JP2014197818A - 画像処理装置、画像処理方法、及び、画像処理システム - Google Patents
画像処理装置、画像処理方法、及び、画像処理システム Download PDFInfo
- Publication number
- JP2014197818A JP2014197818A JP2013073557A JP2013073557A JP2014197818A JP 2014197818 A JP2014197818 A JP 2014197818A JP 2013073557 A JP2013073557 A JP 2013073557A JP 2013073557 A JP2013073557 A JP 2013073557A JP 2014197818 A JP2014197818 A JP 2014197818A
- Authority
- JP
- Japan
- Prior art keywords
- image
- vehicle
- transmittance
- image processing
- processing apparatus
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images


















Classifications
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09G—ARRANGEMENTS OR CIRCUITS FOR CONTROL OF INDICATING DEVICES USING STATIC MEANS TO PRESENT VARIABLE INFORMATION
- G09G5/00—Control arrangements or circuits for visual indicators common to cathode-ray tube indicators and other visual indicators
- G09G5/36—Control arrangements or circuits for visual indicators common to cathode-ray tube indicators and other visual indicators characterised by the display of a graphic pattern, e.g. using an all-points-addressable [APA] memory
- G09G5/37—Details of the operation on graphic patterns
- G09G5/377—Details of the operation on graphic patterns for mixing or overlaying two or more graphic patterns
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09G—ARRANGEMENTS OR CIRCUITS FOR CONTROL OF INDICATING DEVICES USING STATIC MEANS TO PRESENT VARIABLE INFORMATION
- G09G5/00—Control arrangements or circuits for visual indicators common to cathode-ray tube indicators and other visual indicators
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09G—ARRANGEMENTS OR CIRCUITS FOR CONTROL OF INDICATING DEVICES USING STATIC MEANS TO PRESENT VARIABLE INFORMATION
- G09G2340/00—Aspects of display data processing
- G09G2340/10—Mixing of images, i.e. displayed pixel being the result of an operation, e.g. adding, on the corresponding input pixels
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09G—ARRANGEMENTS OR CIRCUITS FOR CONTROL OF INDICATING DEVICES USING STATIC MEANS TO PRESENT VARIABLE INFORMATION
- G09G2340/00—Aspects of display data processing
- G09G2340/12—Overlay of images, i.e. displayed pixel being the result of switching between the corresponding input pixels
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09G—ARRANGEMENTS OR CIRCUITS FOR CONTROL OF INDICATING DEVICES USING STATIC MEANS TO PRESENT VARIABLE INFORMATION
- G09G2354/00—Aspects of interface with display user
