JP2014189256A - 車両駆動システム - Google Patents
車両駆動システム Download PDFInfo
- Publication number
- JP2014189256A JP2014189256A JP2013069636A JP2013069636A JP2014189256A JP 2014189256 A JP2014189256 A JP 2014189256A JP 2013069636 A JP2013069636 A JP 2013069636A JP 2013069636 A JP2013069636 A JP 2013069636A JP 2014189256 A JP2014189256 A JP 2014189256A
- Authority
- JP
- Japan
- Prior art keywords
- slip
- vehicle
- slip point
- wheel
- drive
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images


















Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
Landscapes
- Arrangement And Driving Of Transmission Devices (AREA)
- Hybrid Electric Vehicles (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
Abstract
【解決手段】前輪Wf又は後輪Wrに超過スリップが発生したことを取得するスリップ取得部61と、超過スリップが発生したことを取得していないことに基づいて、減算スリップポイントを時間離散的に算出する減算スリップポイント算出部69と、減算スリップポイントを積算し積算スリップポイントを経時的に算出する積算スリップポイント算出部63と、積算スリップポイントに基づいて2WDとAWDとを切り替える駆動状態切替部64と、を備える車両駆動システム10である。
【選択図】図7
Description
本発明の車両駆動システムでは、前記制御装置は、前記第1駆動輪又は前記第2駆動輪に所定以上のスリップである超過スリップが発生したことを取得するスリップ取得手段(例えば、後述のスリップ取得部61)と、前記超過スリップが発生したことを前記スリップ取得手段が取得していないことに基づいて、減算スリップポイントを時間離散的に算出する減算スリップポイント算出手段(例えば、後述の減算スリップポイント算出部69)と、前記減算スリップポイントを積算し、積算スリップポイントを経時的に算出する積算スリップポイント算出手段(例えば、後述の積算スリップポイント算出部63)と、前記積算スリップポイントに基づいて、前記第1駆動輪と前記第2駆動輪との双方で前記車両を駆動する双方輪駆動状態(AWD)と、前記第1駆動輪と前記第2駆動輪のうちいずれか一方のみで前記車両を駆動する一方輪単独駆動状態(2WD)と、を切り替える駆動状態切替手段(例えば、後述の駆動状態切替部64)と、を備えることを特徴とする。
これにより、スリップが発生していない状況を考慮して、AWDと2WDとの切り替えができる。そのため、一旦スリップが発生した後に、明らかに路面が高μ状態でAWDが不要な状態となった場合には、速やかにAWDから2WDへの切り替えができる。従って、より適切なタイミングで車両の駆動状態の切り替えを行うことができるため、AWD継続時間を減少でき、駆動効率を向上できる。
また、本発明によれば、車両の駆動状態の切替制御にポイント制を採用することで、異なる物理量(例えば、スリップ量、駆動力、時間等)を同一の基準に並べ直して計算・管理できる。
これにより、従来のような単純な時間経過に基づいた駆動状態遷移ではなく、スリップ不発生時の駆動輪の駆動力に基づいたポイントの算出及び積算による駆動状態遷移とすることができる。従って、より適切なタイミングで車両の駆動状態の切り替えを行うことができるため、AWD継続時間を減少でき、駆動効率を向上できる。
これにより、駆動力相関値が大きく、明らかに路面が高μ状態でAWDが不要な状態となった場合に、速やかにAWDから2WDへの切り替えができる。従って、より適切なタイミングで車両の駆動状態の切り替えを確実に行うことができるため、AWD継続時間をより減少でき、駆動効率をより向上できる。
これにより、従来のような単純な時間経過に基づいた駆動状態遷移ではなく、スリップ不発生継続時間に基づいたポイントの算出及び積算による駆動状態遷移とすることができる。従って、より適切なタイミングで車両の駆動状態の切り替えを行うことができるため、AWD継続時間を減少でき、駆動効率を向上できる。
これにより、従来のような単純な時間経過に基づいた駆動状態遷移ではなく、スリップ不発生時の車両に生じている横加速度に基づいたポイントの算出及び積算による駆動状態遷移とすることができる。従って、より適切なタイミングで車両の駆動状態の切り替えを行うことができるため、AWD継続時間を減少でき、駆動効率を向上できる。
これにより、横加速度相関値が大きく、明らかに路面が高μ状態でAWDが不要な状態となった場合に、速やかにAWDから2WDへの切り替えができる。従って、より適切なタイミングで車両の駆動状態の切り替えを確実に行うことができるため、AWD継続時間をより減少でき、駆動効率をより向上できる。
これにより、従来のような単純な時間経過に基づいた駆動状態遷移ではなく、スリップ不発生時の車速に基づいたポイントの算出及び積算による駆動状態遷移とすることができる。従って、より適切なタイミングで車両の駆動状態の切り替えを行うことができるため、AWD継続時間を減少でき、駆動効率を向上できる。
これにより、車速相関値が小さいときは、仮にスリップが発生したとしても車両の挙動が大きく乱れることはないため、速やかにAWDから2WDへの切り替えができる。従って、より適切なタイミングで車両の駆動状態の切り替えを確実に行うことができるため、AWD継続時間をより減少でき、駆動効率をより向上できる。
ここで、一般的に車両は、2WD、AWDの順に、車両安定性が増す一方で駆動効率が悪化する。これに対してこの発明によれば、より適切なタイミングで2WDとAWDを切り替えできるため、車両安定性を確保できるとともに、駆動効率をさらに向上できる。
これにより、より適切なタイミングで2WDへの切り替えを禁止できるため、車両安定性をより確保できる。
ここで、一般的に車両は、RWD、FWD、AWDの順に車両安定性が増す一方で、2WD(RWD、FWD)、AWDの順に、駆動効率が悪化する。これに対してこの発明によれば、より適切なタイミングでRWD、FWD及びAWDを切り替えることができるため、車両安定性をより確保できるとともに、駆動効率をさらに向上できる。
ここで、上述した通り一般的に車両は、RWD、FWD、AWDの順に車両安定性が増す一方で、2WD(RWD、FWD)、AWDの順に、駆動効率が悪化する。これに対してこの発明によれば、より適切なタイミングでFWDやRWDへの切り替えを禁止できるため、車両安定性をより確保できるとともに、駆動効率をさらに向上できる。
これにより、さらに適切なタイミングで車両の駆動状態の切り替えを行うことでき、駆動効率をさらに向上できる。
[第1実施形態]
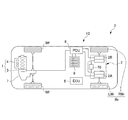
図1は、本発明の第1実施形態に係る車両駆動システムを搭載した車両を示す図である。本実施形態に係る車両駆動システム10を搭載した車両3は、ハイブリッド車両である。図1に示すように、車両3に搭載された車両駆動システム10は、第1駆動装置1と、第2駆動装置2と、これらの駆動装置を制御する制御装置としての電子制御ユニット(以下、「ECU」という。)6と、PDU(パワードライブユニット)8と、バッテリ9と、を備える。
図2は、本実施形態に係る第2駆動装置2の縦断面図である。図3は、図2に示す第2駆動装置2の部分拡大図である。図2及び図3に示すように、第2駆動装置2は、車両3の各後輪RWr,LWrに駆動力を伝える出力軸10A,10Bを有し、各々、車幅方向に同軸上に配置される。これら出力軸10A,10Bは、各後輪RWr,LWrの車軸に接続される。減速機ケース11の内部には、出力軸10A,10Bを駆動する電動機2A,2Bと、電動機2A,2Bの駆動回転を減速する遊星歯車式減速機12A,12Bとが、出力軸10A,10Bと同軸上に配置される。
ピストン37は、減速機ケース11と支持壁39と円筒状支持部42間に形成された環状のシリンダ室38に進退自在に収容されており、シリンダ室38への高圧オイルの導入によってピストン37を前進させ、シリンダ室38からオイルを排出することによってピストン37を後退させる。油圧ブレーキ60はオイルポンプに接続される。
なお、油圧ブレーキ60及びピストン37の詳細については、特開2010−235051号公報を参照されたい。
一方向クラッチ50は、車両3が電動機2A,2Bの駆動力で前進走行する際に係合してリングギヤ24A,24Bの回転をロックするように構成される。より具体的には、一方向クラッチ50は、リングギヤ24A,24Bに作用するトルクの作用方向によってリングギヤ24A,24Bをロック又は切り離すように構成され、車両3が前進する際のサンギヤ21A,21Bの回転方向を正転方向とするとリングギヤ24A,24Bに逆転方向のトルクが作用する場合に、リングギヤ24A,24Bの回転をロックする。
図4は、車両の走行状態における電動機2A,2Bの状態と切離機構(一方向クラッチ50と油圧ブレーキ60)の状態を示す図である。図4におけるフロントは前輪Wf,Wfを駆動する第1駆動装置1を表し、リアは後輪Wr(RWr,LWr)を駆動する第2駆動装置2を表し、○が作動(駆動、回生含む)を意味し、×が非作動(停止)を意味する。また、MOT状態は第2駆動装置2の電動機2A,2Bの状態を表す。さらに、切離機構のONはリングギヤ24A,24Bがロックされることを意味し、OFFはリングギヤ24A,24Bがフリー状態であることを意味する。また、OWCは一方向クラッチ50を意味し、BRKは油圧ブレーキ60を意味する。
次いで、キーポジションをONにした後、EV発進時は、第2駆動装置2の電動機2A,2Bが駆動する。このとき、切離機構は一方向クラッチ50によりロックされ、電動機2A,2Bの動力が後輪RWr,LWrに伝達される。
続いて加速時には、第1駆動装置1と第2駆動装置2いずれも駆動する双方輪(4輪)駆動状態(AWD)となり、このときも、切離機構は一方向クラッチ50によりロックされ、電動機2A,Bの動力が後輪RWr、LWrに伝達される。
低・中速域のEVクルーズでは、モータ効率が良いため第1駆動装置1が非作動状態で、第2駆動装置2のみが駆動する後輪単独駆動状態(RWD)となる。このときも、切離機構は一方向クラッチ50によりロックされ、電動機2A,2Bの動力が後輪RWr,LWrに伝達される。
また、自然減速する場合も、切離機構の一方向クラッチ50が切り離される(OWCフリー)とともに油圧ブレーキ60を作動しないため、電動機2A,2Bは停止する。
通常走行では、摩擦ブレーキに対する制動制御と協調して電動機2A,2Bで回生して走行エネルギーを回収するが、緊急制動の要求(例えば、ABS作動時)には、電動機2A,2Bの回生を禁止して、摩擦ブレーキによる制動制御を優先する。この場合、一方向クラッチ50は切り離された状態(OWCフリー)となり、油圧ブレーキ60を作動させないことで、電動機2A,2Bを停止させる。
ECU6は、各種センサからの入力信号波形を整形し、電圧レベルを所定のレベルに修正し、アナログ信号値をデジタル信号値に変換する等の機能を有する入力回路と、中央演算処理ユニット(以下、「CPU」という。)と、を備える。この他、ECU6は、CPUで実行される各種演算プログラム及び演算結果等を記憶する記憶回路と、PDU8や内燃機関4等に制御信号を出力する出力回路と、を備える。
また、ECU6は、駆動状態切替制御を実行するためのモジュールとして、スリップ取得部61と、加減スリップポイント算出部62と、積算スリップポイント算出部63と、駆動状態切替部64と、安定走行判定部65と、を備える。以下、各モジュールの機能について説明する。
ここで、車両3は、高μ状態の乾燥路においても常に駆動輪に微小なスリップを発生させながら走行しているとみなすこともできる。そのため、本実施形態における「超過スリップ」とは、このような微小なスリップを除外するものである。以下、超過スリップの発生を、単にスリップの発生ともいう。
図6に示すように、加減スリップポイント算出部62は、超過スリップが発生したことをスリップ取得部61が取得したとき、即ちスリップ判定フラグが「1」のときに、超過スリップが発生した駆動輪の駆動力に相関のある駆動力相関値に基づいて、加減スリップポイントを算出する。
ここで、駆動力相関値としては、例えば、車輪(一輪)駆動力、車輪(一輪)トルク、車輪を駆動する第1駆動装置1及び第2駆動装置2の駆動力、車輪を駆動する第1駆動装置1及び第2駆動装置2のトルクが挙げられるが、以下では車輪(一輪)駆動力を例に挙げて説明する。
また、加減スリップポイント算出部62は、スリップ判定フラグが「0」のときに、減算スリップポイント算出部69でマイナス値の減算スリップポイントを算出し、算出された減算スリップポイントを積算スリップポイント算出部63に送信する。
ここで、本明細書において一輪駆動力とは、車両3の4輪それぞれの駆動力のうち、最大の駆動力を意味する。一輪駆動力は、センサにより検出される他、例えば、アクセル開度センサ92により検出されたアクセル開度、エンジン回転数センサ93により検出されたエンジン回転数、電動機5,2A,2Bそれぞれに設けられたモータ電流センサ94により検出された各モータ電流等に基づいて推定されて、取得される。
また、第1閾値は、双方輪駆動状態(AWD)と一方輪単独駆動状態(2WD)との切り替えの指標として、適切な値に予め設定される。なお、この第1閾値は、後述の第2閾値よりも大きな値に設定される。
具体的には、駆動状態切替部64は、積算スリップポイントが第1閾値以上であるときに、スリップAWD要求フラグを「1」に設定し、車両3の駆動状態を双方輪駆動状態(AWD)に切り替える。また、駆動状態切替部64は、積算スリップポイントが第1閾値未満であり、且つ後述の安定走行判定フラグが「1」のときに、スリップAWD要求フラグを「0」に設定し、車両3の駆動状態を一方輪単独駆動状態(2WD)に切り替える。
ここで、第2閾値は、前輪単独駆動状態(FWD)と後輪単独駆動状態(RWD)との切り替えの指標として、適切な値に予め設定される。なお、この第2閾値は、上述の第1閾値よりも小さな値に設定される。
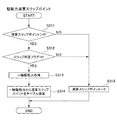
図7は、本実施形態に係る駆動状態切替制御の手順を示すフローチャートである。この制御処理は、ECU6で繰り返し実行される。
ステップS21では、スリップ判定フラグが「1」であるか否かを判別する。この判別がYESの場合にはステップS22に進み、NOの場合にはステップS26に進んで加算スリップポイントを「0」にリセットし、本処理を終了する。
図9に示すように、駆動力加算スリップポイント算出テーブルは、第1閾値を超えない範囲で、スリップ発生時の一輪駆動力が低駆動力であるほど、駆動力加算スリップポイントが比例して大きくなるように設定される。これは、スリップが発生している場合において、一輪駆動力が低駆動力であるほど路面が低μ状態であることから、駆動力加算スリップポイントをより大きく設定することで、AWDに早期に切り替えるため、又はAWD走行時間を長く確保するためである。ただし、一輪駆動力がある程度高くなると、駆動力加算スリップポイントが一定となるように設定される。
図10に示すように、時間加算スリップポイント算出テーブルは、時間加算スリップポイントの積算値が第1閾値を超えるまでは、スリップ発生継続時間が長いほど時間加算スリップポイントが大きくなるように設定される。これは、スリップ発生継続時間が短過ぎる場合にはスリップ誤判定の可能性があることから、時間加算スリップポイントをより小さく設定することで、路面が高μ状態であるにも関わらず無駄にAWDに切り替えてしまうのを回避するためである。
なお、双方輪駆動状態(AWD)要求応答時間内となるように、スリップ発生継続時間に応じた時間加算スリップポイントが設定される。
また、時間加算スリップポイントの積算値が第1閾値を超えた後は、ほぼ0の時間加算スリップポイントが継続して算出され、時間加算スリップポイントの積算値が一定となるように設定される。これは、時間加算スリップポイントの積算値が第1閾値を過大に超えてしまうと、双方輪駆動状態(AWD)の継続時間が長過ぎてしまい、駆動効率(燃費、電費)が悪化するためである。
ステップS311では、積算スリップポイントが0よりも大きいか否かを判別する。この判別がYESで積算スリップポイントが溜まった状態である場合には、ステップS312に進む。この判別がNOで積算スリップポイントが溜まっていない状態である場合には、ステップS315に進んで減算スリップポイントを0とし、本処理を終了する。これにより、積算スリップポイントが0のときに、減算スリップポイントとして0しか算出しないため、積算スリップポイントがマイナス値となるのが回避される。
図12に示すように、駆動力減算スリップポイント算出テーブルは、スリップ不発生時の一輪駆動力が所定値未満では、駆動力減算スリップポイントが0となるように設定され、所定値以上では、絶対値が比較的大きな一定の駆動力減算スリップポイントとなるように設定される。これは、スリップが発生していない場合において、一輪駆動力が高駆動力であるほど路面が確実に高μ状態であることから、駆動力減算スリップポイントをより大きく設定することで、不要なAWD走行を回避するためである。また、低μ状態であるにも関わらず2WDへの切り替えを実行してしまうのを回避するためである。
ステップS321では、積算スリップポイントが0よりも大きいか否かを判別する。この判別がYESで積算スリップポイントが溜まった状態である場合には、ステップS322に進む。この判別がNOで積算スリップポイントが溜まっていない状態である場合には、ステップS325に進んでスリップ不発生継続時間カウンタ値SNT_CNTを0にリセットするとともに、減算スリップポイントを0とし、本処理を終了する。これにより、積算スリップポイントが0のときに、減算スリップポイントとして0しか算出しないため、積算スリップポイントがマイナス値となるのが回避される。
図14に示すように、時間減算スリップポイント算出テーブルは、スリップ不発生継続時間によらず、絶対値が比較的小さな一定の時間減算スリップポイントとなるように設定される。これは、スリップ不発生継続時間に伴って、徐々に積算スリップポイントを減少させるためである。
ステップS331では、積算スリップポイントが0よりも大きいか否かを判別する。この判別がYESで積算スリップポイントが溜まった状態である場合には、ステップS332に進む。この判別がNOで積算スリップポイントが溜まっていない状態である場合には、ステップS334に進んで減算スリップポイントを0とし、本処理を終了する。これにより、積算スリップポイントが0のときに、減算スリップポイントとして0しか算出しないため、積算スリップポイントがマイナス値となるのが回避される。
図16に示すように、横G減算スリップポイント算出テーブルは、スリップ不発生時の横Gが所定値未満では横G減算スリップポイントが0となるように設定され、所定値以上では絶対値が比較的大きな一定の横G減算スリップポイントとなるように設定される。これは、スリップが発生していない場合において、横Gが大きいほど路面が確実に高μ状態であることから、横G減算スリップポイントをより大きく設定することで、不要なAWD走行を回避するためである。また、低μ状態であるにも関わらず2WDへの切り替えを実行してしまうのを回避するためである。
ステップS341では、積算スリップポイントが0よりも大きいか否かを判別する。この判別がYESで積算スリップポイントが溜まった状態である場合には、ステップS342に進む。この判別がNOで積算スリップポイントが溜まっていない状態である場合には、ステップS344に進んで減算スリップポイントを0とし、本処理を終了する。これにより、積算スリップポイントが0のときに、減算スリップポイントとして0しか算出しないため、積算スリップポイントがマイナス値となるのが回避される。
図18に示すように、車速減算スリップポイント算出テーブルは、スリップ不発生時の車速が所定値未満では絶対値が比較的大きな一定の車速減算スリップポイントとなるように設定され、所定値以上では車速減算スリップポイントが0となるように設定される。これは、車速が所定値未満の低車速では仮にスリップが発生した場合でも車両の挙動を大きく乱すことが無いので、車速減算スリップポイントの絶対値を比較的大きな一定の値とし、高車速では反対に車速減算スリップポイントを0とすることで、AWDから2WDへの切り替えをより適切なタイミングで実行するためである。
図19において、「積算スリップポイント」の行における+側(図19における上側)の棒グラフは加算スリップポイントを表し、−側(図19における下側)の棒グラフは減算スリップポイントを表し、折れ線グラフは積算スリップポイントを表している。
本実施形態では、スリップが発生していないことに基づいて減算スリップポイントを算出する。そして、減算スリップポイントを積算し、経時的に算出された積算スリップポイントに基づいて、双方輪駆動状態(AWD)と一方輪単独駆動状態(2WD)とを切り替える。
これにより、スリップが発生していない状況を考慮して、AWDと2WDとの切り替えができる。そのため、一旦スリップが発生した後に、明らかに路面が高μ状態でAWDが不要な状態となった場合には、速やかにAWDから2WDへの切り替えができる。従って、より適切なタイミングで車両の駆動状態の切り替えを行うことができるため、AWD継続時間を減少でき、駆動効率を向上できる。
また、本実施形態によれば、車両3の駆動状態の切替制御にポイント制を採用することで、異なる物理量(例えば、スリップ量、駆動力、時間等)を同一の基準に並べ直して計算・管理できる。
これにより、従来のような単純な時間経過に基づいた駆動状態遷移ではなく、スリップ不発生時の駆動輪の駆動力に基づいたポイントの算出及び積算による駆動状態遷移とすることができる。従って、より適切なタイミングで車両の駆動状態の切り替えを行うことができるため、AWD継続時間を減少でき、駆動効率を向上できる。
これにより、駆動力相関値が大きく、明らかに路面が高μ状態でAWDが不要な状態となった場合に、速やかにAWDから2WDへの切り替えができる。従って、より適切なタイミングで車両の駆動状態の切り替えを確実に行うことができるため、AWD継続時間をより減少でき、駆動効率をより向上できる。
これにより、従来のような単純な時間経過に基づいた駆動状態遷移ではなく、スリップ不発生継続時間に基づいたポイントの算出及び積算による駆動状態遷移とすることができる。従って、より適切なタイミングで車両の駆動状態の切り替えを行うことができるため、AWD継続時間を減少でき、駆動効率を向上できる。
これにより、従来のような単純な時間経過に基づいた駆動状態遷移ではなく、スリップ不発生時の車両に生じている横加速度に基づいたポイントの算出及び積算による駆動状態遷移とすることができる。従って、より適切なタイミングで車両の駆動状態の切り替えを行うことができるため、AWD継続時間を減少でき、駆動効率を向上できる。
これにより、横加速度相関値が大きく、明らかに路面が高μ状態でAWDが不要な状態となった場合に、速やかにAWDから2WDへの切り替えができる。従って、より適切なタイミングで車両の駆動状態の切り替えを確実に行うことができるため、AWD継続時間をより減少でき、駆動効率をより向上できる。
これにより、従来のような単純な時間経過に基づいた駆動状態遷移ではなく、スリップ不発生時の車速に基づいたポイントの算出及び積算による駆動状態遷移とすることができる。従って、より適切なタイミングで車両の駆動状態の切り替えを行うことができるため、AWD継続時間を減少でき、駆動効率を向上できる。
これにより、車速相関値が小さいときは、仮にスリップが発生したとしても車両の挙動が大きく乱れることはないため、速やかにAWDから2WDへの切り替えができる。従って、より適切なタイミングで車両の駆動状態の切り替えを確実に行うことができるため、AWD継続時間をより減少でき、駆動効率をより向上できる。
ここで、一般的に車両は、2WD、AWDの順に、車両安定性が増す一方で駆動効率が悪化する。これに対して本実施形態によれば、より適切なタイミングで2WDとAWDを切り替えできるため、車両安定性を確保できるとともに、駆動効率をさらに向上できる。
これにより、より適切なタイミングで2WDへの切り替えを禁止できるため、車両安定性をより確保できる。
ここで、一般的に車両は、RWD、FWD、AWDの順に車両安定性が増す一方で、2WD(RWD、FWD)、AWDの順に、駆動効率が悪化する。これに対してこの発明によれば、より適切なタイミングでRWD、FWD及びAWDを切り替えることができるため、車両安定性をより確保できるとともに、駆動効率をさらに向上できる。
ここで、上述した通り一般的に車両は、RWD、FWD、AWDの順に車両安定性が増す一方で、2WD(RWD、FWD)、AWDの順に、駆動効率が悪化する。これに対してこの発明によれば、より適切なタイミングでFWDやRWDへの切り替えを禁止できるため、車両安定性をより確保できるとともに、駆動効率をさらに向上できる。
これにより、さらに適切なタイミングで車両の駆動状態の切り替えを行うことでき、駆動効率をさらに向上できる。
これにより、従来のように単純にスリップ量の積算値に応じて駆動状態を切り替えるのではなく、スリップが発生した駆動輪の駆動力に基づいて駆動状態を切り替えるため、より適切なタイミングで車両3の駆動状態を切り替えることができる。
例えば、スリップ量が同一である場合、低駆動力でスリップが発生したときの方が路面がより低μ状態である可能性が高い。これに対して本実施形態によれば、スリップが発生した駆動輪の駆動力に応じて駆動状態を切り替えることができるため、路面が低μ状態でAWDが必要な状態であるにも関わらずAWDから2WDへの切り替えを行うのを抑制でき、車両安定性を確保できる。
また、スリップ量が同一である場合、高駆動力でスリップが発生したときの方が路面がより高μ状態である可能性が高い。これに対して本実施形態によれば、スリップが発生した駆動輪の駆動力に応じて駆動状態を切り替えることができるため、路面が高μ状態でAWDが不要な状態であるにも関わらず2WDからAWDへの切り替えを行うのを抑制できるとともに、AWDを無駄に長時間継続するのを抑制でき、駆動効率を向上できる。
本発明の第2実施形態に係る車両駆動システムは、第1実施形態に係る車両駆動システム10と比べて、駆動状態切替部の構成のみが異なる。
具体的には、本実施形態に係る駆動状態切替部は、積算スリップポイントが第1閾値以上であるときに、2WD禁止要求フラグを「1」に設定し、一方輪単独駆動状態(2WD)、即ち前輪単独駆動状態(FWD)及び後輪単独駆動状態(RWD)への切り替えを禁止する。これにより、車両3の駆動状態は双方輪駆動状態(AWD)となる。
また、本実施形態に係る駆動状態切替部は、積算スリップポイントが第1閾値未満であり、且つ安定走行判定フラグが「1」のときに、2WD禁止要求フラグを「0」に設定し、一方輪単独駆動状態(2WD)、即ち前輪単独駆動状態(FWD)及び後輪単独駆動状態(RWD)への切り替えを許容する。これにより、前輪単独駆動状態(FWD)又は後輪単独駆動状態(RWD)への切り替えが実行される。
本実施形態に係る駆動状態切替制御は、第1実施形態に係る駆動状態切替制御のステップS6、7及び10を、それぞれステップS6A、7A及び10Aに変更した以外は、同一の処理内容となっている。
より詳しくは、本実施形態では、積算スリップポイントが第1閾値以上であるときには、一方輪単独駆動状態(2WD)への切り替えを禁止する。これにより、より適切なタイミングで2WDへの切り替えを禁止できるため、車両安定性をより確保できる。
例えば、上記実施形態における加算スリップポイント算出部68では、スリップが発生したことをスリップ取得部61が取得したことに基づいて、加算スリップポイントを時間離散的に算出したが、これに限定されない。例えば、スリップ発生時に一度だけ、加算スリップポイントを設定して取得するようにしてもよい。
また、上記実施形態では、後輪側の第2駆動装置2を2つの電動機2A,2Bを具備する2モータ方式としたが、1モータ方式であってもよい。
2…第2駆動装置
2A,2B…電動機
3…車両
4…内燃機関
5…電動機
6…ECU(制御装置、スリップ取得手段、減算スリップポイント算出手段、積算スリップポイント算出手段、駆動状態切替手段、加算スリップポイント取得手段)
7…トランスミッション
8…PDU
9…バッテリ
10…車両駆動システム
Claims (14)
- 車両の前輪及び後輪のいずれか一方である第1駆動輪を駆動する第1駆動装置と、
前記車両の前輪及び後輪のいずれか他方である第2駆動輪を駆動する第2駆動装置と、
前記第1駆動装置及び前記第2駆動装置を制御し、前記第1駆動輪及び前記第2駆動輪の駆動状態を制御する制御装置と、を備える車両駆動システムであって、
前記制御装置は、
前記第1駆動輪又は前記第2駆動輪に所定以上のスリップである超過スリップが発生したことを取得するスリップ取得手段と、
前記超過スリップが発生したことを前記スリップ取得手段が取得していないことに基づいて、減算スリップポイントを時間離散的に算出する減算スリップポイント算出手段と、
前記減算スリップポイントを積算し、積算スリップポイントを経時的に算出する積算スリップポイント算出手段と、
前記積算スリップポイントに基づいて、前記第1駆動輪と前記第2駆動輪との双方で前記車両を駆動する双方輪駆動状態と、前記第1駆動輪と前記第2駆動輪のうちいずれか一方のみで前記車両を駆動する一方輪単独駆動状態と、を切り替える駆動状態切替手段と、を備えることを特徴とする車両駆動システム。 - 請求項1に記載の車両駆動システムにおいて、
前記減算スリップポイント算出手段は、前記超過スリップが発生したことを前記スリップ取得手段が取得していないときに、前記超過スリップが発生したことを取得されていない駆動輪の駆動力に相関のある駆動力相関値に基づいて、前記減算スリップポイントを算出することを特徴とする車両駆動システム。 - 請求項2に記載の車両駆動システムにおいて、
前記減算スリップポイント算出手段は、前記駆動力相関値が大きいときに、前記駆動力相関値が小さいときに比べて大きな前記減算スリップポイントを算出することを特徴とする車両駆動システム。 - 請求項1から3いずれかに記載の車両駆動システムにおいて、
前記減算スリップポイント算出手段は、前記超過スリップが発生したことを前記スリップ取得手段が取得していないときに、該取得していない状況が継続されたときの継続時間である不発生継続時間に基づいて、前記減算スリップポイントを算出することを特徴とする車両駆動システム。 - 請求項1から4いずれかに記載の車両駆動システムにおいて、
前記減算スリップポイント算出手段は、前記超過スリップが発生したことを前記スリップ取得手段が取得していないときに、前記車両に生じている横加速度に相関のある横加速度相関値に基づいて、前記減算スリップポイントを算出することを特徴とする車両駆動システム。 - 請求項5に記載の車両駆動システムにおいて、
前記減算スリップポイント算出手段は、前記横加速度相関値が大きいときに、前記横加速度相関値が小さいときに比べて大きな前記減算スリップポイントを算出することを特徴とする車両駆動システム。 - 請求項1から6いずれかに記載の車両駆動システムにおいて、
前記減算スリップポイント算出手段は、前記超過スリップが発生したことを前記スリップ取得手段が取得していないときに、車速に相関のある車速相関値に基づいて、前記減算スリップポイントを算出することを特徴とする車両駆動システム。 - 請求項7に記載の車両駆動システムにおいて、
前記減算スリップポイント算出手段は、前記車速相関値が小さいときに、前記車速相関値が大きいときに比べて大きな前記減算スリップポイントを算出することを特徴とする車両駆動システム。 - 請求項1から8いずれかに記載の車両駆動システムにおいて、
前記駆動状態切替手段は、前記積算スリップポイントが第1閾値以上であるときに前記双方輪駆動状態に切り替え、前記積算スリップポイントが前記第1閾値未満であるときに前記一方輪単独駆動状態に切り替えることを特徴とする車両駆動システム。 - 請求項1から8いずれかに記載の車両駆動システムにおいて、
前記駆動状態切替手段は、前記積算スリップポイントが第1閾値以上であるときに、前記一方輪単独駆動状態への切り替えを禁止することを特徴とする車両駆動システム。 - 請求項1から8いずれかに記載の車両駆動システムにおいて、
前記前輪を前記第1駆動輪とし、前記後輪を前記第2駆動輪としたときに、
前記駆動状態切替手段は、前記積算スリップポイントに基づいて、前記前輪のみで前記車両を駆動する前輪単独駆動状態と、前記後輪のみで前記車両を駆動する後輪単独駆動状態と、前記前輪と前記後輪との双方で前記車両を駆動する双方輪駆動状態と、を切り替えるものであり、且つ、
前記積算スリップポイントが第1閾値以上であるときに前記双方輪駆動状態に切り替え、前記積算スリップポイントが前記第1閾値より小さい第2閾値以上且つ前記第1閾値未満であるときに前記前輪単独駆動状態に切り替え、前記積算スリップポイントが前記第2閾値未満であるときに前記後輪単独駆動状態に切り替えることを特徴とする車両駆動システム。 - 請求項1から8いずれかに記載の車両駆動システムにおいて、
前記前輪を前記第1駆動輪とし、前記後輪を前記第2駆動輪としたときに、
前記駆動状態切替手段は、前記積算スリップポイントに基づいて、前記前輪のみで前記車両を駆動する前輪単独駆動状態と、前記後輪のみで前記車両を駆動する後輪単独駆動状態と、前記前輪と前記後輪との双方で前記車両を駆動する双方輪駆動状態と、を切り替えるものであり、且つ、
前記積算スリップポイントが第1閾値以上であるときに、前記前輪単独駆動状態及び前記後輪単独駆動状態への切り替えを禁止し、前記積算スリップポイントが前記第1閾値よりも小さい第2閾値以上であるときに、前記後輪単独駆動状態への切り替えを禁止することを特徴とする車両駆動システム。 - 請求項11又は12に記載の車両駆動システムにおいて、
前記第1駆動装置は駆動源として内燃機関を備え、
前記第2駆動装置は駆動源として電動機のみを備えることを特徴とする車両駆動システム。 - 請求項1から13いずれかに記載の車両駆動システムにおいて、
前記制御装置は、前記超過スリップが発生したことを前記スリップ取得手段が取得したことに基づいて、加算スリップポイントを取得する加算スリップポイント取得手段をさらに備え、
前記積算スリップポイント算出手段は、前記減算スリップポイントに加えて前記加算スリップポイントを積算することを特徴とする車両駆動システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013069636A JP6008776B2 (ja) | 2013-03-28 | 2013-03-28 | 車両駆動システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013069636A JP6008776B2 (ja) | 2013-03-28 | 2013-03-28 | 車両駆動システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014189256A true JP2014189256A (ja) | 2014-10-06 |
| JP6008776B2 JP6008776B2 (ja) | 2016-10-19 |
Family
ID=51835928
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013069636A Active JP6008776B2 (ja) | 2013-03-28 | 2013-03-28 | 車両駆動システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6008776B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017178235A (ja) * | 2016-03-31 | 2017-10-05 | 本田技研工業株式会社 | 車両駆動システム |
| JP2017178236A (ja) * | 2016-03-31 | 2017-10-05 | 本田技研工業株式会社 | 車両駆動システム |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH092090A (ja) * | 1995-06-19 | 1997-01-07 | Honda Motor Co Ltd | 前後輪駆動車両 |
| JP2007030642A (ja) * | 2005-07-26 | 2007-02-08 | Denso Corp | 車両の駆動制御装置 |
| JP2008120119A (ja) * | 2006-11-08 | 2008-05-29 | Nissan Motor Co Ltd | 4輪駆動制御装置および4輪駆動制御方法 |
| JP2012091766A (ja) * | 2010-09-30 | 2012-05-17 | Honda Motor Co Ltd | 前後輪駆動車両 |
-
2013
- 2013-03-28 JP JP2013069636A patent/JP6008776B2/ja active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH092090A (ja) * | 1995-06-19 | 1997-01-07 | Honda Motor Co Ltd | 前後輪駆動車両 |
| JP2007030642A (ja) * | 2005-07-26 | 2007-02-08 | Denso Corp | 車両の駆動制御装置 |
| JP2008120119A (ja) * | 2006-11-08 | 2008-05-29 | Nissan Motor Co Ltd | 4輪駆動制御装置および4輪駆動制御方法 |
| JP2012091766A (ja) * | 2010-09-30 | 2012-05-17 | Honda Motor Co Ltd | 前後輪駆動車両 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017178235A (ja) * | 2016-03-31 | 2017-10-05 | 本田技研工業株式会社 | 車両駆動システム |
| JP2017178236A (ja) * | 2016-03-31 | 2017-10-05 | 本田技研工業株式会社 | 車両駆動システム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6008776B2 (ja) | 2016-10-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6773436B2 (ja) | 車両駆動システム | |
| JP5889161B2 (ja) | 車両駆動システム | |
| JP5226627B2 (ja) | 車両の駆動制御装置 | |
| JP5723589B2 (ja) | 前後輪駆動車両 | |
| CN103358901B (zh) | 车辆用驱动装置 | |
| JP5885534B2 (ja) | 制御システム | |
| JP6433435B2 (ja) | 車両駆動システム | |
| JP2011031744A (ja) | 車両の駆動制御装置 | |
| CA2934229A1 (en) | Slip determination system for vehicle | |
| JP6647117B2 (ja) | 車両駆動システム | |
| JP6008776B2 (ja) | 車両駆動システム | |
| JP5668946B2 (ja) | 車両用制御装置 | |
| JP6049284B2 (ja) | 制御システム | |
| JP2014113004A (ja) | 動力伝達装置の制御装置 | |
| JP2013154681A (ja) | 車両の制御装置 | |
| JP5304685B2 (ja) | 車両の制御装置 | |
| JP5826307B2 (ja) | 車両駆動システム | |
| JP5856135B2 (ja) | 車両駆動システム | |
| JP5048692B2 (ja) | 前後輪駆動車両 | |
| JP2014069657A (ja) | 四輪駆動車両の駆動装置 | |
| JP2011031745A (ja) | 車両の駆動制御装置 | |
| JP2018062230A (ja) | 車両駆動システム | |
| JP2018122794A (ja) | 車両駆動システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20151127 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20160808 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160816 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160913 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6008776 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |