線に沿う方向の中央部には、周壁211の内周面に一体に突設された環状の磁極板216が形成される。磁極板216は、磁極凸部214、215の先端面間の中央付近に位置し、磁極板216は、磁極凸部214、215の先端面の形状に略一致する形状に開口した貫通孔217を中央部に備える。
固定鉄芯21の内部空間には、筒状の巻き枠(図示せず)に巻装された2個の励磁用巻線231、232が配置される。巻き枠は、内周面の断面形状が磁極板216に設けた貫通孔217の開口形状に略一致している。励磁用巻線231は、底板212と磁極板216との間に配置され、励磁用巻線232は、底板213と磁極板216との間に配置される。したがって、励磁用巻線231に通電すると底板212と磁極板216とが励磁され、励磁用巻線232に通電すると底板213と磁極板216とが励磁される。
すなわち、固定鉄芯21は、各底板212、213にそれぞれ設けた2個の磁極凸部214、215と、周壁211に設けた磁極板216との3個の磁極部を備えることになる。また、周壁211および底板212、213が各一対の磁極部の間を磁気結合する継鉄部として機能することになる。
上述の構成例は、1個の巻き枠に1個の励磁用巻線231、232を巻装して2個の巻き枠を設ける場合を想定しているが、1個の巻き枠に2個の励磁用巻線231、232を巻装してもよい。また、磁極凸部214、215は必須ではなく、底板212、213を磁極に用いてもよい。さらに、底板212、213は、磁極板216と同様に環状に形成することも可能である。
上述した固定鉄芯21は、軸線を含む平面で2分割した形状の2部材を組み合わせることにより形成する。また、周壁211と底板212、213との3部材を組み合わせることにより形成してもよい。また、固定鉄芯21は、必ずしも筒状に形成しなくてもよく、断面E字状に形成した2部材を向かい合わせに組み合わせることにより形成してもよい。
ところで、巻き枠内には、磁性体で棒状に形成された可動鉄芯22が配置される。可動鉄芯22は、固定鉄芯21の軸線に沿う方向において移動可能であって、移動方向においては、各一方の磁極凸部214、215の先端面と磁極板216の側面との間の距離に略等しい長さを有する。また、可動鉄芯22は、移動方向に直交する断面において、断面形状が巻き枠の内側面の断面形状に略一致する。
上述したように、励磁用巻線231に通電すると底板212と磁極板216とが励磁されるから、可動鉄芯22は、底板212に設けた磁極凸部214と磁極板216との磁気抵抗を低減するように磁極凸部214に近付く向きに移動する。一方、励磁用巻線232に通電すると底板213と磁極板216とが励磁されるから、可動鉄芯22は、底板213に設けた磁極凸部215と磁極板216との磁気抵抗を低減するように磁極凸部215に近付く向きに移動する。
すなわち、2個の励磁用巻線231、232の各一方に選択的に通電することにより、可動鉄芯22を規定した2位置の間で移動させることができる。以下では、励磁用巻線231にのみ通電したときの可動鉄芯22の位置を第1位置と呼び、励磁用巻線232にのみ通電したときの可動鉄芯22の位置を第2位置と呼ぶ。上記構成では、可動鉄芯22を第1位置に保持しようとすれば励磁用巻線231に通電し続ける必要がある。また、可動鉄芯22を第2位置に保持しようとすれば励磁用巻線232に通電し続ける必要がある。
一方、固定鉄芯21または可動鉄芯22に永久磁石を設けて有極型の電磁石を構成してもよい。この構成では、可動鉄芯22が第1位置または第2位置に移動した後に、励磁用巻線231、232への通電を停止しても、可動鉄芯22の位置を保持することが可能になる。すなわち、励磁用巻線231、232に通電することなく、可動鉄芯22を第1位置と第2位置とのいずれかの位置に保持することができ、いわゆる双安定の動作になる。
また、可動鉄芯22に第1位置と第2位置との一方の位置に向かう向きの力を与えるばねが設けられていれば、可動鉄芯22を他方の位置に移動させるための1個の励磁用巻線を設けるだけで、可動鉄芯22を2位置の間で移動させることが可能になる。この構成では、励磁用巻線が1個だけになり、可動鉄芯22を前記他方の位置に保持し続けるには、励磁用巻線に通電し続けることになる。ただし、可動鉄芯22を前記他方の位置に保持するには励磁用巻線への通電を停止すればよい。すなわち、この構成を採用すれば、いわゆる単安定の動作になる。
可動鉄芯22には、固定鉄芯21の一方の底板212に挿し通された駆動軸24が一体に結合される。したがって、駆動軸24は、可動鉄芯22の移動に伴って底板212からの突出量を変化させる。また、可動鉄芯22と駆動軸24とは一体となって可動子25として機能する。
ところで、接点装置3は、3組の接点セット31、32、33を備える。3組の接点セット31、32、33は、それぞれ切替接点を構成しており、同様の構成を備えているので、以下では、代表例として接点セット(第1の接点セット)31について説明し、必要に応じて他の接点セット(第2の接点セット、第3の接点セット)32、33との関係を説明する。また、接点セット31を構成する部材に付与した符号の末尾の「1」を「2」「3」に読み替えることによって、他の接点セット32、33の構成に対応する。
1組の接点セット31は、カバーに対して固定された4個の固定接点321、331、341、351と、固定接点321、331、341、351に離接する1個の可動接触子361とを備えている。可動接触子361は、銅のような導電性材料を用いて板状に形成されている。また、3個の接点セット31、32、33を構成する3個の可動接触子361、362、363は絶縁材料により形成された可動枠(図示せず)に接圧ばね(図示せず)とともに保持される。
可動枠は、後述するように、電磁石装置2の駆動軸24(可動子25)に連結され、可動子25からの駆動力が伝達されることにより、駆動軸24が移動する方向に直進移動する。また、可動接触子361は、可動枠が移動する方向に対して直交するように配置され、可動枠の移動に伴って厚み方向に移動する。
接圧ばねは、コイルばねであって、可動接触子361を厚み方向の両側から支持する。すなわち、接圧ばねは可動接触子361の厚み方向の各一面と可動枠との間に配置され、接圧ばねのばね力によって可動接触子361を可動枠に対して支持する。なお、この構成例では、3個の接点セット31、32、33で1個の可動枠を共用しているが、接点セット31、32、33ごとに可動枠を個別に設けてもよい。また、3個の可動接触子361、362、363は、同じ平面上に配列するのが好ましいが、厚み方向に配列することも可能である。
1組の接点セット31に設けられている4個の固定接点321、331、341、351は、可動接触子361に沿って2個ずつ並べて配置され、かつ2個ずつ対向するように配置される。つまり、固定接点321と固定接点331とが可動接触子361に沿って並び、固定接点341と固定接点351とが可動接触子361に沿って並ぶ。また、固定接点321と固定接点341とが対向するように配置され、固定接点331と固定接点351とが対向するように配置される。以下では、固定接点321および固定接点331を第1の固定接点と呼び、固定接点341および固定接点351を第2の固定接点と呼ぶ。第1の固定接点(321、331)と第2の固定接点(341、351)とは可動接触子361の厚み方向に離間して配置され、第1の固定接点と第2の固定接点との間に可動接触子361が配置される。
上述した構成により、電磁石装置2の駆動軸24(可動子25)が移動すると、可動子25からの駆動力が可動枠に伝達されて可動枠が移動する。さらに、可動枠の移動に伴って可動接触子361が第1の固定接点(321、331)と第2の固定接点(341、351)との一方に選択的に接触する。言い換えると、可動接触子361は、第1の固定接点である2個の固定接点321、331を導通させる位置と、第2の固定接点である2個の固定接点341、351を導通させる位置との規定された2位置の間で移動する。要するに、接点セット31は、可動子25が規定された2位置の一方に位置する状態で可動接触子361を介して導通する2個の第1の固定接点(321、331)を備える。また、接点セット31は、可動子25が規定された2位置の他方に位置する状態で可動接触子361を介して導通する2個の第2の固定接点(341、351)を備える。
可動子25が移動する距離は、第1の固定接点と第2の固定接点との距離よりも大きく設定されており、可動接触子361が第1の固定接点と第2の固定接点との一方に接触した状態では接圧ばねが伸縮する。すなわち、接圧ばねの伸縮量は、可動接触子361が第1の固定接点または第2の固定接点に接触した後の可動枠の移動量(つまり、オーバートラベル量)により決まる。
ところで、接点セット31における第1の固定接点の一方(固定接点331)と、接点セット33における第2の固定接点の一方(固定接点353)とは電気的に接続される。また、接点セット31における第2の固定接点の一方(固定接点351)と、接点セット33における第1の固定接点の一方(固定接点333)とは、電気的に接続される。残りの第1の固定接点および第2の固定接点は、接点セット内で互いに電気的に接続される。すなわち、接点セット(第1の接点セット)31では、固定接点321と固定接点341とが電気的に接続される。また、接点セット(第2の接点セット)32では、固定接点322と固定接点342とが電気的に接続され、かつ固定接点332と固定接点352とが電気的に接続される。さらに、接点セット(第3の接点セット)33では、固定接点323と固定接点343とが電気的に接続される。
ここに、固定接点331と固定接点353とは端子153に接続され、固定接点351固定接点333とは端子151に接続される。また、固定接点332と固定接点352とは端子152に接続される。一方、端子141は固定接点321と固定接点341とに接続され、端子142は固定接点322と固定接点342とに接続され、端子143は固定接点323と固定接点343とに接続される。
上述した構成では、励磁用巻線231、232の一方を選択して通電することにより、可動子25を規定された2位置の一方の位置に選択的に移動させることになる。したがって、励磁用巻線231、232の通電状態に応じて、可動接触子361を介して2個の固定接点321、331が導通する状態と、可動接触子361を介して2個の固定接点341、351が導通する状態とを選択することができる。
ところで、上述した一体型可逆接触器10を電動機30の正転と逆転とを切り替えるために用いる場合は、図2のように接続する。すなわち、電源20のR相、S相、T相は、一体型可逆接触器10の端子141、142、143に個々に接続され、電動機30のU端子、V端子、W端子は、一体型可逆接触器10の端子151、152、153に個々に接続される。電源20と一体型可逆接触器10と電動機30とがこの関係で接続されていれば、励磁用巻線231、232の一方を選択して通電ことにより、電源20と電動機30との接続関係を変更し、電動機30の正転と逆転とを切り替えることができる。
上述した動作では、電動機30の正転と逆転との通電状態が択一的に選択されるから、正転時の通電状態と逆転時の通電状態とが同時に生じることはない。すなわち、インタロックユニットにより実現されている機能のうち、電動機30の正転と逆転との通電状態を同時に生じさせない機能を実現することができる。しかしながら、正転と逆転とを切り替える遷移期間を比較的長くとる機能は、上述した構成のみでは実現できない。
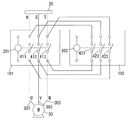
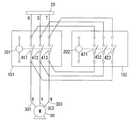
そこで、本実施形態では、図1に示すように、励磁用巻線231と励磁用巻線232との一方に通電する状態から他方に通電する状態への遷移期間において、励磁用巻線231、232に通電する電流を調節する駆動回路4を設けている。駆動回路4は、2個の励磁用巻線231、232に個々に直列接続された少なくとも2個のスイッチング素子41、42を備える。さらに、駆動回路4は、個々のスイッチング素子41、42の導通期間と非導通期間とを制御する制御回路43を備える。
この駆動回路4は、制御回路43によってスイッチング素子41、42の導通期間と非導通期間とを制御するから、個々の励磁用巻線231、232に通電する励磁電流を断続させることができる。すなわち、制御回路43は、スイッチング素子41、42の導通期間と非導通期間との比率(デューティ比)を調節することにより、励磁用巻線231、232に通電する励磁電流の時間変化を調節する。導通期間と非導通期間とは、可動子25が規定された2位置の一方と他方との間で移動する最小時間に対して十分に短い時間であることが好ましいが、この条件が必須というわけでははない。
駆動回路4から励磁用巻線231、232に通電する励磁電流(デューティ比)は、たとえば、図3のように時間経過に伴って変化させる。図3に示す動作例において、駆動回路4は、可動子25の移動を開始する時点では、比較的大きい励磁電流を流しているが、移動が開始されると励磁電流を減少させることにより可動子25に作用する加速度を低減させている。その後、可動子25の移動が終了に近付くと励磁電流を増加させる。図3に示す動作例では、可動子25を移動させるために、駆動回路4は、一方の励磁用巻線231、232にのみ励磁電流を流している。励磁用巻線231、232に通電する励磁電流が図3に示すように変化すると、励磁電流を減少させない場合に比較すると、可動子25は、遷移期間における移動速度が低下することになる。
すなわち、駆動回路4により励磁電流が調節されることにより、遷移期間が引き延ばされ、電動機30の正転と逆転とを切り替える際の切替時間が引き延ばされる。したがって、電動機30の正転と逆転とを切り替える際に発生する回生電流は、電源20に回り込みにくくなり、回生電流による電源20への影響を軽減することができる。
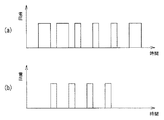
ところで、駆動回路4は、励磁用巻線231、232ごとにスイッチング素子41、42を備えているから、2つの励磁用巻線231、232に通電する励磁電流を調節することによっても、可動子25の移動速度を調節することができる。すなわち、図4(a)に示すように、駆動回路4は、可動子25を移動を開始するために、一方の励磁用巻線(たとえば、231)への通電を開始し、図4(b)に示すように、その直後に、他方の励磁用巻線(たとえば、232)への通電も開始する。
可動子25の移動を開始させる一方の励磁用巻線(たとえば、231)だけではなく他方の励磁用巻線(たとえば、232)にも通電することは、可動子25が移動を開始した後に制動していることになる。したがって、可動子25に作用する加速度を低減させるのではなく、逆向きの加速度を可動子25に作用させることになり、図3の動作に比較すると、可動子25の移動速度を一層低減させることになる。
上述した動作例では、駆動回路4は、励磁電流の通電を開始してからの経過時間に応じて通電電流を規定している。この制御によって、制御を行わない場合に比較すれば、遷移期間を増加させることができるが、オープン制御であるから遷移期間にばらつきを生じる可能性がある。したがって、可動子25の位置を検出する位置センサを設け、位置センサが検出した可動子25の位置に応じて励磁電流を調節するようにしてもよい。
また、上述した構成では、固定鉄芯21と可動鉄芯22とのいずれにも永久磁石を用いていないが、永久磁石を含む有極型の電磁石装置2を用いてもよい。また、電磁石装置2が有極型であれば、可動子25が第1位置と第2位置とに位置する際に励磁用巻線231、232に励磁電流を流す必要がないから、省エネルギーになるという利点がある。とくに、可動鉄芯22に永久磁石を用いた有極型の電磁石装置2を用いると、遷移期間において磁力を用いて可動鉄芯22を静止させることが可能になり、遷移期間を任意に調節することが可能になる。
また、極性を持たない電磁石装置2を用いると、有極型の電磁石装置2に比べてエネルギーの利用効率が低下するが、永久磁石が不要であって材料コストを低減できる利点がある。さらに、第1位置と第2位置とのうちの一方では磁力を用いて保持し、他方ではばね力を用いて保持する構成の電磁石装置2を採用することも可能である。さらに、スイッチング素子に代えてインピーダンス要素を用いて励磁用巻線231、232に通電する電流を調節する構成を採用しても同様の動作を行うことができる。ただし、この構成を採用すると損失がやや増加する可能性がある。
上述した実施形態では、電動機30として三相誘導電動機を例示したので、3組の接点セット31、32、33を備える例を示したが、単相の電動機であれば接点装置3には、2組の接点セットがあればよい。また、上述の構成は、1回路に2個の固定接点(たとえば、固定接点321、331)が挿入される2点切りの構成例であるが、1回路に1個の固定接点が挿入される1点切りの構成を採用することも可能である。
2 電磁石装置
3 接点装置
4 駆動回路
25 可動子
31、32、33 接点セット
41、42 スイッチング素子
43 制御回路
231、232 励磁用巻線
321、331 第1の固定接点
322、332 第1の固定接点
323、333 第1の固定接点
341、351 第2の固定接点
342、352 第2の固定接点
343、353 第2の固定接点
3 接点装置
4 駆動回路
25 可動子
31、32、33 接点セット
41、42 スイッチング素子
43 制御回路
231、232 励磁用巻線
321、331 第1の固定接点
322、332 第1の固定接点
323、333 第1の固定接点
341、351 第2の固定接点
342、352 第2の固定接点
343、353 第2の固定接点
Claims (4)
- 励磁用巻線への通電状態に応じて規定した2位置の間で移動する可動子を備える電磁石装置と、前記可動子からの駆動力が伝達されることにより移動する可動接触子を備え切替接点を構成する接点装置と、前記可動子が前記2位置の間で移動する遷移期間において前記励磁用巻線に通電する電流を調節することにより前記可動子の移動速度を調節する駆動回路とを備えることを特徴とする一体型可逆接触器。
- 前記駆動回路は、前記可動子を前記2位置の間で移動させる遷移期間に前記励磁用巻線に通電する励磁電流を断続させるスイッチング素子と、前記スイッチング素子の導通期間と非導通期間とを制御する制御回路とを備えることを特徴とする請求項1記載の一体型可逆接触器。
- 前記接点装置は、前記可動子が前記2位置の一方に位置する状態で前記可動接触子を介して導通する2個の第1の固定接点と、前記可動子が前記2位置の他方に位置する状態で前記可動接触子を介して導通する2個の第2の固定接点とを備え、前記第1の固定接点と前記第2の固定接点と前記可動接触子とにより1組の接点セットが構成されていることを特徴とする請求項1又は2記載の一体型可逆接触器。
- 前記接点装置は、前記接点セットを2組または3組備え、第1の接点セットにおける前記第1の固定接点の一方と第2の接点セットにおける前記第2の固定接点の一方とが電気的に接続され、第1の接点セットにおける前記第2の固定接点の一方と第2の接点セットにおける前記第1の固定接点の一方とが電気的に接続され、残りの前記第1の固定接点および前記第2の固定接点は接点セット内で互いに電気的に接続されていることを特徴とする請求項3記載の一体型可逆接触器。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011054283A JP2012190702A (ja) | 2011-03-11 | 2011-03-11 | 一体型可逆接触器 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011054283A JP2012190702A (ja) | 2011-03-11 | 2011-03-11 | 一体型可逆接触器 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012190702A true JP2012190702A (ja) | 2012-10-04 |