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09G—ARRANGEMENTS OR CIRCUITS FOR CONTROL OF INDICATING DEVICES USING STATIC MEANS TO PRESENT VARIABLE INFORMATION
- G09G2380/00—Specific applications
- G09G2380/10—Automotive applications
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Computer Hardware Design (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Image Processing (AREA)
- Closed-Circuit Television Systems (AREA)
- Image Analysis (AREA)
Abstract
Description
<1−1.概要>
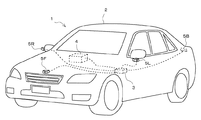
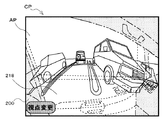
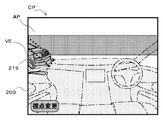
図1は、本発明の実施の形態に係る画像処理システム1の概要を示す。画像処理システム1は、車両2周囲に配置された複数のカメラ5(5F、5B、5L、5R)で取得した映像に対し、画像処理装置3が透過率を高めた車室内を示す車室画像を合成し、表示装置4に表示する。
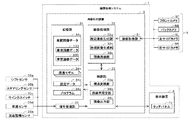
図3は、第1の実施の形態における画像処理システム1の構成を示す。画像処理システム1は、自動車等の車両2に搭載され、車両2の周辺領域を示す画像を生成して車室内のユーザに提示する。
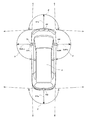
次に、画像処理部32が、車両2の周辺領域を示す周辺画像AP、及び、周辺画像APに車室画像200を重畳した合成画像CPを生成する手法を説明する。図7は、周辺画像生成部32aが周辺画像APを生成する手法を示す。
次に、画像処理装置3が、合成画像CPを生成する処理手順について説明する。図9は、画像処理装置3の処理手順を示す。図9に示す処理は、所定の周期(例えば、1/30秒周期)で繰り返し実行される。
以上、本発明の実施の形態について説明したが、本発明は上記実施の形態に限定されるものではなく様々な変形が可能である。以下、変形例について説明する。上記実施の形態及び以下で説明する形態を含む全ての形態は、適宜組み合わせ可能である。
2 車両
3 画像処理装置
4 表示装置
5 カメラ
Claims (13)
- 車両で用いられ、画像を処理する画像処理装置であって、
前記車両に設置されたカメラで取得した画像を用い、前記車両内の仮想視点からみた前記車両の周辺領域を示す周辺画像を生成する生成手段と、
前記仮想視点からみた前記車両を示す、複数の部分に分割される車両画像を取得する取得手段と、
前記車両画像の前記複数の部分の透過率を個別に決定し、該透過率で該複数の部分をそれぞれ透過させる透過手段と、
前記周辺画像と、前記透過率で透過された前記車両画像とを合成して合成画像を生成する合成手段と、
前記合成画像を表示装置に出力して表示させる出力手段と、
を備えることを特徴とする画像処理装置。 - 請求項1に記載の画像処理装置において、
前記複数の部分は、前記仮想視点から前記周辺領域をみた場合に、重なって位置する部分を含むことを特徴とする画像処理装置。 - 請求項1または2に記載の画像処理装置において、
前記複数の部分は、テールランプ、ヘッドライト、タイヤ、及び、タイヤハウスのいずれかを含むことを特徴とする画像処理装置。 - 請求項1ないし3のいずれかに記載の画像処理装置において、
前記仮想視点は、前記車両内から前記車両後方をみた視点であり、
前記複数の部分は、前記車両の形状を示す外縁部、テールランプ、及び、タイヤをそれぞれ示す車両画像を含むことを特徴とする画像処理装置。 - 請求項1ないし4のいずれかに記載の画像処理装置において、
前記透過手段は、前記車両画像のうち前記車両の形状を示す外縁部は透過させないことを特徴とする画像処理装置。 - 請求項1ないし5のいずれかに記載の画像処理装置において、
前記透過手段は、前記複数の部分のうち車両の所定の高さより上部に該当する部分の画像を全て透過させることを特徴とする画像処理装置。 - 請求項1ないし6のいずれかに記載の画像処理装置において、
前記透過手段は、前記複数の部分を網目状に透過させることを特徴とする画像処理装置。 - 請求項1ないし7のいずれかに記載の画像処理装置において、
前記車両の状態を取得する取得手段、
をさらに備え、
前記透過手段は、前記車両の状態に基づいて前記透過率を決定することを特徴とする画像処理装置。 - 請求項1ないし8のいずれかに記載の画像処理装置において、
前記車両の周辺に存在する物体の位置を検出する障害物検出手段、
をさらに備え、
前記透過手段は、前記透過率を前記物体の位置に基づいて決定することを特徴とする画像処理装置。 - 請求項1ないし9のいずれかに記載の画像処理装置において、
前記透過手段は、ユーザの操作に基いて設定される設定情報に基いて、前記複数の部分の透過率を個別に決定することを特徴とする画像処理装置。 - 請求項1ないし10のいずれかに記載の画像処理装置において、
前記出力手段は、前記複数の部分のうち透過率の設定が可能な部分を前記表示装置に出力して表示し、
前記透過手段は、前記表示装置に表示された前記透過率の設定が可能な部分に対するユーザの操作に基いて、前記透過率を個別に決定する部分を選択することを特徴とする画像処理装置。 - 車両で用いられる画像処理方法であって、
前記車両に設置されたカメラで取得した画像を用いて、前記車両内の仮想視点からみた前記車両の周辺領域を示す周辺画像を生成する工程と、
前記仮想視点からみた前記車両を示す車両画像を取得する工程と、
前記車両画像を複数の部分に分割し、該複数の部分の透過率を決定し、該透過率で該複数の部分を透過させる工程と、
前記周辺画像と前記複数の部分が透過された車両画像とを合成して合成画像を生成する工程と、
前記合成画像を表示装置に出力して表示させる工程と、
を備えることを特徴とする画像処理方法。 - 車両で用いられる画像処理システムであって、
請求項1ないし11のいずれかに記載の画像処理装置と、
前記画像処理装置から出力された前記合成画像を表示する表示装置と、
を備えることを特徴とする画像処理システム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013073557A JP6148887B2 (ja) | 2013-03-29 | 2013-03-29 | 画像処理装置、画像処理方法、及び、画像処理システム |
| US14/222,986 US9646572B2 (en) | 2013-03-29 | 2014-03-24 | Image processing apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013073557A JP6148887B2 (ja) | 2013-03-29 | 2013-03-29 | 画像処理装置、画像処理方法、及び、画像処理システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014197818A true JP2014197818A (ja) | 2014-10-16 |
| JP6148887B2 JP6148887B2 (ja) | 2017-06-14 |
Family
ID=51620349
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013073557A Expired - Fee Related JP6148887B2 (ja) | 2013-03-29 | 2013-03-29 | 画像処理装置、画像処理方法、及び、画像処理システム |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US9646572B2 (ja) |
| JP (1) | JP6148887B2 (ja) |
Cited By (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017126834A (ja) * | 2016-01-12 | 2017-07-20 | 株式会社デンソー | 運転支援装置、運転支援方法 |
| JP2017178024A (ja) * | 2016-03-30 | 2017-10-05 | 矢崎総業株式会社 | 運転支援装置 |
| CN107249934A (zh) * | 2015-02-17 | 2017-10-13 | 康蒂-特米克微电子有限公司 | 无失真显示车辆周边环境的方法和装置 |
| JP2018052216A (ja) * | 2016-09-27 | 2018-04-05 | 株式会社東海理化電機製作所 | 車両用視認装置及び車両用視認画像表示方法 |
| JP2018063294A (ja) * | 2016-10-11 | 2018-04-19 | アイシン精機株式会社 | 表示制御装置 |
| JP2018130597A (ja) * | 2018-06-01 | 2018-08-23 | 株式会社コナミデジタルエンタテインメント | ゲーム装置及びプログラム |
| CN108621938A (zh) * | 2017-03-24 | 2018-10-09 | 丰田自动车株式会社 | 用于车辆的观察装置 |
| JP2018164186A (ja) * | 2017-03-24 | 2018-10-18 | トヨタ自動車株式会社 | 車両用視認装置 |
| JP2018191242A (ja) * | 2017-05-11 | 2018-11-29 | アイシン精機株式会社 | 周辺監視装置 |
| WO2019008824A1 (ja) * | 2017-07-07 | 2019-01-10 | アイシン精機株式会社 | 周辺監視装置 |
| WO2019074005A1 (ja) * | 2017-10-10 | 2019-04-18 | マツダ株式会社 | 車両用ディスプレイ装置 |
| JP2019071544A (ja) * | 2017-10-10 | 2019-05-09 | マツダ株式会社 | 車両用表示装置 |
| JP2019079250A (ja) * | 2017-10-24 | 2019-05-23 | 株式会社デンソーテン | 画像処理装置及び画像処理方法 |
| JP2019532817A (ja) * | 2016-09-02 | 2019-11-14 | トルンプ マシーネン オーストリア ゲゼルシャフト ミット ベシュレンクテル ハフツング ウント コンパニー コマンディトゲゼルシャフト | 作業領域画像検出装置を有する曲げ機械 |
| US10506178B2 (en) | 2017-01-20 | 2019-12-10 | Kabushiki Kaisha Toshiba | Image synthesis device for electronic mirror and method thereof |
| JP2021145326A (ja) * | 2020-03-10 | 2021-09-24 | パナソニックIpマネジメント株式会社 | 画像合成装置 |
| JP2022009331A (ja) * | 2017-05-11 | 2022-01-14 | 株式会社アイシン | 周辺監視装置 |
| EP3967554A1 (en) | 2020-09-15 | 2022-03-16 | Mazda Motor Corporation | Vehicular display system |
| JP7057052B1 (ja) | 2021-03-19 | 2022-04-19 | 三菱ロジスネクスト株式会社 | 荷役車 |
| WO2023136070A1 (ja) * | 2022-01-14 | 2023-07-20 | コベルコ建機株式会社 | 遠隔操作支援システムおよび遠隔操作支援方法 |
| JP2024039702A (ja) * | 2022-09-12 | 2024-03-25 | 本田技研工業株式会社 | 情報処理システム |
Families Citing this family (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20140124981A (ko) * | 2013-04-17 | 2014-10-28 | 삼성전자주식회사 | 투명 디스플레이를 갖는 휴대 단말기의 투명도 조절 방법 및 그 장치 |
| US9437131B2 (en) * | 2013-07-05 | 2016-09-06 | Visteon Global Technologies, Inc. | Driving a multi-layer transparent display |
| EP3061642B1 (en) * | 2013-10-22 | 2019-10-02 | Nippon Seiki Co., Ltd. | Vehicle information projection system, and projection device |
| US9598012B2 (en) * | 2014-03-11 | 2017-03-21 | Toyota Motor Engineering & Manufacturing North America, Inc. | Surroundings monitoring system for a vehicle |
| TWI514065B (zh) * | 2014-11-07 | 2015-12-21 | Papago Inc | 360 degree road traffic recorder |
| US10486599B2 (en) | 2015-07-17 | 2019-11-26 | Magna Mirrors Of America, Inc. | Rearview vision system for vehicle |
| DE102016216040B4 (de) | 2016-08-25 | 2024-09-05 | Bayerische Motoren Werke Aktiengesellschaft | Personenkraftwagen mit einem Fahrwerk |
| JP6768412B2 (ja) * | 2016-08-26 | 2020-10-14 | 株式会社東海理化電機製作所 | 車両用視認装置及び車両用視認画像表示方法 |
| CN106339986A (zh) * | 2016-08-31 | 2017-01-18 | 天脉聚源(北京)科技有限公司 | 在虚拟座位上分配头像的方法和装置 |
| US20180152628A1 (en) * | 2016-11-30 | 2018-05-31 | Waymo Llc | Camera peek into turn |
| JP6730177B2 (ja) * | 2016-12-28 | 2020-07-29 | 株式会社デンソーテン | 画像生成装置および画像生成方法 |
| GB2559759B (en) * | 2017-02-16 | 2020-07-29 | Jaguar Land Rover Ltd | Apparatus and method for displaying information |
| CN106985751A (zh) * | 2017-04-07 | 2017-07-28 | 深圳市歌美迪电子技术发展有限公司 | 后视显示方法、装置及设备 |
| US10730440B2 (en) * | 2017-05-31 | 2020-08-04 | Panasonic Intellectual Property Management Co., Ltd. | Display system, electronic mirror system, and moving body |
| JP7353782B2 (ja) * | 2019-04-09 | 2023-10-02 | キヤノン株式会社 | 情報処理装置、情報処理方法、及びプログラム |
| DE102019207415A1 (de) * | 2019-05-21 | 2020-11-26 | Conti Temic Microelectronic Gmbh | Verfahren zur Erzeugung eines Bildes einer Fahrzeugumgebung und Vorrichtung zur Erzeugung eines Bildes einer Fahrzeugumgebung |
| DE102019219017A1 (de) * | 2019-12-05 | 2021-06-10 | Robert Bosch Gmbh | Anzeigeverfahren zur Darstellung eines Umgebungsmodells eines Fahrzeugs, Computerprogramm, Steuergerät und Fahrzeug |
| JP7018923B2 (ja) * | 2019-12-13 | 2022-02-14 | 本田技研工業株式会社 | 駐車支援装置、駐車支援方法およびプログラム |
| JP7426655B2 (ja) * | 2020-03-23 | 2024-02-02 | パナソニックIpマネジメント株式会社 | 表示装置、表示方法、及び車両 |
| PH12022552538A1 (en) * | 2020-03-31 | 2023-12-18 | Honda Motor Co Ltd | Image processing device, vehicle, image processing method, and program |
| CN112937430B (zh) * | 2021-03-31 | 2023-04-28 | 重庆长安汽车股份有限公司 | 一种车辆a柱盲区预警方法、系统和车辆 |
| CN117984776A (zh) * | 2022-10-26 | 2024-05-07 | 现代自动车株式会社 | 用于车辆的显示方法和装置 |
| JP7619397B1 (ja) | 2023-07-25 | 2025-01-22 | トヨタ自動車株式会社 | 遠隔オペレータ端末、遠隔操作支援方法、及び遠隔操作システム |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0950541A (ja) * | 1995-08-10 | 1997-02-18 | Sega Enterp Ltd | 仮想画像生成装置及びその方法 |
| JP2003196645A (ja) * | 2001-12-28 | 2003-07-11 | Equos Research Co Ltd | 車両の画像処理装置 |
| JP2006074105A (ja) * | 2004-08-31 | 2006-03-16 | Equos Research Co Ltd | 車両周辺画像表示装置 |
| WO2009104675A1 (ja) * | 2008-02-20 | 2009-08-27 | クラリオン株式会社 | 車両周辺画像表示システム |
| JP2010109684A (ja) * | 2008-10-30 | 2010-05-13 | Clarion Co Ltd | 車両周辺画像表示システム |
| JP2010114618A (ja) * | 2008-11-06 | 2010-05-20 | Clarion Co Ltd | 車両周辺監視システム |
| JP2011023805A (ja) * | 2009-07-13 | 2011-02-03 | Clarion Co Ltd | 車両用死角映像表示システムと車両用死角映像表示方法 |
| JP2011188335A (ja) * | 2010-03-10 | 2011-09-22 | Clarion Co Ltd | 車両用周囲監視装置 |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6498620B2 (en) * | 1993-02-26 | 2002-12-24 | Donnelly Corporation | Vision system for a vehicle including an image capture device and a display system having a long focal length |
| US7212653B2 (en) * | 2001-12-12 | 2007-05-01 | Kabushikikaisha Equos Research | Image processing system for vehicle |
| JP2004046493A (ja) * | 2002-07-11 | 2004-02-12 | Seiko Epson Corp | 画像調節装置およびそのプログラム並びに画像調節方法 |
| US20080109751A1 (en) * | 2003-12-31 | 2008-05-08 | Alias Systems Corp. | Layer editor system for a pen-based computer |
| JP4522129B2 (ja) * | 2004-03-31 | 2010-08-11 | キヤノン株式会社 | 画像処理方法および画像処理装置 |
| ATE479980T1 (de) * | 2006-08-24 | 2010-09-15 | Valeo Vision | Verfahren zur bestimmung der durchfahrt eines fahrzeugs durch eine engen durchlass |
| JP4793307B2 (ja) * | 2007-04-03 | 2011-10-12 | 株式会社デンソー | 車両周辺監視装置 |
| CN201402413Y (zh) * | 2009-03-30 | 2010-02-10 | 德尔福技术有限公司 | 车辆的操控辅助设备 |
| EP2244242A1 (en) * | 2009-04-23 | 2010-10-27 | Wayfinder Systems AB | Method and device for improved navigation |
| JP5376223B2 (ja) * | 2009-05-18 | 2013-12-25 | アイシン精機株式会社 | 運転支援装置 |
| US20100315413A1 (en) * | 2009-06-16 | 2010-12-16 | Microsoft Corporation | Surface Computer User Interaction |
| US20120249789A1 (en) * | 2009-12-07 | 2012-10-04 | Clarion Co., Ltd. | Vehicle peripheral image display system |
| WO2011070641A1 (ja) * | 2009-12-07 | 2011-06-16 | クラリオン株式会社 | 車両周辺監視システム |
| WO2012091476A2 (ko) * | 2010-12-30 | 2012-07-05 | 주식회사 와이즈오토모티브 | 사각 지대 표시 장치 및 방법 |
| JP5459251B2 (ja) * | 2011-03-31 | 2014-04-02 | カシオ計算機株式会社 | 画像処理装置、画像処理方法及びプログラム |
| JP5827109B2 (ja) * | 2011-11-28 | 2015-12-02 | 京セラ株式会社 | 装置、方法、及びプログラム |
-
2013
- 2013-03-29 JP JP2013073557A patent/JP6148887B2/ja not_active Expired - Fee Related
-
2014
- 2014-03-24 US US14/222,986 patent/US9646572B2/en not_active Expired - Fee Related
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0950541A (ja) * | 1995-08-10 | 1997-02-18 | Sega Enterp Ltd | 仮想画像生成装置及びその方法 |
| JP2003196645A (ja) * | 2001-12-28 | 2003-07-11 | Equos Research Co Ltd | 車両の画像処理装置 |
| JP2006074105A (ja) * | 2004-08-31 | 2006-03-16 | Equos Research Co Ltd | 車両周辺画像表示装置 |
| WO2009104675A1 (ja) * | 2008-02-20 | 2009-08-27 | クラリオン株式会社 | 車両周辺画像表示システム |
| JP2010109684A (ja) * | 2008-10-30 | 2010-05-13 | Clarion Co Ltd | 車両周辺画像表示システム |
| JP2010114618A (ja) * | 2008-11-06 | 2010-05-20 | Clarion Co Ltd | 車両周辺監視システム |
| JP2011023805A (ja) * | 2009-07-13 | 2011-02-03 | Clarion Co Ltd | 車両用死角映像表示システムと車両用死角映像表示方法 |
| JP2011188335A (ja) * | 2010-03-10 | 2011-09-22 | Clarion Co Ltd | 車両用周囲監視装置 |
Cited By (44)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107249934A (zh) * | 2015-02-17 | 2017-10-13 | 康蒂-特米克微电子有限公司 | 无失真显示车辆周边环境的方法和装置 |
| JP2018509799A (ja) * | 2015-02-17 | 2018-04-05 | コンティ テミック マイクロエレクトロニック ゲゼルシャフト ミット ベシュレンクテル ハフツングConti Temic microelectronic GmbH | 車両の車両周辺部の歪無い表示のための方法、並びに、装置 |
| WO2017122654A1 (ja) * | 2016-01-12 | 2017-07-20 | 株式会社デンソー | 運転支援装置及び運転支援方法 |
| CN108463998A (zh) * | 2016-01-12 | 2018-08-28 | 株式会社电装 | 驾驶辅助装置以及驾驶辅助方法 |
| US10875452B2 (en) | 2016-01-12 | 2020-12-29 | Denso Corporation | Driving assistance device and driving assistance method |
| JP2017126834A (ja) * | 2016-01-12 | 2017-07-20 | 株式会社デンソー | 運転支援装置、運転支援方法 |
| JP2017178024A (ja) * | 2016-03-30 | 2017-10-05 | 矢崎総業株式会社 | 運転支援装置 |
| JP7328889B2 (ja) | 2016-09-02 | 2023-08-17 | トルンプ マシーネン オーストリア ゲゼルシャフト ミット ベシュレンクテル ハフツング ウント コンパニー コマンディトゲゼルシャフト | 作業領域画像検出装置を有する曲げ機械 |
| JP2019532817A (ja) * | 2016-09-02 | 2019-11-14 | トルンプ マシーネン オーストリア ゲゼルシャフト ミット ベシュレンクテル ハフツング ウント コンパニー コマンディトゲゼルシャフト | 作業領域画像検出装置を有する曲げ機械 |
| US11185903B2 (en) | 2016-09-02 | 2021-11-30 | Trumpf Maschinen Austria Gmbh & Co. Kg | Bending machine having a working area image capturing apparatus and method for improving the operational safety of a bending machine |
| JP2018052216A (ja) * | 2016-09-27 | 2018-04-05 | 株式会社東海理化電機製作所 | 車両用視認装置及び車両用視認画像表示方法 |
| JP2018063294A (ja) * | 2016-10-11 | 2018-04-19 | アイシン精機株式会社 | 表示制御装置 |
| US11356618B2 (en) | 2017-01-20 | 2022-06-07 | Kabushiki Kaisha Toshiba | Image synthesis device for electronic mirror and method thereof |
| US11800045B2 (en) | 2017-01-20 | 2023-10-24 | Kabushiki Kaisha Toshiba | Image synthesis device for electronic mirror and method thereof |
| US12041375B2 (en) | 2017-01-20 | 2024-07-16 | Kabushiki Kaisha Toshiba | Image synthesis device for electronic mirror and method thereof |
| US11044421B2 (en) | 2017-01-20 | 2021-06-22 | Kabushiki Kaisha Toshiba | Image synthesis device for electronic mirror and method thereof |
| US12477076B2 (en) | 2017-01-20 | 2025-11-18 | Kabushiki Kaisha Toshiba | Image synthesis device for electronic mirror and method thereof |
| US10506178B2 (en) | 2017-01-20 | 2019-12-10 | Kabushiki Kaisha Toshiba | Image synthesis device for electronic mirror and method thereof |
| JP2018164186A (ja) * | 2017-03-24 | 2018-10-18 | トヨタ自動車株式会社 | 車両用視認装置 |
| CN108621938A (zh) * | 2017-03-24 | 2018-10-09 | 丰田自动车株式会社 | 用于车辆的观察装置 |
| US10737624B2 (en) | 2017-03-24 | 2020-08-11 | Toyota Jidosha Kabushiki Kaisha | Viewing device for vehicle |
| JP2018191242A (ja) * | 2017-05-11 | 2018-11-29 | アイシン精機株式会社 | 周辺監視装置 |
| JP2022009331A (ja) * | 2017-05-11 | 2022-01-14 | 株式会社アイシン | 周辺監視装置 |
| JP7259914B2 (ja) | 2017-05-11 | 2023-04-18 | 株式会社アイシン | 周辺監視装置 |
| US11477373B2 (en) | 2017-07-07 | 2022-10-18 | Aisin Corporation | Periphery monitoring device |
| WO2019008824A1 (ja) * | 2017-07-07 | 2019-01-10 | アイシン精機株式会社 | 周辺監視装置 |
| JP2019014398A (ja) * | 2017-07-07 | 2019-01-31 | アイシン精機株式会社 | 周辺監視装置 |
| WO2019074005A1 (ja) * | 2017-10-10 | 2019-04-18 | マツダ株式会社 | 車両用ディスプレイ装置 |
| JP2019071544A (ja) * | 2017-10-10 | 2019-05-09 | マツダ株式会社 | 車両用表示装置 |
| JP7220979B2 (ja) | 2017-10-10 | 2023-02-13 | マツダ株式会社 | 車両用表示装置 |
| JP2019071547A (ja) * | 2017-10-10 | 2019-05-09 | マツダ株式会社 | 車両用表示装置 |
| JP2019079250A (ja) * | 2017-10-24 | 2019-05-23 | 株式会社デンソーテン | 画像処理装置及び画像処理方法 |
| JP7051369B2 (ja) | 2017-10-24 | 2022-04-11 | 株式会社デンソーテン | 画像処理装置及び画像処理方法 |
| JP2018130597A (ja) * | 2018-06-01 | 2018-08-23 | 株式会社コナミデジタルエンタテインメント | ゲーム装置及びプログラム |
| JP2021145326A (ja) * | 2020-03-10 | 2021-09-24 | パナソニックIpマネジメント株式会社 | 画像合成装置 |
| EP3967554A1 (en) | 2020-09-15 | 2022-03-16 | Mazda Motor Corporation | Vehicular display system |
| US11601621B2 (en) | 2020-09-15 | 2023-03-07 | Mazda Motor Corporation | Vehicular display system |
| JP7057052B1 (ja) | 2021-03-19 | 2022-04-19 | 三菱ロジスネクスト株式会社 | 荷役車 |
| JP2022144723A (ja) * | 2021-03-19 | 2022-10-03 | 三菱ロジスネクスト株式会社 | 荷役車 |
| WO2023136070A1 (ja) * | 2022-01-14 | 2023-07-20 | コベルコ建機株式会社 | 遠隔操作支援システムおよび遠隔操作支援方法 |
| JP2023103876A (ja) * | 2022-01-14 | 2023-07-27 | コベルコ建機株式会社 | 遠隔操作支援システム |
| JP2024039702A (ja) * | 2022-09-12 | 2024-03-25 | 本田技研工業株式会社 | 情報処理システム |
| JP7550823B2 (ja) | 2022-09-12 | 2024-09-13 | 本田技研工業株式会社 | 情報処理システム |
| US12450916B2 (en) | 2022-09-12 | 2025-10-21 | Honda Motor Co., Ltd. | Information process system |
Also Published As
| Publication number | Publication date |
|---|---|
| US20140292805A1 (en) | 2014-10-02 |
| JP6148887B2 (ja) | 2017-06-14 |
| US9646572B2 (en) | 2017-05-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6148887B2 (ja) | 画像処理装置、画像処理方法、及び、画像処理システム | |
| US9706175B2 (en) | Image processing device, image processing system, and image processing method | |
| JP6014442B2 (ja) | 画像生成装置、画像表示システム、および、画像生成方法 | |
| JP6658643B2 (ja) | 車両用視認装置 | |
| JP6413207B2 (ja) | 車両用表示装置 | |
| US10930070B2 (en) | Periphery monitoring device | |
| JP6658642B2 (ja) | 車両用視認装置 | |
| US20120287282A1 (en) | Image processing apparatus, image processing system, and image processing method | |
| JP6014433B2 (ja) | 画像処理装置、画像処理方法、及び、画像処理システム | |
| US20120320213A1 (en) | Image display device | |
| CN111669543A (zh) | 用于停车解决方案的车辆成像系统和方法 | |
| US20120249796A1 (en) | Image processing device, image processing system, and image processing method | |
| JP2012257004A (ja) | 画像生成装置、画像表示システム、及び、画像生成方法 | |
| WO2005084027A1 (ja) | 画像生成装置、画像生成プログラム、及び画像生成方法 | |
| KR20110080985A (ko) | 차량용 다시점 룸미러 | |
| JP2023536976A (ja) | 運転者による後方視認のための電子画像ディスプレイを含む車両視認システム及び方法 | |
| JP2022082487A (ja) | 周辺画像生成装置、表示制御方法 | |
| JP6258000B2 (ja) | 画像表示システム、画像表示方法及びプログラム | |
| JP5479639B2 (ja) | 画像処理装置、画像処理システム、および、画像処理方法 | |
| JP2014072604A (ja) | 画像処理システム、画像処理装置、画像処理方法、及び、プログラム | |
| JP2008500919A (ja) | 移動体用表示システム及び移動体 | |
| KR20180094717A (ko) | Avm을 이용한 운전 지원 장치 및 시스템 | |
| WO2013144998A1 (ja) | 車両用視認支援装置 | |
| JP7813933B2 (ja) | 表示システム、移動体、画像処理装置、および表示装置 | |
| JP6974564B2 (ja) | 表示制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20151214 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20160930 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20161018 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20161209 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170510 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170522 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6148887 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |