JP2012506052A - 衝突直前状態を検出する確認センサを含むセンサシステム - Google Patents
衝突直前状態を検出する確認センサを含むセンサシステム Download PDFInfo
- Publication number
- JP2012506052A JP2012506052A JP2011532104A JP2011532104A JP2012506052A JP 2012506052 A JP2012506052 A JP 2012506052A JP 2011532104 A JP2011532104 A JP 2011532104A JP 2011532104 A JP2011532104 A JP 2011532104A JP 2012506052 A JP2012506052 A JP 2012506052A
- Authority
- JP
- Japan
- Prior art keywords
- radar
- sensor
- sensor system
- confirmation
- vehicle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000012790 confirmation Methods 0.000 title claims abstract description 50
- 238000001514 detection method Methods 0.000 claims abstract description 49
- 238000011156 evaluation Methods 0.000 claims abstract description 4
- 238000005259 measurement Methods 0.000 claims description 43
- 238000013459 approach Methods 0.000 claims description 24
- 238000012795 verification Methods 0.000 claims description 8
- 238000000034 method Methods 0.000 description 7
- 230000008569 process Effects 0.000 description 5
- 238000004891 communication Methods 0.000 description 4
- 230000008901 benefit Effects 0.000 description 3
- 238000010521 absorption reaction Methods 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 2
- 230000006378 damage Effects 0.000 description 2
- 238000006073 displacement reaction Methods 0.000 description 2
- 230000010354 integration Effects 0.000 description 2
- 230000001960 triggered effect Effects 0.000 description 2
- 208000027418 Wounds and injury Diseases 0.000 description 1
- 238000003491 array Methods 0.000 description 1
- 230000009286 beneficial effect Effects 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 239000003989 dielectric material Substances 0.000 description 1
- 230000007613 environmental effect Effects 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 230000010365 information processing Effects 0.000 description 1
- 208000014674 injury Diseases 0.000 description 1
- 230000003993 interaction Effects 0.000 description 1
- 230000002427 irreversible effect Effects 0.000 description 1
- 230000000116 mitigating effect Effects 0.000 description 1
- 230000010355 oscillation Effects 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 230000001737 promoting effect Effects 0.000 description 1
- 230000001681 protective effect Effects 0.000 description 1
- 238000002310 reflectometry Methods 0.000 description 1
- 230000008054 signal transmission Effects 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Images





Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
- B60R21/01—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents
- B60R21/013—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over
- B60R21/0134—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over responsive to imminent contact with an obstacle, e.g. using radar systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
- B60R21/01—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents
- B60R21/013—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/02—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to ambient conditions
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/06—Systems determining position data of a target
- G01S13/42—Simultaneous measurement of distance and other co-ordinates
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/87—Combinations of radar systems, e.g. primary radar and secondary radar
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
- B60R21/01—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents
- B60R2021/01013—Means for detecting collision, impending collision or roll-over
- B60R2021/01027—Safing sensors
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/06—Systems determining position data of a target
- G01S13/08—Systems for measuring distance only
- G01S13/10—Systems for measuring distance only using transmission of interrupted, pulse modulated waves
- G01S13/26—Systems for measuring distance only using transmission of interrupted, pulse modulated waves wherein the transmitted pulses use a frequency- or phase-modulated carrier wave
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/06—Systems determining position data of a target
- G01S13/08—Systems for measuring distance only
- G01S13/32—Systems for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated
- G01S13/325—Systems for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated using transmission of coded signals, e.g. P.S.K. signals
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/06—Systems determining position data of a target
- G01S13/08—Systems for measuring distance only
- G01S13/32—Systems for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated
- G01S13/34—Systems for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated using transmission of continuous, frequency-modulated waves while heterodyning the received signal, or a signal derived therefrom, with a locally-generated signal related to the contemporaneously transmitted signal
- G01S13/347—Systems for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated using transmission of continuous, frequency-modulated waves while heterodyning the received signal, or a signal derived therefrom, with a locally-generated signal related to the contemporaneously transmitted signal using more than one modulation frequency
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
- G01S2013/9327—Sensor installation details
- G01S2013/93274—Sensor installation details on the side of the vehicles
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/02—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S13/00
- G01S7/027—Constructional details of housings, e.g. form, type, material or ruggedness
Landscapes
- Engineering & Computer Science (AREA)
- Remote Sensing (AREA)
- Radar, Positioning & Navigation (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- Mechanical Engineering (AREA)
- Electromagnetism (AREA)
- Automation & Control Theory (AREA)
- Transportation (AREA)
- Mathematical Physics (AREA)
- Radar Systems Or Details Thereof (AREA)
- Air Bags (AREA)
- Traffic Control Systems (AREA)
Abstract
Description
Claims (13)
- 自動車の衝突直前状態を検出するセンサシステムにおいて、
第1の周波数を検出することにより、前記自動車に対する物体のレーダ距離測定値、角度位置、およびレーダ接近速度を含む複数のレーダ測定値に基づくレーダ出力を供給する、前記自動車に搭載された主レーダ装置と、
前記自動車に隣接する近場のスペース内にて第1の周波数より低い第2の周波数を検出する前記自動車に配置された確認センサを含み、近場のスペース内の前記物体の存在および該物体の近場の接近速度を含む複数の近場測定値に基づく確認検出出力を前記自動車に対し供給する確認検出装置と、
前記主レーダ装置および前記確認検出装置と通信して安全装置に対する展開信号を発生するように構成された電子制御装置であって、前記展開信号の発生および衝突直前状態の検出の信頼性を高めるために、前記レーダ出力を展開命令として使用し、前記確認検出出力を確認信号として使用し、前記レーダ出力および前記確認検出出力の評価に依存して前記展開信号を発生する電子制御装置と、
を含むことを特徴とするセンサシステム。 - 請求項1に記載のセンサシステムにおいて、前記展開命令が前記レーダ測定値に対応し、該レーダ測定値は、少なくとも毎秒約3メートルの前記レーダ接近速度と、前記レーダ距離測定値および該レーダ接近速度を用いて評価される約50ミリ秒よりも少ない衝突時間とを有することを特徴とするセンサシステム。
- 請求項2に記載のセンサシステムにおいて、前記確認信号が前記近場測定値に対応し、該近場測定値は、少なくとも毎秒約3メートルの前記近場の接近速度を有し、前記物体が前記近場のスペース内に存在することを指し示すことを特徴とするセンサシステム。
- 請求項1に記載のセンサシステムにおいて、前記確認センサが、前記近場のスペースの外周を規定する約3メートルまたはそれ以下の公称範囲を有することを特徴とするセンサシステム。
- 請求項1に記載のセンサシステムにおいて、前記主レーダ装置が、およそ20GHzから80GHzの間の周波数で動作し前記レーダ測定値を導出するレーダセンサを含み、前記確認センサが、およそ900MHzから26GHzの間の周波数で動作し前記近場測定値を導出することを特徴とするセンサシステム。
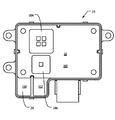
- 請求項1に記載のセンサシステムにおいて、前記確認センサが、少なくとも1つの近接アンテナに有効に接続する動作対象検出トランシーバと、前記少なくとも1つの近接アンテナを通じて検出信号を送受信する前記動作対象検出トランシーバを制御するように構成されて前記近場測定値を導出するマイクロプロセッサと、を含むことを特徴とするセンサシステム。
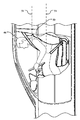
- 請求項6に記載のセンサシステムにおいて、前記主レーダ装置がレーダセンサを含み、該レーダセンサは、前記確認センサと協同的に前記自動車に配置され、これによって前記近場のスペースを通過して自動車の外側を検出することを特徴とするセンサシステム。
- 請求項6に記載のセンサシステムにおいて、前記レーダセンサが、少なくとも1つのレーダアンテナに有効に接続するレーダトランシーバと、少なくとも1つのレーダアンテナを通じてレーダ信号を送受信する前記レーダトランシーバを制御するように構成されて前記レーダ測定値を導出するレーダ信号マイクロプロセッサと、を含み、前記少なくとも1つのレーダアンテナおよび前記少なくとも1つの近接アンテナが同じ検出モジュールの一部であることを特徴とするセンサシステム。
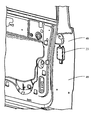
- 請求項8に記載のセンサシステムにおいて、前記検出モジュールが、前記自動車のドアに取り付けられることを特徴とするセンサシステム。
- 請求項1に記載のセンサシステムにおいて、前記安全装置が、エアバッグ、カーテンエアバッグ、自動車のドア内の火工装置、シートベルトプリテンショナおよびブレーキアクチュエータのうちの1つであることを特徴とするセンサシステム。
- 請求項1に記載のセンサシステムにおいて、前記レーダ測定値が、前記物体のレーダ断面積測定値をさらに含むことを特徴とするセンサシステム。
- 請求項1に記載のセンサシステムにおいて、前記電子制御装置が、自動車パラメータに基づいて前記展開信号を発生し、該自動車パラメータは、自動車速度およびヨーレートの値のうちの少なくとも1つを含むことを特徴とするセンサシステム。
- 請求項1に記載のセンサシステムにおいて、前記展開命令が前記レーダ測定値に対応し、該レーダ測定値は、少なくとも約1m2の前記レーダ断面積と、少なくとも毎秒約3メートルの前記レーダ接近速度と、前記レーダ距離測定値および該レーダ接近速度を用いて評価される約50ミリ秒よりも少ない衝突時間と、を有することを特徴とするセンサシステム。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US12/251,612 | 2008-10-15 | ||
| US12/251,612 US8095276B2 (en) | 2008-10-15 | 2008-10-15 | Sensor system including a confirmation sensor for detecting an impending collision |
| PCT/US2009/053844 WO2010044949A1 (en) | 2008-10-15 | 2009-08-14 | Sensor system including a confirmation sensor for detecting an impending collision |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012506052A true JP2012506052A (ja) | 2012-03-08 |
Family
ID=42099649
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011532104A Pending JP2012506052A (ja) | 2008-10-15 | 2009-08-14 | 衝突直前状態を検出する確認センサを含むセンサシステム |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US8095276B2 (ja) |
| EP (1) | EP2335235B1 (ja) |
| JP (1) | JP2012506052A (ja) |
| KR (1) | KR101679253B1 (ja) |
| CN (1) | CN102187376B (ja) |
| WO (1) | WO2010044949A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2022182342A (ja) * | 2021-05-28 | 2022-12-08 | 株式会社Subaru | 車両の乗員置去判定装置 |
Families Citing this family (37)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8588996B2 (en) * | 2005-11-09 | 2013-11-19 | Textron Innovations Inc. | Aircraft occupant protection system |
| JP4678611B2 (ja) * | 2008-06-05 | 2011-04-27 | トヨタ自動車株式会社 | 障害物検出装置および障害物検出システム |
| US9260192B2 (en) | 2009-07-27 | 2016-02-16 | Textron Innovations Inc. | Active vent and re-inflation system for a crash attentuation airbag |
| US20110291874A1 (en) * | 2010-06-01 | 2011-12-01 | De Mersseman Bernard | Vehicle radar system and method for detecting objects |
| IT1400834B1 (it) * | 2010-07-07 | 2013-07-02 | Aero Sekur S P A | Metodo e sistema per l'atterraggio di emergenza di un veicolo, come un elicottero o simili. |
| US8960593B2 (en) * | 2011-05-03 | 2015-02-24 | Raytheon Company | Horizon scanning system for a rotary wing aircraft including sensors housed within a tubercle on a rotor blade |
| DE102011077486B3 (de) * | 2011-06-14 | 2012-10-18 | Robert Bosch Gmbh | Vorrichtung und Verfahren zur Auslösung eines Insassenschutzmittels, Auslösesystem und Fahrzeug |
| WO2013042767A1 (ja) * | 2011-09-21 | 2013-03-28 | 本田技研工業株式会社 | 車両周辺監視装置 |
| KR101338062B1 (ko) * | 2011-11-15 | 2014-01-06 | 기아자동차주식회사 | 차량의 프리크래쉬 작동장치 및 작동방법 |
| DE102012202835A1 (de) * | 2012-02-24 | 2013-08-29 | Robert Bosch Gmbh | Verfahren und Vorrichtung zur Plausibilisierung einer vorausschauenden Sensorik |
| DE102012015250A1 (de) * | 2012-08-01 | 2014-02-06 | Audi Ag | Radarsensor für ein Kraftfahrzeug, Kraftfahrzeug und Kommunikationsverfahren |
| KR102015533B1 (ko) | 2012-09-07 | 2019-08-28 | 한국전자통신연구원 | 차량의 주변 정보 획득 장치 |
| JPWO2014064800A1 (ja) * | 2012-10-25 | 2016-09-05 | 三菱電機株式会社 | 車両接近報知音発生装置 |
| CN103786681B (zh) * | 2014-01-16 | 2016-04-06 | 江苏大学 | 校车用主动式儿童安全气囊装置及其控制方法 |
| CN104085391B (zh) * | 2014-06-28 | 2018-04-06 | 祖新华 | 汽车智能安全系统 |
| CN105313816B (zh) * | 2014-06-30 | 2018-12-21 | 天津市沃德美嘉科技有限公司 | 汽车驾驶员主动安全保护装置 |
| US10168425B2 (en) | 2014-07-03 | 2019-01-01 | GM Global Technology Operations LLC | Centralized vehicle radar methods and systems |
| GB201512713D0 (en) * | 2014-08-01 | 2015-08-26 | Ford Global Tech Llc | Electric bicycle |
| CN105578820A (zh) * | 2015-07-25 | 2016-05-11 | 宇龙计算机通信科技(深圳)有限公司 | 移动终端后盖及移动终端 |
| EP4471459A3 (en) * | 2015-12-17 | 2025-03-05 | Qualcomm Auto Ltd. | A vehicle radar system arranged for determining an unoccupied domain |
| EP3232222B1 (en) | 2016-04-12 | 2022-06-15 | Veoneer Sweden AB | A radar sensor unit with two housing parts |
| US10371794B2 (en) * | 2016-05-26 | 2019-08-06 | The Boeing Company | Unmanned aerial vehicle with deployable transmit/receive module apparatus with ramjet |
| DE102016009302A1 (de) * | 2016-08-01 | 2018-02-01 | Lucas Automotive Gmbh | Steuerungs-System und Steuerungs-Verfahren zur Auswahl und Verfolgung eines Kraftfahrzeugs |
| JP6813997B2 (ja) * | 2016-09-02 | 2021-01-13 | 株式会社ダイセル | エアバッグ装置を備えた小型飛行体 |
| GB2558273A (en) * | 2016-12-23 | 2018-07-11 | Hohla Martin | Sensor system for a vehicle and method for determining assessment threat |
| US10183641B2 (en) * | 2017-03-23 | 2019-01-22 | Baidu Usa Llc | Collision prediction and forward airbag deployment system for autonomous driving vehicles |
| JP6821043B2 (ja) * | 2017-09-15 | 2021-01-27 | 三菱電機株式会社 | 運転支援装置および運転支援方法 |
| JP6881177B2 (ja) * | 2017-09-15 | 2021-06-02 | 株式会社デンソー | レーダ装置 |
| US10754021B2 (en) * | 2017-10-04 | 2020-08-25 | Infineon Technologies Ag | System and method for controlling operation of a vehicle using a millimeter-wave radar sensor |
| US11142334B2 (en) * | 2017-12-19 | 2021-10-12 | Textron Innovations Inc. | Bird impact resistant protection system |
| DE102018204286A1 (de) * | 2018-03-21 | 2019-09-26 | Robert Bosch Gmbh | Sensoranordnung für ein Fahrzeug und Verfahren zur Überwachung eines Sensors |
| FR3085143B1 (fr) * | 2018-08-23 | 2020-07-17 | Continental Automotive France | Procede de detection d'approche d'un objet sur un cote lateral d'un vehicule en deplacement et dispositif de detection associe embarque |
| US12148229B2 (en) * | 2018-12-28 | 2024-11-19 | Gentex Corporation | System, device, and method for vehicle post-crash support |
| CN109987046A (zh) * | 2019-04-16 | 2019-07-09 | 南京理工大学 | 具有主动安全性的汽车开门防撞预警方法及装置 |
| JP2020179808A (ja) * | 2019-04-26 | 2020-11-05 | トヨタ自動車株式会社 | 車両制御装置 |
| KR102791607B1 (ko) * | 2020-01-14 | 2025-04-08 | 현대자동차주식회사 | 전방 충돌 감지 장치 |
| CN113479160B (zh) * | 2021-07-16 | 2023-01-31 | 东风柳州汽车有限公司 | 车辆乘员碰撞安全保护方法、装置、设备及存储介质 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07237521A (ja) * | 1994-03-02 | 1995-09-12 | Toyota Motor Corp | 車両用サイドエアバッグ制御装置 |
| JP2005121496A (ja) * | 2003-10-17 | 2005-05-12 | Toyota Motor Corp | 車輌の障害物検出レーダー装置 |
| JP2008518831A (ja) * | 2004-11-04 | 2008-06-05 | オートリブ エーエスピー,インコーポレイティド | レーダーセンサと視覚センサとを有するセンサシステム |
| JP2008532000A (ja) * | 2005-02-25 | 2008-08-14 | ローベルト ボッシュ ゲゼルシャフト ミット ベシュレンクテル ハフツング | 自動車用レーダーシステム |
Family Cites Families (35)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE4407757A1 (de) | 1993-03-08 | 1994-09-15 | Mazda Motor | Vorrichtung zur Erfassung von Hindernissen für ein Fahrzeug |
| US6749218B2 (en) | 1994-05-23 | 2004-06-15 | Automotive Technologies International, Inc. | Externally deployed airbag system |
| DE19546506A1 (de) | 1995-12-13 | 1997-06-19 | Daimler Benz Ag | Fahrzeug-Navigationssystem und Signalverarbeitungsverfahren für ein solches Navigationssystem |
| US6025796A (en) | 1996-12-09 | 2000-02-15 | Crosby, Ii; Robert G. | Radar detector for pre-impact airbag triggering |
| JP3676616B2 (ja) | 1999-04-28 | 2005-07-27 | 本田技研工業株式会社 | 障害物検出装置 |
| EP1206710A1 (en) * | 1999-08-06 | 2002-05-22 | Roadrisk Technologies, Llc | Method and apparatus for stationary object detection |
| JP4308381B2 (ja) | 1999-09-29 | 2009-08-05 | 富士通テン株式会社 | 周辺監視センサ |
| DE19961799B4 (de) | 1999-12-21 | 2004-03-25 | Breed Automotive Technology, Inc., Lakeland | Passives Sicherheitssystem eines Kraftfahrzeugs |
| US20010031068A1 (en) | 2000-04-14 | 2001-10-18 | Akihiro Ohta | Target detection system using radar and image processing |
| US6944543B2 (en) | 2001-09-21 | 2005-09-13 | Ford Global Technologies Llc | Integrated collision prediction and safety systems control for improved vehicle safety |
| US20030076981A1 (en) | 2001-10-18 | 2003-04-24 | Smith Gregory Hugh | Method for operating a pre-crash sensing system in a vehicle having a counter-measure system |
| US6720880B2 (en) | 2001-11-13 | 2004-04-13 | Koninklijke Philips Electronics N.V. | Vision-based method and apparatus for automatically activating a child safety feature |
| US6639543B2 (en) * | 2002-01-09 | 2003-10-28 | Tyco Electronics Corp. | Sensor front-end for vehicle closing velocity sensor |
| JP3531640B2 (ja) | 2002-01-10 | 2004-05-31 | 日産自動車株式会社 | 車両用運転操作補助装置 |
| US6519519B1 (en) | 2002-02-01 | 2003-02-11 | Ford Global Technologies, Inc. | Passive countermeasure methods |
| US6721659B2 (en) | 2002-02-01 | 2004-04-13 | Ford Global Technologies, Llc | Collision warning and safety countermeasure system |
| US6950014B2 (en) | 2002-02-13 | 2005-09-27 | Ford Global Technologies Llc | Method for operating a pre-crash sensing system in a vehicle having external airbags |
| JP4019736B2 (ja) | 2002-02-26 | 2007-12-12 | トヨタ自動車株式会社 | 車両用障害物検出装置 |
| DE10208332A1 (de) | 2002-02-27 | 2003-09-04 | Bosch Gmbh Robert | Pulsradarvorrichtung und Verfahren zum Erfassen, zum Detektieren und/oder zum Auswerten von mindestens einem Objekt |
| US6862537B2 (en) | 2002-03-21 | 2005-03-01 | Ford Global Technologies Llc | Sensor fusion system architecture |
| US6728617B2 (en) | 2002-07-23 | 2004-04-27 | Ford Global Technologies, Llc | Method for determining a danger zone for a pre-crash sensing system in a vehicle having a countermeasure system |
| JP2004117071A (ja) | 2002-09-24 | 2004-04-15 | Fuji Heavy Ind Ltd | 車外監視装置、及び、この車外監視装置を備えた走行制御装置 |
| JP3862015B2 (ja) | 2002-10-25 | 2006-12-27 | オムロン株式会社 | 車載用レーダ装置 |
| US7130730B2 (en) | 2002-10-25 | 2006-10-31 | Ford Global Technologies Llc | Sensing strategy for damage mitigation in compatability situations |
| JP3849650B2 (ja) * | 2003-01-28 | 2006-11-22 | トヨタ自動車株式会社 | 車両 |
| JP3779280B2 (ja) | 2003-03-28 | 2006-05-24 | 富士通株式会社 | 衝突予測装置 |
| KR100513523B1 (ko) * | 2003-05-29 | 2005-09-07 | 현대자동차주식회사 | 차간 거리 제어장치 |
| DE10326563A1 (de) * | 2003-06-12 | 2004-12-30 | Robert Bosch Gmbh | Vorrichtung zur Ansteuerung von Rückhaltemitteln |
| US6958683B2 (en) | 2003-10-02 | 2005-10-25 | Ford Motor Company | Multipurpose vision sensor system |
| JP4449409B2 (ja) | 2003-10-27 | 2010-04-14 | 日産自動車株式会社 | 車両用乗員保護装置 |
| US7409295B2 (en) * | 2004-08-09 | 2008-08-05 | M/A-Com, Inc. | Imminent-collision detection system and process |
| US20060091653A1 (en) | 2004-11-04 | 2006-05-04 | Autoliv Asp, Inc. | System for sensing impending collision and adjusting deployment of safety device |
| JP4598653B2 (ja) | 2005-05-13 | 2010-12-15 | 本田技研工業株式会社 | 衝突予知装置 |
| JP4684954B2 (ja) | 2005-08-31 | 2011-05-18 | 本田技研工業株式会社 | 車両の走行安全装置 |
| CN100495070C (zh) * | 2006-09-30 | 2009-06-03 | 中国海洋大学 | 微波测风激光雷达装置 |
-
2008
- 2008-10-15 US US12/251,612 patent/US8095276B2/en active Active
-
2009
- 2009-08-14 KR KR1020117006704A patent/KR101679253B1/ko active Active
- 2009-08-14 CN CN200980140957.3A patent/CN102187376B/zh not_active Expired - Fee Related
- 2009-08-14 JP JP2011532104A patent/JP2012506052A/ja active Pending
- 2009-08-14 EP EP09820954.7A patent/EP2335235B1/en active Active
- 2009-08-14 WO PCT/US2009/053844 patent/WO2010044949A1/en not_active Ceased
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07237521A (ja) * | 1994-03-02 | 1995-09-12 | Toyota Motor Corp | 車両用サイドエアバッグ制御装置 |
| JP2005121496A (ja) * | 2003-10-17 | 2005-05-12 | Toyota Motor Corp | 車輌の障害物検出レーダー装置 |
| JP2008518831A (ja) * | 2004-11-04 | 2008-06-05 | オートリブ エーエスピー,インコーポレイティド | レーダーセンサと視覚センサとを有するセンサシステム |
| JP2008532000A (ja) * | 2005-02-25 | 2008-08-14 | ローベルト ボッシュ ゲゼルシャフト ミット ベシュレンクテル ハフツング | 自動車用レーダーシステム |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2022182342A (ja) * | 2021-05-28 | 2022-12-08 | 株式会社Subaru | 車両の乗員置去判定装置 |
| US12379478B2 (en) | 2021-05-28 | 2025-08-05 | Subaru Corporation | System for detecting occupant being left in vehicle |
| JP7751403B2 (ja) | 2021-05-28 | 2025-10-08 | 株式会社Subaru | 車両の乗員置去判定装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN102187376A (zh) | 2011-09-14 |
| WO2010044949A1 (en) | 2010-04-22 |
| US8095276B2 (en) | 2012-01-10 |
| US20100094508A1 (en) | 2010-04-15 |
| EP2335235B1 (en) | 2014-03-19 |
| KR101679253B1 (ko) | 2016-11-24 |
| CN102187376B (zh) | 2015-02-04 |
| KR20110084497A (ko) | 2011-07-25 |
| EP2335235A1 (en) | 2011-06-22 |
| EP2335235A4 (en) | 2013-03-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2012506052A (ja) | 衝突直前状態を検出する確認センサを含むセンサシステム | |
| US6869101B2 (en) | Airbag with bag mounted sensor | |
| US6980097B2 (en) | Method and device for activating passenger protection device | |
| US6099030A (en) | Occupant protection system | |
| EP1073568B1 (en) | Occupant detection system | |
| CN102085842B (zh) | 机动车辆和操作机动车辆的乘员安全系统的方法 | |
| EP1073569B1 (en) | Occupant detection system | |
| US6516258B1 (en) | Method for determining control data for deploying restraint elements in a vehicle prior to a collision | |
| US20060091654A1 (en) | Sensor system with radar sensor and vision sensor | |
| JP2008518830A (ja) | 切迫する衝突を感知して安全装置の展開を調節するためのシステム | |
| US7243013B2 (en) | Vehicle radar-based side impact assessment method | |
| US20100225522A1 (en) | Sensor system for detecting an impending collision of a vehicle | |
| CN103204121A (zh) | 基于雷达的多功能安全系统 | |
| US9262923B2 (en) | Blind spot detection system | |
| KR20010042900A (ko) | 탑승자 검출 시스템 | |
| JP2003535748A (ja) | 乗員検出システム | |
| EP1996433B1 (en) | Occupant classification system | |
| CN100366468C (zh) | 控制防前冲回拉装置的装置 | |
| US20050187685A1 (en) | Occupant restraint system | |
| JP3003484B2 (ja) | 車両衝突検知装置 | |
| US20040232671A1 (en) | Apparatus for controlling airbag inflation |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110420 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110420 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120810 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121002 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20121227 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20130109 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20130201 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20130208 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20130227 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20130306 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20130903 |