JP2014006178A - 運転訓練シミュレータ - Google Patents
運転訓練シミュレータ Download PDFInfo
- Publication number
- JP2014006178A JP2014006178A JP2012142787A JP2012142787A JP2014006178A JP 2014006178 A JP2014006178 A JP 2014006178A JP 2012142787 A JP2012142787 A JP 2012142787A JP 2012142787 A JP2012142787 A JP 2012142787A JP 2014006178 A JP2014006178 A JP 2014006178A
- Authority
- JP
- Japan
- Prior art keywords
- plant
- calculation unit
- model calculation
- simulation
- severe
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images


Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02E—REDUCTION OF GREENHOUSE GAS [GHG] EMISSIONS, RELATED TO ENERGY GENERATION, TRANSMISSION OR DISTRIBUTION
- Y02E30/00—Energy generation of nuclear origin
- Y02E30/30—Nuclear fission reactors
Landscapes
- Monitoring And Testing Of Nuclear Reactors (AREA)
- Testing And Monitoring For Control Systems (AREA)
- User Interface Of Digital Computer (AREA)
Abstract
【解決手段】プラントモデルシステム機器モデル計算部113は、原子カプラント全体のパラメータを計算する。過酷事故対応主要プラントモデル計算部105は、過酷事故に対して原子力プラントの主要パラメータのみを計算する。表示制御部111は、プラントモデルシステム機器モデル計算部113や過酷事故対応主要プラントモデル計算部105によるシミュレーション結果の表示を制御する。シミュレーション同期制御部114は、プラントモデルシステム機器モデル計算部113と過酷事故対応主要プラントモデル計算部105の計算を同期させる。
【選択図】図1
Description
かかる構成により、タイムステップ管理方法(積分方法)が異なる複数のシミュレーションプログラムを組み合わせてシミュレーションさせる場合でも、異常終了することなく、高速でシミュレーションを実行可能となる。
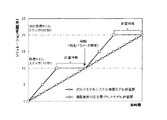
図1は、本発明の一実施形態による運転訓練シミュレータの構成を示すブロック図である。図2は、本発明の一実施形態による運転訓練シミュレータの動作を示すフローチャートである。図3は、本発明の一実施形態による運転訓練シミュレータの動作を示すタイムチャートである。
このように、タイムステップ管理方法(積分方法)が異なる複数のシミュレーションプログラムを、タイムステップの間の適切な間隔で同期制御することで、タイプステップ(あるいはパラメータの時刻)のズレ(差)を抑制するとともに、タイムステップの間の適切な間隔で相互のパラメータ授受を行うことで、モデル間のパラメータのミスマッチを小さくして、プラントパラメータ計算が異常終了しないようにすることが可能である。ここで、同期制御や相互のパラメータ授受を行うタイムステップの間の適切な間隔は、計算速度が遅い方のシミュレーションプログラムのシミュレーション速度を基準に行うので、高速でシミュレーションを実行可能となる。
102…シミュレーション実行操作部
103…シミュレーション実行制御部
105…過酷事故対応主要プラントモデル計算部
111…表示制御部
112…監視・操作部
113…プラントモデルシステム機器モデル計算部
114…シミュレーション同期制御部
115…モデルパラメータ通信制御部
201…訓練シナリオデータ
202…実行指令
203…目標タイムステップ
206…状態表示データ
207…機器操作信号
215…プラントモデルシステム機器モデル計算部タイムステップ計算状況信号
216…過酷事故対応主要プラントモデル計算部タイムステップ計算状況信号
217…プラントモデルシステム機器モデル計算実行/待機指令
218…過酷事故対応主要プラントモデル計算実行/待機指令
205,219,220,221,222…プラントパラメータデータ
Claims (8)
- 原子力プラントの運転訓練シミュレータのシナリオを設定する訓練シナリオ設定部と、
シミュレーションの実行を操作するシミュレーション実行操作部と、
シミュレーションの実行を制御するシミュレーション実行制御部と、
原子カプラント全体のパラメータを計算するプラントモデルシステム機器モデル計算部と、
過酷事故に対して原子力プラントの主要パラメータのみを計算する過酷事故対応主要プラントモデル計算部と、
前記プラントモデルシステム機器モデル計算部や前記過酷事故対応主要プラントモデル計算部によるシミュレーション結果の表示を制御する表示制御部と、
前記シミュレーション結果を表示し運転操作を模擬する操作・監視部と、
前記プラントモデルシステム機器モデル計算部と前記過酷事故対応主要プラントモデル計算部の計算を同期させるシミュレーション同期制御部を備えることを特徴とする運転訓練シミュレータ。 - 請求項1記載の運転訓練シミュレータにおいて、
前記プラントモデルシステム機器モデル計算部と前記過酷事故対応主要プラントモデル計算部の相互のパラメータ授受を制御するモデルパラメータ通信制御部を備えることを特徴とする運転訓練シミュレータ。 - 請求項2記載の運転訓練シミュレータにおいて、
前記シミュレーション同期制御部は、前記シミュレーション実行制御部から目標タイムステップと、前記プラントモデルシステム機器モデル計算部からプラントモデルシステム機器モデル計算部タイムステップ計算状況信号と、前記過酷事故対応主要プラントモデル計算部から過酷事故対応主要プラントモデル計算部タイムステップ計算状況信号とを受けて、前記プラントモデルシステム機器モデル計算部と前記過酷事故対応主要プラントモデル計算部のタイムステップ計算状況を監視することを特徴とする運転訓練シミュレータ。 - 請求項3記載の運転訓練シミュレータにおいて、
前記シミュレーション同期制御部は、前記プラントモデルシステム機器モデル計算部と前記過酷事故対応主要プラントモデル計算部とのタイムステップを同期させるように、プラントモデルシステム機器モデル計算実行/待機指令を前記プラントモデルシステム機器モデル計算部に出力し、過酷事故対応主要プラントモデル計算実行/待機指令を前記過酷事故対応主要プラントモデル計算部に出力することを特徴とする運転訓練シミュレータ。 - 請求項4記載の運転訓練シミュレータにおいて、
前記プラントモデルシステム機器モデル計算部は、原子カプラントの炉心が健全な場合には全体のプラントパラメータを模擬し、事象が過酷事故に進展した場合には、前記過酷事故対応主要プラントモデル計算部で計算された主要プラントパラメータを元に周辺のプラントパラメータを計算することを特徴とする運転訓練シミュレータ。 - 請求項5記載の運転訓練シミュレータにおいて、
前記プラントモデルシステム機器モデル計算部は、前記訓練シナリオ設定部からの異常事象設定などの訓練シナリオデータを受け、また、前記監視・操作部から機器操作信号を受けて、訓練シナリオや運転操作をプラント挙動計算に反映して、前記シミュレーション実行制御部から受けた前記目標タイムステップのシミュレーション時刻までプラント挙動を計算し、プラントパラメータを前記モデルパラメータ通信制御部に出力することを特徴とする運転訓練シミュレータ。 - 請求項6記載の運転訓練シミュレータにおいて、
前記過酷事故対応主要プラントモデル計算部は、前記訓練シナリオ設定部からの異常事象設定などの訓練シナリオデータを、前記プラントモデルシステム機器モデル計算部及び前記モデルパラメータ通信制御部を経由して受け、また、前記監視・操作部から機器操作信号を受けて、訓練シナリオや運転操作をプラント挙動計算に反映して、前記シミュレーション実行制御部から受けた目標タイムステップのシミュレーション時刻までプラント挙動を計算することを特徴とする運転訓練シミュレータ。 - 請求項7記載の運転訓練シミュレータにおいて、
前記モデルパラメータ通信制御部は、前記訓練シナリオ設定部からの異常事象設定などの訓練シナリオデータや周辺機器の動作状態であるプラントパラメータデータを前記プラントモデルシステム機器モデル計算部から受け、プラントパラメータデータとして前記過酷事故対応主要プラントモデル計算部に出力することを特徴とする運転訓練シミュレータ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012142787A JP5984178B2 (ja) | 2012-06-26 | 2012-06-26 | 運転訓練シミュレータ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012142787A JP5984178B2 (ja) | 2012-06-26 | 2012-06-26 | 運転訓練シミュレータ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014006178A true JP2014006178A (ja) | 2014-01-16 |
| JP5984178B2 JP5984178B2 (ja) | 2016-09-06 |
Family
ID=50104025
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012142787A Active JP5984178B2 (ja) | 2012-06-26 | 2012-06-26 | 運転訓練シミュレータ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5984178B2 (ja) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015176514A (ja) * | 2014-03-18 | 2015-10-05 | 株式会社日立製作所 | プラント事故時運転支援システム |
| KR101585066B1 (ko) * | 2014-07-07 | 2016-01-13 | 주식회사 셈웨어 | 대화형 원자력 중대사고 시뮬레이션 시스템 |
| JP2017062297A (ja) * | 2015-09-24 | 2017-03-30 | 株式会社東芝 | シミュレーション装置とそのモジュール、シミュレーション方法及びプログラム |
| CN107507503A (zh) * | 2017-09-29 | 2017-12-22 | 北京理工大学 | 一种用于培训旋提手法的机械模拟装置 |
| KR20180080565A (ko) * | 2017-01-04 | 2018-07-12 | 한국수력원자력 주식회사 | Tsc 적용 시뮬레이터 및 이의 운용 방법 |
| JP2018156648A (ja) * | 2017-03-17 | 2018-10-04 | ドゥサン ヘヴィー インダストリーズ アンド コンストラクション カンパニー リミテッド | ガスタービンリアルタイムシミュレーションシステムおよびその方法 |
| CN109976185A (zh) * | 2017-12-27 | 2019-07-05 | 核动力运行研究所 | 一种maap5程序与核电站模拟机集成方法 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6129797A (ja) * | 1984-06-11 | 1986-02-10 | ゼネラル・エレクトリツク・カンパニイ | 運搬可能な試験シミユレ−タ及び方法 |
| JPH0371203A (ja) * | 1989-08-02 | 1991-03-27 | Westinghouse Electric Corp <We> | プラント・オペレーティング・システム |
| JPH05249882A (ja) * | 1992-03-04 | 1993-09-28 | Mitsubishi Electric Corp | モジュール結合型シミュレーション方式 |
| JP2000338854A (ja) * | 1999-05-27 | 2000-12-08 | Toshiba Corp | 原子力発電プラントの運転訓練支援方法 |
| JP2011075672A (ja) * | 2009-09-29 | 2011-04-14 | Chuden Kankyo Technos Co Ltd | プラント運転訓練用シミュレータ |
-
2012
- 2012-06-26 JP JP2012142787A patent/JP5984178B2/ja active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6129797A (ja) * | 1984-06-11 | 1986-02-10 | ゼネラル・エレクトリツク・カンパニイ | 運搬可能な試験シミユレ−タ及び方法 |
| JPH0371203A (ja) * | 1989-08-02 | 1991-03-27 | Westinghouse Electric Corp <We> | プラント・オペレーティング・システム |
| JPH05249882A (ja) * | 1992-03-04 | 1993-09-28 | Mitsubishi Electric Corp | モジュール結合型シミュレーション方式 |
| JP2000338854A (ja) * | 1999-05-27 | 2000-12-08 | Toshiba Corp | 原子力発電プラントの運転訓練支援方法 |
| JP2011075672A (ja) * | 2009-09-29 | 2011-04-14 | Chuden Kankyo Technos Co Ltd | プラント運転訓練用シミュレータ |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015176514A (ja) * | 2014-03-18 | 2015-10-05 | 株式会社日立製作所 | プラント事故時運転支援システム |
| KR101585066B1 (ko) * | 2014-07-07 | 2016-01-13 | 주식회사 셈웨어 | 대화형 원자력 중대사고 시뮬레이션 시스템 |
| JP2017062297A (ja) * | 2015-09-24 | 2017-03-30 | 株式会社東芝 | シミュレーション装置とそのモジュール、シミュレーション方法及びプログラム |
| KR20180080565A (ko) * | 2017-01-04 | 2018-07-12 | 한국수력원자력 주식회사 | Tsc 적용 시뮬레이터 및 이의 운용 방법 |
| JP2018156648A (ja) * | 2017-03-17 | 2018-10-04 | ドゥサン ヘヴィー インダストリーズ アンド コンストラクション カンパニー リミテッド | ガスタービンリアルタイムシミュレーションシステムおよびその方法 |
| US10890903B2 (en) | 2017-03-17 | 2021-01-12 | Doosan Heavy Industries & Construction Co., Ltd | Real-time gas turbine simulation system and execution method thereof |
| CN107507503A (zh) * | 2017-09-29 | 2017-12-22 | 北京理工大学 | 一种用于培训旋提手法的机械模拟装置 |
| CN109976185A (zh) * | 2017-12-27 | 2019-07-05 | 核动力运行研究所 | 一种maap5程序与核电站模拟机集成方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5984178B2 (ja) | 2016-09-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5984178B2 (ja) | 運転訓練シミュレータ | |
| JP2011041435A (ja) | 電力系統監視制御システム訓練装置 | |
| JP2012135821A (ja) | ロボットシミュレーション装置、ロボットシミュレーション方法、及びロボットシミュレーションプログラム | |
| US20200273120A1 (en) | Power grid decision-making support device and method, and system applying same | |
| JP5803633B2 (ja) | プレイバックシミュレーション試験システム | |
| US20220222394A1 (en) | Root cause analysis in the synchronization of partial simulations with and without real-time capability | |
| CN108763788B (zh) | 一种信息物理系统的仿真方法和装置 | |
| JP6462469B2 (ja) | 原子力プラントの訓練システム | |
| CN104598306B (zh) | Phm仿真验证中的一种进程调度方法 | |
| CN102096376A (zh) | 半实物仿真中的混合时序同步控制方法 | |
| JP6540473B2 (ja) | デバッグサポートシステム | |
| US20190005167A1 (en) | Method for Synchronizing a Plurality of Simulations | |
| CN102621897B (zh) | 用于无冲突地将设备从待机模式转换到运行模式的方法 | |
| JP2018036945A (ja) | シミュレータ連携装置、シミュレータ連携装置の制御方法、情報処理プログラム、および記録媒体 | |
| JP6120657B2 (ja) | 統合シミュレータ装置、シミュレーション方法、及びプログラム | |
| JP6091764B2 (ja) | シミュレーション装置、シミュレーション方法および連係プログラム | |
| CN103592527A (zh) | 测试系统 | |
| CN101873338A (zh) | 并行模拟的事件同步方法以及模拟器 | |
| JP5219639B2 (ja) | 統合シミュレーション装置 | |
| JP2012088815A (ja) | マイクロプロセッサ動作監視システム | |
| JP6429565B2 (ja) | 作業支援システム | |
| JP7449828B2 (ja) | プラント運転支援システムおよびプラント運転支援方法 | |
| JP7433171B2 (ja) | 表示装置、プラント運転支援システムおよびプラント運転支援方法 | |
| CN119558106B (zh) | 模型离线仿真评估方法、装置、设备及存储介质 | |
| JP2014232462A (ja) | 制御システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150220 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20150220 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160105 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160229 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160726 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160727 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5984178 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |