JP2014149621A - 自律飛行ロボット - Google Patents
自律飛行ロボット Download PDFInfo
- Publication number
- JP2014149621A JP2014149621A JP2013017246A JP2013017246A JP2014149621A JP 2014149621 A JP2014149621 A JP 2014149621A JP 2013017246 A JP2013017246 A JP 2013017246A JP 2013017246 A JP2013017246 A JP 2013017246A JP 2014149621 A JP2014149621 A JP 2014149621A
- Authority
- JP
- Japan
- Prior art keywords
- moving object
- target
- flying robot
- altitude
- autonomous flying
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images









Landscapes
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Abstract
【解決手段】自律飛行ロボットの自己位置を推定し、撮像画像から移動物体位置を推定し、自己位置から移動目標位置へ移動するよう制御する処理を行って、追従飛行する自律飛行ロボットであって、移動目標位置を、位置推定手段にて移動物体位置を推定できるとき所定の標準高度の位置であって移動物体位置から所定の標準離間距離だけ離れた位置に設定し、位置推定手段にて移動物体位置を推定できないとき標準高度よりも高い高高度の位置に設定する。
【選択図】 図5
Description
通信部9は外部装置との間で、例えば無線LANや携帯電話回線等により無線通信するための通信モジュールである。本実施形態では、撮像部3によって取得した撮像画像を図示しない警備センタに設置されたPCに送信することにより、警備員等が遠隔から侵入者を監視することを可能にする。

ST16にて前回設定された目標飛行高度が8m以上であると判定されたとき(ST16−Yes)、処理をST18に進める。一方、ST16にて前回設定された目標飛行高度が8m以上ではないと判定されたとき(ST16−No)、目標飛行高度を現在の飛行高度(自己位置のz軸の座標)よりも1mだけ大きい値に修正する処理を行う(ST17)。例えば、現在の飛行高度が3mであったとき、ST17では今回処理における目標飛行高度として3+1=4mが設定されることになる。なお、上記実施形態では、ST17にて目標飛行高度を「現在の飛行高度+1」によって設定しているが、これに限らず、前回(直前に)設定された目標飛行高度を1mだけ増加する処理を行ってもよい。例えば、直前の処理において、標準高度86として算出された3mの目標飛行高度が設定されていたとき、ST17では今回処理における目標飛行高度として3+1=4mが設定されることになる。いずれにせよ、ST17にて設定される目標飛行高度は、標準高度86よりも高い高高度の位置として設定されることになる。
2・・・ロータ
3・・・撮像部
4・・・距離検出センサ
5・・・ミラー
6・・・モータ
7・・・制御部
71・・・位置推定手段
72・・・速度推定手段
73・・・目標設定手段
74・・・移動経路生成手段
75・・・飛行制御手段
8・・・記憶部
81・・・2Dポイント情報
82・・・ボクセル情報
83・・・標準離間距離
84・・・撮像条件情報
85・・・特徴位置
86・・・標準高度
87・・・各種パラメータ
9・・・通信部
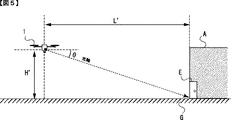
L・・・標準離間距離
L’・・・探索離間距離
M・・・移動物体
Mg・・・移動物体の重心
G・・・地面
A・・・建物
E・・・出入口
Eg・・・出入口位置
Bo・・・占有ボクセル
Bn・・・近接ボクセル
Bf・・・自由ボクセル
Pc・・・移動候補位置
Po・・・移動目標位置
Claims (5)
- 飛行空間内において移動物体に追従飛行して該移動物体を撮像部にて撮像する自律飛行ロボットであって、
記憶部と、
自律飛行ロボットの自己位置を推定する処理と、前記撮像部にて取得した撮像画像及び前記自己位置により前記移動物体の移動物体位置を推定する処理とを行う位置推定手段と、
前記位置推定手段にて前記移動物体位置を推定できるとき、所定の標準高度の位置であって該移動物体位置から所定の標準離間距離だけ離れた位置に移動目標位置を設定する通常設定処理と、前記位置推定手段にて前記移動物体位置を推定できないとき、前記標準高度よりも高い高高度の位置に移動目標位置を設定する探索設定処理とを行う目標設定手段と、
前記自己位置から前記移動目標位置へ移動するよう制御する処理を行う移動制御手段と、を有し、
前記各処理を逐次繰り返すことによって追従飛行することを特徴とする自律飛行ロボット。 - 前記記憶部は、前記撮像部の視野を示す撮像条件情報と前記飛行空間における所定の基準位置とを記憶し、
前記位置推定手段は、自律飛行ロボットの姿勢を更に推定し、
前記目標設定手段は、前記探索設定処理として、前記撮像条件情報を用いて前記高高度の位置から前記基準位置を撮像できる探索離間距離を算出し、該基準位置から該探索離間距離だけ離れた位置に前記移動目標位置を設定し、
前記移動制御手段は、前記位置推定手段にて前記移動物体位置を推定できるとき、前記撮像部が前記移動物体位置の方向を向くよう前記姿勢を制御し、前記位置推定手段にて前記移動物体位置を推定できないとき、前記撮像部が前記基準位置の方向を向くよう前記姿勢を制御する請求項1に記載の自律飛行ロボット。 - 前記移動制御手段は、前記探索設定処理として、直近の期間に推定した前記移動物体位置から前記基準位置を求めて前記記憶部に記憶する処理を行う請求項2に記載の自律飛行ロボット。
- 前記記憶部は、前記移動物体の特徴部位の高さ位置を示す特徴位置を更に記憶し、
前記目標設定手段は、前記通常設定処理として、前記撮像条件情報と前記特徴位置とを用いて前記移動物体位置より前記標準離間距離だけ離れた位置から前記移動物体の特徴部位を撮像できる高度を算出し、該高度を前記標準高度として前記記憶部に記憶する請求項1から請求項3の何れか一項に記載の自律飛行ロボット。 - 前記目標設定手段は、前記撮像画像から前記移動物体の画像領域を抽出し、該画像領域と前記撮像条件情報と前記自己位置とを用いて前記移動物体の高さを推定し、該高さから前記特徴位置を推定して前記記憶部に記憶する請求項4に記載の自律飛行ロボット。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013017246A JP6195450B2 (ja) | 2013-01-31 | 2013-01-31 | 自律飛行ロボット |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013017246A JP6195450B2 (ja) | 2013-01-31 | 2013-01-31 | 自律飛行ロボット |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014149621A true JP2014149621A (ja) | 2014-08-21 |
| JP6195450B2 JP6195450B2 (ja) | 2017-09-13 |
Family
ID=51572568
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013017246A Active JP6195450B2 (ja) | 2013-01-31 | 2013-01-31 | 自律飛行ロボット |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6195450B2 (ja) |
Cited By (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016057720A (ja) * | 2014-09-08 | 2016-04-21 | 日本電産株式会社 | 移動体制御装置及び移動体 |
| JP2016118995A (ja) * | 2014-12-22 | 2016-06-30 | セコム株式会社 | 監視システム |
| JP2016118996A (ja) * | 2014-12-22 | 2016-06-30 | セコム株式会社 | 監視システム |
| JP2016172498A (ja) * | 2015-03-17 | 2016-09-29 | セコム株式会社 | 飛行ロボット制御システム及び飛行ロボット |
| WO2017038891A1 (ja) * | 2015-09-04 | 2017-03-09 | Necソリューションイノベータ株式会社 | 飛行制御装置、飛行制御方法、及びコンピュータ読み取り可能な記録媒体 |
| WO2017051732A1 (ja) * | 2015-09-25 | 2017-03-30 | 株式会社日本自動車部品総合研究所 | 飛行装置 |
| JP2017061298A (ja) * | 2015-09-25 | 2017-03-30 | 株式会社日本自動車部品総合研究所 | 飛行装置 |
| JP2017068298A (ja) * | 2015-09-28 | 2017-04-06 | 株式会社日立システムズ | 自律飛行移動体、ターゲット追跡方法 |
| WO2017057157A1 (ja) * | 2015-09-30 | 2017-04-06 | 株式会社ニコン | 飛行装置、移動装置、サーバおよびプログラム |
| JP2017138947A (ja) * | 2016-01-28 | 2017-08-10 | パナソニック インテレクチュアル プロパティ コーポレーション オブ アメリカPanasonic Intellectual Property Corporation of America | 飛行高度制御装置、無人飛行体、飛行高度制御方法及び飛行高度制御プログラム |
| JP2017159750A (ja) * | 2016-03-08 | 2017-09-14 | 国立大学法人京都大学 | 無人航空機位置推定方法及びシステム |
| JP2018121351A (ja) * | 2018-03-13 | 2018-08-02 | 株式会社プロドローン | 生体探索システム |
| JP2019018845A (ja) * | 2017-07-18 | 2019-02-07 | 三星電子株式会社Samsung Electronics Co.,Ltd. | 外部客体との距離に基づいて移動する電子装置 |
| US10767347B2 (en) | 2016-01-29 | 2020-09-08 | Sumitomo(S.H.I.) Construction Machinery Co., Ltd. | Shovel and autonomous aerial vehicle flying around shovel |
| US10927528B2 (en) | 2015-09-15 | 2021-02-23 | Sumitomo(S.H.I.) Construction Machinery Co., Ltd. | Shovel |
| JPWO2022085368A1 (ja) * | 2020-10-20 | 2022-04-28 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004299025A (ja) * | 2003-04-01 | 2004-10-28 | Honda Motor Co Ltd | 移動ロボット制御装置、移動ロボット制御方法及び移動ロボット制御プログラム |
| JP2006146551A (ja) * | 2004-11-19 | 2006-06-08 | Matsushita Electric Ind Co Ltd | ロボット |
-
2013
- 2013-01-31 JP JP2013017246A patent/JP6195450B2/ja active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004299025A (ja) * | 2003-04-01 | 2004-10-28 | Honda Motor Co Ltd | 移動ロボット制御装置、移動ロボット制御方法及び移動ロボット制御プログラム |
| JP2006146551A (ja) * | 2004-11-19 | 2006-06-08 | Matsushita Electric Ind Co Ltd | ロボット |
Cited By (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016057720A (ja) * | 2014-09-08 | 2016-04-21 | 日本電産株式会社 | 移動体制御装置及び移動体 |
| JP2016118995A (ja) * | 2014-12-22 | 2016-06-30 | セコム株式会社 | 監視システム |
| JP2016118996A (ja) * | 2014-12-22 | 2016-06-30 | セコム株式会社 | 監視システム |
| JP2016172498A (ja) * | 2015-03-17 | 2016-09-29 | セコム株式会社 | 飛行ロボット制御システム及び飛行ロボット |
| WO2017038891A1 (ja) * | 2015-09-04 | 2017-03-09 | Necソリューションイノベータ株式会社 | 飛行制御装置、飛行制御方法、及びコンピュータ読み取り可能な記録媒体 |
| JPWO2017038891A1 (ja) * | 2015-09-04 | 2018-05-31 | Necソリューションイノベータ株式会社 | 飛行制御装置、飛行制御方法、及びプログラム |
| US10927528B2 (en) | 2015-09-15 | 2021-02-23 | Sumitomo(S.H.I.) Construction Machinery Co., Ltd. | Shovel |
| JP2017061298A (ja) * | 2015-09-25 | 2017-03-30 | 株式会社日本自動車部品総合研究所 | 飛行装置 |
| WO2017051732A1 (ja) * | 2015-09-25 | 2017-03-30 | 株式会社日本自動車部品総合研究所 | 飛行装置 |
| JP2017068298A (ja) * | 2015-09-28 | 2017-04-06 | 株式会社日立システムズ | 自律飛行移動体、ターゲット追跡方法 |
| WO2017057157A1 (ja) * | 2015-09-30 | 2017-04-06 | 株式会社ニコン | 飛行装置、移動装置、サーバおよびプログラム |
| JPWO2017057157A1 (ja) * | 2015-09-30 | 2018-09-13 | 株式会社ニコン | 飛行装置、移動装置、電子機器およびプログラム |
| JP2017138947A (ja) * | 2016-01-28 | 2017-08-10 | パナソニック インテレクチュアル プロパティ コーポレーション オブ アメリカPanasonic Intellectual Property Corporation of America | 飛行高度制御装置、無人飛行体、飛行高度制御方法及び飛行高度制御プログラム |
| JP2020194590A (ja) * | 2016-01-28 | 2020-12-03 | パナソニック インテレクチュアル プロパティ コーポレーション オブ アメリカPanasonic Intellectual Property Corporation of America | 飛行高度制御装置、無人飛行体、飛行高度制御方法及び飛行高度制御プログラム |
| US10767347B2 (en) | 2016-01-29 | 2020-09-08 | Sumitomo(S.H.I.) Construction Machinery Co., Ltd. | Shovel and autonomous aerial vehicle flying around shovel |
