JP2014181981A - 電流センサ - Google Patents
電流センサ Download PDFInfo
- Publication number
- JP2014181981A JP2014181981A JP2013056098A JP2013056098A JP2014181981A JP 2014181981 A JP2014181981 A JP 2014181981A JP 2013056098 A JP2013056098 A JP 2013056098A JP 2013056098 A JP2013056098 A JP 2013056098A JP 2014181981 A JP2014181981 A JP 2014181981A
- Authority
- JP
- Japan
- Prior art keywords
- wave signal
- magnetic field
- self
- current
- circuit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images









Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R15/00—Details of measuring arrangements of the types provided for in groups G01R17/00 - G01R29/00, G01R33/00 - G01R33/26 or G01R35/00
- G01R15/14—Adaptations providing voltage or current isolation, e.g. for high-voltage or high-current networks
- G01R15/20—Adaptations providing voltage or current isolation, e.g. for high-voltage or high-current networks using galvano-magnetic devices, e.g. Hall-effect devices, i.e. measuring a magnetic field via the interaction between a current and a magnetic field, e.g. magneto resistive or Hall effect devices
- G01R15/205—Adaptations providing voltage or current isolation, e.g. for high-voltage or high-current networks using galvano-magnetic devices, e.g. Hall-effect devices, i.e. measuring a magnetic field via the interaction between a current and a magnetic field, e.g. magneto resistive or Hall effect devices using magneto-resistance devices, e.g. field plates
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R35/00—Testing or calibrating of apparatus covered by the other groups of this subclass
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Measuring Instrument Details And Bridges, And Automatic Balancing Devices (AREA)
Abstract
【課題】電流センサにおいて、センサ素子を2個用いなくても自己診断を可能とする。
【解決手段】電流センサ10は、被検出電流Iが流れることによって生じる電流磁界Biに対して垂直方向にバイアス磁界Bbを発生させるバイアス磁石30を備えている。また、電流センサ10は、複数の磁気抵抗素子41〜48が外部の磁場の影響を受けたときの各磁気抵抗素子41〜48の抵抗値の変化に基づき、バイアス磁界Bbと、電流磁界Bi及びバイアス磁界Bbで構成される合成磁界Bsと、の成す角度θに応じた正弦値を含む正弦波信号及び余弦値を含む余弦波信号を出力するセンサ素子40を備えている。さらに、電流センサ10は、センサ素子40から正弦波信号及び余弦波信号を入力し、正弦波信号及び余弦波信号に基づいてセンサ素子40の故障判定を行う自己診断回路55を備えている。
【選択図】図3
【解決手段】電流センサ10は、被検出電流Iが流れることによって生じる電流磁界Biに対して垂直方向にバイアス磁界Bbを発生させるバイアス磁石30を備えている。また、電流センサ10は、複数の磁気抵抗素子41〜48が外部の磁場の影響を受けたときの各磁気抵抗素子41〜48の抵抗値の変化に基づき、バイアス磁界Bbと、電流磁界Bi及びバイアス磁界Bbで構成される合成磁界Bsと、の成す角度θに応じた正弦値を含む正弦波信号及び余弦値を含む余弦波信号を出力するセンサ素子40を備えている。さらに、電流センサ10は、センサ素子40から正弦波信号及び余弦波信号を入力し、正弦波信号及び余弦波信号に基づいてセンサ素子40の故障判定を行う自己診断回路55を備えている。
【選択図】図3
Description
本発明は、自己診断回路を備えた電流センサに関する。
従来より、故障診断機能を備えた電流検出器が、例えば特許文献1で提案されている。具体的に、特許文献1では、磁性体コアの一つのギャップに二つの感磁素子が配置され、各感磁素子に対して同じ構成の信号処理回路が備えられており、各信号処理回路の出力を比較することにより故障を判定する電流検出器の構成が提案されている。すなわち、電流検出器には、感磁素子と信号処理回路とで構成された回路が2つ設けられている。
しかしながら、上記従来の技術では、電流検出器の故障を診断するために電流を検出するための回路と全く同じ構成の故障診断用の回路が別個に設けられている。このため、電流検出器の全体構成が煩雑になると共に故障診断を行うためのコストが高くなるという問題がある。
本発明は上記点に鑑み、磁気を検出するセンサ素子を用いて電流を検出する電流センサにおいて、センサ素子を2個用いなくても自己診断を可能とすることを目的とする。
上記目的を達成するため、請求項1に記載の発明では、電流センサは、被検出電流経路(80)に被検出電流が流れることによって生じる第1磁界(Bi)に対して垂直方向に第2磁界(Bb)を発生させる磁界発生手段(30)を備えている。
電流センサは、複数の磁気抵抗素子(41〜48)を有し、複数の磁気抵抗素子(41〜48)が外部の磁場の影響を受けたときの複数の磁気抵抗素子(41〜48)の抵抗値の変化に基づいて、第2磁界(Bb)と、第1磁界(Bi)及び第2磁界(Bb)で構成される合成磁界(Bs)と、の成す角度θに応じた正弦値を含む正弦波信号及び余弦値を含む余弦波信号を出力するセンサ素子(40)を備えている。
また、電流センサは、センサ素子(40)から正弦波信号及び余弦波信号を入力し、正弦波信号及び余弦波信号に対して所定の演算を行うことにより被検出電流の大きさに対応したセンサ信号を出力する出力演算回路(54)を備えている。
さらに、電流センサは、センサ素子(40)から正弦波信号及び余弦波信号を入力すると共に、正弦波信号及び余弦波信号に基づいてセンサ素子(40)の故障判定を行う自己診断回路(55)を備えていることを特徴とする。
このように、センサ素子(40)が出力する正弦波信号及び余弦波信号の2つの信号に基づいて故障診断を行う自己診断回路(55)を備えているので、故障診断のためのセンサ素子(40)及び出力演算回路(54)を別途設ける必要がない。したがって、1つのセンサ素子(40)及び1つの出力演算回路(54)を備えた電流センサにおいて自己診断を可能とすることができる。
なお、この欄及び特許請求の範囲で記載した各手段の括弧内の符号は、後述する実施形態に記載の具体的手段との対応関係を示すものである。
以下、本発明の実施形態について図に基づいて説明する。なお、以下の各実施形態相互において、互いに同一もしくは均等である部分には、図中、同一符号を付してある。
(第1実施形態)
以下、本発明の第1実施形態について図を参照して説明する。本実施形態に係る電流センサは、例えば、車載バッテリ等に接続されるバスバーに流れる被検出電流を検出するものである。
以下、本発明の第1実施形態について図を参照して説明する。本実施形態に係る電流センサは、例えば、車載バッテリ等に接続されるバスバーに流れる被検出電流を検出するものである。
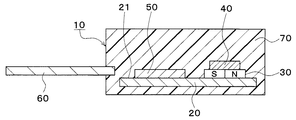
図1及び図2に示されるように、電流センサ10は、基板20、バイアス磁石30、センサ素子40、回路チップ50、リード60、及びモールド樹脂70を備えて構成されている。
バイアス磁石30は、検出対象であるバスバー80に被検出電流Iが流れることによって生じる電流磁界Biに対して垂直方向にバイアス磁界Bbを発生させるものである。バイアス磁石30は、基板20の一面21に設置されている。バイアス磁石30は、このバイアス磁界Bbをセンサ素子40に印加する役割を果たす。
センサ素子40は、外部の磁場の影響を受けたときに抵抗値が変化する複数の磁気抵抗素子を有する板状のチップ部品である。図2に示されるように、センサ素子40はバイアス磁石30の上に配置されている。このため、例えば、センサ素子40が矩形状のバイアス磁石30の角部近傍等に配置される場合と比較して、各磁気抵抗素子に影響するバイアス磁界Bbの角度のばらつきが抑制される。
回路チップ50は、センサ素子40から入力した信号に対して予め設定された演算を行うための信号処理回路を備えている。回路チップ50は、基板20の一面21に設置されている。
リード60は、外部と電流センサ10とを電気的に接続するための接続部品である。本実施形態では、複数のリード60が当該リード60の長手方向に垂直な方向に並べられている。そして、各リード60が図示しないワイヤを介して回路チップ50と電気的に接続されている。
モールド樹脂70は、基板20、バイアス磁石30、センサ素子40、回路チップ50、及びリード60の一部を封止した封止部材である。具体的には、モールド樹脂70は、リード60のうち基板20側とは反対側の部分すなわちアウターリードの部分が露出するように、各部品20、30、40、50、60を封止している。これにより、電流センサ10はモールドIC化されている。モールド樹脂70の材料として、例えばエポキシ樹脂等が採用される。
上記の構成を有する電流センサ10は、図1に示されるように、バスバー80に組み付けられる。具体的には、電流センサ10は、バスバー80に流れる電流方向すなわちバスバー80の長手方向とバイアス磁界Bbとが平行になるように、バスバー80に組み付けられる。言い換えると、電流センサ10は、バスバー80に流れる被検出電流Iによって生成される電流磁界Biとバイアス磁界Bbとが垂直となるように、バスバー80に組み付けられる。そして、センサ素子40には、バイアス磁界Bb及び電流磁界Biで構成される合成磁界Bsが印加されるようになっている。
次に、電流センサ10におけるセンサ素子40と回路チップ50の回路構成について説明する。図3に示されるように、センサ素子40は、第1検出部40aと、第2検出部40bと、を有している。第1検出部40aは、4つの磁気抵抗素子41〜44がブリッジ回路を形成するように構成されている。また、第2検出部40bは、4つの磁気抵抗素子45〜48がブリッジ回路を形成するように構成されている。
磁気抵抗素子41〜48は、図示しないが、下部電極の上にピン磁性層、トンネル層、フリー磁性層、及び上部電極が順に形成されたTMR素子として構成されている。ピン磁性層は磁化の向きが固定された強磁性金属層である。トンネル層はトンネル効果によりフリー磁性層からピン磁性層に電流を流すための絶縁層である。フリー磁性層は、外部の磁場の影響を受けて磁化の向きが変化する強磁性金属層である。
ここで、第1検出部40aを構成する各磁気抵抗素子41〜44はそれぞれピン磁性層の磁化方向が互いに平行とされている。また、第2検出部40bを構成する各磁気抵抗素子45〜48のピン磁性層の磁化方向は、第1検出部40aを構成する各磁気抵抗素子41〜44のピン磁性層の磁化方向に対して垂直とされている。
そして、センサ素子40は、第1検出部40aの各磁気抵抗素子41〜44の磁化方向がバイアス磁界Bbと垂直となると共に、第2検出部40bの各磁気抵抗素子45〜48の磁化方向がバイアス磁界Bbと平行となるようにバイアス磁石30の上に設置される。このため、図1に示されるように、バイアス磁界Bbと合成磁界Bsとの成す角度をθとすると、第1検出部40aから出力される電圧信号Vs+、Vs−は、正弦値すなわちsinθを含む信号(SIN出力)となる。一方、第2検出部40bから出力される電圧信号Vc+、Vc−は余弦値すなわちcosθを含む信号(COS出力)となる。
したがって、センサ素子40は、複数の磁気抵抗素子41〜48が外部の磁場の影響を受けたときの複数の磁気抵抗素子41〜48の抵抗値の変化に基づいて、バイアス磁界Bbと合成磁界Bsとの成す角度θに応じた電圧信号を出力する。
回路チップ50は、電源回路51、第1増幅回路52、第2増幅回路53、出力演算回路54、及び自己診断回路55を有している。さらに、回路チップ50は、電源端子56(V)、出力端子57(Vout)、ダイアグ端子58(Diag)、及びグランド端子59(GND)を備えている。
電源回路51は、電源端子56を介して外部の電源から印加される電源電圧Vに基づいて一定の電圧を生成する定電圧回路である。具体的には、電源回路51は、電源電圧Vから生成した定電圧Vccをセンサ素子40の第1検出部40aの磁気抵抗素子41、44の中点、及び第2検出部40bの磁気抵抗素子45、48の中点に印加する。また、電源回路51は、各増幅回路52、53、出力演算回路54、及び自己診断回路55を動作させるための電圧を生成してそれぞれに印加する。
第1増幅回路52は、センサ素子40の第1検出部40aから入力した電圧信号Vs+、Vs−を増幅して正弦値すなわちsinθを含む正弦波信号Vsを出力する回路である。第1増幅回路52は、例えば差動増幅回路として構成されている。この場合、第1増幅回路52の一方の入力端子が第1検出部40aの磁気抵抗素子43、44の中点に接続され、当該入力端子に電圧信号Vs+が入力される。また、第1増幅回路52の他方の入力端子が磁気抵抗素子41、42の中点に接続され、当該入力端子に電圧信号Vs−が入力される。したがって、第1増幅回路52は、入力された電圧信号Vs+、Vs−を差動増幅して出力演算回路54に正弦波信号Vsを出力する。
第2増幅回路53は、センサ素子40の第2検出部40bから入力した電圧信号Vc+、Vc−を増幅して余弦値すなわちcosθを含む余弦波信号Vcを出力する回路である。第2増幅回路53は、第1増幅回路52と同様に差動増幅回路として構成されている。この場合、第2増幅回路53の一方の入力端子が第2検出部40bの磁気抵抗素子47、48の中点に接続され、当該入力端子に電圧信号Vc+が入力される。また、第2増幅回路53の他方の入力端子が磁気抵抗素子45、46の中点に接続され、当該入力端子に電圧信号Vc−が入力される。したがって、第2増幅回路53は、入力された電圧信号Vc+、Vc−を差動増幅して出力演算回路54に余弦波信号Vcを出力する。
上記の正弦波信号Vsは、例えばVs=A・sinθとして表される。また、余弦波信号Vcは、例えばVc=A・cosθとして表される。ここで、各増幅回路52、53は同じ構成であるので、増幅率は同じ値となる。また、各検出部40a、40bは、ピン磁性層の磁化方向以外は同じ構成とされている磁気抵抗素子41〜48にて構成されているので、温度特性も同じ値となる。したがって、「A」は正弦波信号Vs及び余弦波信号Vcで共通のパラメータである。
出力演算回路54は、センサ素子40から正弦波信号Vs及び余弦波信号Vcを入力し、正弦波信号Vs及び余弦波信号Vcに対して所定の演算を行うことにより被検出電流Iの大きさに対応したセンサ信号を出力する回路である。具体的には、出力演算回路54は、各増幅回路52、53から入力した正弦波信号Vs及び余弦波信号Vcを用いてバイアス磁界Bbと合成磁界Bsとの成す角度θにおける正接値(tanθ)を演算し、この正接値に対応する信号をセンサ信号として出力端子57を介して外部に出力する。すなわち、出力演算回路54は、正弦波信号Vsを余弦波信号Vcで除算して正接値(tanθ)を取得する演算を行い、この演算結果に対応する信号をセンサ信号として出力する。
図1に示されるように、tanθ=(電流磁界Bi)/(バイアス磁界Bb)となることと、バイアス磁界Bbはバイアス磁石30により構成されるもので一定であることにより、センサ信号はバスバー80に流れる被検出電流Iが生成する電流磁界Biに比例する信号となる。つまり、センサ信号はバスバー80に流れる被検出電流Iに対してリニアに変化する信号となる。出力演算回路54はこのtanθに対応する信号をセンサ信号として出力する。
なお、「正接値に対応する信号をセンサ信号として出力する」とは、演算した正接値に対して所定のオフセットを付加した値をセンサ信号として出力したり、演算した正接値をそのままセンサ信号として出力したりすることである。本実施形態では演算した正接値をそのまま出力する。
自己診断回路55は、センサ素子40から正弦波信号Vs及び余弦波信号Vcを入力すると共に、正弦波信号Vs及び余弦波信号Vcに基づいてセンサ素子40もしくは各増幅回路52、53の故障判定を行う回路である。正弦波信号Vsや余弦波信号Vcはセンサ素子40及び各増幅回路52、53を経由して得られた信号であるので、自己診断回路55はセンサ素子40及び各増幅回路52、53のいずれかに故障の可能性があることを診断することとなる。
具体的に、自己診断回路55は、Vs2とVc2との和を演算し、この演算結果と予め設定された故障判定値とを比較することにより、センサ素子40の故障判定を行う。故障判定値は、Vs2+Vc2の正常値の範囲と異常値の範囲との境界値すなわち閾値であり、製品出荷時に自己診断回路55に設けられた記憶手段に記憶される。
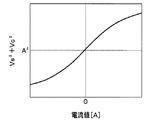
そして、センサ素子40が正常に動作している場合、上述のように、正弦波信号VsはVs=A・sinθで表され、余弦波信号VcはVc=A・cosθで表される。したがって、Vs2とVc2との和は、Vs2+Vc2=A2(sin2θ+cos2θ)=A2となる。すなわち、Vs2とVc2との和は、図4に示されるように、被検出電流Iの電流値に関らず一定の値となる。このような場合、自己診断回路55はA2と故障判定値とを比較し、演算結果であるA2が正常範囲に含まれていると判定すると共にセンサ素子40や各増幅回路52、53は正常であると判定する。
一方、センサ素子40が劣化等したことにより、異常が発生した場合、正弦波信号Vsや余弦波信号Vcに故障の成分が含まれる。例えば、正弦波信号Vsにオフセット変動が生じた場合、正弦波信号VsはVs=A・sinθ+Voffsで表される。このため、Vs2とVc2との和にはVoffsの成分やsinθの成分が含まれる。したがって、図5に示されるように、Vs2とVc2との和は電流値に対して一定にならない。
また、余弦波信号Vcにオフセット変動が生じた場合、余弦波信号VcはVc=A・cosθ+Voffcで表される。このため、Vs2とVc2との和にはVoffcの成分やcosθの成分が含まれる。したがって、図6に示されるように、Vs2とVc2との和は電流値に対して一定にならない。
このように、Vs2とVc2との和が電流値に対して一定にならない場合、Vs2とVc2との和は、正常範囲を超えてしまう。したがって、自己診断回路55はVs2とVc2との和と故障判定値とを比較し、演算結果が異常であると判定すると共にセンサ素子40や各増幅回路52、53のいずれかに異常が発生していると判定する。
自己診断回路55は、上記のように故障判定を行った後、ダイアグ端子58を介して故障診断結果を外部に出力する。具体的には、図7に示されるように、自己診断結果が正常の場合、自己診断回路55は通常動作時の出力電圧を自己診断正常時の出力電圧として出力する。すなわち、自己診断正常時、自己診断回路55はダイアグ端子58に印加する電圧を変化させない。
一方、自己診断結果が異常の場合、自己診断回路55は通常動作時よりも高い出力電圧を出力する。すなわち、自己診断異常時、自己診断回路55はダイアグ端子58に印加する電圧を変化させる。このようにして、自己診断回路55は外部に異常を伝える。
以上説明したように、本実施形態では、正弦波信号Vs及び余弦波信号Vcの2つの信号に基づいて故障診断を行う自己診断回路55を備えていることが特徴となっている。また、自己診断回路55は、正弦波信号Vs及び余弦波信号Vcの角度成分を利用して故障診断を行っているので、故障診断のためのセンサ素子40及び出力演算回路54の別途の構成を不要とすることができる。したがって、電流センサ10に備えられた1つのセンサ素子40及び1つの出力演算回路54によって自己診断を可能とすることができる。
ここで、バスバー80に流れる被検出電流Iは常に一定の値ではない。このような「電流」という測定対象に対して電流センサ10は電流値の平均値やピーク値を検出することになる。したがって、電流センサ10が検出した電流値が本当に正しい値であるかを確かめるためには、従来は全く同じ構成の電流検出部を設けて両者の値を比較しなければならなかった。しかしながら、本実施形態に係る電流センサ10は、故障の成分が含まれた正弦波信号Vs及び余弦波信号Vcを用いて故障判定を行っている。したがって、センサ素子40の出力と、全く同じ構成の他のセンサ素子の出力と、の比較を行う必要がなく、自己診断回路55を設けるだけで電流センサ10の自己診断機能を実現することができる。
なお、本実施形態の記載と特許請求の範囲の記載との対応関係については、電流磁界Biが特許請求の範囲の「第1磁界」に対応し、バイアス磁界Bbが特許請求の範囲の「第2磁界」に対応する。また、バイアス磁石30が特許請求の範囲の「磁界発生手段」に対応し、バスバー80が特許請求の範囲の「被検出電流経路」に対応する。
(第2実施形態)
本実施形態では、第1実施形態と異なる部分について説明する。本実施形態では、自己診断回路55は、正弦波信号Vs及び余弦波信号Vcによって描かれるリサージュ波形に基づいて故障判定を行う。
本実施形態では、第1実施形態と異なる部分について説明する。本実施形態では、自己診断回路55は、正弦波信号Vs及び余弦波信号Vcによって描かれるリサージュ波形に基づいて故障判定を行う。
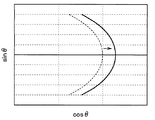
すなわち、自己診断回路55は各増幅回路52、53から入力した正弦波信号Vs及び余弦波信号Vcによってリサージュ波形を描く。リサージュ波形は、図8に示されるように、正弦波信号Vs及び余弦波信号Vcの二つの単振動を合成して直交座標上に描かれる平面図形である。図8は、例えば製品出荷時の正常なリサージュ波形である。
そして、正弦波信号Vsにオフセット変動が生じた場合、図9に示されるように、リサージュ波形は正常時からsinθ軸方向に移動する。一方、余弦波信号Vcにオフセット変動が生じた場合、図10に示されるように、リサージュ波形は正常時からcosθ軸方向に移動する。
したがって、自己診断回路55は、正弦波信号Vs及び余弦波信号Vcによって描かれたリサージュ波形と、予め設定された製品出荷時のリサージュ波形に基づく故障判定値と、を比較することにより、センサ素子40の故障判定を行う。すなわち、自己診断回路55は、製品出荷時の円波形から所定量だけ外れたか否かを判定する。以上のように、リサージュ波形を描くことにより、故障を視覚的に容易に判定することができる。
(第3実施形態)
本実施形態では、第1、第2実施形態と異なる部分について説明する。本実施形態では、自己診断回路55は、sinθと(1−cos2θ)1/2とを比較するか、または、(1−sin2θ)1/2とcosθとを比較することにより、センサ素子40の故障判定を行う。このように、正弦及び余弦をsinθもしくはcosθで表すことができる。したがって、自己診断回路55は、故障判定値を用いずに、正弦波信号Vs及び余弦波信号Vcを用いて故障判定を行うこともできる。
本実施形態では、第1、第2実施形態と異なる部分について説明する。本実施形態では、自己診断回路55は、sinθと(1−cos2θ)1/2とを比較するか、または、(1−sin2θ)1/2とcosθとを比較することにより、センサ素子40の故障判定を行う。このように、正弦及び余弦をsinθもしくはcosθで表すことができる。したがって、自己診断回路55は、故障判定値を用いずに、正弦波信号Vs及び余弦波信号Vcを用いて故障判定を行うこともできる。
(第4実施形態)
本実施形態では、第1〜第3実施形態と異なる部分について説明する。図11に示されるように、本実施形態に係る回路チップ50では、自己診断回路55が出力端子57(Vout/Diag)に接続されている。これにより、自己診断回路55は、出力端子57を介して外部に自己診断結果を出力する。言い換えると、出力端子57はセンサ信号と自己診断結果の両方を出力する兼用の端子として機能する。
本実施形態では、第1〜第3実施形態と異なる部分について説明する。図11に示されるように、本実施形態に係る回路チップ50では、自己診断回路55が出力端子57(Vout/Diag)に接続されている。これにより、自己診断回路55は、出力端子57を介して外部に自己診断結果を出力する。言い換えると、出力端子57はセンサ信号と自己診断結果の両方を出力する兼用の端子として機能する。
通常、出力演算回路54は、図12に示されるように、一定範囲内の通常状態出力電圧の電圧を出力する。しかしながら、自己診断回路55は、センサ素子40が故障していると判定した場合、出力演算回路54の出力を変化させる。
具体的には、自己診断回路55は、一定範囲の通常状態出力電圧を超えた電圧値を出力端子57に印加する。本実施形態では、自己診断回路55は、自己診断異常時、一定範囲の通常状態出力電圧の最大値よりも高い電圧を出力する。このようにして、出力端子57を介して自己診断結果を外部に出力することもできる。また、ダイアグ端子58を不要とすることができ、回路チップ50の構成を簡略化することができる。
(他の実施形態)
上記各実施形態で示された電流センサ10の構成は一例であり、上記で示した構成に限定されることなく、本発明を実現できる他の構成とすることもできる。例えば、バイアス磁石30とセンサ素子40との配置関係については、上述のように各磁気抵抗素子41〜48のピン磁性層の磁化方向とバイアス磁界Bbの方向との関係が維持できれば、どのような配置関係でも良い。
上記各実施形態で示された電流センサ10の構成は一例であり、上記で示した構成に限定されることなく、本発明を実現できる他の構成とすることもできる。例えば、バイアス磁石30とセンサ素子40との配置関係については、上述のように各磁気抵抗素子41〜48のピン磁性層の磁化方向とバイアス磁界Bbの方向との関係が維持できれば、どのような配置関係でも良い。
上記各実施形態では、センサ素子40の各磁気抵抗素子41〜48はTMR素子として構成されていたが、GMR素子として構成されていても良い。
上記各実施形態では、各増幅回路52、53が回路チップ50に設けられていたが、センサ素子40に設けられていても良い。この場合であっても、出力演算回路54は正弦波信号Vs及び余弦波信号Vcに対して所定の演算を行うことになる。
第4実施形態では、自己診断回路55は、自己診断異常時、一定範囲の通常状態出力電圧の最大値よりも高い電圧を出力していたが、一定範囲の通常状態出力電圧の最小値よりも低い電圧を出力するようにしても良い。
さらに、上記各実施形態では、電流センサ10は車載バッテリ等に接続されるバスバー80に流れる被検出電流Iを測定するように構成されていたが、これは電流センサ10の適用の一例である。したがって、測定対象は車両用のバスバー80に限られず、他の用途に用いられる配線に電流センサ10を適用しても良い。
30 バイアス磁石(磁界発生手段)
40 センサ素子
41〜48 磁気抵抗素子
54 出力演算回路
55 自己診断回路
58 ダイアグ端子
80 バスバー(被検出電流経路)
Bi 電流磁界(第1磁界)
Bb バイアス磁界(第2磁界)
40 センサ素子
41〜48 磁気抵抗素子
54 出力演算回路
55 自己診断回路
58 ダイアグ端子
80 バスバー(被検出電流経路)
Bi 電流磁界(第1磁界)
Bb バイアス磁界(第2磁界)
Claims (6)
- 被検出電流経路(80)に被検出電流が流れることによって生じる第1磁界(Bi)に対して垂直方向に第2磁界(Bb)を発生させる磁界発生手段(30)と、
複数の磁気抵抗素子(41〜48)を有し、前記複数の磁気抵抗素子(41〜48)が外部の磁場の影響を受けたときの前記複数の磁気抵抗素子(41〜48)の抵抗値の変化に基づいて、前記第2磁界(Bb)と、前記第1磁界(Bi)及び前記第2磁界(Bb)で構成される合成磁界(Bs)と、の成す角度θに応じた正弦値を含む正弦波信号及び余弦値を含む余弦波信号を出力するセンサ素子(40)と、
前記センサ素子(40)から前記正弦波信号及び前記余弦波信号を入力し、前記正弦波信号及び前記余弦波信号に対して所定の演算を行うことにより前記被検出電流の大きさに対応したセンサ信号を出力する出力演算回路(54)と、
を備え、さらに、
前記センサ素子(40)から前記正弦波信号及び前記余弦波信号を入力すると共に、前記正弦波信号及び前記余弦波信号に基づいて前記センサ素子(40)の故障判定を行う自己診断回路(55)を備えていることを特徴とする電流センサ。 - 前記正弦波信号をVsとし、前記余弦波信号をVcと定義すると、
前記自己診断回路(55)は、Vs2とVc2との和と、故障判定値と、を比較することにより、前記センサ素子(40)の故障判定を行うことを特徴とする請求項1に記載の電流センサ。 - 前記自己診断回路(55)は、前記正弦波信号及び前記余弦波信号によって描かれるリサージュ波形と、故障判定値と、を比較することにより、前記センサ素子(40)の故障判定を行うことを特徴とする請求項1に記載の電流センサ。
- 前記正弦波信号はsinθを含んだ信号であると共に、前記余弦波信号はcosθを含んだ信号であり、
前記自己診断回路(55)は、sinθと(1−cos2θ)1/2とを比較することにより、または、(1−sin2θ)1/2とcosθとを比較することにより、前記センサ素子(40)の故障判定を行うことを特徴とする請求項1に記載の電流センサ。 - 前記自己診断回路(55)の故障診断結果を外部に出力するダイアグ端子(58)を備えていることを特徴とする請求項1ないし4のいずれか1つに記載の電流センサ。
- 前記自己診断回路(55)は、前記センサ素子(40)が故障していると判定した場合、前記出力演算回路(54)の出力を変化させることを特徴とする請求項1ないし4のいずれか1つに記載の電流センサ。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013056098A JP2014181981A (ja) | 2013-03-19 | 2013-03-19 | 電流センサ |
| PCT/JP2014/001364 WO2014147996A1 (ja) | 2013-03-19 | 2014-03-11 | 電流センサ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013056098A JP2014181981A (ja) | 2013-03-19 | 2013-03-19 | 電流センサ |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2014181981A true JP2014181981A (ja) | 2014-09-29 |
Family
ID=51579696
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013056098A Pending JP2014181981A (ja) | 2013-03-19 | 2013-03-19 | 電流センサ |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP2014181981A (ja) |
| WO (1) | WO2014147996A1 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018017553A (ja) * | 2016-07-26 | 2018-02-01 | 株式会社デンソー | 電流センサ |
| WO2020054112A1 (ja) * | 2018-09-12 | 2020-03-19 | アルプスアルパイン株式会社 | 磁気センサおよび電流センサ |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015045529A (ja) | 2013-08-27 | 2015-03-12 | Tdk株式会社 | 回転磁界センサ |
| CN116086502A (zh) * | 2023-01-09 | 2023-05-09 | 朱珩予 | 一种正弦波传感器电路 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006105932A (ja) * | 2004-10-08 | 2006-04-20 | Toyota Motor Corp | ブリッジ回路を有するセンサの故障判定装置およびその故障判定方法 |
| JP2007155399A (ja) * | 2005-12-01 | 2007-06-21 | Tokai Rika Co Ltd | 電流センサ、及び、それを有する電流値算出システム |
| JP2008134215A (ja) * | 2006-10-30 | 2008-06-12 | Hitachi Ltd | Gmr素子を用いた変位センサ,gmr素子を用いた角度検出センサ及びそれらに用いる半導体装置 |
| JP2012137457A (ja) * | 2010-12-28 | 2012-07-19 | Hitachi Automotive Systems Ltd | 磁界角計測装置,回転角計測装置およびそれを用いた回転機,システム,車両および車両駆動装置 |
| JP2012149999A (ja) * | 2011-01-19 | 2012-08-09 | Alps Electric Co Ltd | 自己診断可能な電子回路及び磁界検出装置 |
-
2013
- 2013-03-19 JP JP2013056098A patent/JP2014181981A/ja active Pending
-
2014
- 2014-03-11 WO PCT/JP2014/001364 patent/WO2014147996A1/ja not_active Ceased
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006105932A (ja) * | 2004-10-08 | 2006-04-20 | Toyota Motor Corp | ブリッジ回路を有するセンサの故障判定装置およびその故障判定方法 |
| JP2007155399A (ja) * | 2005-12-01 | 2007-06-21 | Tokai Rika Co Ltd | 電流センサ、及び、それを有する電流値算出システム |
| JP2008134215A (ja) * | 2006-10-30 | 2008-06-12 | Hitachi Ltd | Gmr素子を用いた変位センサ,gmr素子を用いた角度検出センサ及びそれらに用いる半導体装置 |
| JP2012137457A (ja) * | 2010-12-28 | 2012-07-19 | Hitachi Automotive Systems Ltd | 磁界角計測装置,回転角計測装置およびそれを用いた回転機,システム,車両および車両駆動装置 |
| JP2012149999A (ja) * | 2011-01-19 | 2012-08-09 | Alps Electric Co Ltd | 自己診断可能な電子回路及び磁界検出装置 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018017553A (ja) * | 2016-07-26 | 2018-02-01 | 株式会社デンソー | 電流センサ |
| WO2018021082A1 (ja) * | 2016-07-26 | 2018-02-01 | 株式会社デンソー | 電流センサ |
| WO2020054112A1 (ja) * | 2018-09-12 | 2020-03-19 | アルプスアルパイン株式会社 | 磁気センサおよび電流センサ |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2014147996A1 (ja) | 2014-09-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6033529B2 (ja) | 検出装置および電流センサ | |
| US9007054B2 (en) | Angle sensor with misalignment detection and correction | |
| JP5648246B2 (ja) | 電流センサ | |
| US8896295B2 (en) | Magnetic field sensor having multiple sensing elements and a programmable misalignment adjustment device for misalignment detection and correction in current sensing and other applications | |
| CN102483443B (zh) | 磁场传感器 | |
| EP2284554B1 (en) | Magnetic sensor with bridge circuit including magnetoresistance effect elements | |
| US9638767B2 (en) | Current sensor and attachment structure of the same | |
| US10060953B2 (en) | Current sensor | |
| US9851221B2 (en) | Hall sensor insensitive to external magnetic fields | |
| CN111308154A (zh) | 电流传感器 | |
| CN113376422A (zh) | 用于改善功能安全性的电流传感器 | |
| CN113495183A (zh) | 电流传感器及其制造方法、电控制装置、以及电流传感器的设计方法 | |
| CN114424070A (zh) | 差分信号电流传感器 | |
| JP6384677B2 (ja) | 電流センサ | |
| JP2014181981A (ja) | 電流センサ | |
| WO2016056135A1 (ja) | 電流検出装置、及び電流検出方法 | |
| JP5678287B2 (ja) | 電流センサ | |
| JP6624207B2 (ja) | 電流検出装置及び補正係数算出方法 | |
| WO2012046547A1 (ja) | 電流センサ | |
| US12352831B2 (en) | Dual current magnetic field sensor | |
| JP2023084140A (ja) | 磁気センサ装置、インバータ装置、バッテリ装置、電動モータおよび車両 | |
| JP5487403B2 (ja) | 電流センサ | |
| CN110073230B (zh) | 磁传感器 | |
| JP5432082B2 (ja) | 電流検知器を備えた半導体装置 | |
| JP7850696B2 (ja) | 磁気センサ装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150420 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160126 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20160524 |