Family
ID=47083644
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011054283A Withdrawn JP2012190702A (ja) | 2011-03-11 | 2011-03-11 | 一体型可逆接触器 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012190702A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107681863A (zh) * | 2017-11-07 | 2018-02-09 | 中国计量大学 | 机械按压微能量收集装置 |
| JP2020162194A (ja) * | 2019-03-25 | 2020-10-01 | 株式会社日立製作所 | 回転電機の巻線切替装置、回転電機駆動システム、並びに電動機器 |
-
2011
- 2011-03-11 JP JP2011054283A patent/JP2012190702A/ja not_active Withdrawn
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107681863A (zh) * | 2017-11-07 | 2018-02-09 | 中国计量大学 | 机械按压微能量收集装置 |
| CN107681863B (zh) * | 2017-11-07 | 2023-06-16 | 中国计量大学 | 机械按压微能量收集装置 |
| JP2020162194A (ja) * | 2019-03-25 | 2020-10-01 | 株式会社日立製作所 | 回転電機の巻線切替装置、回転電機駆動システム、並びに電動機器 |
| JP7262262B2 (ja) | 2019-03-25 | 2023-04-21 | 株式会社日立製作所 | 回転電機の巻線切替装置、回転電機駆動システム、並びに電動機器 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5806562B2 (ja) | 電磁接触器 | |
| KR100899432B1 (ko) | 절전형 전자 접촉기 | |
| CN110100292B (zh) | 电磁继电器 | |
| US9576714B2 (en) | Magnetic actuator | |
| JP5710984B2 (ja) | 電磁接触器 | |
| JP7076633B2 (ja) | 直流リレー | |
| JP5537393B2 (ja) | 巻線切替装置、およびこれを用いた回転電機 | |
| JP2015159131A (ja) | 電磁接触器 | |
| JP2016072020A (ja) | 接点装置 | |
| CN106486324A (zh) | 继电器 | |
| JP4667664B2 (ja) | 電力用開閉装置 | |
| CN113035648A (zh) | 触头装置及电磁开关 | |
| JP2012151114A (ja) | 電気スイッチ装置 | |
| WO2016177009A1 (zh) | 接触器和接触器系统 | |
| JP7002042B2 (ja) | 電磁継電器 | |
| JP6726871B2 (ja) | 電磁継電器 | |
| CN108573828A (zh) | 用于中压配电装置的开关设备 | |
| JP2012190702A (ja) | 一体型可逆接触器 | |
| JP7042452B2 (ja) | 電磁継電器及び制御方法 | |
| JP4158876B2 (ja) | 電力用開閉装置の操作装置 | |
| JP2016025169A (ja) | 操作器または電力用開閉機器 | |
| JP2018107046A (ja) | 駆動回路及び接点装置 | |
| JP2009016514A (ja) | 電磁アクチュエータおよびこれを用いた開閉機器 | |
| JP4483416B2 (ja) | 電磁アクチュエータならびにそれを用いた開閉器および開閉装置 | |
| JPH0643984Y2 (ja) | 回転方向転換可能な電気駆動装置の制御回路 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A300 | Withdrawal of application because of no request for examination |
Free format text: JAPANESE INTERMEDIATE CODE: A300 Effective date: 20140513 |