| US11492783B2 (en) | 2016-01-29 | 2022-11-08 | Sumitomo(S.H.I) Construction Machinery Co., Ltd. | Shovel and autonomous aerial vehicle flying around shovel |
| JP2017159750A (ja) * | 2016-03-08 | 2017-09-14 | 国立大学法人京都大学 | 無人航空機位置推定方法及びシステム |
| JP2019018845A (ja) * | 2017-07-18 | 2019-02-07 | 三星電子株式会社Samsung Electronics Co.,Ltd. | 外部客体との距離に基づいて移動する電子装置 |
| US11198508B2 (en) | 2017-07-18 | 2021-12-14 | Samsung Electronics Co., Ltd. | Electronic device moved based on distance from external object and control method thereof |
| JP2018121351A (ja) * | 2018-03-13 | 2018-08-02 | 株式会社プロドローン | 生体探索システム |
| JPWO2022085368A1 (ja) * | 2020-10-20 | 2022-04-28 | ||
| JP7750246B2 (ja) | 2020-10-20 | 2025-10-07 | ソニーグループ株式会社 | 情報処理装置、情報処理システム、および方法、並びにプログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6195450B2 (ja) | 2017-09-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6195450B2 (ja) | 自律飛行ロボット | |
| JP6029446B2 (ja) | 自律飛行ロボット | |
| JP5990453B2 (ja) | 自律移動ロボット | |
| JP6140458B2 (ja) | 自律移動ロボット | |
| JP6235213B2 (ja) | 自律飛行ロボット | |
| US20220335844A1 (en) | Systems and methods for vehicle guidance | |
| JP6014485B2 (ja) | 自律飛行ロボット | |
| JP6664162B2 (ja) | 自律飛行ロボット | |
| JP6599143B2 (ja) | 自律移動ロボット | |
| JP6014484B2 (ja) | 自律移動ロボット | |
| JP6527726B2 (ja) | 自律移動ロボット | |
| KR101956447B1 (ko) | 그래프 구조 기반의 무인체 위치 추정 장치 및 그 방법 | |
| JP6758068B2 (ja) | 自律移動ロボット | |
| JP6469492B2 (ja) | 自律移動ロボット | |
| JP6530212B2 (ja) | 自律移動ロボット | |
| Chow et al. | Toward underground localization: Lidar inertial odometry enabled aerial robot navigation | |
| JP2017182692A (ja) | 自律移動ロボット | |
| JP6595284B2 (ja) | 自律移動ロボット | |
| US20210311195A1 (en) | Vision-cued random-access lidar system and method for localization and navigation | |
| CN110997488A (zh) | 动态控制用于处理传感器输出数据的参数的系统和方法 | |
| JP2023070120A (ja) | 自律飛行制御方法、自律飛行制御装置および自律飛行制御システム | |
| JP6758069B2 (ja) | 自律飛行ロボット | |
| JP2021047744A (ja) | 情報処理装置、情報処理方法及び情報処理プログラム | |
| JP2025089391A (ja) | 飛行体、点検方法及び点検システム | |
| JP2020071154A (ja) | 位置推定装置、位置推定方法、プログラム、及び記録媒体 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160119 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20161124 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20161213 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170207 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170808 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170815 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6195450 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |