JP2013146122A - 駆動装置、圧電モーターの駆動方法、電子部品搬送装置、電子部品検査装置、ロボットハンド、及びロボット - Google Patents
駆動装置、圧電モーターの駆動方法、電子部品搬送装置、電子部品検査装置、ロボットハンド、及びロボット Download PDFInfo
- Publication number
- JP2013146122A JP2013146122A JP2012004816A JP2012004816A JP2013146122A JP 2013146122 A JP2013146122 A JP 2013146122A JP 2012004816 A JP2012004816 A JP 2012004816A JP 2012004816 A JP2012004816 A JP 2012004816A JP 2013146122 A JP2013146122 A JP 2013146122A
- Authority
- JP
- Japan
- Prior art keywords
- vibration
- unit
- driven
- state
- driving
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000007689 inspection Methods 0.000 title claims abstract description 43
- 238000000034 method Methods 0.000 title claims abstract description 24
- 238000005452 bending Methods 0.000 claims abstract description 100
- 238000001514 detection method Methods 0.000 claims description 35
- 230000033001 locomotion Effects 0.000 claims description 26
- 230000007704 transition Effects 0.000 claims description 8
- 238000007562 laser obscuration time method Methods 0.000 claims description 2
- 230000007246 mechanism Effects 0.000 description 27
- 238000010586 diagram Methods 0.000 description 19
- 238000003384 imaging method Methods 0.000 description 9
- 230000007423 decrease Effects 0.000 description 8
- 239000000463 material Substances 0.000 description 8
- 230000003247 decreasing effect Effects 0.000 description 7
- 230000008569 process Effects 0.000 description 7
- 230000004048 modification Effects 0.000 description 4
- 238000012986 modification Methods 0.000 description 4
- 230000008859 change Effects 0.000 description 3
- 239000000758 substrate Substances 0.000 description 3
- 239000003990 capacitor Substances 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 229910052451 lead zirconate titanate Inorganic materials 0.000 description 2
- 229910044991 metal oxide Inorganic materials 0.000 description 2
- 150000004706 metal oxides Chemical class 0.000 description 2
- 239000004065 semiconductor Substances 0.000 description 2
- 229910013641 LiNbO 3 Inorganic materials 0.000 description 1
- 230000001133 acceleration Effects 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 230000003321 amplification Effects 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000036760 body temperature Effects 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 239000000470 constituent Substances 0.000 description 1
- 239000013078 crystal Substances 0.000 description 1
- 230000005284 excitation Effects 0.000 description 1
- 230000001747 exhibiting effect Effects 0.000 description 1
- 229910052737 gold Inorganic materials 0.000 description 1
- 238000005286 illumination Methods 0.000 description 1
- 230000001678 irradiating effect Effects 0.000 description 1
- HFGPZNIAWCZYJU-UHFFFAOYSA-N lead zirconate titanate Chemical compound [O-2].[O-2].[O-2].[O-2].[O-2].[Ti+4].[Zr+4].[Pb+2] HFGPZNIAWCZYJU-UHFFFAOYSA-N 0.000 description 1
- GQYHUHYESMUTHG-UHFFFAOYSA-N lithium niobate Chemical compound [Li+].[O-][Nb](=O)=O GQYHUHYESMUTHG-UHFFFAOYSA-N 0.000 description 1
- 230000014759 maintenance of location Effects 0.000 description 1
- 229910052751 metal Inorganic materials 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 229910052759 nickel Inorganic materials 0.000 description 1
- 238000003199 nucleic acid amplification method Methods 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 230000000149 penetrating effect Effects 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 239000000523 sample Substances 0.000 description 1
- 229910052726 zirconium Inorganic materials 0.000 description 1
Images









Landscapes
- General Electrical Machinery Utilizing Piezoelectricity, Electrostriction Or Magnetostriction (AREA)
Abstract
【解決手段】駆動装置100は、可動部60と、縦振動及び屈曲振動を発生する振動部1と振動部1の屈曲振動により駆動される被駆動部5とを有し、振動部1が被駆動部5を駆動することにより可動部60を移動させる圧電モーター10と、振動部1に駆動信号を供給する駆動信号供給部30と、を備え、振動部1に駆動信号を供給しない非駆動状態から、振動部1に縦振動を発生させる教示モードに移行することが可能であることを特徴とする。
【選択図】図1
Description
<駆動装置>
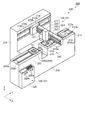
図を参照して、第1の実施形態に係る駆動装置の概略構成を説明する。図1は、第1の実施形態に係る駆動装置の概略構成を示す模式図である。
まず、第1の実施形態に係る圧電モーター10の構成を説明する。図2は、第1の実施形態に係る圧電モーターの構成及び動作を示す模式図である。詳しくは、図2(a)は圧電モーターの平面図であり、図2(b)は通常駆動モードにおける圧電モーターの振動部の振動挙動を説明する図であり、図2(c)は教示モードにおける圧電モーターの振動部の振動挙動を説明する図である。図3は、圧電モーターの駆動電圧と回転数及び保持力との関係を模式的に示す図である。
続いて、図4及び図5を参照して、駆動信号供給部30の構成を説明する。図4は、第1の実施形態に係る駆動信号供給部の概略構成を示すブロック図である。図5は、第1の実施形態に係る駆動信号供給部の要部を示すブロック図である。
続いて、図6を参照して、第1の実施形態に係る駆動装置100において教示作業を行う場合の圧電モーターの駆動方法を説明する。図6は、教示作業における圧電モーターの駆動方法を示すフローチャートである。上述の通り、教示作業を行う際は、圧電モーター10の振動部1に縦振動を発生させて教示モードとする。
<駆動装置>
次に、第2の実施形態に係る駆動装置の概略構成を説明する。第2の実施形態に係る駆動装置は、第1の実施形態に対して、圧電モーターの振動部の電極が5つの電極部に分割されている点が異なっているが、その他の構成はほぼ同じである。第1の実施形態と共通する構成要素については、同一の符号を付しその説明を省略する。
図8(a)に示すように、第2の実施形態に係る圧電モーター10Aは、振動部2と、被駆動部5と、保持部材8と、付勢バネ6と、基台7と、を備えている。
<電子部品搬送装置及び電子部品検査装置>
次に、第3の実施形態に係る電子部品搬送装置及び電子部品検査装置を説明する。第3の実施形態に係る電子部品搬送装置及び電子部品検査装置は、第1の実施形態又は第2の実施形態に係る駆動装置を備えている。以下では、第1の実施形態に係る駆動装置における構成要素の符号を付して説明し、第2の実施形態に係る駆動装置における構成要素の符号は省略する。
<ロボット>
次に、第4の実施形態に係るロボットを説明する。第4の実施形態に係るロボットは、ロボットハンドを有し、ロボット及びロボットハンドの指部及び腕部の駆動装置として、第1の実施形態に係る駆動装置100、又は第2の実施形態に係る駆動装置101を備えている。以下では、第1の実施形態に係る駆動装置における構成要素の符号を付して説明し、第2の実施形態に係る駆動装置における構成要素の符号は省略する。
上述した第1の実施形態及び第2の実施形態では、駆動装置100,101が、力センサー50及びエンコーダー11の双方で外力を検知し、ステップS1及びステップS2とステップS3及びステップS4とで、段階的に保持力を低下させる構成であったが、これに限定されるものではない。
また、上述した実施形態では、教示モードは駆動装置の教示作業を目的とするものであったが、これに限定されるものではない。例えば、教示モードを、操作者等の人が誤って装置に接触してしまった場合でも、その人に危害が与えられることを抑止する安全モードとして利用してもよい。
上述した実施形態では、駆動信号供給部30にデジタルアンプ34を用いていたが、これに限定されるものではなく、駆動信号供給部30にアナログアンプを用いた構成としてもよい。駆動信号供給部30にアナログアンプを用いる場合、PWM部33及び整合回路40は削除される。
Claims (11)
- 可動部と、
縦振動及び屈曲振動を発生する振動部と前記振動部の前記屈曲振動により駆動される被駆動部とを有し、前記振動部が前記被駆動部を駆動することにより前記可動部を移動させる圧電モーターと、
前記振動部に駆動信号を供給する駆動信号供給部と、を備え、
前記振動部に前記駆動信号を供給しない非駆動状態から、前記振動部に前記縦振動を発生させる第1の状態に移行することが可能であることを特徴とする駆動装置。 - 請求項1に記載の駆動装置であって、
前記駆動信号供給部は、前記第1の状態において前記振動部に第1の電圧値の前記駆動信号を供給し、
前記第1の電圧値は、前記振動部に前記屈曲振動を発生させる第2の状態において前記被駆動部が駆動され移動を開始する前記駆動信号の電圧値である第2の電圧値よりも低いことを特徴とする駆動装置。 - 請求項1又は2に記載の駆動装置であって、
前記可動部に加えられた外力を検知する第1の検知部を備え、
前記非駆動状態において前記第1の検知部が前記可動部に加えられた外力を検知した場合に、前記第1の状態に移行することを特徴とする駆動装置。 - 請求項1又は2に記載の駆動装置であって、
前記被駆動部に加えられた外力を検知する第2の検知部を備え、
前記第1の状態において前記第2の検知部が前記被駆動部に加えられた外力を検知した場合に、前記駆動信号の電圧値を前記第1の状態に移行したときの電圧値よりも高くすることを特徴とする駆動装置。 - 請求項1又は2に記載の駆動装置であって、
前記可動部に加えられた外力を検知する第1の検知部と、
前記被駆動部に加えられた外力を検知する第2の検知部と、を備え、
前記非駆動状態において前記第1の検知部が前記可動部に加えられた外力を検知した場合に前記第1の状態に移行し、
前記第1の状態において前記第2の検知部が前記被駆動部に加えられた外力を検知した場合に、前記駆動信号の電圧値を前記第1の状態に移行したときの電圧値よりも高くすることを特徴とする駆動装置。 - 請求項3から5のいずれか一項に記載の駆動装置であって、
前記非駆動状態において前記可動部に加えられた外力を検知することで前記第1の状態に移行する場合と、
前記第1の状態において前記被駆動部に加えられた外力を検知することで前記駆動信号の電圧値を前記第1の状態に移行したときの電圧値よりも高くする場合と、
前記非駆動状態において前記可動部に加えられた外力を検知することで前記第1の状態に移行し、かつ、前記第1の状態において前記被駆動部に加えられた外力を検知することで前記駆動信号の電圧値を前記第1の状態に移行したときの電圧値よりも高くする場合と、
前記可動部に加えられた外力及び前記被駆動部に加えられた外力を検知しない場合と、
のいずれかに切り替える切り替え部を備えることを特徴とする駆動装置。 - 可動部と、
縦振動及び屈曲振動を発生する振動部と前記振動部の前記屈曲振動により駆動される被駆動部とを有し、前記振動部が前記被駆動部を駆動することにより前記可動部を移動させる圧電モーターと、
前記振動部に駆動信号を供給する駆動信号供給部と、
前記可動部に加えられた外力を検知する第1の検知部と、を備えた圧電モーターの駆動方法であって、
前記振動部に前記駆動信号を供給しない非駆動状態において前記第1の検知部が前記可動部に加えられた外力を検知した場合に、前記振動部に前記縦振動を発生させる第1の状態に移行することを特徴とする圧電モーターの駆動方法。 - 電子部品を所定の位置に移動させる電子部品搬送装置であって、
前記電子部品を保持して移動可能な可動部と、
縦振動及び屈曲振動を発生する振動部と前記振動部の前記屈曲振動により駆動される被駆動部とを有し、前記振動部が前記被駆動部を駆動することにより前記可動部を移動させる圧電モーターと、
前記振動部に駆動信号を供給する駆動信号供給部と、を備え、
前記振動部に前記駆動信号を供給しない非駆動状態から、前記振動部に前記縦振動を発生させる第1の状態に移行することが可能であることを特徴とする電子部品搬送装置。 - 電子部品を所定の位置に移動配置させて、前記電子部品の電気的検査を行う電子部品検査装置であって、
前記電子部品を検査する検査部と、
前記電子部品を保持して移動可能な可動部と、
縦振動及び屈曲振動を発生する振動部と前記振動部の前記屈曲振動により駆動される被駆動部とを有し、前記振動部が前記被駆動部を駆動することにより前記可動部を移動させる圧電モーターと、
前記振動部に駆動信号を供給する駆動信号供給部と、を備え、
前記振動部に前記駆動信号を供給しない非駆動状態から、前記振動部に前記縦振動を発生させる第1の状態に移行することが可能であることを特徴とする電子部品検査装置。 - 可動部と、
縦振動及び屈曲振動を発生する振動部と前記振動部の前記屈曲振動により駆動される被駆動部とを有し、前記振動部が前記被駆動部を駆動することにより前記可動部を移動させる圧電モーターと、
前記振動部に駆動信号を供給する駆動信号供給部と、を備え、
前記振動部に前記駆動信号を供給しない非駆動状態から、前記振動部に前記縦振動を発生させる第1の状態に移行することが可能であることを特徴とするロボットハンド。 - 可動部と、
縦振動及び屈曲振動を発生する振動部と前記振動部の前記屈曲振動により駆動される被駆動部とを有し、前記振動部が前記被駆動部を駆動することにより前記可動部を移動させる圧電モーターと、
前記振動部に駆動信号を供給する駆動信号供給部と、を備え、
前記振動部に前記駆動信号を供給しない非駆動状態から、前記振動部に前記縦振動を発生させる第1の状態に移行することが可能であることを特徴とするロボット。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012004816A JP5948879B2 (ja) | 2012-01-13 | 2012-01-13 | 駆動装置、圧電モーターの駆動方法、電子部品搬送装置、電子部品検査装置、ロボットハンド、及びロボット |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012004816A JP5948879B2 (ja) | 2012-01-13 | 2012-01-13 | 駆動装置、圧電モーターの駆動方法、電子部品搬送装置、電子部品検査装置、ロボットハンド、及びロボット |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2013146122A true JP2013146122A (ja) | 2013-07-25 |
| JP5948879B2 JP5948879B2 (ja) | 2016-07-06 |
Family
ID=49041648
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012004816A Active JP5948879B2 (ja) | 2012-01-13 | 2012-01-13 | 駆動装置、圧電モーターの駆動方法、電子部品搬送装置、電子部品検査装置、ロボットハンド、及びロボット |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5948879B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10044295B2 (en) | 2014-04-30 | 2018-08-07 | Seiko Epson Corporation | Piezoelectric actuator and robot |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11271480A (ja) * | 1998-03-19 | 1999-10-08 | Seiko Instruments Inc | 超音波モータを利用したステージ及びこのステージを用いた電子機器、印刷装置 |
| JP2005037167A (ja) * | 2003-07-16 | 2005-02-10 | Seiko Epson Corp | 浮動調芯装置、浮動調芯装置を有する部品搬送装置および部品検査装置 |
| JP2005081538A (ja) * | 2003-09-11 | 2005-03-31 | Seiko Epson Corp | マニピュレータおよびこれを備えた装置 |
| JP2005316394A (ja) * | 2004-04-02 | 2005-11-10 | Olympus Imaging Corp | 移動装置および光学部材移動装置 |
| JP2006033912A (ja) * | 2004-07-12 | 2006-02-02 | Seiko Epson Corp | 圧電アクチュエータおよび機器 |
| JP2008172853A (ja) * | 2007-01-05 | 2008-07-24 | Olympus Corp | 定在波型超音波アクチュエータの駆動方法およびその駆動装置 |
| JP2010062204A (ja) * | 2008-09-01 | 2010-03-18 | Juki Corp | 電子部品実装装置の自動焦点調整方法 |
| JP2010104235A (ja) * | 2010-02-12 | 2010-05-06 | Seiko Epson Corp | 圧電アクチュエータ |
| JP2011076020A (ja) * | 2009-10-02 | 2011-04-14 | Canon Inc | 撮影レンズ |
| JP2011160633A (ja) * | 2010-02-03 | 2011-08-18 | Seiko Epson Corp | 圧電モーターの制御装置、圧電モーターの制御方法、圧電モーター装置及び印刷装置 |
-
2012
- 2012-01-13 JP JP2012004816A patent/JP5948879B2/ja active Active
Patent Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11271480A (ja) * | 1998-03-19 | 1999-10-08 | Seiko Instruments Inc | 超音波モータを利用したステージ及びこのステージを用いた電子機器、印刷装置 |
| JP2005037167A (ja) * | 2003-07-16 | 2005-02-10 | Seiko Epson Corp | 浮動調芯装置、浮動調芯装置を有する部品搬送装置および部品検査装置 |
| JP2005081538A (ja) * | 2003-09-11 | 2005-03-31 | Seiko Epson Corp | マニピュレータおよびこれを備えた装置 |
| JP2005316394A (ja) * | 2004-04-02 | 2005-11-10 | Olympus Imaging Corp | 移動装置および光学部材移動装置 |
| JP2006033912A (ja) * | 2004-07-12 | 2006-02-02 | Seiko Epson Corp | 圧電アクチュエータおよび機器 |
| JP2008172853A (ja) * | 2007-01-05 | 2008-07-24 | Olympus Corp | 定在波型超音波アクチュエータの駆動方法およびその駆動装置 |
| JP2010062204A (ja) * | 2008-09-01 | 2010-03-18 | Juki Corp | 電子部品実装装置の自動焦点調整方法 |
| JP2011076020A (ja) * | 2009-10-02 | 2011-04-14 | Canon Inc | 撮影レンズ |
| JP2011160633A (ja) * | 2010-02-03 | 2011-08-18 | Seiko Epson Corp | 圧電モーターの制御装置、圧電モーターの制御方法、圧電モーター装置及び印刷装置 |
| JP2010104235A (ja) * | 2010-02-12 | 2010-05-06 | Seiko Epson Corp | 圧電アクチュエータ |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10044295B2 (en) | 2014-04-30 | 2018-08-07 | Seiko Epson Corporation | Piezoelectric actuator and robot |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5948879B2 (ja) | 2016-07-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5903858B2 (ja) | 電子部品搬送装置及び電子部品検査装置 | |
| US20130140951A1 (en) | Piezoelectric motor, drive unit, robot hand, robot, electronic component transporting apparatus, electronic component inspecting apparatus, and printer | |
| JP6232752B2 (ja) | 駆動装置、電子部品搬送装置、および電子部品検査装置 | |
| US20130140954A1 (en) | Actuator, robot hand, robot, electronic component carrying device, electronic component inspection device, and printer | |
| US9496482B2 (en) | Actuator, robot hand, robot, electric component conveying apparatus, electronic component testing apparatus, and printer | |
| TWI611655B (zh) | 驅動裝置、驅動電路、機器手臂、機器人、電子零件搬送裝置、電子零件檢查裝置 | |
| JP6044074B2 (ja) | 駆動装置、圧電モーターの駆動方法、電子部品搬送装置、電子部品検査装置、ロボットハンド、及びロボット | |
| JP5948879B2 (ja) | 駆動装置、圧電モーターの駆動方法、電子部品搬送装置、電子部品検査装置、ロボットハンド、及びロボット | |
| CN111490699B (zh) | 压电驱动装置、机器人及打印机的控制方法 | |
| JP2014079135A (ja) | 圧電アクチュエーター、ロボットハンド、ロボット、電子部品搬送装置、電子部品検査装置、送液ポンプ、印刷装置、電子時計、投影装置、搬送装置 | |
| CN109309458B (zh) | 压电驱动装置及其驱动方法、机器人、电子部件输送装置 | |
| JP2018186679A (ja) | 振動アクチュエーターの制御装置、振動アクチュエーターの制御方法、ロボット、電子部品搬送装置、プリンター、プロジェクターおよび振動デバイス | |
| JP5903859B2 (ja) | 電子部品搬送装置及び電子部品検査装置 | |
| JP5179918B2 (ja) | 超音波モータ装置 | |
| JP4672828B2 (ja) | 超音波モータ、及び超音波モータ付電子機器 | |
| JP2014007917A (ja) | 圧電アクチュエーターの駆動方法、圧電アクチュエーター、ロボットハンド、ロボット、搬送装置、電子部品搬送装置および電子部品検査装置 | |
| JP2013121196A (ja) | 圧電モーターの駆動装置、圧電モーターの駆動方法、電子部品搬送装置、電子部品検査装置、ロボットハンド、及びロボット | |
| US11203040B2 (en) | Piezoelectric driving device, driving method of piezoelectric driving device, and robot | |
| JP2013121195A (ja) | 圧電モーターの駆動装置、圧電モーターの駆動方法、電子部品搬送装置、電子部品検査装置、ロボットハンド、及びロボット | |
| JP5179913B2 (ja) | 超音波モータ装置 | |
| JP2004274837A (ja) | 超音波モータの駆動方法および駆動装置 | |
| JP5411196B2 (ja) | 圧電デバイス及びそれを用いた電子機器 | |
| JP4745615B2 (ja) | 圧電デバイス及びそれを用いた電子機器 | |
| JPH07319543A (ja) | 精密位置決め装置 | |
| CN114465522A (zh) | 压电驱动装置的控制方法及机械手的控制方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20141119 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20150107 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20150909 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20151006 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20151201 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160510 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160523 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5948879 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |