JP2012249610A - 歩行型作業機 - Google Patents
歩行型作業機 Download PDFInfo
- Publication number
- JP2012249610A JP2012249610A JP2011126553A JP2011126553A JP2012249610A JP 2012249610 A JP2012249610 A JP 2012249610A JP 2011126553 A JP2011126553 A JP 2011126553A JP 2011126553 A JP2011126553 A JP 2011126553A JP 2012249610 A JP2012249610 A JP 2012249610A
- Authority
- JP
- Japan
- Prior art keywords
- steering handle
- fulcrum
- pipe
- posture
- bracket
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images








Landscapes
- Soil Working Implements (AREA)
- Harvester Elements (AREA)
Abstract
【解決手段】作業者が操作する操作部Mを有し且つ旋回操作及び上下角度変更操作可能に作業機本体Aに連結される操縦ハンドルHを備える歩行型作業機であって、操縦ハンドルHが、上下方向に折り曲げ用の支点20を長手方向の中間部分に備え、操縦ハンドルHの操作部側部分P2を、操縦ハンドルHが直線状となる非折り曲げ姿勢から、操縦ハンドルHの作業機本体側部分P1の上方に折り畳むことができ、且つ、非折り曲げ姿勢から下方に折り曲げることができるように構成されており、支点20に前記操縦ハンドルの姿勢を変更可能に固定する固定手段を設けてある。
【選択図】図9
Description
また、作業者は、作業中に操縦ハンドルが障害物に接触しないよう旋回操作及び上下角度変更操作を行って位置調整を行う必要がある。このとき、上下方向の角度を変更して作業を行う場合、例えば、上方に障害物があり操縦ハンドルを地面の近くまで下げなければならないような状況では、作業者が腰を下ろして作業しなければならず、また、下方に障害物があり操縦ハンドルを略垂直になるぐらいまで上方に上げなければならないような状況では、作業者が両腕をかなり上に上げたままで作業しなければならず、作業者に無理な姿勢を強いる場合があった。
本構成によれば、操縦ハンドルの操作部側部分を、操縦ハンドルが直線状となる非折り曲げ姿勢から、操縦ハンドルの作業機本体側部分の上方に折り畳むことによって、操縦ハンドル全体の長さを短くすることができるため、保管時や搬送時における収納スペースの小スペース化が図れる。
また、斜面(法面)における草刈作業を行う場合であって、尚且つ障害物が操縦ハンドルの下方にある場合、操縦ハンドルを上方側に揺動させ、さらに、操縦ハンドルの操作部側部分を、支点を中心として下方に折り曲げる。この状態によれば、作業者は、両腕を上に上げたままで作業しなくとも良く、通常の姿勢で草刈作業を実施することができる。
本構成によれば、支点を操縦ハンドルにおける上側に偏倚した位置に設けてあるため、操縦ハンドルの操作部側部分を、作業機本体側部分の上方に重なる位置まで折り曲げることができるようになり、簡易な構成でありながらも、操縦ハンドルの操作部側部分を確実に折り畳んで全体の長さを短くすることができる。
さらに、支点が操縦ハンドルの上方にあるため、操縦ハンドルの操作部側部分を下側に折り曲げる場合には、操縦ハンドルが所定の角度だけ下方に折れ曲がったとき、操縦ハンドルの操作部側部分と作業機本体側部分とが干渉するよう角度を規定する折り曲げ角度制限部を設けることが容易である。これにより、操縦ハンドルの操作部側部分の下側の折り曲げ角度を確保しつつ、操作部が地面と接触するほど過度に折れ曲がるのを規制することができる。
〔実施形態〕
図1〜図3に示すように、歩行型草刈機は、走行機体を構成する作業機本体Aと、長手方向に沿って伸縮操作可能に作業機本体Aに連結される操縦ハンドルHとを備える。
作業機本体Aは、前車輪1、後車輪2、ハウジング3、エンジン4、伝動ケース5、刈取機構C、及び走行伝動機構Dを備えて構成される。
図1及び図2に示すように、操縦ハンドルHは、延出端側に設けられる操作部Mと、ハウジング3の横側面に設けられるハンドル支持部Bに支持される基端部Eと、操作部Mと基端部Eとをつなぐパイプ部Pとを備える。
図2に示すように、操作部Mは、作業者が作業中に把持するループ状のグリップGと、主クラッチMCを操作する主クラッチレバー13と、前後進切換機構FRMを変速操作する前後進切換レバー14と、第1ロック機構L1の解除操作を行う第1ロック解除レバー15と、第2ロック機構L2の解除操作を行う第2ロック解除レバー16と、エンジン4の回転速度を設定するスロットル操作具17と、速度切換機構SMを操作する変速操作具18と、刈取クラッチCCを操作するクラッチ操作具19とを備える。
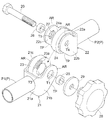
図1に示すように、パイプ部Pは、基端部E側に設けられる筒状の第1パイプP1(作業機本体側部分)、操作部M側に設けられる筒状の第2パイプP2(操作部側部分)、及び第1パイプP1と第2パイプP2とを折り曲げ自在に連結する支点20を備えて構成されている。
上記構成によって、第2パイプP2が、ボルト20の軸心回りに上下方向に折り曲げ可能に第1パイプP1に連結されると共に、ノブナット28を操作することによって、第2パイプP2の姿勢を変更可能に固定することができる。
図2に示すように、操縦ハンドルHは、ハウジング3の横側面に設けられているハンドル支持部Bにおいて支持されている。
操縦ハンドルHの旋回姿勢を図1に示す向きにセットした状態が標準状態であり、図1中の矢印Fの方向が前進方向となる。この標準状態は、特に何ら障害物OBのない平地における草刈作業に適しており、作業者は、作業機本体Aを前進又は後進させながら、通常の姿勢で草刈作業を実施することができる。
H 操縦ハンドル
M 操作部
P1 第1パイプ(作業機本体側部分)
P2 第2パイプ(操作部側部分)
20 ボルト(支点,固定手段)
21a 底壁(折り曲げ角度制限部)
21c 左側壁(折り曲げ角度制限部)
22a 底壁(折り曲げ角度制限部)
22b 右側壁(折り曲げ角度制限部)
23 回転板(固定手段)
24 回転板(固定手段)
28 ノブナット(固定手段)
Claims (2)
- 作業者が操作する操作部を有し且つ旋回操作及び上下角度変更操作可能に作業機本体に連結される操縦ハンドルを備える歩行型作業機であって、
前記操縦ハンドルが、上下方向に折り曲げ用の支点を長手方向の中間部分に備え、前記操縦ハンドルの操作部側部分を、前記操縦ハンドルが直線状となる非折り曲げ姿勢から、前記操縦ハンドルの作業機本体側部分の上方に折り畳むことができ、且つ、前記非折り曲げ姿勢から下方に折り曲げることができるように構成されており、
前記支点に前記操縦ハンドルの姿勢を変更可能に固定する固定手段を設けてある歩行型作業機。 - 前記支点が前記操縦ハンドルにおける上側に偏倚した位置に設けられており、前記操縦ハンドルにおける前記支点の下側の位置に、前記操縦ハンドルの操作部側部分の下側の折り曲げ角度を規定する折り曲げ角度制限部を設けてある請求項1に記載の歩行型作業機。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011126553A JP5666990B2 (ja) | 2011-06-06 | 2011-06-06 | 歩行型作業機 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011126553A JP5666990B2 (ja) | 2011-06-06 | 2011-06-06 | 歩行型作業機 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012249610A true JP2012249610A (ja) | 2012-12-20 |
| JP5666990B2 JP5666990B2 (ja) | 2015-02-12 |
Family
ID=47523081
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011126553A Active JP5666990B2 (ja) | 2011-06-06 | 2011-06-06 | 歩行型作業機 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5666990B2 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014207888A (ja) * | 2013-03-26 | 2014-11-06 | 独立行政法人農業・食品産業技術総合研究機構 | 歩行型草刈機 |
| JP2015181440A (ja) * | 2014-03-25 | 2015-10-22 | 国立研究開発法人農業・食品産業技術総合研究機構 | 歩行型草刈機 |
| JP2017175984A (ja) * | 2016-03-29 | 2017-10-05 | 国立研究開発法人農業・食品産業技術総合研究機構 | 歩行型草刈機 |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6005A (en) * | 1849-01-09 | Machine for hook-heading spikes by one motion | ||
| US8007A (en) * | 1851-04-01 | crosby | ||
| JPS5548307A (en) * | 1978-10-05 | 1980-04-07 | Matsushita Electric Works Ltd | Lawn mower with foldavle pushinnhandle |
| JPS59187904U (ja) * | 1983-05-31 | 1984-12-13 | 株式会社クボタ | 耕耘機 |
| JPS61204433U (ja) * | 1985-06-13 | 1986-12-23 | ||
| JPS6374416A (ja) * | 1986-09-19 | 1988-04-04 | 末瀬 三郎 | 刈払機の折畳み装置 |
| JPH03614U (ja) * | 1989-05-26 | 1991-01-08 | ||
| JP3150553B2 (ja) * | 1994-12-22 | 2001-03-26 | リョービ株式会社 | ハンドル折りたたみ機構を有する芝刈機 |
| JP2010246425A (ja) * | 2009-04-13 | 2010-11-04 | Kubota Corp | 歩行型草刈機 |
-
2011
- 2011-06-06 JP JP2011126553A patent/JP5666990B2/ja active Active
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6005A (en) * | 1849-01-09 | Machine for hook-heading spikes by one motion | ||
| US8007A (en) * | 1851-04-01 | crosby | ||
| JPS5548307A (en) * | 1978-10-05 | 1980-04-07 | Matsushita Electric Works Ltd | Lawn mower with foldavle pushinnhandle |
| JPS59187904U (ja) * | 1983-05-31 | 1984-12-13 | 株式会社クボタ | 耕耘機 |
| JPS61204433U (ja) * | 1985-06-13 | 1986-12-23 | ||
| JPS6374416A (ja) * | 1986-09-19 | 1988-04-04 | 末瀬 三郎 | 刈払機の折畳み装置 |
| JPH03614U (ja) * | 1989-05-26 | 1991-01-08 | ||
| JP3150553B2 (ja) * | 1994-12-22 | 2001-03-26 | リョービ株式会社 | ハンドル折りたたみ機構を有する芝刈機 |
| JP2010246425A (ja) * | 2009-04-13 | 2010-11-04 | Kubota Corp | 歩行型草刈機 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014207888A (ja) * | 2013-03-26 | 2014-11-06 | 独立行政法人農業・食品産業技術総合研究機構 | 歩行型草刈機 |
| JP2015181440A (ja) * | 2014-03-25 | 2015-10-22 | 国立研究開発法人農業・食品産業技術総合研究機構 | 歩行型草刈機 |
| JP2017175984A (ja) * | 2016-03-29 | 2017-10-05 | 国立研究開発法人農業・食品産業技術総合研究機構 | 歩行型草刈機 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5666990B2 (ja) | 2015-02-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5666990B2 (ja) | 歩行型作業機 | |
| JP6247101B2 (ja) | 歩行型草刈機 | |
| JP6247098B2 (ja) | 歩行型草刈機 | |
| JP6129086B2 (ja) | 歩行型作業機 | |
| JP6675734B2 (ja) | 歩行型草刈機 | |
| JP2011251572A (ja) | 作業機の伝動構造 | |
| JP4475926B2 (ja) | トラクタのpto軸駆動構造 | |
| JPH06296401A (ja) | 正逆転作業機 | |
| JP6723200B2 (ja) | 歩行型作業機 | |
| US7798242B2 (en) | Shift interlock mechanism | |
| JP5030155B2 (ja) | 作業車両 | |
| JP5038338B2 (ja) | 歩行型管理機 | |
| JP2012152141A (ja) | 歩行型作業機 | |
| JP2881532B2 (ja) | 作業機付き動力車両の変速装置 | |
| JP5991170B2 (ja) | 歩行型作業機 | |
| JP6132756B2 (ja) | 作業車 | |
| JP5706287B2 (ja) | 草刈機 | |
| JP3420353B2 (ja) | 同軸正逆転作業機 | |
| JP6238749B2 (ja) | 歩行型草刈機 | |
| JP5698014B2 (ja) | 歩行型作業機 | |
| JP3420358B2 (ja) | 正逆転作業機 | |
| JP2011115067A (ja) | 歩行型作業機 | |
| JP6523901B2 (ja) | 歩行型草刈機 | |
| JP4266205B2 (ja) | ロータリカバー | |
| JPH07194201A (ja) | 耕耘機 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130926 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140731 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140828 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20141017 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20141113 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20141211 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5666990 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |