JP2014227104A - 電動アシストステアリング装置 - Google Patents
電動アシストステアリング装置 Download PDFInfo
- Publication number
- JP2014227104A JP2014227104A JP2013109689A JP2013109689A JP2014227104A JP 2014227104 A JP2014227104 A JP 2014227104A JP 2013109689 A JP2013109689 A JP 2013109689A JP 2013109689 A JP2013109689 A JP 2013109689A JP 2014227104 A JP2014227104 A JP 2014227104A
- Authority
- JP
- Japan
- Prior art keywords
- steering
- steering wheel
- driver
- sensor
- return
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000001514 detection method Methods 0.000 claims description 8
- 230000007423 decrease Effects 0.000 claims description 4
- 230000007935 neutral effect Effects 0.000 description 15
- 230000003247 decreasing effect Effects 0.000 description 1
- 230000003111 delayed effect Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 238000000034 method Methods 0.000 description 1
- 239000000725 suspension Substances 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
Images





Landscapes
- Steering Control In Accordance With Driving Conditions (AREA)
- Power Steering Mechanism (AREA)
Abstract
【課題】ハンドル復元力を増加させたり、操舵系のフリクションを低減させて残留角を減らすとともに、運転者に違和感を与えることなく、ハンドルの戻り速度を抑制すること。【解決手段】ハンドルの戻し操作が運転者の手放し操作によるものか、運転者の手動操作によるものかを判別し(ST3)、ハンドルの戻し操作が運転者の手放し操作によるものと判別した場合に限り(ST3:YES)、ステアリング戻り速度のみを低下させるようにステアリング復元力を逆アシストする(ST4)。【選択図】図2
Description
本発明は、車両に搭載される電動アシストステアリング装置に関する。
例えば自動車が左折する際に、運転者はハンドルを左に切った後、そのハンドルから手を放して、ホイールアライメントによるハンドル復元力を利用してハンドルを中立位置に戻すことがある。実際には、このようにハンドルから手を放してハンドルを戻す操作(以下「手放し操作」という。)では、操舵系のフリクションがあるため、ハンドルは中立位置まで戻らず、中立位置に対して一定の操舵角(残留角)だけずれた位置にしか戻らない。
サスペンションの設定によりハンドル復元力を増加させたり、操舵系のフリクションを低減させることで、残留角を減らすことはできる。しかし、そうすれば、ハンドルの戻り速度が大きくなり、ハンドルの挙動が不安定になる。
そこで、本願発明者は、ハンドル復元力を増加させたり、操舵系のフリクションを低減させて残留角を減らすとともに、ハンドルの戻し操作時にアシストモータによりハンドル復元力を逆アシストすることで、ハンドルの戻り速度を抑制し、ハンドルの挙動を安定化させることができることを創案した。
ところが、ハンドルの戻し操作が運転者の手放し操作による場合は、ハンドルの戻り速度が抑制され、ハンドルの挙動は安定化するものの、ハンドルの戻し操作が運転者の手動操作による場合には、運転者に違和感(引っ掛かり感)を感じさせてしまう点で問題がある。
ところで、特許文献1には、操舵角センサの出力値からステアリング戻し制御トルクを算出し、それを基本目標アシストトルクに加算してアシストトルクを算出するステアリング戻し制御を行う電動アシストステアリング装置が開示されている。この装置では、操舵角が所定角度以下の時はステアリング戻し制御トルクを反操舵方向に設定し、所定角度以上の時はステアリング制御トルクを零又は操舵方向に設定するようにしている。しかし、車両が左折又は右折した後、直進する際に、ハンドルを中立位置に向かって戻す操作が、運転者の手動操作によるものか、運転者の手放し操作によるものかを判別することはなく、操舵角のみでステアリング戻し制御トルクを決めている。このため、手動操作又は手放し操作の何れかにおいて運転者に違和感を与える可能性が高い。
本発明は、既述の課題に鑑みてなされたものであり、ハンドル復元力を増加させたり、操舵系のフリクションを低減させて残留角を減らすとともに、運転者に違和感を与えることなく、ハンドルの戻り速度を抑制することができる電動アシストステアリング装置を提供することを目的とする。
本発明の電動アシストステアリング装置は、ハンドルの戻し操作が運転者の手放し操作によるものか、運転者の手動操作によるものかを判別する判別手段と、該判別手段によってハンドルの戻し操作が運転者の手放し操作によるものと判別した場合に限り、ステアリング戻り速度のみを低下させるようにステアリング復元力を逆アシストする逆アシスト制御手段と、を備えることを特徴としている。
かかる構成を備える電動アシストステアリング装置によれば、ハンドルの戻し操作が運転者の手放し操作による場合に限り、ハンドル復元力が逆アシストされ、ハンドルの戻し操作が運転者の手動操作による場合は、ハンドル復元力が逆アシストされないので、運転者に違和感を与えることなく、残留角を減らすことができる。また、ハンドルの戻し操作が運転者の手放し操作による場合に限り、ハンドル復元力が逆アシストされるので、システムを簡素化し易くなる。
前記判別手段は、例えば、ステアリングシャフトにおいて操舵角又は軸トルクを検出するためのハンドル側センサと、同ステアリングシャフトにおいて前記ハンドル側センサよりタイヤ側に設けられ、操舵角又は軸トルクを検出するためのタイヤ側センサと、を有し、前記ハンドル側センサの出力値の変化が前記タイヤ側センサの出力値の変化より先行しているときに、ハンドルの戻し操作が運転者の手動操作によるものと判別し、前記タイヤ側センサの出力値の変化が前記ハンドル側センサの出力値の変化より先行しているときに、ハンドルの戻し操作が運転者の手放し操作によるものと判別するもの、とすることができる。
かかる構成を備える電動アシストステアリング装置によれば、ハンドルの戻し操作が運転者の手放し操作によるものであることを簡易な構成(ハンドル側センサおよびタイヤ側センサ)で検出することができる。
前記判別手段は、例えば、ステアリングシャフトのねじれ方向を検出するためのねじれ方向検出センサと、ハンドルの操舵方向を検出するための操舵方向検出センサと、を有し、前記ステアリングシャフトにおいて、タイヤ側に対するハンドル側のねじれ方向がハンドルの操舵方向と一致する場合は、ハンドルの戻し操作が運転者の手動操作によるものと判別し、タイヤ側に対するハンドル側のねじれ方向がハンドルの操舵方向と相違する場合は、ハンドルの戻し操作が運転者の手放し操作によるものと判別するもの、とすることができる。
かかる構成を備える電動アシストステアリング装置によれば、ハンドルの戻し操作が運転者の手放し操作によるものであることを簡易な構成(ねじれ方向検出センサおよび操舵方向検出センサ)で検出することができる。
本発明によれば、ハンドルの戻し操作が運転者の手放し操作による場合に限り、ハンドル復元力に対する逆アシスト制御が行われ、ハンドルの戻し操作が運転者の手動操作による場合は、ハンドル復元力に対する逆アシスト制御が行われないので、運転者に違和感を与えることなく、残留角を減らすことができる。
以下、本発明の実施の形態に係る電動アシストステアリング装置について図面を参照しながら説明する。
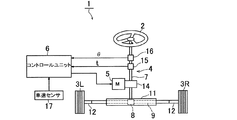
図1に示すように、本発明の実施の形態に係る電動アシストステアリング装置1は、ハンドル2の操舵操作により転舵輪3L,3Rを転舵するステアリング機構4と、ステアリング機構4に組み付けられ操舵をアシストするアシストモータ5と、ハンドル2の操作状態に応じてアシストモータ5の作動を制御するコントロールユニット6とで主に構成されている。
ステアリング機構4は、上端部にハンドル2が回転一体に接続されたステアリングシャフト7を備え、このステアリングシャフト7の下端に、ピニオンギヤ8が回転一体に設けられている。ピニオンギヤ8は、ラックバー9のギヤ部と噛み合っている。ラックバー9は、そのギヤ部がラックハウジング11内に収納され、その左右両端部がラックハウジング11から露出してタイロッド12の一端部に連結されている。左右のタイロッド12の他端部は、左右前輪3L,3Rに設けられたナックル(不図示)に接続されている。これにより、左右前輪3L,3Rは、ステアリングシャフト7の軸線回りの回転に伴うラックバー9の軸線方向の変位に応じて左右に操舵される。
ステアリングシャフト7には減速ギヤ14を介してアシストモータ5が組み付けられている。アシストモータ5は、その出力軸の回転により減速ギヤ14を介してステアリングシャフト7を回転駆動して、ハンドル2の回動操作に対してアシスト力、又は後述する逆アシスト力を付与する。
ステアリングシャフト7には、ハンドル2と減速ギヤ14との間にトルクセンサ(タイヤ側センサ)15が設けられている。トルクセンサ15は、例えば、ステアリングシャフト7の中間部に介装されたトーションバー(図示略)の捩れ角度をレゾルバ等により検出し、この捩れ角に基づいてステアリングシャフト7に働いた操舵トルクtを検出する。また、ステアリングシャフト7には、ハンドル2とトルクセンサ15との間に操舵角センサ(ハンドル側センサ)16が設けられている。操舵角センサ16は、ステアリングシャフト7の回転角度に基づいて、操舵角ゼロとなる中立位置からの回転角度を表す操舵角θを検出する。操舵角θは、正負の値により中立位置からの操舵方向が識別される。例えば、中立位置から右方向の操舵角θを正の値で、中立位置から左方向の操舵角θを負の値で示すことができる。
コントロールユニット6は、車速センサ17からの車速情報、トルクセンサ15からの操舵トルク情報、操舵角センサ16からの操舵角情報等に基づいて、アシストモータ5の目標制御量を演算するための演算回路、演算された目標制御量に応じてアシストモータ5を駆動するためのモータ駆動回路等で構成される。
つぎに、上記構成を備える電動アシストステアリング装置1が、自動車の左旋回(左折)又は右旋回(右折)に際して、通常のアシスト制御から逆アシスト制御に移行する際の手順を図2のフローチャートに基づいて説明する。なお、逆アシスト制御は、後述するST4で実行され、それ以外のときの操舵時には、通常のアシスト制御が実行されるものとする。
運転者が自動車走行中に、ハンドル2を右又は左へ所定量以上回転(操舵)すると、コントロールユニット6は、操舵角センサ16の出力に基づきハンドル2が右又は左へ操舵されたことを検出する(ST1)。
つぎに、コントロールユニット6は、操舵角センサ16の出力に基づきハンドル戻し操作が行われているか否かを判定する。すなわち、操舵角が増加している又は操舵角が保持されている場合は、ハンドル戻し操作ではないと判定する一方(ST2:NO)、操舵角が減少している場合は、ハンドル戻し操作であると判定する(ST2:YES)。ハンドル戻し操作ではないと判定した場合は、コントロールユニット6は、通常のアシスト制御を行う。
一方、ST2でハンドル戻し操作であると判定した場合は、コントロールユニット6は、ハンドルの戻し操作が運転者の手放し操作によるものであるか、運転者の手動操作によるものであるかを判別する(ST3)。この判別は、例えば、ステアリングシャフト7に設けられた操舵角センサ16、トルクセンサ15の出力値に基づいてなされる。すなわち、ハンドル側センサ(操舵角センサ16)の出力値の変化が、ハンドル側センサよりタイヤ側に設けられたタイヤ側センサ(トルクセンサ15)の出力値の変化より先行しているときには、ハンドルの戻し操作が運転者の手動操作によるものと判別し、タイヤ側センサの出力値の変化がハンドル側センサの出力値の変化より先行しているときには、ハンドルの戻し操作が運転者の手放し操作によるものと判別する。例えば図4(a)は、ハンドル側センサ(操舵角センサ16)の出力値18の変化がタイヤ側センサ(トルクセンサ15)の出力値19の変化より先行している例を示し、図4(b)は、タイヤ側センサ(トルクセンサ15)の出力値19の変化がハンドル側センサ(操舵角センサ16)の出力値19の変化より先行している例を示している。なお、図4においては、両出力値18,19はそれぞれ1つの山を形成しているが、本ステップST3の判定は、山を形成する前に行うこともできる。例えば図4(a)の時間T1〜T2の間の両出力値18,19の変化に基づき、ハンドル側センサの出力値18がタイヤ側センサの出力値19よりも先行していると判定するようにしてもよい。なお、判定タイミングは遅くなるものの、両出力値18,19の山が形成された後に判定を行ってもよい。
コントロールユニット6は、ST3において、運転者の手放し操作が行われていると判別した場合は、ステアリング戻り速度のみを低下させるように、ステアリング復元力を逆アシストするようにアシストモータ5を駆動する(ST4)。これにより、図5に示すように、時間軸に対する操舵角の変化の傾斜が緩やかになり、手放し操作時におけるハンドル2の挙動が安定化する。この逆アシスト制御は、操舵角が中立位置近傍に戻るまで(例えば操舵角が中立位置から所定角以内に戻るまで)行われる(ST5)。
一方、ST3において、否定判定をした場合、つまり、ハンドルの戻し操作が運転者の手動操作によるものと判定した場合は、通常のアシスト制御が行われる。運転者の手動操作によりハンドルの戻し操作が行われているときに、逆アシスト制御を行うと、運転者に違和感(引っ掛かり感)を感じさせてしまうからである。
図3は、自動車が左旋回(左折)又は右旋回(右折)する際に、運転者の手放し操作によりハンドル戻し操作が行わる場合の一般的な動作の流れを示すフローチャートである。
自動車の直進中に運転者がハンドル2に左回り又は右回りの操舵力を付加すると(ST21)、ハンドル2およびステアリングシャフト7は、一方に回転し(ST22)、ステアリングシャフト7の回転に伴って左右前輪3L,3Rは、左又は右に操舵され、自動車は左旋回又は右旋回を開始する。そして、運転者がハンドル2を一定の操舵角で保舵した後(ST23)、ハンドル2から手を放すと操舵力は低下し(ST24)し、手放し操作により、ハンドル2、ステアリングシャフト7等がハンドル復元力により中立位置に向かって戻る(ST25)。そして、残留角が発生する場合は、運転者の手動操作によりハンドル2は中立位置に戻され、残留角が殆ど発生しない場合は、引き続き手放し操作によりハンドル2は中立位置に戻され、自動車は直進状態に移行する。
このような旋回動作において、コントロールユニット6は、上記ST21およびST22では、操舵角が増加し、上記ST23では操舵角が保持されることから、ハンドル戻し操作ではないと判定し(ST2:NO)、通常のアシスト制御を行う。また、コントロールユニット6は、上記ST25では、タイヤ側センサの出力値の変化がハンドル側センサの出力値の変化より先行することから、ハンドルの戻し操作が手放し操作によるものと判別し(ST3:YES)、その間、逆アシスト制御を行う(ST4、ST5:NO)。また、コントロールユニット6は、上記ST26では、操舵角が中立位置近傍に戻ったことから(ST5:YES)、逆アシスト制御を終了する。
<他の実施形態>
既述の実施形態では、ハンドル側センサとして操舵角センサ16が用いられ、タイヤ側センサとして軸トルクを検出するためのトルクセンサ15が用いられていたが、ハンドル側センサとして操舵角センサの代わりにトルクセンサを用いてもよいし、タイヤ側センサとしてトルクセンサの代わりに操舵角センサを用いてもよい。
既述の実施形態では、ハンドル側センサとして操舵角センサ16が用いられ、タイヤ側センサとして軸トルクを検出するためのトルクセンサ15が用いられていたが、ハンドル側センサとして操舵角センサの代わりにトルクセンサを用いてもよいし、タイヤ側センサとしてトルクセンサの代わりに操舵角センサを用いてもよい。
また、既述の実施形態においては、ST3において、ハンドルの戻し操作が運転者の手放し操作であるか、運転者の手動操作であるかの判定をハンドル側センサ出力値の変化がタイヤ側センサの出力値の変化より先行しているか否かに基づいて行ったが、トルクセンサ15の出力値の正負および操舵角センサ16の出力値の正負に基づいて行ってもよい。すなわち、ハンドル戻し操作である場合(ST2:YES)に、トルクセンサ15の出力値の正負と操舵角センサ16の出力値の正負に基づき、図6の表の下段に示すように、ステアリングシャフト7において、タイヤ側に対するハンドル側のねじれ方向がハンドル2の操舵方向(ハンドルの戻り方向)と一致すると判断した場合は、ハンドル2の戻し操作が運転者の手動操作によるものと判別する。一方、図6の表の上段に示すように、タイヤ側に対するハンドル側のねじれ方向がハンドル2の操舵方向(ハンドルの戻り方向)と相違すると判断した場合は、ハンドル2の戻し操作が運転者の手放し操作によるものと判別する。なお、図6中の仮想線20は、ステアリングシャフト7のねじれ方向を分かり易く表すために記載したものであり、ステアリングシャフト7にねじれが生じていない場合は、仮想線20は、ステアリングシャフト7の軸線と平行に直線状に延びた状態となる。
以上の説明から明らかなように、既述の実施の形態に係る電動アシストステアリング装置1によれば、ハンドル2の戻し操作が運転者の手放し操作による場合に限り、ハンドル復元力に対する逆アシスト制御を行い、ハンドル2の戻し操作が運転者の手動操作による場合は、ハンドル復元力に対する逆アシスト制御を行わないので、運転者に違和感を与えることなく、残留角を減らすことができる。
本発明は、例えば、自動車に搭載される電動アシストステアリング装置に適用することができる。
1 電動アシストステアリング装置
2 ハンドル
5 アシストモータ
6 コントロールユニット
7 ステアリングシャフト
15 トルクセンサ(ねじれ方向検出センサ)
16 操舵角センサ(操舵方向検出センサ)
18 ハンドル側センサの出力値
19 タイヤ側センサの出力値
2 ハンドル
5 アシストモータ
6 コントロールユニット
7 ステアリングシャフト
15 トルクセンサ(ねじれ方向検出センサ)
16 操舵角センサ(操舵方向検出センサ)
18 ハンドル側センサの出力値
19 タイヤ側センサの出力値
Claims (3)
- ハンドルの戻し操作が運転者の手放し操作によるものか、運転者の手動操作によるものかを判別する判別手段と、
該判別手段によってハンドルの戻し操作が運転者の手放し操作によるものと判別した場合に限り、ステアリング戻り速度のみを低下させるようにステアリング復元力を逆アシストする逆アシスト制御手段と、
を備えることを特徴とする電動アシストステアリング装置。 - 請求項1に記載の電動アシストステアリング装置において、
前記判別手段は、
ステアリングシャフトにおいて操舵角又は軸トルクを検出するためのハンドル側センサと、
同ステアリングシャフトにおいて前記ハンドル側センサよりタイヤ側に設けられ、操舵角又は軸トルクを検出するためのタイヤ側センサと、
を有し、
前記ハンドル側センサの出力値の変化が前記タイヤ側センサの出力値の変化より先行しているときに、ハンドルの戻し操作が運転者の手動操作によるものと判別し、
前記タイヤ側センサの出力値の変化が前記ハンドル側センサの出力値の変化より先行しているときに、ハンドルの戻し操作が運転者の手放し操作によるものと判別することを特徴とする電動アシストステアリング装置。 - 請求項1に記載の電動アシストステアリング装置において、
前記判別手段は、
ステアリングシャフトのねじれ方向を検出するためのねじれ方向検出センサと、
ハンドルの操舵方向を検出するための操舵方向検出センサと、
を有し、
前記ステアリングシャフトにおいて、タイヤ側に対するハンドル側のねじれ方向がハンドルの操舵方向と一致する場合は、ハンドルの戻し操作が運転者の手動操作によるものと判別し、タイヤ側に対するハンドル側のねじれ方向がハンドルの操舵方向と相違する場合は、ハンドルの戻し操作が運転者の手放し操作によるものと判別することを特徴とする電動アシストステアリング装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013109689A JP2014227104A (ja) | 2013-05-24 | 2013-05-24 | 電動アシストステアリング装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013109689A JP2014227104A (ja) | 2013-05-24 | 2013-05-24 | 電動アシストステアリング装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2014227104A true JP2014227104A (ja) | 2014-12-08 |
Family
ID=52127337
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013109689A Pending JP2014227104A (ja) | 2013-05-24 | 2013-05-24 | 電動アシストステアリング装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2014227104A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN118790341A (zh) * | 2024-08-09 | 2024-10-18 | 中国第一汽车股份有限公司 | 一种方向盘回正方法、车辆及储存介质 |
| WO2025010589A1 (zh) * | 2023-07-10 | 2025-01-16 | 舍弗勒技术股份两合公司 | 转向控制方法和装置 |
-
2013
- 2013-05-24 JP JP2013109689A patent/JP2014227104A/ja active Pending
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2025010589A1 (zh) * | 2023-07-10 | 2025-01-16 | 舍弗勒技术股份两合公司 | 转向控制方法和装置 |
| CN118790341A (zh) * | 2024-08-09 | 2024-10-18 | 中国第一汽车股份有限公司 | 一种方向盘回正方法、车辆及储存介质 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3409562B1 (en) | Steering controller | |
| JP6030459B2 (ja) | 車両の操舵制御装置 | |
| JP5962312B2 (ja) | 電動パワーステアリング制御装置 | |
| JP6760569B2 (ja) | 車両制御装置、車両制御方法および電動パワーステアリング装置 | |
| JP7099892B2 (ja) | 操舵制御装置 | |
| US20070288143A1 (en) | Vehicle steering system | |
| CN102666255B (zh) | 用于eps转向系统的中心感觉的确定 | |
| CN104884336B (zh) | 车辆的行驶控制装置 | |
| JP2003175850A (ja) | 電動パワーステアリング装置の制御装置 | |
| JP3176899B2 (ja) | 車両用操舵装置 | |
| JP5131324B2 (ja) | 車両用操舵装置 | |
| CN105460076A (zh) | 电动动力转向装置 | |
| CN114194283B (zh) | 转向操作控制装置 | |
| JP2009057017A (ja) | 電動パワーステアリング装置 | |
| JP4862493B2 (ja) | パワーステアリング装置 | |
| WO2015141253A1 (ja) | 電動パワーステアリング装置及び電動パワーステアリング装置の制御装置 | |
| CN101287639A (zh) | 车辆转向设备 | |
| JP2014227104A (ja) | 電動アシストステアリング装置 | |
| JP2009184370A (ja) | 電動パワーステアリング装置 | |
| JP6279367B2 (ja) | パワーステアリング装置 | |
| JP2010188909A (ja) | 電動パワーステアリング装置 | |
| JP2007230527A (ja) | ステアリング装置、自動車、及びステアリング制御方法 | |
| JP4419932B2 (ja) | 車両転舵制御装置 | |
| JP2020006832A (ja) | 操舵制御装置 | |
| JP4018794B2 (ja) | 車両用操舵装置 |