JP2013187931A - モータ制御装置 - Google Patents
モータ制御装置 Download PDFInfo
- Publication number
- JP2013187931A JP2013187931A JP2012048823A JP2012048823A JP2013187931A JP 2013187931 A JP2013187931 A JP 2013187931A JP 2012048823 A JP2012048823 A JP 2012048823A JP 2012048823 A JP2012048823 A JP 2012048823A JP 2013187931 A JP2013187931 A JP 2013187931A
- Authority
- JP
- Japan
- Prior art keywords
- axis
- command
- voltage
- current
- axis current
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images



Landscapes
- Control Of Ac Motors In General (AREA)
Abstract
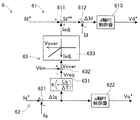
【解決手段】三相電流検出手段と、角速度検出手段と、三相電流をd軸電流Idおよびq軸電流Iqに変換する変換部と、指令トルクを指令d軸電流Id*および指令q軸電流Iq*に変換する演算部と、指令d軸電圧Vd*および指令q軸電圧Vq*を演算する電圧ベクトル演算部6と、指令電圧変換部と、電力変換手段と、を備えるモータ制御装置であって、電圧ベクトル演算部6は、指令q軸電流Iq*からq軸電流Iqを減算したq軸電流偏差ΔIqを補償するために必要とされる所要電圧Vreqを演算し、所要電圧Vreqが所定の制限電圧Vlimを超過したときに指令d軸電流Id*を負側に増加させるように制御する(負値の調整量Iadjを加算する)弱め磁束制御部63を含む。
【選択図】図2
Description

Vq=ωLd・Id+R・Iq+pLq・Iq+ωΨ
ここで、定常状態から指令トルクTq*が増加した直後を考えると、右辺第1項の(ωLd・Id)はd軸電流が概ねゼロであるので無視できる。右辺第2項の(R・Iq)は、大きな指令トルクTq*に対応する大きなq軸電流Iqを巻線抵抗R成分に抗して流すのに必要とされる所要電圧を意味する。また、右辺第3項の(pLq・Iq)は、大きなq軸電流Iqをq軸インダクタンスLq成分に抗して流すのに必要とされる所要電圧を意味する。さらに、右辺第4項の(ωΨ)は、磁石の磁束Ψによって発生する電機子反作用に抗するために必要とされる電圧である。
Vreq=Lq×ΔIq/ΔT
この式は、インダクタンスLの電圧vと電流iの関係を示す次の一般式に一致している。
v=L×di/dt
2v、2w:電流検出手段
3:角速度検出手段 31:角度センサ 32:角速度変換部
4:検出電流変換部
5:電流指令演算部
6:電圧ベクトル演算部
61:d軸演算部 611:加算器 612:加算器
613:d軸比例積分制御器 62:q軸演算部 621:加算器
622:q軸比例積分制御器 63:弱め磁束制御部 631:乗算器
632:加算器 633:調整量制御器
7:指令電圧変換部
8:電力変換手段
9:三相同期モータ
6X:従来技術の電圧ベクトル演算部 65:d軸演算部 66:q軸演算部
Tq*:指令トルク Id*:指令d軸電流 Iq*:指令q軸電流
Vd*:指令d軸電圧 Vq*:指令q軸電圧
Vu、Vv、Vw:三相電圧 Iv、Iw:V相およびW相電流
θ:回転位相 ω:角速度
Id:d軸電流 Id**:調整d軸指令電流 ΔId:d軸電流偏差
Iq:q軸電流 ΔIq:q軸電流偏差
Vlim:制限電圧 Vreq:所要電圧 Vover:超過分
Iadj:調整量
Claims (4)
- 回転子に磁石を有し固定子に電機子巻線を有する三相同期モータの前記電機子巻線に流れる三相電流を検出する電流検出手段と、
前記回転子が回転する角速度を検出する角速度検出手段と、
検出した三相電流を、前記回転子の磁石の回転位置を基準とするdq座標軸上のd軸電流およびq軸電流に変換する検出電流変換部と、
外部からの指令トルクまたは指令電流を前記dq座標軸上の指令d軸電流および指令q軸電流に変換する電流指令演算部と、
前記d軸電流、前記q軸電流、前記指令d軸電流、および前記指令q軸電流に基づいて、前記dq座標軸上の指令d軸電圧および指令q軸電圧で表される指令電圧を演算する電圧ベクトル演算部と、
前記指令d軸電圧および前記指令q軸電圧を三相電圧に変換する指令電圧変換部と、
前記三相電圧を生成して前記電機子巻線に印加する電力変換手段と、を備えるモータ制御装置であって、
前記電圧ベクトル演算部は、前記指令q軸電流から前記q軸電流を減算したq軸電流偏差を補償するために必要とされる所要電圧を演算し、前記所要電圧が所定の制限電圧を超過したときに前記指令d軸電流を負側に増加させるように制御する弱め磁束制御部を含むモータ制御装置。 - 請求項1において、前記弱め磁束制御部は、前記q軸電流偏差にq軸インダクタンスを乗算し制御サイクルタイムで除算して前記所要電圧を演算するモータ制御装置。
- 請求項1または2において、前記弱め磁束制御部は、前記所要電圧が前記制限電圧を超過した超過分に対応して、前記指令d軸電流を負側に増加させる調整量を決定するモータ制御装置。
- 請求項1において、前記電圧ベクトル演算部は、
前記q軸指令電流から前記q軸電流を減算してq軸電流偏差を求め、前記q軸電流偏差に基づいた比例積分制御により前記指令q軸電圧を演算するq軸演算部と、
前記q軸電流偏差にq軸インダクタンスを乗算し制御サイクルタイムで除算して前記所要電圧を演算し、前記所要電圧が前記制限電圧を超過した超過分に対応して、前記指令d軸電流を負側に増加させる調整量を決定する弱め磁束制御部と、
前記d軸指令電流に前記調整量を考慮した後に前記d軸電流を減算してd軸電流偏差を求め、前記d軸電流偏差に基づいた比例積分制御により前記指令d軸電圧を演算するd軸演算部と、を有するモータ制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012048823A JP2013187931A (ja) | 2012-03-06 | 2012-03-06 | モータ制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012048823A JP2013187931A (ja) | 2012-03-06 | 2012-03-06 | モータ制御装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2013187931A true JP2013187931A (ja) | 2013-09-19 |
Family
ID=49388951
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012048823A Pending JP2013187931A (ja) | 2012-03-06 | 2012-03-06 | モータ制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2013187931A (ja) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104728090A (zh) * | 2013-12-18 | 2015-06-24 | 海尔集团公司 | 一种空调变频压缩机全频域恒力矩控制系统及方法 |
| CN104917438A (zh) * | 2015-06-09 | 2015-09-16 | 同济大学 | 一种基于改进过调制提升交流电机转矩输出能力的方法 |
| JP2018098843A (ja) * | 2016-12-09 | 2018-06-21 | 株式会社明電舎 | インバータ制御装置 |
| CN109804550A (zh) * | 2016-10-25 | 2019-05-24 | 密克罗奇普技术公司 | 用于永磁同步电机的闭环磁通减弱 |
| CN112928781A (zh) * | 2021-03-23 | 2021-06-08 | 南方电网科学研究院有限责任公司 | 双馈风机暂态稳定控制方法、系统、计算机设备和介质 |
| CN116848776A (zh) * | 2021-02-24 | 2023-10-03 | 日立安斯泰莫株式会社 | 电机驱动装置和电动车辆系统 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003040128A (ja) * | 2001-07-30 | 2003-02-13 | Mitsubishi Electric Corp | ステアリング制御装置 |
| US20040217729A1 (en) * | 2003-04-30 | 2004-11-04 | Visteon Global Technologies, Inc. | Electric power assist steering system and method of operation |
| JP2010057223A (ja) * | 2008-08-26 | 2010-03-11 | Mitsubishi Electric Corp | 制御装置およびモータ制御装置 |
-
2012
- 2012-03-06 JP JP2012048823A patent/JP2013187931A/ja active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003040128A (ja) * | 2001-07-30 | 2003-02-13 | Mitsubishi Electric Corp | ステアリング制御装置 |
| US20040217729A1 (en) * | 2003-04-30 | 2004-11-04 | Visteon Global Technologies, Inc. | Electric power assist steering system and method of operation |
| JP2010057223A (ja) * | 2008-08-26 | 2010-03-11 | Mitsubishi Electric Corp | 制御装置およびモータ制御装置 |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104728090A (zh) * | 2013-12-18 | 2015-06-24 | 海尔集团公司 | 一种空调变频压缩机全频域恒力矩控制系统及方法 |
| CN104917438A (zh) * | 2015-06-09 | 2015-09-16 | 同济大学 | 一种基于改进过调制提升交流电机转矩输出能力的方法 |
| CN109804550A (zh) * | 2016-10-25 | 2019-05-24 | 密克罗奇普技术公司 | 用于永磁同步电机的闭环磁通减弱 |
| JP2018098843A (ja) * | 2016-12-09 | 2018-06-21 | 株式会社明電舎 | インバータ制御装置 |
| CN116848776A (zh) * | 2021-02-24 | 2023-10-03 | 日立安斯泰莫株式会社 | 电机驱动装置和电动车辆系统 |
| CN112928781A (zh) * | 2021-03-23 | 2021-06-08 | 南方电网科学研究院有限责任公司 | 双馈风机暂态稳定控制方法、系统、计算机设备和介质 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5964391B2 (ja) | dq三相座標の電流位相を制御するモータ制御装置 | |
| CN103026615B (zh) | 交流旋转机的控制装置 | |
| JP5948613B2 (ja) | モータの制御装置 | |
| CN109874396B (zh) | 逆变器控制装置以及电动机驱动系统 | |
| JP5281339B2 (ja) | 同期電動機の駆動システム、及びこれに用いる制御装置 | |
| JP5870591B2 (ja) | 同期電動機の制御装置及び制御方法 | |
| JP2009136085A (ja) | 交流モータの制御装置 | |
| JP5717808B2 (ja) | 同期電動機の電流制御装置 | |
| JP5332904B2 (ja) | 交流電動機のセンサレス制御装置 | |
| JP2010200430A (ja) | 電動機の駆動制御装置 | |
| CN104779872B (zh) | 同步电动机的控制装置及控制方法 | |
| JP2013187931A (ja) | モータ制御装置 | |
| CN103378792B (zh) | 永磁型同步电机的控制装置 | |
| JP6396869B2 (ja) | モータ制御装置 | |
| JP2015035885A (ja) | モータ制御装置 | |
| JP6358834B2 (ja) | ベクトル制御装置、それを組み込んだインバータ及びそれを組み込んだインバータとモータとのセット装置 | |
| JP5284895B2 (ja) | 巻線界磁式同期機の制御装置 | |
| JP6848406B2 (ja) | インバータ制御装置 | |
| JP2013183558A (ja) | モータ制御装置 | |
| JP2009284598A (ja) | 交流電動機の制御装置 | |
| JP2018520624A (ja) | モーター駆動装置とその方法、及びモーター | |
| JP2013188074A (ja) | 誘導モータの制御装置および制御方法 | |
| JP2018160959A (ja) | 回転機制御装置 | |
| JP2010200544A (ja) | 交流電動機制御装置および制御方法 | |
| JP2007282300A (ja) | モーター制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150210 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20151118 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20151124 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160125 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20160621 |