JP2014199595A - 作業負荷推定プログラム、作業負荷推定方法、及び情報処理装置 - Google Patents
作業負荷推定プログラム、作業負荷推定方法、及び情報処理装置 Download PDFInfo
- Publication number
- JP2014199595A JP2014199595A JP2013075026A JP2013075026A JP2014199595A JP 2014199595 A JP2014199595 A JP 2014199595A JP 2013075026 A JP2013075026 A JP 2013075026A JP 2013075026 A JP2013075026 A JP 2013075026A JP 2014199595 A JP2014199595 A JP 2014199595A
- Authority
- JP
- Japan
- Prior art keywords
- load
- worker
- work
- posture
- data
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images










Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02P—CLIMATE CHANGE MITIGATION TECHNOLOGIES IN THE PRODUCTION OR PROCESSING OF GOODS
- Y02P90/00—Enabling technologies with a potential contribution to greenhouse gas [GHG] emissions mitigation
- Y02P90/02—Total factory control, e.g. smart factories, flexible manufacturing systems [FMS] or integrated manufacturing systems [IMS]
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02P—CLIMATE CHANGE MITIGATION TECHNOLOGIES IN THE PRODUCTION OR PROCESSING OF GOODS
- Y02P90/00—Enabling technologies with a potential contribution to greenhouse gas [GHG] emissions mitigation
- Y02P90/30—Computing systems specially adapted for manufacturing
Landscapes
- Management, Administration, Business Operations System, And Electronic Commerce (AREA)
- General Factory Administration (AREA)
Abstract
Description
図1は、情報処理装置の機能構成の一例を示す図である。図1に示す情報処理装置10は、入力手段11と、作業作成手段12と、負荷算出手段13と、表示手段14と、記憶手段15とを有する。負荷算出手段13は、姿勢判定手段13−1と、部位毎負荷算出手段13−2と、作業者毎負荷集計手段13−3とを有する。また、記憶手段15は、作業テーブル15−1と、姿勢毎負荷テーブル15−2と、保持物毎負荷係数テーブル15−3と、作業者負荷テーブル15−4とを有する。
上述した情報処理装置の各機能を実行させることができる実行プログラム(作業負荷推定プログラム)を例えば汎用のPC等にインストールすることにより、本実施形態における作業負荷推定処理を実現することができる。ここで、情報処理装置10における作業負荷推定処理が実現可能なコンピュータのハードウェア構成例について図を用いて説明する。
情報処理装置10における作業負荷推定処理の一例について、フローチャートを用いて説明する。図3は、作業負荷推定処理の一例を示すフローチャートである。
次に、上述したS03における作業負荷算出処理について、フローチャートを用いて具体的に説明する。図4は、作業負荷算出処理の一例を示すフローチャートである。図4の例に示す作業負荷算出処理において、負荷算出手段13は、所定の工程作業等に対して、所定時間間隔毎のユーザの動作に伴う姿勢や保持物等による負荷を算出するため、変数の一例である時間(Time)に初期値(0)を設定する(S11)。
ここで、本実施形態における各種テーブル例について図を用いて説明する。
図5は、作業テーブルの一例を示す図である。図5の例に示す作業テーブル15−1の項目としては、例えば「Time」、「頭位置(X,Y,Z)」、「右手位置(X,Y,Z)」、「右種別」、「右手加重」、「左手位置(X,Y,Z)」、「左種別」、「左手加重」、「腰位置(X,Y,Z)」、「右足位置(X,Y,Z)」、「左足位置(X,Y,Z)」等があるが、これに限定されるものではない。作業テーブル15−1の他の項目としては、例えば首や背中、指、手首、肘、膝等の体の他の部位(関節等を含む)等があるが、これに限定されるものではない。本実施形態では、作業者の体に対する少なくとも1つの部位を用いて作業テーブルを設定し、設定された部位に対して姿勢や保持物等による負荷情報を設定する。
図7は、姿勢毎負荷テーブルの一例を示す図である。姿勢毎負荷テーブル15−2は、作業者の姿勢と負荷との対応関係を示すデータである。図7に示す姿勢毎負荷テーブル15−2の項目としては、例えば姿勢を識別するための識別情報である「姿勢ID」、頭位置(X,Y,Z)」、「右手位置(X,Y,Z)」、「右手負荷率」、「左手位置(X,Y,Z)」、「左手負荷率」、「腰位置(X,Y,Z)」、「右足(X,Y,Z)」、「左足(X,Y,Z)」、・・・、「負荷率」等であるが、これに限定されるものではない。
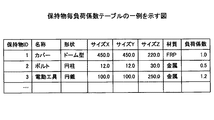
図8は、保持物毎負荷係数テーブルの一例を示す図である。保持物毎負荷係数テーブル15−3は、保持物と負荷との対応関係を示すデータである。図8に示す保持物テーブル15−3の項目としては、例えば作業者が保持する物体を識別するための識別情報である「保持物ID」、「形状」、「サイズ(X,Y,Z)」、「材質」、「負荷係数」等があるが、これに限定されるものではなく、例えば重さ等の情報を含んでいてもよい。
図9は、作業者負荷テーブルの一例を示す図である。図9に示す作業者負荷テーブル15−4の項目としては、例えば「Time」、「頭位置(X,Y,Z)」、「右手位置(X,Y,Z)」、「右種別」、「右手負荷」、「左手位置(X,Y,Z)」、「左種別」、「左手負荷」、「腰位置(X,Y,Z)」、「右足位置(X,Y,Z)」、「左足位置(X,Y,Z)」、「姿勢ID」、「全体負荷」等があるが、これに限定されるものではない。
次に、本実施形態における負荷取得の具体例について説明する。図10は、作業者の姿勢の一例を示す図である。また、図11は、負荷算出の具体例を示す図である。
(付記1)
作業に応じた作業者の姿勢の時間的な変化を示すデータ又は作業に応じた作業者の保持物を示すデータを取得し、
作業者の姿勢と負荷との対応関係を示すデータ又は保持物と負荷との対応関係を示すデータを参照して、取得した該データに含まれる作業者の各姿勢に対応する負荷又は取得した該データに含まれる作業者の保持物に対応する負荷を特定し、
特定した前記負荷を集計して、前記作業における前記作業者の総負荷を算出する、
処理をコンピュータに実行させる作業負荷推定プロラム。
(付記2)
作業者の姿勢の時間的な変化又は作業者の保持物の情報を含む、複数の作業者のそれぞれの作業スケジュールデータを取得し、
作業者の姿勢と負荷との対応関係を示すデータ又は保持物と負荷との対応関係を示すデータを参照して、取得した該作業スケジュールデータに含まれる作業者の各姿勢に対応する負荷又は取得した該データに含まれる作業者の保持物に対応する負荷を特定し、
特定した前記負荷を集計して、前記複数の作業者のそれぞれについて、対応する作業スケジュールに応じた作業者の総負荷を算出し、
算出した前記複数の作業者の総負荷に基づいて、前記複数の作業者のうちの少なくとも一人の作業者についての作業スケジュールを変更して、前記複数の作業者の総負荷の偏りを減じた変更作業スケジュールを出力する、
処理をコンピュータに実行させる作業負荷推定プロラム。
(付記3)
前記姿勢に対応する負荷は、前記作業者の少なくとも1つの部位の位置座標に対応させた負荷であることを特徴とする付記1又は2に記載の作業負荷推定プログラム。
(付記4)
前記保持物に対応する負荷は、前記保持物の形状、サイズ、及び材質のうち、少なくとも1つに対応させた負荷であることを特徴とする付記1乃至3の何れか1項に記載の作
(付記5)
前記姿勢に対応する負荷の特定は、
前記作業者の姿勢と負荷との対応関係を示すデータから、前記作業者の姿勢に最も近似した姿勢に対する負荷を用いて特定することを特徴とする付記1乃至4の何れか1項に記載の作業負荷推定プログラム。
(付記6)
前記姿勢に対応する負荷と前記保持物に対応する負荷とを乗算して負荷を算出することを特徴とする付記1乃至5の何れか1項に記載の作業負荷推定プログラム。
(付記7)
情報処理装置が、
作業に応じた作業者の姿勢の時間的な変化を示すデータ又は作業に応じた作業者の保持物を示すデータを取得し、
作業者の姿勢と負荷との対応関係を示すデータ又は保持物と負荷との対応関係を示すデータを参照して、取得した該データに含まれる作業者の各姿勢に対応する負荷又は取得した該データに含まれる作業者の保持物に対応する負荷を特定し、
特定した前記負荷を集計して、前記作業における前記作業者の総負荷を算出することを特徴とする作業負荷推定方法。
(付記8)
情報処理装置が、
作業者の姿勢の時間的な変化又は作業者の保持物の情報を含む、複数の作業者のそれぞれの作業スケジュールデータを取得し、
作業者の姿勢と負荷との対応関係を示すデータ又は保持物と負荷との対応関係を示すデータを参照して、取得した該作業スケジュールデータに含まれる作業者の各姿勢に対応する負荷又は取得した該データに含まれる作業者の保持物に対応する負荷を特定し、
特定した前記負荷を集計して、前記複数の作業者のそれぞれについて、対応する作業スケジュールに応じた作業者の総負荷を算出し、
算出した前記複数の作業者の総負荷に基づいて、前記複数の作業者のうちの少なくとも一人の作業者についての作業スケジュールを変更して、前記複数の作業者の総負荷の偏りを減じた変更作業スケジュールを出力することを特徴とする作業負荷推定方法。
(付記9)
作業に応じた作業者の姿勢の時間的な変化を示すデータ又は作業に応じた作業者の保持物を示すデータを取得し、作業者の姿勢と負荷との対応関係を示すデータ又は保持物と負荷との対応関係を示すデータを記憶する記憶手段と、
前記記憶手段を参照して、取得した該データに含まれる作業者の各姿勢に対応する負荷又は取得した該データに含まれる作業者の保持物に対応する負荷を特定し、特定した前記負荷を集計して、前記作業における前記作業者の総負荷を算出する負荷算出手段とを有することを特徴とする情報処理装置。
(付記10)
作業者の姿勢の時間的な変化又は作業者の保持物の情報を含む、複数の作業者のそれぞれの作業スケジュールデータを作業作成手段と、
作業者の姿勢と負荷との対応関係を示すデータ又は保持物と負荷との対応関係を示すデータを記憶する記憶手段と、
前記記憶手段を参照して、前記作業作成手段により取得した該作業スケジュールデータに含まれる作業者の各姿勢に対応する負荷又は取得した該データに含まれる作業者の保持物に対応する負荷を特定し、特定した前記負荷を集計して、前記複数の作業者のそれぞれについて、対応する作業スケジュールに応じた作業者の総負荷を算出する負荷算出手段とを有し、
前記作業作成手段は、前記負荷算出手段により算出した前記複数の作業者の総負荷に基づいて、前記複数の作業者のうちの少なくとも一人の作業者についての作業スケジュールを変更して、前記複数の作業者の総負荷の偏りを減じた変更作業スケジュールを出力することを特徴とする情報処理装置。
11 入力手段
12 作業作成手段
13 負荷算出手段
14 表示部
15 記憶手段
21 入力装置
22 出力装置
23 ドライブ装置
24 補助記憶装置
25 主記憶装置
26 CPU
27 ネットワーク接続装置
28 記録媒体
30 作業者
31 頭
32 右手
33 左手
40 保持物
Claims (9)
- 作業に応じた作業者の姿勢の時間的な変化を示すデータ又は作業に応じた作業者の保持物を示すデータを取得し、
作業者の姿勢と負荷との対応関係を示すデータ又は保持物と負荷との対応関係を示すデータを参照して、取得した該データに含まれる作業者の各姿勢に対応する負荷又は取得した該データに含まれる作業者の保持物に対応する負荷を特定し、
特定した前記負荷を集計して、前記作業における前記作業者の総負荷を算出する、
処理をコンピュータに実行させる作業負荷推定プロラム。 - 作業者の姿勢の時間的な変化又は作業者の保持物の情報を含む、複数の作業者のそれぞれの作業スケジュールデータを取得し、
作業者の姿勢と負荷との対応関係を示すデータ又は保持物と負荷との対応関係を示すデータを参照して、取得した該作業スケジュールデータに含まれる作業者の各姿勢に対応する負荷又は取得した該データに含まれる作業者の保持物に対応する負荷を特定し、
特定した前記負荷を集計して、前記複数の作業者のそれぞれについて、対応する作業スケジュールに応じた作業者の総負荷を算出し、
算出した前記複数の作業者の総負荷に基づいて、前記複数の作業者のうちの少なくとも一人の作業者についての作業スケジュールを変更して、前記複数の作業者の総負荷の偏りを減じた変更作業スケジュールを出力する、
処理をコンピュータに実行させる作業負荷推定プロラム。 - 前記姿勢に対応する負荷は、前記作業者の少なくとも1つの部位の位置座標に対応させた負荷であることを特徴とする請求項1又は2に記載の作業負荷推定プログラム。
- 前記保持物に対応する負荷は、前記保持物の形状、サイズ、及び材質のうち、少なくとも1つに対応させた負荷であることを特徴とする請求項1乃至3の何れか1項に記載の作業負荷推定プログラム。
- 前記姿勢に対応する負荷の特定は、
前記作業者の姿勢と負荷との対応関係を示すデータから、前記作業者の姿勢に最も近似した姿勢に対する負荷を用いて特定することを特徴とする請求項1乃至4の何れか1項に記載の作業負荷推定プログラム。 - 情報処理装置が、
作業に応じた作業者の姿勢の時間的な変化を示すデータ又は作業に応じた作業者の保持物を示すデータを取得し、
作業者の姿勢と負荷との対応関係を示すデータ又は保持物と負荷との対応関係を示すデータを参照して、取得した該データに含まれる作業者の各姿勢に対応する負荷又は取得した該データに含まれる作業者の保持物に対応する負荷を特定し、
特定した前記負荷を集計して、前記作業における前記作業者の総負荷を算出することを特徴とする作業負荷推定方法。 - 情報処理装置が、
作業者の姿勢の時間的な変化又は作業者の保持物の情報を含む、複数の作業者のそれぞれの作業スケジュールデータを取得し、
作業者の姿勢と負荷との対応関係を示すデータ又は保持物と負荷との対応関係を示すデータを参照して、取得した該作業スケジュールデータに含まれる作業者の各姿勢に対応する負荷又は取得した該データに含まれる作業者の保持物に対応する負荷を特定し、
特定した前記負荷を集計して、前記複数の作業者のそれぞれについて、対応する作業スケジュールに応じた作業者の総負荷を算出し、
算出した前記複数の作業者の総負荷に基づいて、前記複数の作業者のうちの少なくとも一人の作業者についての作業スケジュールを変更して、前記複数の作業者の総負荷の偏りを減じた変更作業スケジュールを出力することを特徴とする作業負荷推定方法。 - 作業に応じた作業者の姿勢の時間的な変化を示すデータ又は作業に応じた作業者の保持物を示すデータを取得し、作業者の姿勢と負荷との対応関係を示すデータ又は保持物と負荷との対応関係を示すデータを記憶する記憶手段と、
前記記憶手段を参照して、取得した該データに含まれる作業者の各姿勢に対応する負荷又は取得した該データに含まれる作業者の保持物に対応する負荷を特定し、特定した前記負荷を集計して、前記作業における前記作業者の総負荷を算出する負荷算出手段とを有することを特徴とする情報処理装置。 - 作業者の姿勢の時間的な変化又は作業者の保持物の情報を含む、複数の作業者のそれぞれの作業スケジュールデータを作業作成手段と、
作業者の姿勢と負荷との対応関係を示すデータ又は保持物と負荷との対応関係を示すデータを記憶する記憶手段と、
前記記憶手段を参照して、前記作業作成手段により取得した該作業スケジュールデータに含まれる作業者の各姿勢に対応する負荷又は取得した該データに含まれる作業者の保持物に対応する負荷を特定し、特定した前記負荷を集計して、前記複数の作業者のそれぞれについて、対応する作業スケジュールに応じた作業者の総負荷を算出する負荷算出手段とを有し、
前記作業作成手段は、前記負荷算出手段により算出した前記複数の作業者の総負荷に基づいて、前記複数の作業者のうちの少なくとも一人の作業者についての作業スケジュールを変更して、前記複数の作業者の総負荷の偏りを減じた変更作業スケジュールを出力することを特徴とする情報処理装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013075026A JP2014199595A (ja) | 2013-03-29 | 2013-03-29 | 作業負荷推定プログラム、作業負荷推定方法、及び情報処理装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013075026A JP2014199595A (ja) | 2013-03-29 | 2013-03-29 | 作業負荷推定プログラム、作業負荷推定方法、及び情報処理装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2014199595A true JP2014199595A (ja) | 2014-10-23 |
Family
ID=52356438
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013075026A Pending JP2014199595A (ja) | 2013-03-29 | 2013-03-29 | 作業負荷推定プログラム、作業負荷推定方法、及び情報処理装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2014199595A (ja) |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017039018A1 (ja) * | 2015-09-03 | 2017-03-09 | 株式会社ニコン | 作業管理装置、作業管理方法および作業管理プログラム |
| JP2017068429A (ja) * | 2015-09-29 | 2017-04-06 | 富士重工業株式会社 | 作業負担評価装置、作業負担評価方法 |
| JP2017068428A (ja) * | 2015-09-29 | 2017-04-06 | 富士重工業株式会社 | 作業負担評価装置、作業負担評価方法 |
| JP2017068430A (ja) * | 2015-09-29 | 2017-04-06 | 富士重工業株式会社 | 適応性評価装置、適応性評価方法 |
| JP2018039076A (ja) * | 2016-09-07 | 2018-03-15 | オムロン株式会社 | 制御装置、システム、制御方法およびプログラム |
| KR20180125159A (ko) * | 2016-04-26 | 2018-11-22 | 미쓰비시덴키 가부시키가이샤 | 작업원 관리 장치 |
| WO2020217381A1 (ja) * | 2019-04-25 | 2020-10-29 | 三菱電機株式会社 | 作業支援装置及び作業支援システム |
| JP2021002078A (ja) * | 2019-06-19 | 2021-01-07 | 大和ハウス工業株式会社 | 作業補助装置の評価システム |
| JP2021021973A (ja) * | 2019-07-24 | 2021-02-18 | 日本電気株式会社 | 重量推定装置、重量推定方法、および重量推定プログラム |
| JP2022048014A (ja) * | 2020-09-14 | 2022-03-25 | 株式会社東芝 | 負荷推定装置、方法およびプログラム |
| JP7401069B1 (ja) | 2023-06-20 | 2023-12-19 | 株式会社ゼスト | 稼働状況集計システム、稼働状況集計方法及びプログラム |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6130365A (ja) * | 1984-07-18 | 1986-02-12 | Toyota Motor Corp | 物流制御方法 |
| JP2004139515A (ja) * | 2002-10-21 | 2004-05-13 | Honda Motor Co Ltd | 製造ラインの工程評価方法 |
-
2013
- 2013-03-29 JP JP2013075026A patent/JP2014199595A/ja active Pending
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6130365A (ja) * | 1984-07-18 | 1986-02-12 | Toyota Motor Corp | 物流制御方法 |
| JP2004139515A (ja) * | 2002-10-21 | 2004-05-13 | Honda Motor Co Ltd | 製造ラインの工程評価方法 |
Cited By (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPWO2017039018A1 (ja) * | 2015-09-03 | 2018-06-21 | 株式会社ニコン | 作業管理装置、作業管理方法および作業管理プログラム |
| WO2017039018A1 (ja) * | 2015-09-03 | 2017-03-09 | 株式会社ニコン | 作業管理装置、作業管理方法および作業管理プログラム |
| JP2017068429A (ja) * | 2015-09-29 | 2017-04-06 | 富士重工業株式会社 | 作業負担評価装置、作業負担評価方法 |
| JP2017068428A (ja) * | 2015-09-29 | 2017-04-06 | 富士重工業株式会社 | 作業負担評価装置、作業負担評価方法 |
| JP2017068430A (ja) * | 2015-09-29 | 2017-04-06 | 富士重工業株式会社 | 適応性評価装置、適応性評価方法 |
| KR20180125159A (ko) * | 2016-04-26 | 2018-11-22 | 미쓰비시덴키 가부시키가이샤 | 작업원 관리 장치 |
| KR102206712B1 (ko) * | 2016-04-26 | 2021-01-22 | 미쓰비시덴키 가부시키가이샤 | 작업원 관리 장치 |
| JP2018039076A (ja) * | 2016-09-07 | 2018-03-15 | オムロン株式会社 | 制御装置、システム、制御方法およびプログラム |
| WO2018047592A1 (ja) * | 2016-09-07 | 2018-03-15 | オムロン株式会社 | 制御装置、システム、制御方法およびプログラム |
| CN108136592B (zh) * | 2016-09-07 | 2022-06-24 | 欧姆龙株式会社 | 控制装置、控制系统、控制方法及计算机可读存储介质 |
| CN108136592A (zh) * | 2016-09-07 | 2018-06-08 | 欧姆龙株式会社 | 控制装置、系统、控制方法及程序 |
| US11137747B2 (en) | 2016-09-07 | 2021-10-05 | Omron Corporation | Control system for a production line drive unit |
| WO2020217381A1 (ja) * | 2019-04-25 | 2020-10-29 | 三菱電機株式会社 | 作業支援装置及び作業支援システム |
| JPWO2020217381A1 (ja) * | 2019-04-25 | 2021-10-28 | 三菱電機株式会社 | 作業支援装置 |
| DE112019007257B4 (de) * | 2019-04-25 | 2025-08-21 | Mitsubishi Electric Corporation | Arbeits-assistenzeinrichtung |
| JP7086280B2 (ja) | 2019-04-25 | 2022-06-17 | 三菱電機株式会社 | 作業支援装置 |
| US11803795B2 (en) | 2019-04-25 | 2023-10-31 | Mitsubishi Electric Corporation | Work assist device |
| JP2021002078A (ja) * | 2019-06-19 | 2021-01-07 | 大和ハウス工業株式会社 | 作業補助装置の評価システム |
| JP7373308B2 (ja) | 2019-06-19 | 2023-11-02 | 大和ハウス工業株式会社 | 作業補助装置の評価システム |
| JP2021021973A (ja) * | 2019-07-24 | 2021-02-18 | 日本電気株式会社 | 重量推定装置、重量推定方法、および重量推定プログラム |
| JP7342489B2 (ja) | 2019-07-24 | 2023-09-12 | 日本電気株式会社 | 重量推定装置、重量推定方法、および重量推定プログラム |
| JP7414676B2 (ja) | 2020-09-14 | 2024-01-16 | 株式会社東芝 | 負荷推定装置、方法およびプログラム |
| JP2022048014A (ja) * | 2020-09-14 | 2022-03-25 | 株式会社東芝 | 負荷推定装置、方法およびプログラム |
| JP7401069B1 (ja) | 2023-06-20 | 2023-12-19 | 株式会社ゼスト | 稼働状況集計システム、稼働状況集計方法及びプログラム |
| JP2025001094A (ja) * | 2023-06-20 | 2025-01-08 | 株式会社ゼスト | 稼働状況集計システム、稼働状況集計方法及びプログラム |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2014199595A (ja) | 作業負荷推定プログラム、作業負荷推定方法、及び情報処理装置 | |
| Dalle Mura et al. | Optimizing ergonomics in assembly lines: A multi objective genetic algorithm | |
| US10414047B2 (en) | Method and a data processing system for simulating and handling of anti-collision management for an area of a production plant | |
| KR102068197B1 (ko) | 산업 오브젝트들의 멀티-핸드 파지들을 위한 핸드 포지션들을 예측하기 위한 방법들 및 시스템 | |
| Peruzzini et al. | Human-centred design of ergonomic workstations on interactive digital mock-ups | |
| US10679228B2 (en) | Systems, devices, and methods for predicting product performance in a retail display area | |
| Wang et al. | 3D standard motion time-based ergonomic risk analysis for workplace design in modular construction | |
| Alkan et al. | A lightweight approach for human factor assessment in virtual assembly designs: an evaluation model for postural risk and metabolic workload | |
| Shaikh et al. | Participatory ergonomics using VR integrated with analysis tools | |
| Brito et al. | Improving the production performance and ergonomic aspects using lean and agile concepts | |
| Turk et al. | Simulation-based time evaluation of basic manual assembly tasks | |
| Gonen et al. | Computer‐Aided ergonomic analysis for assembly unit of an agricultural device | |
| Lockett et al. | An automated maintainability prediction tool integrated with computer aided design | |
| WO2022138722A1 (ja) | 作業行動認識システムおよび作業行動認識方法 | |
| Hovanec et al. | Tecnomatix for successful application in the area of simulation manufacturing and ergonomics | |
| Hanson | Implementation of ergonomics evaluation methods in a multi-objective optimization framework | |
| Al Shehhi et al. | Modeling the ergonomics of Goods-to-Man order picking | |
| Udosen | Ergonomic workplace construction, evaluation and improvement by CADWORK | |
| Sun et al. | Ergonomics analysis of hand-held grinding operation working posture based on jack | |
| Zhao et al. | Virtual assembly simulation and ergonomics analysis for the industrial manipulator based on DELMIA | |
| Zhong et al. | Workstation suitability maps: Generating ergonomic behaviors on a population of virtual humans with multi-task optimization | |
| Arzi | Methods engineering: using rapid prototype and virtual reality techniques | |
| Goos et al. | Computer assisted ergonomic assembly cell design | |
| Annisa | Analysis of the working position of sandal operator using RULA and REBA approach at sisman corporation (SISCO) | |
| Pfeffer et al. | Virtual Ergonomics-Ergotyping in Virtual Environments |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20151204 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20161026 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20161108 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20161228 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170530 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170714 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20170815 |