JP2012256381A - 光ディスク装置 - Google Patents
光ディスク装置 Download PDFInfo
- Publication number
- JP2012256381A JP2012256381A JP2011127471A JP2011127471A JP2012256381A JP 2012256381 A JP2012256381 A JP 2012256381A JP 2011127471 A JP2011127471 A JP 2011127471A JP 2011127471 A JP2011127471 A JP 2011127471A JP 2012256381 A JP2012256381 A JP 2012256381A
- Authority
- JP
- Japan
- Prior art keywords
- error signal
- tracking error
- signal
- spherical aberration
- adjusting
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






Classifications
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B7/00—Recording or reproducing by optical means, e.g. recording using a thermal beam of optical radiation by modifying optical properties or the physical structure, reproducing using an optical beam at lower power by sensing optical properties; Record carriers therefor
- G11B7/08—Disposition or mounting of heads or light sources relatively to record carriers
- G11B7/09—Disposition or mounting of heads or light sources relatively to record carriers with provision for moving the light beam or focus plane for the purpose of maintaining alignment of the light beam relative to the record carrier during transducing operation, e.g. to compensate for surface irregularities of the latter or for track following
- G11B7/0941—Methods and circuits for servo gain or phase compensation during operation
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B7/00—Recording or reproducing by optical means, e.g. recording using a thermal beam of optical radiation by modifying optical properties or the physical structure, reproducing using an optical beam at lower power by sensing optical properties; Record carriers therefor
- G11B7/08—Disposition or mounting of heads or light sources relatively to record carriers
- G11B7/09—Disposition or mounting of heads or light sources relatively to record carriers with provision for moving the light beam or focus plane for the purpose of maintaining alignment of the light beam relative to the record carrier during transducing operation, e.g. to compensate for surface irregularities of the latter or for track following
- G11B7/0945—Methods for initialising servos, start-up sequences
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B7/00—Recording or reproducing by optical means, e.g. recording using a thermal beam of optical radiation by modifying optical properties or the physical structure, reproducing using an optical beam at lower power by sensing optical properties; Record carriers therefor
- G11B7/12—Heads, e.g. forming of the optical beam spot or modulation of the optical beam
- G11B7/135—Means for guiding the beam from the source to the record carrier or from the record carrier to the detector
- G11B7/1372—Lenses
- G11B7/1378—Separate aberration correction lenses; Cylindrical lenses to generate astigmatism; Beam expanders
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B7/00—Recording or reproducing by optical means, e.g. recording using a thermal beam of optical radiation by modifying optical properties or the physical structure, reproducing using an optical beam at lower power by sensing optical properties; Record carriers therefor
- G11B7/12—Heads, e.g. forming of the optical beam spot or modulation of the optical beam
- G11B7/135—Means for guiding the beam from the source to the record carrier or from the record carrier to the detector
- G11B7/1392—Means for controlling the beam wavefront, e.g. for correction of aberration
- G11B7/13925—Means for controlling the beam wavefront, e.g. for correction of aberration active, e.g. controlled by electrical or mechanical means
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B7/00—Recording or reproducing by optical means, e.g. recording using a thermal beam of optical radiation by modifying optical properties or the physical structure, reproducing using an optical beam at lower power by sensing optical properties; Record carriers therefor
- G11B7/24—Record carriers characterised by shape, structure or physical properties, or by the selection of the material
- G11B7/2403—Layers; Shape, structure or physical properties thereof
- G11B7/24035—Recording layers
- G11B7/24038—Multiple laminated recording layers
Landscapes
- Optical Head (AREA)
- Optical Recording Or Reproduction (AREA)
Abstract
【課題】起動時におけるRF信号を指標とする調整中及び調整後にトラッキングサーボ外れが発生することを防止することができる光ディスク装置を提供する。
【解決手段】トラッキング制御がON状態になる前に、球面収差補正用可動レンズの位置に応じてトラッキングエラー信号のバランス値を補正するための補正式を算出する。それから、トラッキング制御がON状態になった後に、前記補正式を用いてトラッキングエラー信号のバランス値を補正しながら、RF信号を指標として前記球面収差補正用可動レンズの位置を調整する。そして、前記球面収差補正用可動レンズの位置調整が終了した時点でのトラッキングエラー信号のバランス値を調整するための調整値を記憶する。
【選択図】図5
【解決手段】トラッキング制御がON状態になる前に、球面収差補正用可動レンズの位置に応じてトラッキングエラー信号のバランス値を補正するための補正式を算出する。それから、トラッキング制御がON状態になった後に、前記補正式を用いてトラッキングエラー信号のバランス値を補正しながら、RF信号を指標として前記球面収差補正用可動レンズの位置を調整する。そして、前記球面収差補正用可動レンズの位置調整が終了した時点でのトラッキングエラー信号のバランス値を調整するための調整値を記憶する。
【選択図】図5
Description
本発明は、光ディスク装置に関する。
従来の光ディスク装置では、起動時に以下のような手順で調整を実施している。
まずトラッキングエラー信号を指標にして球面収差補正の粗調整を行い、その後、トラッキングエラー信号の自動利得制御を行って、トラッキング制御を引き込む。さらにその後、RF信号を指標にして球面収差補正の精調整を行い、フォーカス制御のループゲイン調整と、トラッキング制御のループゲイン調整とを行い、起動を終了する。この起動の終了により、光ディスクの再生が可能となる。
ところが、トラッキング制御をON状態にした後に実行される球面収差補正の精調整において、光ピックアップの光学系中に配置される球面収差補正用可動レンズの位置変更に伴って、トラッキングエラー信号のバランス値が変動し、その変動が原因でトラッキングサーボが外れてしまい、調整が途中で続行不能になってしまう場合がある。
尚、特許文献1〜5では、球面収差の補正に関連する技術が開示されているが、球面収差を補正する際に、トラッキングエラー信号のバランス値が変動することによって生じるトラッキングサーボ外れが発生することを防止する技術は何ら開示も示唆もされていない。
本発明は、上記の状況に鑑み、起動時におけるRF信号を指標とする調整中及び調整後にトラッキングサーボ外れが発生することを防止することができる光ディスク装置を提供することを目的とする。
上記目的を達成するために本発明に係る光ディスク装置は、光ディスクに光を照射すると共に、前記光ディスクからの戻り光を光検出器で検出する光ピックアップと、前記光検出器から出力される電気信号を処理してトラッキングエラー信号を生成するトラッキングエラー信号生成手段と、前記光検出器から出力される電気信号に基づいてRF信号を生成するRF信号生成手段と、前記光ピックアップの光学系中に配置される球面収差補正用可動レンズの位置を調整制御する可動レンズ位置調整手段と、前記トラッキングエラー信号に基づいて前記光ピックアップのトラッキング制御を行うサーボ制御手段と、前記サーボ制御手段によるトラッキング制御がON状態になる前に、前記球面収差補正用可動レンズの位置に応じて前記トラッキングエラー信号のバランス値を補正するための補正式を算出する補正式算出手段と、前記サーボ制御手段によるトラッキング制御がON状態になった後に、前記補正式算出手段によって算出された補正式を用いて前記トラッキングエラー信号のバランス値を補正しながら、前記RF信号を指標として、前記可動レンズ位置調整手段を用いて前記球面収差補正用可動レンズの位置を調整する調整手段と、前記調整手段による前記球面収差補正用可動レンズの位置調整が終了した時点での前記トラッキングエラー信号のバランス値を調整するための調整値を記憶する記憶手段とを備える構成とする。
また、前記補正式が、前記球面収差補正用可動レンズの位置と前記トラッキングエラー信号のバランス値を調整するための調整値との関係式であるようにしてもよい。
さらに、前記補正式算出手段が、前記球面収差補正用可動レンズの少なくとも二つの互いに異なる位置で、前記トラッキングエラー信号のバランス値が最良となる前記トラッキングエラー信号のバランス値を調整するための調整値を検出し、その検出結果から前記補正式を算出するようにしてもよい。特に、前記補正式算出手段が、前記球面収差補正用可動レンズの二つの互いに異なる位置で、前記トラッキングエラー信号のバランス値が最良となる前記トラッキングエラー信号のバランス値を調整するための調整値を検出し、その検出結果から一次近似式を算出し、前記補正式に前記一次近似式を用いるようにすると、前記補正式の算出に要する時間を短くすることができる。
また、何らかの要因により調整手段での調整がうまくいかなったときにトラッキングエラー信号のバランス値を調整するための調整値に悪影響が及ぶおそれがあること等を考慮して、前記補正式において、前記トラッキングエラー信号のバランス値を調整するための調整値に上限値及び下限値を設定するようにしてもよい。
本発明に係る光ディスク装置によると、起動時におけるRF信号を指標とする調整中及び調整後にトラッキングサーボ外れが発生することを防止することができる。
本発明の実施形態について図面を参照して以下に説明する。本発明の一実施形態に係る光ディスク装置の概略構成を図1に示す。
本発明の一実施形態に係る光ディスク装置は、片面多層光ディスクに対応可能な光ディスク装置であって、光ピックアップ1と、RFアンプ31と、DSP(Digital Signal Processor)32と、再生処理回路33と、出力回路34と、CPU(Central Processing Unit)41と、ドライバ42と、表示部43と、操作部44と、送りモータ51と、スピンドルモータ52とを備えている。
光ピックアップ1は、光ディスク2に光ビームを照射して、光ディスク2に記録された音声情報、映像情報等の各種情報の読み取りを行う。この光ピックアップ1は、波長780nm帯の赤外レーザビーム(CD(Compact Disc)用レーザビーム)、波長650nm帯の赤色レーザビーム(DVD(Digital Versatile Disc)用レーザビーム)、及び波長405nm帯の青色レーザビーム(BD(Blu-ray Disc:登録商標)用レーザビーム)を光ディスク2に照射することができる。なお、光ピックアップ1内部の詳細については後述する。
光ピックアップ1により得られた音声情報、及び映像情報は、RFアンプ31、DSP32、再生処理回路33、及び出力回路34により音声及び映像に変換され、それぞれ不図示のスピーカ及びモニタから出力される。RFアンプ31は、光ピックアップ1からの音声信号や映像信号等を増幅する。DSP32及び再生処理回路33は、RFアンプ31からの信号に対して、再生のための各種情報処理(例えば映像処理等)を施す。出力回路34は、再生処理回路33からの信号を、不図示のスピーカ及びモニタに出力するためにD/A変換処理等を行う。
また、DSP32は、光検出器20(図2参照)から出力される信号をもとに演算処理を行い、フォーカスエラー信号、フォーカスサーボ信号、トラッキングエラー信号等を生成する。
CPU41は、操作部44からの情報を受け付けてDSP32に伝送すると共に、DSP32からの情報を表示部43に伝送する。
ドライバ42は、DSP32からの指示に基づいて、送りモータ51及びスピンドルモータ52の動作を制御する。送りモータ51は、光ピックアップ1を光ディスク2の径方向に移動させる。スピンドルモータ52は、光ディスク2を回転方向に駆動する。
また、ドライバ42は、DSP32からの指示に基づいて、ピックアップ装置1内のアクチュエータ21及びBEX(Beam Expander)モータ22(図2参照)の動作も制御する。
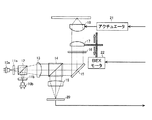
次に、本発明の一実施形態に係る光ディスク装置が備える光ピックアップ1の概略構成を図2に示す。
光ピックアップ1は、第一光源10aと、第二光源10bと、第一グレーティング11aと、第二グレーティング11bと、ダイクロプリズム12と、コリメートレンズ13と、ビームスプリッタ14と、立ち上げミラー15と、1/4波長板16と、コリメートレンズ17と、対物レンズ18と、検出レンズ19と、光検出器20と、アクチュエータ21と、BEXモータ22とを備えている。
第一光源10aは、波長780nm帯の赤外レーザビーム(CD用レーザビーム)と、波長650nm帯の赤色レーザビーム(DVD用レーザビーム)とを出射できる2波長一体型LDである。第二光源10bは、405nm帯の青色レーザビーム(BD用レーザビーム)を出射できるLDである。
第一グレーティング11aは、第一光源10aから出射されるレーザビームを回折し、回折光をダイクロプリズム12に出力する。第二グレーティング11bは、第二光源10bから出射されるレーザビームを回折し、回折光をダイクロプリズム12に出力する。
ダイクロプリズム12は、第一グレーティング11aから出力された回折光を透過し、第二グレーティング11bから出力された回折光を反射する。そして、第一グレーティング11a及び第二グレーティング11bから出射される回折光の光軸を一致させる。ダイクロプリズム12において透過又は反射された回折光(レーザビーム)は、コリメートレンズ13に送られる。
コレメータレンズ13は、ダイクロプリズム12から送られてくるレーザビームを平行光に変換する。コリメートレンズ13で平行光とされたレーザビームは、ビームスプリッタ14に送られる。
ビームスプリッタ14は、入射するレーザビームを分離する光分離素子として機能し、コリメートレンズ13から送られてきた光ビームを透過して、光ディスク2側へと導くとともに、光ディスク2で反射された反射光を反射して光検出器20側へと導く。ビームスプリッタ14を透過したレーザビームは、立ち上げミラー15に送られる。
立ち上げミラー15は、ビームスプリッタ14を透過してきた光ビームを反射して光ディスク2へと導く。立ち上げミラー15は、ビームスプリッタ14から送られてくるレーザビームの光軸に対して45°傾いた状態となっており、立ち上げミラー15で反射されたレーザビームの光軸は、光ディスク2の記録面と略直交する。
1/4波長板16は、直線偏光を円偏光に変換し、円偏光を直線偏光に変換する機能を有し、立ち上げミラー15が反射した直線偏光のレーザビームを円偏光に変換してコリメートレンズ17に送り、光ディスク2から反射される円偏光のレーザビームを直線偏光に変換して、立ち上げミラー15に送る。
コリメートレンズ17は、BEXモータ22によって光軸方向(図2の上下方向)に移動可能となっている。コリメートレンズ17の移動に応じて、コリメートレンズ17から出射されるレーザビームの状態を発散光としたり、収束光としたりすることができる。そして、このようにコリメートレンズ17から出射されるレーザビームの状態を変更することで、球面収差の補正を行うことができる。コリメートレンズ17から出射されるレーザビームは、対物レンズ18に送られる。
対物レンズ18は、コリメートレンズ17から送られてくるレーザビームを光ディスク2の記録面上に集光させる。また、対物レンズ18は後述するアクチュエータ21によって、例えば、図2の上下方向及び左右方向に移動可能とされており、フォーカスサーボ信号及びトラッキングサーボ信号に基づいてその位置が制御される。
光ディスク2で反射された反射光は、対物レンズ18、コリメートレンズ17、1/4波長板16の順に通過し、立ち上げミラー15で反射された後、更にビームスプリッタ14で反射されて、検出レンズ19によって光検出器20上に設けられる受光素子へと集光される。
光検出器20は、フォトダイオード等の受光素子を用いて受光した光情報を電気信号に変換して、DSP32(図1参照)に出力する。光検出器20は、図3に示すように、縦横に均等に四分割されたメイン受光領域A〜Dと、横に均等に二分割されたサブ受光領域E及びFと、横に均等に二分割されたサブ受光領域G及びHとを備えており、領域毎に個別に光電変換を行って電気信号を出力する。メイン受光領域A〜Dは0次回折光(メインビーム)を受光する領域であり、サブ受光領域E〜Hは1次回折光(サブビーム)を受光する領域である。DSP32は、領域Aの電気信号SAと領域Cの電気信号SCと加算したものから領域Bの電気信号SBと領域Dの電気信号SDと加算したものを引くことでフォーカスエラー信号を生成することができ、領域A〜Dの電気信号SA〜SDを加算することでフォーカスサム信号を生成することができる。また、DSP32はトラッキングエラー信号生成回路を有しており、当該トラッキングエラー信号生成回路は領域A〜Hの電気信号SA〜SHからトラッキングエラー信号を生成する。なお、トラッキングエラー信号生成回路の詳細については後述する。
アクチュエータ21は、ドライバ42(図1参照)で生成され出力された対物レンズ駆動信号に従って、対物レンズ18を光ディスク2の径方向に移動させる。
アクチュエータ21は、対物レンズ18を光ディスク2の記録面に沿う方向に移動させるトラッキング動作の他に、対物レンズ18から出射されるレーザビームの光軸が揺動するように対物レンズ18を傾動させるチルト動作や、対物レンズ18を光ディスク2に対して接近離反するように移動させるフォーカス動作も行うことができる。
次に、DSP32が有するトラッキングエラー信号生成回路の概略構成を図4に示す。図4に示すトラッキングエラー信号生成回路は、可変利得アンプ61〜68と、加算器69〜72と、メインバランス調整回路73と、サブバランス調整回路74と、メイン差動アンプ75と、サブ差動アンプ76と、アッテネータ77及び78と、合成差動アンプ79とを備えている。
加算器69は、可変利得アンプ61によって増幅された電気信号SAと、可変利得アンプ62によって増幅された電気信号SBとを加算する。加算器70は、可変利得アンプ63によって増幅された電気信号SCと、可変利得アンプ64によって増幅された電気信号SDとを加算する。メインバランス調整回路73は、加算器69から出力される信号に第1バランス係数を乗じ、加算器70から出力される信号に第2バランス係数を乗じる。第1バランス係数が乗じられた加算器69の出力信号はメイン差動アンプ75の非反転入力端子に供給され、第2バランス係数が乗じられた加算器70の出力信号はメイン差動アンプ75の反転入力端子に供給される。メイン差動アンプ75は、非反転入力端子及び反転入力端子に供給された信号からメインプッシュプル信号を生成してアッテネータ77に出力する。アッテネータ77はメインプッシュプル信号を減衰し、減衰後の信号を合成差動アンプ79の非反転入力端子に出力する。
加算器71は、可変利得アンプ65によって増幅された電気信号SEと、可変利得アンプ66によって増幅された電気信号SFとを加算する。加算器72は、可変利得アンプ67によって増幅された電気信号SGと、可変利得アンプ68によって増幅された電気信号SHとを加算する。サブバランス調整回路74は、加算器71から出力される信号に第3バランス係数を乗じ、加算器72から出力される信号に第4バランス係数を乗じる。第3バランス係数が乗じられた加算器71の出力信号はサブ差動アンプ76の非反転入力端子に供給され、第4バランス係数が乗じられた加算器72の出力信号はサブ差動アンプ76の反転入力端子に供給される。サブ差動アンプ76は、非反転入力端子及び反転入力端子に供給された信号からサブプッシュプル信号を生成してアッテネータ78に出力する。アッテネータ78はサブプッシュプル信号を減衰し、減衰後の信号を合成差動アンプ79の反転入力端子に出力する。
合成差動アンプ79は、アッテネータ77によって減衰されたメインプッシュプル信号と、アッテネータ78によって減衰されたサブプッシュプル信号からトラッキングエラー信号TEを生成する。トラッキングエラー信号TEの振幅バランスを示す指標であるトラッキングエラー信号TEのバランス値TBALは、DSP32(図1参照)によって算出される。そして、DSP32(図1参照)がメインバランス調整回路73及びサブバランス調整回路74を制御して、メインTBAL調整値(第1バランス係数の第2バランス係数に対する比)及びサブTBAL調整値(第3バランス係数の第4バランス係数に対する比)を変更することにより、トラッキングエラー信号TEのバランス値TBALの調整が可能である。
以上のように構成された本発明の一実施形態に係る光ディスク装置は、光ディスク2が装置内に挿入された場合に図5に示す起動動作を行う。
図5に示す起動動作が開始されると、まずスピンドルモータ52が光ディスク2を回転させ(ステップS10)、その後、DSP32がフォーカスサーチで光ディスクの記録層数を取得する(ステップS20)。
次に、装置の製造工程等で予め計測しているL0用設定値でBEXモータ22がコリメートレンズ17を移動させて球面収差補正を行い(ステップS30)、その後、DSP32は、フォーカスエラー信号の自動利得制御をON状態にし(ステップS40)、レーザ光が入射する側から最も遠い記録層L0にフォーカス制御を引き込んでフォーカス制御をON状態にする(ステップS50)。
それから、DSP32は、トラッキングエラー信号を指標にして球面収差補正の粗調整を行い(ステップS60)、その後、トラッキングエラー信号の自動利得制御をON状態する(ステップS70)。なお、トラッキングエラー信号の自動利得制御がON状態である場合、DSP32は、トラッキングエラー信号の振幅レベルが所定のレベルになるように、光検出器20から出力される電気信号SA〜SHの総和の変化に応じて、アッテネータ77及び78の減衰量を調整する。
ステップS70に続くステップS80において、DSP32は、トラッキングエラー信号TEのバランス値TBALを補正するための補正式を算出する。ここで、当該補正式の算出方法の一例について図6を参照して説明する。
ステップS80の開始時点において、コリメートレンズ17の位置は、球面収差補正の粗調整により基準位置からの移動量X0の位置に定まっているものとする。まず、基準位置からの移動量X0の位置から−10STEP離れた位置にコリメートレンズ17を移動させてから、トラッキングエラー信号TEのバランス値TBALが最良になるTBAL調整値Y−10STEP・BESTを検出する。次に、基準位置からの移動量X0の位置から+10STEP離れた位置にコリメートレンズ17を移動させてから、トラッキングエラー信号TEのバランス値TBALが最良になるTBAL調整Y+10STEP・BESTを検出する。最後に、上記の二つの検出点から、コリメートレンズ17の基準位置からの移動量Xとトラッキングエラー信号TEのバランス値TBALが最良になるTBAL調整値Yとの1次近似式Y=aX+bの定数a及びbを求め、「Y=aX+b(X−10STEP≦X≦X10STEPのとき) Y=Y−10STEP(X<X−10STEPのとき) Y=Y+10STEP(X−10STEP<Xのとき)」を上記補正式とする。メインTBAL調整値に関する上記補正式と、サブTBAL調整値に関する上記補正式をそれぞれ求め、各定数を例えばDSP32が内蔵しているメモリに記憶する。なお、上述した検出点に対応するSTEP数±10は一例であり、他の数値でも良い。また、1STEPの移動量も特に限定されない。また、上記の例では、二つの検出点から、コリメートレンズ17の基準位置からの移動量Xとトラッキングエラー信号TEのバランス値TBALが最良になるTBAL調整値Yとの1次近似式を求めたが、検出点を3つ以上にしてもよく、さらに近似式の次数を増加させてもよい。
ステップS80に続くステップS90において、トラッキング制御を引き込んでトラッキング制御をON状態にする。その後、DSP32は、RFアンプ31から出力されるRF信号を指標にして球面収差補正の精調整を行う(ステップS100)。球面収差補正の精調整しているとき、DSP32は、ステップS80で求めた補正式を用いて、コリメートレンズ17の位置変化に応じて、メインTBAL調整値及びサブTBAL調整値を変化させ、トラッキングエラー信号TEのバランス値TBALを補正する。
球面収差補正の精調整が終了すると、DSP32は、トラッキングエラー信号TEのバランス値TBALの補正における最終のメインTBAL調整値及びサブTBAL調整値を例えばDSP32が内蔵しているメモリに保存する(ステップS110)。その後、フォーカス制御のループゲイン調整と、トラッキング制御のループゲイン調整とを行う(ステップS120及びS130)。
さらにその後、DSP32は、次の記録層が有るか否か、すなわち上述した各種調整を行っていない記録層が有るか否かを判定する(ステップS140)。
次の記録層(直前に各種調整を行った記録層の次にレーザ光が入射する側から遠い記録層)が有れば(ステップS140のYES)、DSP32は、装置の製造工程等で予め計測している次の記録層用設定値でBEXモータ22がコリメートレンズ17を移動させて球面収差補正を行ってから、DSP32が次の記録層にフォーカスジャンプするようにドライバ42を介して光ピックアップ1を制御し(ステップS150)、その後、ステップS60に移行する。
一方、次の記録層がなければ(ステップS140のNO)、全記録層での調整が終了しているため、起動を終了する。なお、装置の製造工程等で予め計測している各記録層用設定値は、例えば、DSP32が内蔵している不揮発性メモリに予め記憶しておくとよい。
以上のような起動動作により、球面収差補正の精調整中及び球面収差補正の精調整後にトラッキングサーボ外れが発生することを防止することができる。
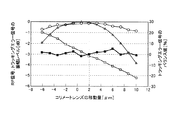
ここで、2010年6月に策定されたBDXL規格に準拠したBD−R_TL(3層追記型BD)を用い、コリメートレンズ17の基準位置からの移動量とRF信号及びトラッキングエラー信号の振幅レベルとの関係、及び、コリメートレンズ17の基準位置からの移動量とトラッキングエラー信号のバランス値との関係を測定した結果を図7に示す。なお、記録層L0での球面収差補正の粗調整が終了した時点でのコリメートレンズ17の基準位置からの移動量は2μmとする。
図7において、白丸のプロットによる特性線は記録層L0でのコリメートレンズ17の基準位置からの移動量とトラッキングエラー信号の振幅レベルとの関係を示すものであり、白三角のプロットによる特性線は記録層L0でのコリメートレンズ17の基準位置からの移動量とRF信号の振幅レベルとの関係を示すものであり、白四角のプロットによる特性線は図5のステップS80、ステップS100でのトラッキングエラー信号のバランス値補正、及びステップS100を実行しない場合、すなわち従来の光ディスク装置の場合における、球面収差補正の精調整中及び球面収差補正の精調整後の、記録層L0でのコリメートレンズ17の基準位置からの移動量とトラッキングエラー信号のバランス値との関係を示すものであり、黒四角のプロットによる特性線は図5のステップS80、ステップS100でのトラッキングエラー信号のバランス値補正、及びステップS100を実行した場合、すなわち本発明の一実施形態に係る光ディスク装置の場合における、球面収差補正の精調整中及び球面収差補正の精調整後の、記録層L0でのコリメートレンズ17の基準位置からの移動量とトラッキングエラー信号のバランス値との関係を示すものである。なお、白丸のプロットによる特性線及び白三角のプロットによる特性線においてRF信号又はトラッキングエラー信号の振幅レベルの最大値を0[dB]にしている。
従来の光ディスク装置では、球面収差補正の精調整中のコリメートレンズ17の移動量が大きいほど、トラッキングエラー信号のバランス値が0%から離れてしまうことが図7により確認できた。例えば、従来の光ディスク装置において、球面収差補正の精調整中、コリメートレンズ17の位置が記録層L0での球面収差補正の粗調整が終了した時点での位置である場合、トラッキングエラー信号は図8(b)に示すようになり、トラックサーボ外れのおそれがないが、球面収差補正の精調整中、コリメートレンズ17の位置が記録層L0での球面収差補正の粗調整が終了した時点での位置から−8STEP移動していた場合、トラッキングエラー信号は図8(a)に示すようになり、トラックサーボ外れのおそれがあり、球面収差補正の精調整中、コリメートレンズ17の位置が記録層L0での球面収差補正の粗調整が終了した時点での位置から+8STEP移動していた場合、トラッキングエラー信号は図8(c)に示すようになり、トラックサーボ外れのおそれがある。
これに対して、本発明の一実施形態に係る光ディスク装置では、球面収差補正の精調整中にコリメートレンズ17を移動させても、トラッキングエラー信号のバランス値を常に0%付近にできることが図7により確認できた。
なお、本実施形態では、起動時におけるトラッキングエラー信号を指標とする調整の代表例として、起動時における球面収差補正の粗調整を取りあげたが、本発明はこれに限定されることはない。すなわち、起動時における球面収差補正の粗調整以外の起動時におけるトラッキングエラー信号を指標とする調整を実施し、本発明を適用するようにしてもよい。
また、本実施形態では、前記光ピックアップの光学系中に配置される球面収差補正用可動レンズとしてコリメートレンズを用いたが、本発明はこれに限定されることはなく、例えば、球面収差補正用可動レンズがビームエキスパンダを構成する複数のレンズの一部であるような光ディスク装置等にも本発明を適用することができる。
1 光ピックアップ
2 光ディスク
10a 第一光源
10b 第二光源
11a 第一グレーティング
11b 第二グレーティング
12 ダイクロプリズム
13 コリメートレンズ
14 ビームスプリッタ
15 立ち上げミラー
16 1/4波長板
17 コリメートレンズ
18 対物レンズ
19 検出レンズ
20 光検出器
21 アクチュエータ
22 BEXモータ
31 RFアンプ
32 DSP
33 再生処理回路
34 出力回路
41 CPU
42 ドライバ
43 表示部
44 操作部
51 送りモータ
52 スピンドルモータ
61〜68 可変利得アンプ
69〜72 加算器
73 メインバランス調整回路
74 サブバランス調整回路
75 メイン差動アンプ
76 サブ差動アンプ
77、78 アッテネータ
79 合成差動アンプ
2 光ディスク
10a 第一光源
10b 第二光源
11a 第一グレーティング
11b 第二グレーティング
12 ダイクロプリズム
13 コリメートレンズ
14 ビームスプリッタ
15 立ち上げミラー
16 1/4波長板
17 コリメートレンズ
18 対物レンズ
19 検出レンズ
20 光検出器
21 アクチュエータ
22 BEXモータ
31 RFアンプ
32 DSP
33 再生処理回路
34 出力回路
41 CPU
42 ドライバ
43 表示部
44 操作部
51 送りモータ
52 スピンドルモータ
61〜68 可変利得アンプ
69〜72 加算器
73 メインバランス調整回路
74 サブバランス調整回路
75 メイン差動アンプ
76 サブ差動アンプ
77、78 アッテネータ
79 合成差動アンプ
Claims (5)
- 光ディスクに光を照射すると共に、前記光ディスクからの戻り光を光検出器で検出する光ピックアップと、
前記光検出器から出力される電気信号を処理してトラッキングエラー信号を生成するトラッキングエラー信号生成手段と、
前記光検出器から出力される電気信号に基づいてRF信号を生成するRF信号生成手段と、
前記光ピックアップの光学系中に配置される球面収差補正用可動レンズの位置を調整制御する可動レンズ位置調整手段と、
前記トラッキングエラー信号に基づいて前記光ピックアップのトラッキング制御を行うサーボ制御手段と、
前記サーボ制御手段によるトラッキング制御がON状態になる前に、前記球面収差補正用可動レンズの位置に応じて前記トラッキングエラー信号のバランス値を補正するための補正式を算出する補正式算出手段と、
前記サーボ制御手段によるトラッキング制御がON状態になった後に、前記補正式算出手段によって算出された補正式を用いて前記トラッキングエラー信号のバランス値を補正しながら、前記RF信号を指標として、前記可動レンズ位置調整手段を用いて前記球面収差補正用可動レンズの位置を調整する調整手段と、
前記調整手段による前記球面収差補正用可動レンズの位置調整が終了した時点での前記トラッキングエラー信号のバランス値を調整するための調整値を記憶する記憶手段とを備えることを特徴とする光ディスク装置。 - 前記補正式が、前記球面収差補正用可動レンズの位置と前記トラッキングエラー信号のバランス値を調整するための調整値との関係式である請求項1に記載の光ディスク装置。
- 前記補正式算出手段が、前記球面収差補正用可動レンズの少なくとも二つの互いに異なる位置で、前記トラッキングエラー信号のバランス値が最良となる前記トラッキングエラー信号のバランス値を調整するための調整値を検出し、その検出結果から前記補正式を算出する請求項2に記載の光ディスク装置。
- 前記補正式算出手段が、前記球面収差補正用可動レンズの二つの互いに異なる位置で、前記トラッキングエラー信号のバランス値が最良となる前記トラッキングエラー信号のバランス値を調整するための調整値を検出し、その検出結果から一次近似式を算出し、前記補正式に前記一次近似式を用いる請求項3に記載の光ディスク装置。
- 前記補正式において、前記トラッキングエラー信号のバランス値を調整するための調整値の上限値及び下限値が設定されている請求項2〜4のいずれか1項に記載の光ディスク装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011127471A JP2012256381A (ja) | 2011-06-07 | 2011-06-07 | 光ディスク装置 |
| US13/484,441 US8477575B2 (en) | 2011-06-07 | 2012-05-31 | Optical disc apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011127471A JP2012256381A (ja) | 2011-06-07 | 2011-06-07 | 光ディスク装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012256381A true JP2012256381A (ja) | 2012-12-27 |
Family
ID=47293118
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011127471A Pending JP2012256381A (ja) | 2011-06-07 | 2011-06-07 | 光ディスク装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US8477575B2 (ja) |
| JP (1) | JP2012256381A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014182842A (ja) * | 2013-03-18 | 2014-09-29 | Toshiba Alpine Automotive Technology Corp | 光ディスク装置 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000268377A (ja) * | 1999-03-18 | 2000-09-29 | Matsushita Electric Ind Co Ltd | トラッキング調整装置 |
| JP2007213643A (ja) * | 2006-02-07 | 2007-08-23 | Funai Electric Co Ltd | 光ディスク再生装置 |
| JP2008071456A (ja) * | 2006-09-15 | 2008-03-27 | Sony Corp | 光ディスク装置及びその制御方法 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004241100A (ja) | 2002-04-26 | 2004-08-26 | Matsushita Electric Ind Co Ltd | 光ディスク装置、ビームスポットの移動方法、および、光ディスク装置において実行可能なコンピュータプログラム |
| CN1277252C (zh) | 2002-04-26 | 2006-09-27 | 松下电器产业株式会社 | 光盘装置、光束点的移动方法、在光盘装置中执行的程序 |
| JP2005038472A (ja) | 2003-07-16 | 2005-02-10 | Sharp Corp | 球面収差補償機構を有する光記録媒体記録再生装置および球面収差補償方法 |
| JP2005251255A (ja) * | 2004-03-02 | 2005-09-15 | Canon Inc | 光学的情報記録再生装置 |
| JP4556117B2 (ja) | 2004-11-26 | 2010-10-06 | ソニー株式会社 | 光ピックアップの制御装置、光ピックアップの制御方法及びディスクドライブ装置 |
| JP4407623B2 (ja) | 2005-11-18 | 2010-02-03 | ソニー株式会社 | 再生装置、球面収差補正値及びフォーカスバイアス調整方法 |
| JP2008084417A (ja) | 2006-09-27 | 2008-04-10 | Funai Electric Co Ltd | 光ディスク装置 |
-
2011
- 2011-06-07 JP JP2011127471A patent/JP2012256381A/ja active Pending
-
2012
- 2012-05-31 US US13/484,441 patent/US8477575B2/en not_active Expired - Fee Related
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000268377A (ja) * | 1999-03-18 | 2000-09-29 | Matsushita Electric Ind Co Ltd | トラッキング調整装置 |
| JP2007213643A (ja) * | 2006-02-07 | 2007-08-23 | Funai Electric Co Ltd | 光ディスク再生装置 |
| JP2008071456A (ja) * | 2006-09-15 | 2008-03-27 | Sony Corp | 光ディスク装置及びその制御方法 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014182842A (ja) * | 2013-03-18 | 2014-09-29 | Toshiba Alpine Automotive Technology Corp | 光ディスク装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20120314551A1 (en) | 2012-12-13 |
| US8477575B2 (en) | 2013-07-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2011096329A (ja) | 光ピックアップ装置 | |
| WO2007099740A1 (ja) | 光ディスク装置および光ディスク判別方法 | |
| JP5311953B2 (ja) | 光ピックアップ装置 | |
| JP2012256381A (ja) | 光ディスク装置 | |
| JP2006134498A (ja) | 光学的情報記録再生装置 | |
| US8477574B2 (en) | Optical disk device | |
| JP2012256385A (ja) | 光ディスク装置 | |
| JP5423726B2 (ja) | 光ディスク装置 | |
| JP4622965B2 (ja) | 光ディスク再生装置 | |
| US9082429B2 (en) | Optical disc device and focus jump method | |
| JP2010287276A (ja) | 光ディスク装置 | |
| JP6288233B2 (ja) | 光ピックアップ装置および光ディスク装置 | |
| JP2012221541A (ja) | 光ディスク装置 | |
| JP5928154B2 (ja) | 光ディスク装置 | |
| JP5397395B2 (ja) | 光ディスク装置 | |
| US8730774B2 (en) | Optical disk device and optical disk device adjusting method | |
| JP6064760B2 (ja) | 光ピックアップ装置および光ディスク装置 | |
| US8406099B2 (en) | Optical disc apparatus, focus search method, and focus search program | |
| JP2006196121A (ja) | 光学的情報記録再生装置 | |
| JP2008103029A (ja) | 光ディスク再生装置、球面収差補正方法及び球面収差補正プログラム | |
| JP4442544B2 (ja) | 信号処理装置、記録媒体駆動装置及び信号処理方法 | |
| KR100917179B1 (ko) | 포커스 서보 제어 방법 및 이를 이용한 광 디스크 드라이브 | |
| JP2014154179A (ja) | 光ディスク装置 | |
| JP2012256382A (ja) | 光ディスク装置 | |
| US20130083643A1 (en) | Optical pickup apparatus |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130411 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130416 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20131015 |