JP2015096830A - 基板処理装置および基板処理方法 - Google Patents
基板処理装置および基板処理方法 Download PDFInfo
- Publication number
- JP2015096830A JP2015096830A JP2013236903A JP2013236903A JP2015096830A JP 2015096830 A JP2015096830 A JP 2015096830A JP 2013236903 A JP2013236903 A JP 2013236903A JP 2013236903 A JP2013236903 A JP 2013236903A JP 2015096830 A JP2015096830 A JP 2015096830A
- Authority
- JP
- Japan
- Prior art keywords
- substrate
- image
- holding
- images
- holding state
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images









Landscapes
- Length Measuring Devices By Optical Means (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
- Cleaning Or Drying Semiconductors (AREA)
Abstract
【解決手段】基板Wを略水平姿勢に保持する保持手段11と、保持手段11を略鉛直軸周りに回転させる回転手段113と、保持手段11を収容する処理空間SPを形成する処理室90と、処理室90内に照明光を導入する照明手段71と、保持手段11に保持された基板Wを撮像する撮像手段72と、撮像手段72により撮像された画像から、基板W表面のうち照明手段71の正反射像を含まない少なくとも一部を含む領域を比較対象領域として、基板Wの回転位相角を互いに異ならせて撮像した複数の画像間における比較対象領域の画像内容の比較結果に基づき、保持手段11による基板Wの保持状態を判定する判定手段81,86とを備える基板処理装置である。
【選択図】図3
Description
図5および図6は第1の例における判定原理を説明する図である。撮像結果に基づく保持状態の判定の第1の例では、スピンチャック11上での基板Wの傾きにより生じる基板W表面における輝度の変化に基づき保持状態の判定を行う。すなわち、この例における特徴量は、基板W表面の輝度である。
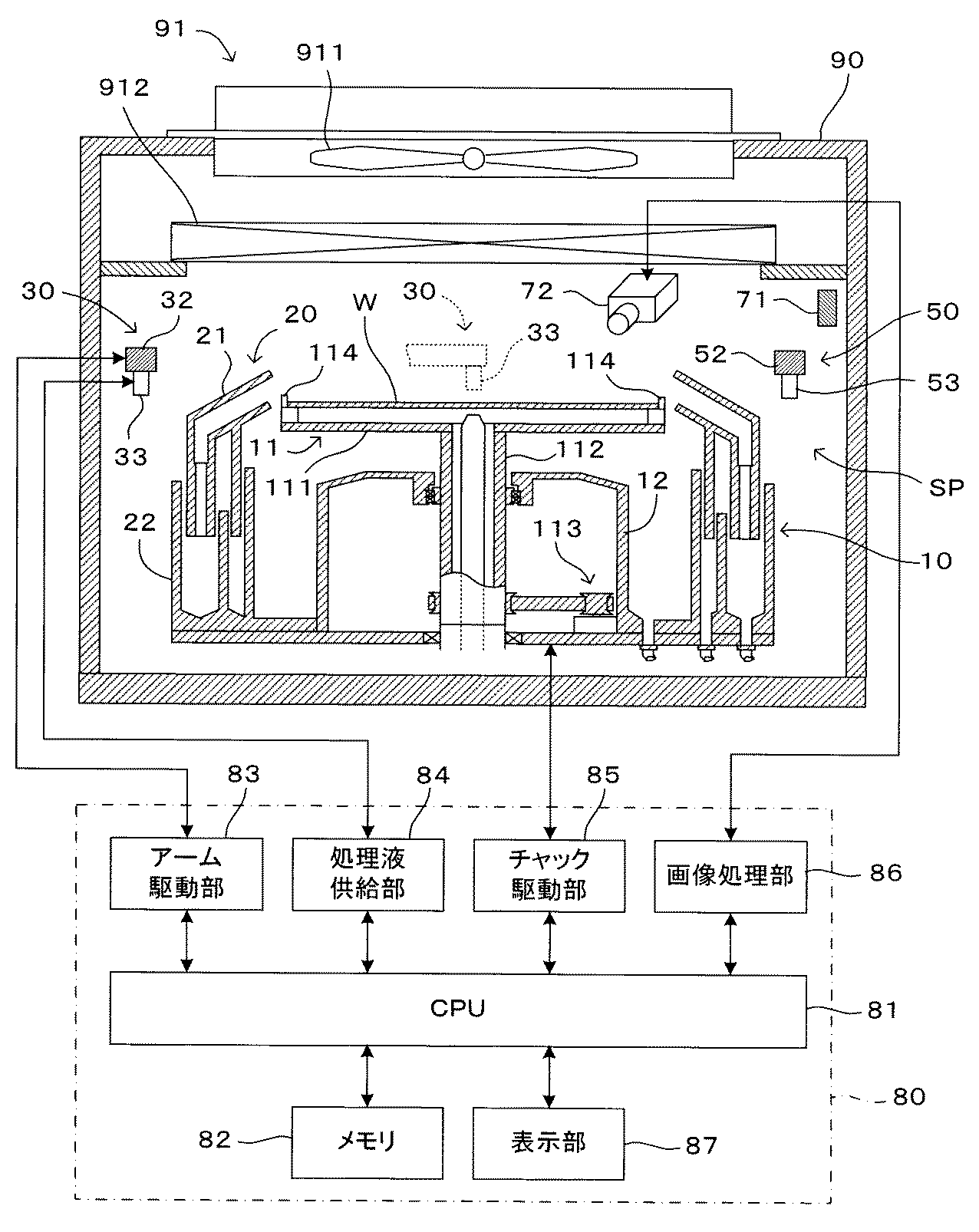
図7および図8は第2の例における判定原理を説明する図である。この例は、基板Wの表面が鏡面に近い高い反射率を有している場合に特に有効である。このような場合、チャンバー90内で保持された基板Wの表面には、照明部71からの光で照明された処理空間SP内で基板Wの表面に臨む位置に設けられた構造物の像が映り込む。例えば図7(a)に示すように、処理空間SPの上部隔壁に該当するチャンバー90の天井部分に形状既知の構造物92を設けておけば、基板W表面に映り込んだ構造物92の像がカメラ72により撮像される。
以下の数式により、各画像における領域R2のテンプレートとの類似度を表すことができる。左辺の類似度RNCCが1に近いほど、2つの画像の類似度が高い、つまり撮像された画像における構造物92の像Ibの位置がテンプレートにおける像Iaの位置に近いことを表す。この場合、左辺の値RNCCがマッチングスコアに相当する。
以下の数式により、各画像における領域R2のテンプレートとの類似度を表すことができる。左辺の値RSSDの値が小さいほど、2つの画像の類似度が高いことを表す。この場合、左辺の値RSSDがマッチングスコアに相当する。
以下の数式により、各画像における領域R2のテンプレートとの類似度を表すことができる。この場合も、左辺の値RSADの値が小さいほど、2つの画像の類似度が高いことを表す。この場合、左辺の値RSADがマッチングスコアに相当する。
上記した2つの例は、主として基板Wの傾きを検出するのに適した態様である。一方、次に説明する第3の例は、上記例と同様に基板Wの傾きに対応するほか、特に円形の基板Wが偏心した、つまり基板Wの幾何学的な中心と回転中心とがずれた状態でスピンチャック11に保持された状態を検出するのに好適なものである。
以上のように、上記実施形態では、スピンチャック11に保持された基板Wをカメラ72により撮像し、その撮像結果に基づいて基板Wの保持状態を判定している。その具体例として示した上記各例では、撮像された画像のうち一部領域の画像内容を、基板Wの回転位相角を互いに異ならせた複数の画像間で相対的に比較する。具体的には、第1の例においては、基板Wの一部領域R1における輝度の変動量に基づき基板Wの保持状態を判定する。また、第2の例においては、チャンバー90により囲まれた処理空間SP内の構造物92が基板W表面に映り込んでなる像Iaの位置変動量に基づき基板Wの保持状態を判定する。また、第3の例においては、基板Wの周端部を含む領域R3において基板Wが占める領域を画素の数を計数することにより求めて基板Wの保持状態を判定する。
1A〜1D 基板処理ユニット(基板処理装置)
11 スピンチャック(保持手段)
71 照明部(照明手段)
72 カメラ(撮像手段)
81 CPU(判定手段)
85 チャック駆動部(回転手段)
86 画像処理部(判定手段)
90 チャンバー(処理室)
92 構造物(特定部位、位置基準マーク)
111 スピンベース
113 チャック回転機構(回転手段)
114 チャックピン
R1、R2、R3 比較対象領域
SP 処理空間
Th1 第1閾値
Th2 第2閾値
Th3 第3閾値
W 基板
Claims (16)
- 基板を略水平姿勢に保持する保持手段と、
前記保持手段を略鉛直軸周りに回転させる回転手段と、
前記保持手段を収容する処理空間を形成する処理室と、
前記処理室内に照明光を導入する照明手段と、
前記保持手段に保持された前記基板を撮像する撮像手段と、
前記撮像手段により撮像された画像から、前記基板表面のうち前記照明手段の正反射像を含まない少なくとも一部を含む領域を比較対象領域として、前記基板の回転位相角を互いに異ならせて撮像した複数の画像間における前記比較対象領域の画像内容の比較結果に基づき、前記保持手段による前記基板の保持状態を判定する判定手段と
を備える基板処理装置。 - 前記判定手段は、前記複数の画像間での前記比較対象領域の輝度の比較結果に基づき前記保持状態を判定する請求項1に記載の基板処理装置。
- 前記判定手段は、前記複数の画像のうち前記比較対象領域の輝度が最も高いものと最も低いものとの間での輝度値の差が、所定の第1閾値以内であれば前記保持状態が正常であると判定する一方、前記輝度値の差が前記第1閾値を超える場合には前記保持状態が異常であると判定する請求項1または2に記載の基板処理装置。
- 前記判定手段は、一の前記画像における前記比較対象領域に含まれる各画素の画素値の総和と、他の一の前記画像における前記比較対象領域に含まれる各画素の画素値の総和との差を、当該2つの画像間での前記輝度値の差とする請求項2または3に記載の基板処理装置。
- 前記撮像手段は、前記基板の表面に映り込む前記処理室内の特定部位の像を含む画像を撮像し、
前記判定手段は、撮像された前記基板表面のうち前記特定部位の像を含む領域を前記比較対象領域として、前記複数の画像間における前記特定部位の像の位置の比較結果に基づき前記保持状態を判定する請求項1に記載の基板処理装置。 - 前記判定手段は、前記保持手段に正常に保持された前記基板における前記特定部位の像の位置に関する情報を予め保持しており、該情報により特定される位置と、前記複数の画像それぞれにおける前記特定部位の像の位置との位置ずれ量が所定の第2閾値以内であれば前記保持状態が正常であると判定する一方、前記位置ずれ量が前記第2閾値を超える場合には前記保持状態が異常であると判定する請求項5に記載の基板処理装置。
- 前記判定手段は、前記複数の画像間における前記特定部位の像の相対的な位置ずれ量の最大値が所定の第3閾値以内であれば前記保持状態が正常であると判定する一方、前記位置ずれ量が前記第3閾値を超える場合には前記保持状態が異常であると判定する請求項5に記載の基板処理装置。
- 前記処理室内の前記基板表面に臨む位置に、前記特定部位として機能する位置基準マークが設けられている請求項5ないし7のいずれかに記載の基板処理装置。
- 前記比較対象領域が前記基板の周端部の一部を含み、前記判定手段は、前記比較対象領域のうち前記基板が占める面積の大きさを前記複数の画像間で比較して前記保持状態を判定する請求項1に記載の基板処理装置。
- 前記判定手段は、前記複数の画像のうち前記比較対象領域に占める前記基板の面積が最も高いものと最も低いものとの間での面積差が所定の第4閾値以内であれば前記保持状態が正常であると判定する一方、前記面積差が前記第4閾値を超える場合には前記保持状態が異常であると判定する請求項9に記載の基板処理装置。
- 前記判定手段は、前記比較対象領域に含まれる各画素のうち前記基板に対応する画素の数を、前記比較対象領域に占める前記基板の面積とする請求項9または10に記載の基板処理装置。
- 前記撮像手段は、前記処理室内で、前記照明光の前記基板表面による正反射光が入射しない位置に配置される請求項1ないし11のいずれかに記載の基板処理装置。
- 処理室内で基板を略水平姿勢に保持する保持手段に、前記基板を保持させる工程と、
前記基板を照明手段により照明する工程と、
前記保持手段に保持された前記基板の画像を、前記基板の鉛直軸周りの回転位相角を互いに異ならせて複数撮像する工程と、
撮像された複数の前記画像の各々について、前記基板表面のうち照明光の正反射光成分を含まない少なくとも一部を含む領域を比較対象領域とし、前記複数の画像間における前記比較対象領域の画像内容の比較結果に基づき、前記保持手段による前記基板の保持状態を判定する工程と
を備える基板処理方法。 - 前記複数の画像間での前記比較対象領域の輝度の比較結果に基づき前記保持状態を判定する請求項13に記載の基板処理方法。
- 前記複数の画像のそれぞれは、前記基板の表面に映り込む前記処理室内の特定部位の像を含むものであり、
撮像された前記基板表面のうち前記特定部位の像を含む領域を前記比較対象領域として、前記複数の画像間における前記特定部位の像の位置の比較結果に基づき前記保持状態を判定する請求項13に記載の基板処理方法。 - 前記比較対象領域が前記基板の周端部の一部を含み、前記比較対象領域のうち前記基板が占める面積の大きさを前記複数の画像間で比較して前記保持状態を判定する請求項13に記載の基板処理方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013236903A JP2015096830A (ja) | 2013-11-15 | 2013-11-15 | 基板処理装置および基板処理方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013236903A JP2015096830A (ja) | 2013-11-15 | 2013-11-15 | 基板処理装置および基板処理方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2015096830A true JP2015096830A (ja) | 2015-05-21 |
Family
ID=53374190
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013236903A Pending JP2015096830A (ja) | 2013-11-15 | 2013-11-15 | 基板処理装置および基板処理方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2015096830A (ja) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017183498A (ja) * | 2016-03-30 | 2017-10-05 | 東京エレクトロン株式会社 | 基板処理装置、及び基板処理装置の撮像方法 |
| US10402997B2 (en) | 2015-10-27 | 2019-09-03 | SCREEN Holdings Co., Ltd. | Displacement detecting apparatus, displacement detecting method and substrate processing apparatus |
| CN111009477A (zh) * | 2018-10-05 | 2020-04-14 | 株式会社斯库林集团 | 基板处理方法及基板处理装置 |
| JP2020061417A (ja) * | 2018-10-05 | 2020-04-16 | 東京エレクトロン株式会社 | 基板処理装置及び検査方法 |
| JP2021141233A (ja) * | 2020-03-06 | 2021-09-16 | 株式会社Screenホールディングス | 基板処理装置、および、基板処理方法 |
| WO2021192738A1 (ja) * | 2020-03-27 | 2021-09-30 | 株式会社Screenホールディングス | 基板処理装置、および、基板処理方法 |
| WO2023127240A1 (ja) * | 2021-12-27 | 2023-07-06 | 株式会社Screenホールディングス | 動作監視方法および製造装置 |
| JPWO2023243438A1 (ja) * | 2022-06-16 | 2023-12-21 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000298862A (ja) * | 1999-04-14 | 2000-10-24 | Pioneer Electronic Corp | 液晶チルトサーボ装置 |
| JP2000323555A (ja) * | 1999-05-10 | 2000-11-24 | Nissin High Voltage Co Ltd | 半導体ウェーハ保持用アダプタに装填されたウェーハの異常検出方法及び検出装置 |
| JP2007251143A (ja) * | 2006-02-15 | 2007-09-27 | Olympus Corp | 外観検査装置 |
| JP2011145171A (ja) * | 2010-01-14 | 2011-07-28 | Nikon Corp | 形状検出装置 |
| JP2013110270A (ja) * | 2011-11-21 | 2013-06-06 | Tokyo Electron Ltd | 基板処理装置及び基板処理方法並びに基板処理プログラムを記憶したコンピュータ読み取り可能な記憶媒体 |
-
2013
- 2013-11-15 JP JP2013236903A patent/JP2015096830A/ja active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000298862A (ja) * | 1999-04-14 | 2000-10-24 | Pioneer Electronic Corp | 液晶チルトサーボ装置 |
| JP2000323555A (ja) * | 1999-05-10 | 2000-11-24 | Nissin High Voltage Co Ltd | 半導体ウェーハ保持用アダプタに装填されたウェーハの異常検出方法及び検出装置 |
| JP2007251143A (ja) * | 2006-02-15 | 2007-09-27 | Olympus Corp | 外観検査装置 |
| JP2011145171A (ja) * | 2010-01-14 | 2011-07-28 | Nikon Corp | 形状検出装置 |
| JP2013110270A (ja) * | 2011-11-21 | 2013-06-06 | Tokyo Electron Ltd | 基板処理装置及び基板処理方法並びに基板処理プログラムを記憶したコンピュータ読み取り可能な記憶媒体 |
Cited By (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10402997B2 (en) | 2015-10-27 | 2019-09-03 | SCREEN Holdings Co., Ltd. | Displacement detecting apparatus, displacement detecting method and substrate processing apparatus |
| JP2017183498A (ja) * | 2016-03-30 | 2017-10-05 | 東京エレクトロン株式会社 | 基板処理装置、及び基板処理装置の撮像方法 |
| JP7090005B2 (ja) | 2018-10-05 | 2022-06-23 | 東京エレクトロン株式会社 | 基板処理装置及び検査方法 |
| CN111009477A (zh) * | 2018-10-05 | 2020-04-14 | 株式会社斯库林集团 | 基板处理方法及基板处理装置 |
| JP2020061417A (ja) * | 2018-10-05 | 2020-04-16 | 東京エレクトロン株式会社 | 基板処理装置及び検査方法 |
| JP2021141233A (ja) * | 2020-03-06 | 2021-09-16 | 株式会社Screenホールディングス | 基板処理装置、および、基板処理方法 |
| JP7486984B2 (ja) | 2020-03-06 | 2024-05-20 | 株式会社Screenホールディングス | 基板処理装置、および、基板処理方法 |
| JP7426874B2 (ja) | 2020-03-27 | 2024-02-02 | 株式会社Screenホールディングス | 基板処理装置、および、基板処理方法 |
| JP2021156741A (ja) * | 2020-03-27 | 2021-10-07 | 株式会社Screenホールディングス | 基板処理装置、および、基板処理方法 |
| WO2021192738A1 (ja) * | 2020-03-27 | 2021-09-30 | 株式会社Screenホールディングス | 基板処理装置、および、基板処理方法 |
| WO2023127240A1 (ja) * | 2021-12-27 | 2023-07-06 | 株式会社Screenホールディングス | 動作監視方法および製造装置 |
| JP2023096643A (ja) * | 2021-12-27 | 2023-07-07 | 株式会社Screenホールディングス | 動作監視方法および製造装置 |
| KR20240107158A (ko) * | 2021-12-27 | 2024-07-08 | 가부시키가이샤 스크린 홀딩스 | 동작 감시 방법 및 제조 장치 |
| TWI855419B (zh) * | 2021-12-27 | 2024-09-11 | 日商斯庫林集團股份有限公司 | 動作監視方法及製造裝置 |
| JP7734070B2 (ja) | 2021-12-27 | 2025-09-04 | 株式会社Screenホールディングス | 動作監視方法および製造装置 |
| KR102925369B1 (ko) * | 2021-12-27 | 2026-02-09 | 가부시키가이샤 스크린 홀딩스 | 동작 감시 방법 및 제조 장치 |
| JPWO2023243438A1 (ja) * | 2022-06-16 | 2023-12-21 | ||
| WO2023243438A1 (ja) * | 2022-06-16 | 2023-12-21 | 東京エレクトロン株式会社 | 基板処理装置および基板処理方法 |
| JP7778238B2 (ja) | 2022-06-16 | 2025-12-01 | 東京エレクトロン株式会社 | 基板処理装置および基板処理方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| TWI550748B (zh) | 位移檢測裝置、基板處理裝置、位移檢測方法及基板處理方法 | |
| JP2015096830A (ja) | 基板処理装置および基板処理方法 | |
| JP6352133B2 (ja) | 位置検出装置、基板処理装置、位置検出方法および基板処理方法 | |
| US11908752B2 (en) | Substrate processing apparatus and substrate processing method | |
| JP6785092B2 (ja) | 変位検出装置、変位検出方法および基板処理装置 | |
| JP6541491B2 (ja) | 流下判定方法、流下判定装置および吐出装置 | |
| JP6553487B2 (ja) | 吐出判定方法および吐出装置 | |
| JP2016122681A (ja) | 基板処理装置および基板処理方法 | |
| JP6362466B2 (ja) | 基板保持検査方法および基板処理装置 | |
| WO2018061338A1 (ja) | 検出方法および検出装置 | |
| JP2015173148A (ja) | 基板処理装置および基板処理方法 | |
| US10402997B2 (en) | Displacement detecting apparatus, displacement detecting method and substrate processing apparatus | |
| KR20210031513A (ko) | 가동부 위치 검출 방법, 기판 처리 방법, 기판 처리 장치 및 기판 처리 시스템 | |
| WO2020071212A1 (ja) | 基板処理方法および基板処理装置 | |
| JP6511572B2 (ja) | 基板保持検査方法および基板処理装置 | |
| JP2023045854A (ja) | 基板処理装置および基板処理方法 | |
| JP2019168411A (ja) | 位置検出装置、基板処理装置、位置検出方法および基板処理方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160608 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170316 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170328 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170526 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20170725 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20171107 |