JP2014013981A - 撮像方法および撮像装置 - Google Patents
撮像方法および撮像装置 Download PDFInfo
- Publication number
- JP2014013981A JP2014013981A JP2012150089A JP2012150089A JP2014013981A JP 2014013981 A JP2014013981 A JP 2014013981A JP 2012150089 A JP2012150089 A JP 2012150089A JP 2012150089 A JP2012150089 A JP 2012150089A JP 2014013981 A JP2014013981 A JP 2014013981A
- Authority
- JP
- Japan
- Prior art keywords
- difference
- imaging
- video information
- information
- output
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images



Landscapes
- Length Measuring Devices By Optical Means (AREA)
- Studio Devices (AREA)
Abstract
【課題】ショットノイズを低減し、投光反射情報のSN比の良い撮像方法および撮像装置を提供する。
【解決手段】投光する時間と投光しない時間との映像の差を取って外光そのものの影響を無くすと共に、動き補償と時間軸方向の平均化によって外光のショットノイズを減じる。このとき差を取る前の映像を用いて動き補償用動きベクトルの検出を行い、動きベクトル検出精度を高める。
【選択図】図1
【解決手段】投光する時間と投光しない時間との映像の差を取って外光そのものの影響を無くすと共に、動き補償と時間軸方向の平均化によって外光のショットノイズを減じる。このとき差を取る前の映像を用いて動き補償用動きベクトルの検出を行い、動きベクトル検出精度を高める。
【選択図】図1
Description
本発明は、撮像方法および撮像装置に係り、特に、発光した光を被写体に照射しその反
射光から被写体を撮像する際に好適な撮像方法および撮像装置に関する。
射光から被写体を撮像する際に好適な撮像方法および撮像装置に関する。
近年、平面パターンを発光させて被写体に照射し、その反射光を撮像して被写体の奥行
を計測する装置が商用化され家庭用ゲーム機などに使われている。このような装置は、例
えば、特許文献1、特表2009−531655号公報に記載されている。また、単に赤外光を投光
してその反射情報から、照明状況に依らない物体固有の映像情報を得ることもできる。こ
のような撮像装置のSN比を改善するために、先願発明特願2011-111669号や特願2011-10
1764号に記載されているように、投光をパルス状にし、投光する期間の映像から投光しな
い期間の映像を差し引いて、外光の影響を取り除く提案がなされている。
を計測する装置が商用化され家庭用ゲーム機などに使われている。このような装置は、例
えば、特許文献1、特表2009−531655号公報に記載されている。また、単に赤外光を投光
してその反射情報から、照明状況に依らない物体固有の映像情報を得ることもできる。こ
のような撮像装置のSN比を改善するために、先願発明特願2011-111669号や特願2011-10
1764号に記載されているように、投光をパルス状にし、投光する期間の映像から投光しな
い期間の映像を差し引いて、外光の影響を取り除く提案がなされている。
しかし屋外で使用する場合、太陽光下など投光の強さに対して外光が著しく強い場合に
は、外光によって発生するショットノイズが相対的に大きくなり、必要な情報(投光反射
情報)のSN比が悪くなる。
ショットノイズは光電変換時に発生する原理的なランダム雑音で、M個の信号電子が得
られる時、rms(自乗平均の平方根)値で√Mのランダム雑音が発生する。例えば電子1万
個の信号がある明るい部分には、rms値で100個のランダム雑音が発生する。これはい
わゆる「kTC雑音」など他の雑音が電子数個以下になったことと比較して大きな雑音で
ある。
は、外光によって発生するショットノイズが相対的に大きくなり、必要な情報(投光反射
情報)のSN比が悪くなる。
ショットノイズは光電変換時に発生する原理的なランダム雑音で、M個の信号電子が得
られる時、rms(自乗平均の平方根)値で√Mのランダム雑音が発生する。例えば電子1万
個の信号がある明るい部分には、rms値で100個のランダム雑音が発生する。これはい
わゆる「kTC雑音」など他の雑音が電子数個以下になったことと比較して大きな雑音で
ある。
本発明の目的はショットノイズを低減し、投光反射情報のSN比の良い撮像方法および
撮像装置を提供することである。
撮像装置を提供することである。
ショットノイズはランダムな雑音なので平均化により低減することができる。本発明で
は、投光反射情報を時間軸方向に平均化してSN比を改善する。時間軸方向に平均化する
と、被写体が動いたり、撮像装置が揺れたりした場合に投光反射情報がぼやけてしまうが
、動きベクトル(MV)を画素ごとに求めて動き補償することにより、ぼやけが生じない
ようにする。このときMVの検出に投光反射情報を用いると、SN比が悪い場合にMV検
出精度が悪くなって、正しく動き補償できず、投光反射情報のSN比改善ができないとか
、投光反射情報がぼやけてしまうことがある。そこで本発明では、投光反射情報よりもS
N比の良い外光反射情報、あるいは(外光+投光)の反射情報を用いてMVを検出する。
は、投光反射情報を時間軸方向に平均化してSN比を改善する。時間軸方向に平均化する
と、被写体が動いたり、撮像装置が揺れたりした場合に投光反射情報がぼやけてしまうが
、動きベクトル(MV)を画素ごとに求めて動き補償することにより、ぼやけが生じない
ようにする。このときMVの検出に投光反射情報を用いると、SN比が悪い場合にMV検
出精度が悪くなって、正しく動き補償できず、投光反射情報のSN比改善ができないとか
、投光反射情報がぼやけてしまうことがある。そこで本発明では、投光反射情報よりもS
N比の良い外光反射情報、あるいは(外光+投光)の反射情報を用いてMVを検出する。
本発明によれば、従来ショットノイズによって入力電子換算で約100個あった雑音を
、例えば128回平均化の場合1/10以下に改善することができる。これにより従来に比べ
てはるかに高い精度で投光反射情報を検知することができ、画像認識に用いた場合に認識
精度を上げることができる。
、例えば128回平均化の場合1/10以下に改善することができる。これにより従来に比べ
てはるかに高い精度で投光反射情報を検知することができ、画像認識に用いた場合に認識
精度を上げることができる。
本発明では、投光反射情報を時間軸方向に平均化してSN比を改善する。平均化の効率
を上げ、悪影響を減じるため、画素ごとにMVを求めて演算する投光反射情報に動き補償
を施して、被写体の同じ部分同士で平均化する。MVの検出には、投光反射情報よりもS
N比の良い外光反射情報、あるいは(外光+投光)の反射情報を用いる。
を上げ、悪影響を減じるため、画素ごとにMVを求めて演算する投光反射情報に動き補償
を施して、被写体の同じ部分同士で平均化する。MVの検出には、投光反射情報よりもS
N比の良い外光反射情報、あるいは(外光+投光)の反射情報を用いる。
図1が、本発明の撮像装置の一実施例を示す回路構成図である。撮像素子301は汎用の
CMOS撮像素子あるいはCCD撮像素子で、全画素で露光期間が同じになるグローバルシャッ
タ型が望ましい。撮像素子出力S1を投光反射情報抽出回路302に入力し、フレーム間の差
により、投光した光のみによる映像情報S2を生成する。映像情報S2は時間軸方向の平均化
処理によりSN比を改善するが、図1の例では平均化処理に巡回型のフィルタ320を用い
る。巡回型のフィルタ320でSN比を改善した映像情報S3を出力端子309より出力する。
CMOS撮像素子あるいはCCD撮像素子で、全画素で露光期間が同じになるグローバルシャッ
タ型が望ましい。撮像素子出力S1を投光反射情報抽出回路302に入力し、フレーム間の差
により、投光した光のみによる映像情報S2を生成する。映像情報S2は時間軸方向の平均化
処理によりSN比を改善するが、図1の例では平均化処理に巡回型のフィルタ320を用い
る。巡回型のフィルタ320でSN比を改善した映像情報S3を出力端子309より出力する。
MV生成回路310では、撮像素子出力S1より画素ごとにMVを求めて巡回型のフィルタ
320に伝達する。撮像素子出力S1は、それのフレーム間差分をとった映像情報S2よりも信
号量が大きく、SN比が良いので、撮像素子出力S1を使ってMVを求める方がより正確な
MVを求めることができる。したがって、巡回型のフィルタ320で行う動き補償の精度も
高くなって、映像情報S3のSN比改善効果も大きくなる。
320に伝達する。撮像素子出力S1は、それのフレーム間差分をとった映像情報S2よりも信
号量が大きく、SN比が良いので、撮像素子出力S1を使ってMVを求める方がより正確な
MVを求めることができる。したがって、巡回型のフィルタ320で行う動き補償の精度も
高くなって、映像情報S3のSN比改善効果も大きくなる。
次に巡回型のフィルタ320の動作例を説明する。
フレームメモリ303には1枚の映像情報が蓄積され、1回前の出力映像情報S4を出力す
る。動き補償回路311では、このS4に画素ごとに動き補償を施し、新たに入力される映像
情報S2と位置合わせされた映像情報S8を得る。差分生成回路304では、このS8と、入力映
像情報S2との差をとって、
S5=S2-S8 (式1)
を出力する。このS5は、除算回路305で1/nにした後、加算回路306でS8と加算され、SN
比を改善した映像情報S6を生成する。nは整数だが、2、4、8、16、32、64、
128…と2の整数乗の値にすることにより、除算回路305が簡単な回路になって好ましい。
フレームメモリ303には1枚の映像情報が蓄積され、1回前の出力映像情報S4を出力す
る。動き補償回路311では、このS4に画素ごとに動き補償を施し、新たに入力される映像
情報S2と位置合わせされた映像情報S8を得る。差分生成回路304では、このS8と、入力映
像情報S2との差をとって、
S5=S2-S8 (式1)
を出力する。このS5は、除算回路305で1/nにした後、加算回路306でS8と加算され、SN
比を改善した映像情報S6を生成する。nは整数だが、2、4、8、16、32、64、
128…と2の整数乗の値にすることにより、除算回路305が簡単な回路になって好ましい。
映像情報S6は以下のようになり、新しい入力映像情報S2を少しずつ影響させていく形に
なり、巡回型フィルタが構成される:
S6=S8+S5/n=(1-1/n)S8+(1/n)S2 (式2)
数値nは、大きいほどSN比改善効果が大きくなると同時に、映像情報の尾引きが増え
るので、用途に応じて定めれば良い。n=64でもSN比は約10倍改善できる。尾引きの
問題は動き補償を正確に行うことにより対策できる。
(式2)から巡回型フィルタの帰還率、すなわち前回の出力が今回の出力に及ぼす影響
は(1-1/n)となるが、除算回路305を簡単にするためにはnを2の整数乗にして、帰還率を
1/2, 3/4, 7/8, 15/16, 31/32, 63/64, 127/128の中から選ぶようにするとよい。
なり、巡回型フィルタが構成される:
S6=S8+S5/n=(1-1/n)S8+(1/n)S2 (式2)
数値nは、大きいほどSN比改善効果が大きくなると同時に、映像情報の尾引きが増え
るので、用途に応じて定めれば良い。n=64でもSN比は約10倍改善できる。尾引きの
問題は動き補償を正確に行うことにより対策できる。
(式2)から巡回型フィルタの帰還率、すなわち前回の出力が今回の出力に及ぼす影響
は(1-1/n)となるが、除算回路305を簡単にするためにはnを2の整数乗にして、帰還率を
1/2, 3/4, 7/8, 15/16, 31/32, 63/64, 127/128の中から選ぶようにするとよい。
スイッチ307では、通常、SN比を改善した映像情報S6が選択されて出力映像情報S3と
なる。場合によっては動き補償が追いつかないほど高速に動く被写体を撮像することもあ
り、そのような場合はSN比を改善した映像情報S6ではなく、入力映像情報S2の方を選択
して出力映像情報S3とする。このスイッチ制御は、図1の例では絶対値生成回路308の出
力S7で行う。すなわち、差分S5の絶対値S7が小さい場合はSN比を改善した映像情報S6を
出力し、絶対値S7が大きい場合は入力映像情報S2の方を出力する。
なる。場合によっては動き補償が追いつかないほど高速に動く被写体を撮像することもあ
り、そのような場合はSN比を改善した映像情報S6ではなく、入力映像情報S2の方を選択
して出力映像情報S3とする。このスイッチ制御は、図1の例では絶対値生成回路308の出
力S7で行う。すなわち、差分S5の絶対値S7が小さい場合はSN比を改善した映像情報S6を
出力し、絶対値S7が大きい場合は入力映像情報S2の方を出力する。
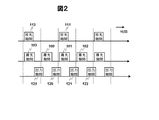
次に投光反射情報抽出回路302とMV生成回路310の具体例を説明する。図2が撮像装置
の動作の一例を示すタイミングチャートで、上から順に投光期間、露光期間、出力期間を
示している。図2の例では、露光期間のうち、2回に1回、投光を行い、露光期間103,
100,101,102で露光した映像情報は、それぞれ直後の出力期間123,120,121,122で撮像素子
301から出力される。露光期間101では、その期間の外光による映像情報に加えて、投光期
間111で投光された光による映像情報も蓄積され、出力期間121で出力される。その中から
投光された光による映像情報だけを抽出するためには、直前の露光期間100で蓄積され出
力期間120で出力された映像情報を差し引けばよい。あるいは直後の露光期間102で蓄積さ
れ出力期間122で出力された映像情報を差し引いてもよい。
の動作の一例を示すタイミングチャートで、上から順に投光期間、露光期間、出力期間を
示している。図2の例では、露光期間のうち、2回に1回、投光を行い、露光期間103,
100,101,102で露光した映像情報は、それぞれ直後の出力期間123,120,121,122で撮像素子
301から出力される。露光期間101では、その期間の外光による映像情報に加えて、投光期
間111で投光された光による映像情報も蓄積され、出力期間121で出力される。その中から
投光された光による映像情報だけを抽出するためには、直前の露光期間100で蓄積され出
力期間120で出力された映像情報を差し引けばよい。あるいは直後の露光期間102で蓄積さ
れ出力期間122で出力された映像情報を差し引いてもよい。
このようにして出力期間121の映像情報から出力期間120あるいは出力期間122の映像情
報を差し引いて投光反射情報S2を生成する。この投光反射情報S2は時間軸方向の平均化処
理によりSN比を改善するが、平均化処理に用いるMVは、出力期間121の映像情報と出
力期間123の映像情報を比較して検出する。これらの映像情報には外光だけでなく投光し
た光による映像情報も含まれ、情報量が多いので高精度にMVを検出できる。出力期間
122の映像情報と出力期間120の映像情報を比較して検出することも可能だが、外光量が少
ないときには情報量が少なくなってMV検出精度が落ちる。
報を差し引いて投光反射情報S2を生成する。この投光反射情報S2は時間軸方向の平均化処
理によりSN比を改善するが、平均化処理に用いるMVは、出力期間121の映像情報と出
力期間123の映像情報を比較して検出する。これらの映像情報には外光だけでなく投光し
た光による映像情報も含まれ、情報量が多いので高精度にMVを検出できる。出力期間
122の映像情報と出力期間120の映像情報を比較して検出することも可能だが、外光量が少
ないときには情報量が少なくなってMV検出精度が落ちる。
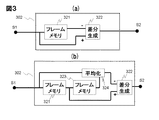
図3(a)(b)が投光反射情報抽出回路302の一例である。(a)が単純に2フレームの差から
投光反射情報を生成する例である。321がフレームメモリ、322が差分生成回路で、(外光
+投光)による映像情報が出力されるフレームで、1フレーム前の映像情報、すなわち外
光のみによる映像情報との差をとって、投光のみによる映像情報(投光反射情報)S2を生
成する。(b)が3フレームの演算で投光反射情報を生成する例である。324が平均化回路で
、外光のみによる映像情報が出力されるフレームで、2フレーム前の映像情報、すなわち
1回前の外光のみによる映像情報との平均をとる。1フレーム前の映像情報が(外光+投
光)によるもので、これと平均化回路324出力との差から、投光反射情報S2を生成する。
(a)の例に比べて1フレーム遅延する欠点があるが、差分生成回路322の2つの入力の平均
時刻を合わせることができる。
投光反射情報を生成する例である。321がフレームメモリ、322が差分生成回路で、(外光
+投光)による映像情報が出力されるフレームで、1フレーム前の映像情報、すなわち外
光のみによる映像情報との差をとって、投光のみによる映像情報(投光反射情報)S2を生
成する。(b)が3フレームの演算で投光反射情報を生成する例である。324が平均化回路で
、外光のみによる映像情報が出力されるフレームで、2フレーム前の映像情報、すなわち
1回前の外光のみによる映像情報との平均をとる。1フレーム前の映像情報が(外光+投
光)によるもので、これと平均化回路324出力との差から、投光反射情報S2を生成する。
(a)の例に比べて1フレーム遅延する欠点があるが、差分生成回路322の2つの入力の平均
時刻を合わせることができる。
図4(a)(b)がMV生成回路310の一例である。(a)がリアルタイムでMVを生成する例で
、フレームメモリ331はMVを検出するフレームのみ動作させる。図2のように交互のフ
レームで投光し、投光反射情報が出力されるフレームでMVを検出する場合、フレームメ
モリ331の出力は2フレーム前の映像情報となる。
MV検出回路332では、この2フレーム前の映像情報と、新しい映像情報を比較して、
映像情報がどの方向にどの程度動いたか(すなわちMV)を検出する。この検出は、例え
ば画素ごとに行われ、その画素の周辺の情報も用いてMVを検出する。
MV検出で難しい点は、変化の乏しい部分などで検出ができない場合があることである
。MVのうち手振れや車振れなど装置の振動によるMVは映像全体で一様な値になるし、
被写体のうち剛体内部は一様な値を示す場合が多い。このことからMVの検出ができない
場合には空間的に周辺のMVから補間することができる。
、フレームメモリ331はMVを検出するフレームのみ動作させる。図2のように交互のフ
レームで投光し、投光反射情報が出力されるフレームでMVを検出する場合、フレームメ
モリ331の出力は2フレーム前の映像情報となる。
MV検出回路332では、この2フレーム前の映像情報と、新しい映像情報を比較して、
映像情報がどの方向にどの程度動いたか(すなわちMV)を検出する。この検出は、例え
ば画素ごとに行われ、その画素の周辺の情報も用いてMVを検出する。
MV検出で難しい点は、変化の乏しい部分などで検出ができない場合があることである
。MVのうち手振れや車振れなど装置の振動によるMVは映像全体で一様な値になるし、
被写体のうち剛体内部は一様な値を示す場合が多い。このことからMVの検出ができない
場合には空間的に周辺のMVから補間することができる。
また、検出できても精度や信頼性が乏しい場合もある。このような場合も、空間的・時
間的に周辺のMVを参照して修正することにより、より精度と信頼性を改善することがで
きる。図4(b)に、このようなMV修正回路333を追加したMV生成回路の例を示す。MV
メモリ334には1フレーム分のMVを記憶しておき、画素ごとに周辺のMVから修正を行
う。周辺のMV情報が揃うまでの時間や計算時間により遅延時間が発生するが、図3(b)
のように投光反射情報S2の生成に1フレーム遅延させる場合にはMV修正の遅延は問題に
ならない。
間的に周辺のMVを参照して修正することにより、より精度と信頼性を改善することがで
きる。図4(b)に、このようなMV修正回路333を追加したMV生成回路の例を示す。MV
メモリ334には1フレーム分のMVを記憶しておき、画素ごとに周辺のMVから修正を行
う。周辺のMV情報が揃うまでの時間や計算時間により遅延時間が発生するが、図3(b)
のように投光反射情報S2の生成に1フレーム遅延させる場合にはMV修正の遅延は問題に
ならない。
図5が、本発明の撮像方法の一実施例を示す処理フローチャートである。一般的に映像
情報では差分を取ると信号量が減ってSN比が悪くなる。差分情報のSN比を改善したい
場合、動きを補償しながら平均化するとSN比を改善することができるが、動き補償に用
いるMVの精度が悪いと目的とするSN比改善ができなくなる。そのため差分を取る前の
、信号量が大きい状態でMVを生成する。
501が入力映像情報データで、例えば撮像素子から出力される。これに差分処理503を行
って所望の情報を得る。これに動き補償処理504と平均化処理505を行ってSN比を改善し
、出力情報データ506を出力する。動き補償処理504に用いるMVはMV生成処理502で生
成するが、差分を取る前のデータを用いることにより、差分データを用いた場合に比べて
精度の高いMVを生成する。
情報では差分を取ると信号量が減ってSN比が悪くなる。差分情報のSN比を改善したい
場合、動きを補償しながら平均化するとSN比を改善することができるが、動き補償に用
いるMVの精度が悪いと目的とするSN比改善ができなくなる。そのため差分を取る前の
、信号量が大きい状態でMVを生成する。
501が入力映像情報データで、例えば撮像素子から出力される。これに差分処理503を行
って所望の情報を得る。これに動き補償処理504と平均化処理505を行ってSN比を改善し
、出力情報データ506を出力する。動き補償処理504に用いるMVはMV生成処理502で生
成するが、差分を取る前のデータを用いることにより、差分データを用いた場合に比べて
精度の高いMVを生成する。
100…露光期間、
101…露光期間、
102…露光期間、
103…露光期間、
111…投光期間、
113…投光期間、
120…出力期間、
121…出力期間、
122…出力期間、
123…出力期間、
301…撮像素子、
302…投光反射情報抽出回路、
303…フレームメモリ、
304…差分生成回路、
305…除算回路、
306…加算回路、
307…スイッチ、
308…絶対値生成回路、
309…出力端子、
310…MV生成回路、
311…動き補償回路、
320…巡回型フィルタ、
321…フレームメモリ、
322…差分生成回路、
323…フレームメモリ、
324…平均化回路、
331…フレームメモリ、
332…MV検出回路、
333…MV修正回路、
334…MVメモリ、
501…入力映像情報データ、
502…MV生成処理、
503…差分処理、
504…動き補償処理、
505…平均化処理、
506…出力情報データ。
101…露光期間、
102…露光期間、
103…露光期間、
111…投光期間、
113…投光期間、
120…出力期間、
121…出力期間、
122…出力期間、
123…出力期間、
301…撮像素子、
302…投光反射情報抽出回路、
303…フレームメモリ、
304…差分生成回路、
305…除算回路、
306…加算回路、
307…スイッチ、
308…絶対値生成回路、
309…出力端子、
310…MV生成回路、
311…動き補償回路、
320…巡回型フィルタ、
321…フレームメモリ、
322…差分生成回路、
323…フレームメモリ、
324…平均化回路、
331…フレームメモリ、
332…MV検出回路、
333…MV修正回路、
334…MVメモリ、
501…入力映像情報データ、
502…MV生成処理、
503…差分処理、
504…動き補償処理、
505…平均化処理、
506…出力情報データ。
Claims (8)
- 映像情報の差分で所望の情報を得る撮像方法において、
上記差分を動き補償する手段と、
動き補償した差分を時間軸方向に平均化する手段とで差分のSN比を改善すると共に、
差分を取る前の映像情報を用いて動き補償用動きベクトルを検出することを特徴とする
撮像方法。 - 第1項記載の撮像方法において、
映像情報の差分がフレーム間差分であることを特徴とする撮像方法。 - 第1項または第2項記載の撮像方法において、
平均化する手段が巡回型フィルタであることを特徴とする撮像方法。 - 第1項〜第3項記載の撮像方法において、
映像情報が外光によるものと、外光と投光によるものであることを特徴とする撮像方法。 - 撮像素子出力の差分で所望の情報を得る撮像装置において、
上記差分を動き補償する手段と、
動き補償した差分を時間軸方向に平均化する手段とで差分のSN比を改善すると共に、
差分を取る前の撮像素子出力を用いて動き補償用動きベクトルを検出することを特徴と
する撮像装置。 - 第5項記載の撮像装置において、
撮像素子出力の差分がフレーム間差分であることを特徴とする撮像装置。 - 第5項または第6項記載の撮像装置において、
平均化する手段が巡回型フィルタであることを特徴とする撮像装置。 - 第5項〜第7項記載の撮像装置において、
間欠的に投光する手段を設けたことを特徴とする撮像装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012150089A JP2014013981A (ja) | 2012-07-04 | 2012-07-04 | 撮像方法および撮像装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012150089A JP2014013981A (ja) | 2012-07-04 | 2012-07-04 | 撮像方法および撮像装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2014013981A true JP2014013981A (ja) | 2014-01-23 |
Family
ID=50109432
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012150089A Pending JP2014013981A (ja) | 2012-07-04 | 2012-07-04 | 撮像方法および撮像装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2014013981A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017510740A (ja) * | 2014-01-31 | 2017-04-13 | ハフ ヒュエルスベック ウント フュルスト ゲーエムベーハー ウント コー. カーゲー | 組立体モジュール |
-
2012
- 2012-07-04 JP JP2012150089A patent/JP2014013981A/ja active Pending
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017510740A (ja) * | 2014-01-31 | 2017-04-13 | ハフ ヒュエルスベック ウント フュルスト ゲーエムベーハー ウント コー. カーゲー | 組立体モジュール |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8848063B2 (en) | Image processing including image correction | |
| JP5589446B2 (ja) | 画像処理装置、撮像装置、および画像処理方法、並びにプログラム | |
| KR101604068B1 (ko) | 고대비 영상 생성 장치 및 방법 | |
| JP7209198B2 (ja) | 距離測定装置および画像生成方法 | |
| US10298843B2 (en) | Image processing device, image processing method, and electronic apparatus for motion detection in image | |
| JPWO2017006546A1 (ja) | 距離測定装置および距離画像合成方法 | |
| JP2014030073A (ja) | 画像処理装置、および画像処理方法、並びにプログラム | |
| US9589339B2 (en) | Image processing apparatus and control method therefor | |
| JP2015204488A (ja) | 動き検出装置および動き検出方法 | |
| US12574658B2 (en) | Moving image noise reduction apparatus and moving image noise reduction method | |
| WO2014027551A1 (ja) | 画像処理装置、および画像処理方法、並びにプログラム | |
| US20130063622A1 (en) | Image sensor and method of capturing an image | |
| JP2015041984A (ja) | 画像処理装置および画像処理方法 | |
| JP2014013981A (ja) | 撮像方法および撮像装置 | |
| US10091442B2 (en) | Image processing apparatus and image processing method | |
| JP5711005B2 (ja) | フリッカ補正方法および画像処理装置 | |
| JP6449320B2 (ja) | 撮像装置 | |
| JP2011259390A (ja) | フリッカ検出装置 | |
| JP6080579B2 (ja) | 撮像装置およびその制御方法 | |
| JP5631153B2 (ja) | 画像処理装置、制御方法、及びプログラム | |
| JP2010045449A (ja) | スミア補正回路、スミア補正方法及び撮像装置 | |
| US9294686B2 (en) | Image capture apparatus and image capture method | |
| JP5772250B2 (ja) | カメラシステムおよび画像生成方法 | |
| JP2014197822A (ja) | 撮像装置 | |
| JP2015019318A (ja) | 撮像装置、撮像装置の制御方法、およびコンピュータプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20140730 |