JP2015128268A - 振動素子、振動子、発振器、電子機器、物理量センサー、移動体および振動素子の周波数調整方法 - Google Patents
振動素子、振動子、発振器、電子機器、物理量センサー、移動体および振動素子の周波数調整方法 Download PDFInfo
- Publication number
- JP2015128268A JP2015128268A JP2013273626A JP2013273626A JP2015128268A JP 2015128268 A JP2015128268 A JP 2015128268A JP 2013273626 A JP2013273626 A JP 2013273626A JP 2013273626 A JP2013273626 A JP 2013273626A JP 2015128268 A JP2015128268 A JP 2015128268A
- Authority
- JP
- Japan
- Prior art keywords
- weight
- vibration element
- weight portion
- vibrating arm
- main surface
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images




















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C19/00—Gyroscopes; Turn-sensitive devices using vibrating masses; Turn-sensitive devices without moving masses; Measuring angular rate using gyroscopic effects
- G01C19/56—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces
- G01C19/5607—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces using vibrating tuning forks
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03B—GENERATION OF OSCILLATIONS, DIRECTLY OR BY FREQUENCY-CHANGING, BY CIRCUITS EMPLOYING ACTIVE ELEMENTS WHICH OPERATE IN A NON-SWITCHING MANNER; GENERATION OF NOISE BY SUCH CIRCUITS
- H03B5/00—Generation of oscillations using amplifier with regenerative feedback from output to input
- H03B5/30—Generation of oscillations using amplifier with regenerative feedback from output to input with frequency-determining element being electromechanical resonator
- H03B5/32—Generation of oscillations using amplifier with regenerative feedback from output to input with frequency-determining element being electromechanical resonator being a piezoelectric resonator
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03H—IMPEDANCE NETWORKS, e.g. RESONANT CIRCUITS; RESONATORS
- H03H9/00—Networks comprising electromechanical or electro-acoustic elements; Electromechanical resonators
- H03H9/02—Details
- H03H9/02007—Details of bulk acoustic wave devices
- H03H9/02086—Means for compensation or elimination of undesirable effects
- H03H9/02102—Means for compensation or elimination of undesirable effects of temperature influence
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03H—IMPEDANCE NETWORKS, e.g. RESONANT CIRCUITS; RESONATORS
- H03H9/00—Networks comprising electromechanical or electro-acoustic elements; Electromechanical resonators
- H03H9/02—Details
- H03H9/02535—Details of surface acoustic wave devices
- H03H9/02543—Characteristics of substrate, e.g. cutting angles
- H03H9/02551—Characteristics of substrate, e.g. cutting angles of quartz substrates
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03H—IMPEDANCE NETWORKS, e.g. RESONANT CIRCUITS; RESONATORS
- H03H9/00—Networks comprising electromechanical or electro-acoustic elements; Electromechanical resonators
- H03H9/02—Details
- H03H9/05—Holders or supports
- H03H9/0504—Holders or supports for bulk acoustic wave devices
- H03H9/0509—Holders or supports for bulk acoustic wave devices consisting of adhesive elements
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03H—IMPEDANCE NETWORKS, e.g. RESONANT CIRCUITS; RESONATORS
- H03H9/00—Networks comprising electromechanical or electro-acoustic elements; Electromechanical resonators
- H03H9/02—Details
- H03H9/05—Holders or supports
- H03H9/0538—Constructional combinations of supports or holders with electromechanical or other electronic elements
- H03H9/0547—Constructional combinations of supports or holders with electromechanical or other electronic elements consisting of a vertical arrangement
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03H—IMPEDANCE NETWORKS, e.g. RESONANT CIRCUITS; RESONATORS
- H03H9/00—Networks comprising electromechanical or electro-acoustic elements; Electromechanical resonators
- H03H9/02—Details
- H03H9/05—Holders or supports
- H03H9/10—Mounting in enclosures
- H03H9/1007—Mounting in enclosures for bulk acoustic wave [BAW] devices
- H03H9/1014—Mounting in enclosures for bulk acoustic wave [BAW] devices the enclosure being defined by a frame built on a substrate and a cap, the frame having no mechanical contact with the BAW device
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03H—IMPEDANCE NETWORKS, e.g. RESONANT CIRCUITS; RESONATORS
- H03H9/00—Networks comprising electromechanical or electro-acoustic elements; Electromechanical resonators
- H03H9/15—Constructional features of resonators consisting of piezoelectric or electrostrictive material
- H03H9/21—Crystal tuning forks
- H03H9/215—Crystal tuning forks consisting of quartz
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03H—IMPEDANCE NETWORKS, e.g. RESONANT CIRCUITS; RESONATORS
- H03H3/00—Apparatus or processes specially adapted for the manufacture of impedance networks, resonating circuits, resonators
- H03H3/007—Apparatus or processes specially adapted for the manufacture of impedance networks, resonating circuits, resonators for the manufacture of electromechanical resonators or networks
- H03H3/02—Apparatus or processes specially adapted for the manufacture of impedance networks, resonating circuits, resonators for the manufacture of electromechanical resonators or networks for the manufacture of piezoelectric or electrostrictive resonators or networks
- H03H2003/026—Apparatus or processes specially adapted for the manufacture of impedance networks, resonating circuits, resonators for the manufacture of electromechanical resonators or networks for the manufacture of piezoelectric or electrostrictive resonators or networks the resonators or networks being of the tuning fork type
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03H—IMPEDANCE NETWORKS, e.g. RESONANT CIRCUITS; RESONATORS
- H03H3/00—Apparatus or processes specially adapted for the manufacture of impedance networks, resonating circuits, resonators
- H03H3/007—Apparatus or processes specially adapted for the manufacture of impedance networks, resonating circuits, resonators for the manufacture of electromechanical resonators or networks
- H03H3/02—Apparatus or processes specially adapted for the manufacture of impedance networks, resonating circuits, resonators for the manufacture of electromechanical resonators or networks for the manufacture of piezoelectric or electrostrictive resonators or networks
- H03H3/04—Apparatus or processes specially adapted for the manufacture of impedance networks, resonating circuits, resonators for the manufacture of electromechanical resonators or networks for the manufacture of piezoelectric or electrostrictive resonators or networks for obtaining desired frequency or temperature coefficient
- H03H2003/0414—Resonance frequency
- H03H2003/0492—Resonance frequency during the manufacture of a tuning-fork
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03H—IMPEDANCE NETWORKS, e.g. RESONANT CIRCUITS; RESONATORS
- H03H9/00—Networks comprising electromechanical or electro-acoustic elements; Electromechanical resonators
- H03H9/02—Details
- H03H2009/02165—Tuning
Landscapes
- Physics & Mathematics (AREA)
- Acoustics & Sound (AREA)
- Chemical & Material Sciences (AREA)
- Crystallography & Structural Chemistry (AREA)
- Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Piezo-Electric Or Mechanical Vibrators, Or Delay Or Filter Circuits (AREA)
Abstract
【解決手段】振動素子は、基部と、基部から延出され、錘部5が設けられている振動腕32とを含み、錘部5は、振動腕32の先端部の一方の主面に配置されている第1錘部51と、第1錘部51よりも基端側に配置され、第1錘部51よりも厚さが薄い第2錘部52とを含む。振動腕32は、エネルギー線が透過することができ、振動腕の反対側の主面であって第2錘部52と重なる位置には、エネルギー線の振動腕32内への入射を許容するレーザー入射領域SLLが配置されている。
【選択図】図5
Description
特許文献1に記載の周波数調整方法は、振動素子をパッケージ内に収容した状態で行う方法である。より具体的には、振動素子が備える振動腕の先端部の両面には錘部(金属膜)が設けられている。また、パッケージの蓋は、レーザー光を透過することができるようになっている。そして、蓋を介してレーザー光を錘部に照射し、振動腕の両面に設けられている錘部の少なくとも一部を除去して振動腕の質量を減少させることで、振動素子の周波数の調整を行う方法である。しかしながら、このような周波数調整方法では、次のような問題がある。
[適用例1]
本適用例の振動素子は、基部と、
平面視で前記基部から延出され、錘部が設けられている振動腕と、を含み、
前記錘部は、
平面視で、前記振動腕の前記基部とは反対側の先端部の一方の主面に配置されている第1錘部と、
前記第1錘部よりも前記基部側に配置され、前記第1錘部よりも厚さが薄い第2錘部と、
を含み、
前記振動腕は、エネルギー線が透過することができ、
前記振動腕の前記一方の主面と表裏の関係にある他方の主面であって、平面視で前記第2錘部と重なる位置に、前記エネルギー線の前記振動腕内への入射を許容する領域が配置されていることを特徴とする。
これにより、他方の主面側からエネルギー線を照射することで、蒸発した錘部が振動腕に再付着することをより効果的に抑制することができる。そのため、さらに、効率よくかつ精度よく周波数調整を行うことのできる振動素子が得られる。
本適用例の振動素子では、前記領域は、前記他方の主面であって、平面視で前記第1錘部と重なる位置にも配置されていることが好ましい。
これにより、他方の主面側からエネルギー線を照射することで、蒸発した錘部が振動腕に再付着することをより効果的に抑制することができる。そのため、さらに、効率よくから精度よく周波数調整を行うことのできる振動素子が得られる。
本適用例の振動素子では、前記第1錘部の前記延在方向に沿った長さをL1、
前記第2錘部の前記延在方向に沿った長さをL2としたとき、

第1錘部は、周波数の粗調用に用いることができ、第2錘部は、周波数の微調に用いることができる。第1錘部の長さL1と第2錘部の長さL2の関係を本適用例の関係とすることで、第1、第2錘部をそれぞれ十分に広く確保することができ、周波数の粗調および微調をそれぞれ簡単に行うことができる。
本適用例の振動素子では、
これにより、第1、第2錘部をそれぞれ十分に広く確保することができ、周波数の粗調および微調をそれぞれ簡単に行うことができる。
本適用例の振動素子では、前記第1錘部は、前記一方の主面側から少なくとも第1錘層と、前記第1錘層上に第2錘層が順に積層してなり、
前記第2錘部は、前記第1錘層で構成されていることが好ましい。
これにより、第1、第2錘部を簡単に形成することができる。
本適用例の振動素子では、前記第1錘層は、スパッタ法により形成され、
前記第2錘層は、蒸着法により形成されていることが好ましい。
これにより、錘部を簡単に形成することができる。特に、第2錘層を蒸着法で形成することで、エネルギー線照射によって錘部を除去する際に発生するアウトガス(デガス)を低減することができる。そのため、振動素子をパッケージに収容した状態で周波数調整を行う場合には、パッケージ内の真空度の低下等を低減することができる。
本適用例の振動素子では、前記錘部は、
前記他方の主面に平面視で前記第1錘部と重なるように配置されている第3錘部を含むことが好ましい。
これにより、周波数の粗調をより効果的に行うことができる。
[適用例8]
本適用例の振動素子では、前記第3錘部の厚さは、前記第2錘部の厚さよりも厚いことが好ましい。
これにより、周波数の粗調をより効果的に行うことができる。
本適用例の振動素子では、前記第1錘部の前記延在方向に沿った長さをL1、
前記第3錘部の前記延在方向に沿った長さをL3としたとき、
L3<L1
なる関係を満足することが好ましい。
これにより、第3錘部が前記領域を覆ってしまうのを防止することができる。
[適用例10]
本適用例の振動素子では、前記領域では、前記他方の主面の地肌が露出していることが好ましい。
これにより、より効率的に、エネルギー線を振動腕内に入射させることができる。
本適用例の振動素子では、前記振動腕は、
広幅部と、
前記基部と前記広幅部との間に配置され、前記広幅部よりも幅が狭い腕部と、
を含み、
前記広幅部に前記錘部が配置されていることが好ましい。
これにより、振動素子の小型化を図ることができる。
本適用例の振動子は、上記適用例の振動素子と、
前記振動素子が収容されているパッケージと、
を備えていることを特徴とする。
これにより、信頼性の高い振動子が得られる。
本適用例の発振器は、上記適用例の振動素子と、
回路と、
を備えていることを特徴とする。
これにより、信頼性の高い発振器が得られる。
本適用例の電子機器は、上記適用例の振動素子を備えていることを特徴とする。
これにより、信頼性の高い電子機器が得られる。
[適用例15]
本適用例の物理量センサーは、上記適用例の振動素子を備えていることを特徴とする。
これにより、信頼性の高い物理量センサーが得られる。
[適用例16]
本適用例の移動体は、上記適用例の振動素子を備えていることを特徴とする。
これにより、信頼性の高い移動体が得られる。
本適用例の振動素子の周波数調整方法は、振動素子をパッケージに収容する収容工程と、
前記振動素子の共振周波数を調整する第1調整工程と、
前記振動素子の共振周波数を調整する第2調整工程と、
を有し、
前記振動素子は、
基部と、
平面視で前記基部から延出され、錘部が設けられている振動腕と、
を含み、
前記錘部は、
平面視で前記振動腕の前記基部とは反対側の先端部の一方の主面に配置されている第1錘部と、
前記第1錘部よりも前記基部側に位置し、前記第1錘部よりも厚さが薄い第2錘部と、
を含み、
前記振動腕は、エネルギー線が透過することができ、
前記振動腕の前記一方の主面と表裏の関係にある他方の主面であって、平面視で前記第2錘部と重なる位置に、前記エネルギー線の前記振動腕内への入射を許容する領域が配置され、
前記パッケージは、
前記エネルギー線が透過することのできる透過部を有し、
前記収容工程では、
前記振動素子を前記他方の主面を前記透過部側に位置させ、かつ、前記透過部と前記領域とを対向させて前記パッケージに収容し、
前記第1調整工程では、
前記エネルギー線を前記透過部から前記パッケージ内へ導き、さらに、前記他方の主面から前記振動腕内を透過させて前記第1錘部に照射することで前記第1錘部の少なくとも一部を除去し、
前記第2調整工程では、
前記エネルギー線を前記透過部から前記パッケージ内へ導き、さらに、前記領域から前記振動腕内を透過させて前記第2錘部に照射することで前記第2錘部の少なくとも一部を除去することを特徴とする。
このような方法によれば、錘部が透過部と反対側に位置しているため、エネルギー線によって蒸発した錘部が透過部に付着し難くなる。そのため、前述の背景技術で挙げた問題が生じ難く、効率よくかつ精度よく振動素子の周波数調整を行うことができる。
本適用例の振動素子の周波数調整方法では、前記領域は、
前記振動腕の先端部の他方の主面であって、平面視で前記第1錘部と重なる位置にも配置されており、
前記第1調整工程では、
前記エネルギー線を前記透過部から前記パッケージ内へ導き、さらに、前記領域から前記振動腕内を透過させて前記第1錘部に照射することで前記第1錘部の少なくとも一部を除去することが好ましい。
これにより、さらに、効率よくかつ精度よく振動素子の周波数調整を行うことができる。
1.振動子(振動素子)および振動素子の周波数調整方法
<第1実施形態>
図1は、本発明の第1実施形態にかかる振動子の平面図である。図2は、図1中のA−A線断面図である。図3は、図1中のB−B線断面図である。図4は、ウエットエッチングにより形成された振動腕を示す断面図である。図5は、錘部を示す平面図および断面図である。図6は、図5に示す錘部の具体的な構成を例示する断面図である。図7は、屈曲振動時の熱伝導について説明する振動腕の断面図である。図8は、Q値とf/fmの関係を示すグラフである。図9ないし図12は、それぞれ、周波数調整方法を説明する断面図である。なお、以下では、説明の便宜上、図2中の上側を「上」とし、下側を「下」とする。また、図1中の上側を「先端」とし、下側を「基端」とする。
図1に示すように、振動子1は、振動素子2と、振動素子2を収納するパッケージ9とを有している。
−パッケージ−
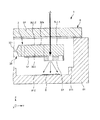
図1および図2に示すように、パッケージ9は、上面に開放する凹部911を有する箱状のベース91と、凹部911の開口を塞いでベース91に接合されている板状のリッド92とを有している。パッケージ9は、凹部911がリッド92で塞がれることで形成された収容空間Sを有し、この収容空間Sに振動素子2を気密的に収容している。収容空間S内の雰囲気としては、特に限定されないが、減圧状態(真空状態)となっていることが好ましい。これにより、振動素子2の駆動に対する空気抵抗が低減されるため、優れた振動特性を発揮することができる。なお、収容空間S内の真空度としては、特に限定されないが、100Pa以下程度であることが好ましく、10Pa以下程度であることがより好ましい。また、収容空間S内には、窒素、ヘリウム、アルゴン等の不活性ガスが封入されていてもよい。ベース91とリッド92は、例えば、低融点ガラス、各種接着剤、メタライズ層等を介して接合することができる。
また、本実施形態では、リッド92がレーザー光LL(エネルギー線)を透過する透過部を有しているが、ベース91に硼珪酸ガラス、石英ガラス、無アルアリガラス等の各種ガラス材料や、水晶等の透明な単結晶を用いた場合には、ベース91がレーザー光LL(エネルギー線)を透過する透過部を有することもできる。
図1ないし図3に示すように、振動素子2は、水晶振動片(振動片)3と、水晶振動片3上に設けられた第1、第2駆動用電極84、85と、水晶振動片3上に設けられた錘部5と、を有している。なお、図1および図2では、説明の便宜上、第1、第2駆動用電極84、85および錘部5の図示を省略している。
そして、このような振動素子2は、接続部34が導電性接着材11、12によりベース91に取り付けられている。このように、2つの導電性接着材11、12を用いることで、振動素子2を安定した状態でベース91に取り付けることができる。
また、振動腕32、33は、それぞれ、基部31から延びている腕部321、331と、腕部321、331の先端側に位置し、腕部321、331よりも幅が広い錘部としてのハンマーヘッド(広幅部)322、332と、を有している。このように、振動腕32、33の先端部にハンマーヘッド322、332を設けることで、振動腕32、33を短くすることができ、振動素子2の小型化を図ることができる。また、振動腕32、33を短くすることができる分、同じ周波数で振動腕32、33を振動させたときの振動腕32、33の振動速度を従来よりも低くすることができるため、振動腕32、33が振動する際の空気抵抗を低減することができ、その分、Q値が高まり、振動特性を向上させることができる。また、所定の長さ(Y軸方向長さ)、所定の振動周波数を固定して考えた場合には、ハンマーヘッド322、332を設けることによって低下する振動周波数を元に戻すように、腕部321、331の幅(X軸方向長さ)を広くすることができるから、屈曲振動によって発生する熱の移動経路を長くすることができるので、後述する断熱的領域においては熱弾性損失を低減することができ、その分、Q値が高まり、振動特性を向上させることができる。
図3に示すように、腕部321は、XY平面で構成され、互いに表裏の関係にある一対の主面32a、32bと、YZ平面で構成され、一対の主面32a、32bを接続する1対の側面32c、32dと、を有している。また、腕部321には、主面32aに開口する有底の溝323と、主面32bに開口する有底の溝324とを有している。このように、振動腕32に溝323、324を形成することによって、熱弾性損失の低減を図ることができ、優れた振動特性を発揮することができる。溝323、324の長さは、特に限定されず、先端がハンマーヘッド322まで延びていてもよいし、基端が基部31まで延びていてもよい。このような構成とすることで、腕部321とハンマーヘッド322の境界部および腕部321と基部31の境界部への応力集中が緩和され、衝撃が加わった際に発生する折れや欠けの虞が減少する。なお、溝は、主面32a、32bのいずれか一方にだけ設けられていてもよいし、省略してもよい。
図3に示すように、このような水晶振動片3が有する振動腕32には、一対の第1駆動用電極84と一対の第2駆動用電極85とが形成されている。第1駆動用電極84の一方は、溝323の内面に形成されており、他方は、溝324の内面に形成されている。また、第2駆動用電極85の一方は、側面32cに形成されており、他方は、側面32dに形成されている。同様に、振動腕33にも、一対の第1駆動用電極84と一対の第2駆動用電極85とが形成されている。第1駆動用電極84の一方は、側面33cに形成されており、他方は、側面33dに形成されている。また、第2駆動用電極85の一方は、溝333の内面に形成されており、他方は、溝334の内面に形成されている。
また、第1、第2駆動用電極84、85の具体的な構成としては、例えば、700Å以下のCr層上に700Å以下のAu層を形成した構成とすることができる。特に、CrやAuは、熱弾性損失が大きいので、Cr層、Au層は、好ましくは200Å以下とされる。また、絶縁破壊耐性を高くする場合には、Cr層、Au層は、好ましくは1000Å以上とされる。さらに、Niは、水晶の熱膨張係数に近いので、Cr層に替えてNi層を下地にすることで、電極に起因する熱応力を減少させ、長期信頼性(エージング特性)の良い振動素子を得ることができる。
振動腕32、33のハンマーヘッド322、332には、それぞれ、錘部5が設けられている。錘部5は、振動素子2の共振周波数の調整を行うのに用いられる。このような錘部5の構成は、振動腕32、33で同様であるため、以下では、振動腕32に設けられている錘部5について代表して説明し、振動腕33に設けられている錘部5については、その説明を省略する。
振動腕32は、前述したように、第1、第2駆動用電極84、85間に交番電圧を印加することにより面内方向に屈曲振動する。図7に示すように、この屈曲振動の際、腕部321の側面32cが収縮すると側面32dが伸張し、反対に、側面32cが伸張すると側面32dが収縮する。振動腕32がGough−Joule効果を発生しない(エネルギー弾性がエントロピー弾性に対して支配的な)場合、側面32c、32dのうち、収縮する面側の温度は上昇し、伸張する面側の温度は下降する。そのため、側面32cと側面32dとの間、つまり腕部321の内部に温度差が発生する。この温度差から生じる熱伝導によって振動エネルギーの損失が発生し、これにより振動素子2のQ値が低下する。このようなQ値の低下に伴うエネルギーの損失を熱弾性損失とも言う。
次に、図9〜図12に基づいて、上述した振動素子2の共振周波数を調整する方法について説明する。なお、以下では、説明の便宜上、振動腕32に設けられた錘部5を除去する場合を代表して説明するが、振動腕33に設けられた錘部5も同様にして除去するものである。
まず、振動素子2を駆動させた状態で、図9に示すように、第1錘部51の先端側にレーザー光LLを照射し、第1錘部51の一部を除去する。これにより、振動素子2の共振周波数を目的値に対して大まかに合わせ込む。すなわち粗調する。第1錘部51の先端側は、レーザー光LLの照射時間(錘部の除去量)に対する周波数変化の割合が大きいため、より効率的に共振周波数の粗調を行うことができる。なお、図9(a)では、ハンマーヘッド322の主面32b側(第1錘部51の表面側)からレーザー光LLを照射しているが、反対に、ハンマーヘッド322の主面32a側(第1錘部51の裏面側)からレーザー光LLを照射してもよい。すなわち、レーザー光LLを、第1レーザー入射領域SLL1からハンマーヘッド322内を透過させて第1錘部51へ照射してもよい。また、本工程は、振動素子2がウエハ上に保持されている状態で行うことができる。すなわち、ウエハから振動素子2を折り取る前に行うことができる。また、本工程は、大気に曝された状態で行ってもよいし、減圧された状態で行ってもよい。特に前者の場合には、空気抵抗による共振周波数のずれが発生してしまうが、より簡単に共振周波数を調整することができる。
次に、図10に示すように、粗調済みの振動素子2をパッケージ9に収容し(すなわち、導電性接着材11、12を介してベース91に固定し)、パッケージ9内を真空状態とする。振動素子2を収容した状態では、振動素子2の第1、第2錘部51、52が配置されている側の主面32bがベース91側に位置し、レーザー入射領域SLLが設けられている側の主面32aがリッド92側に位置している。さらに、リッド92とレーザー入射領域SLLとが対向している。このような配置とすることで、後述するように、リッド92およびハンマーヘッド322を介して、レーザー光LLを第1、第2錘部51、52に照射することができる。
次に、振動素子2を駆動させた状態で、図11に示すように、レーザー光LLをリッド92側から第1錘部51に向けて照射し、第1錘部51の少なくとも一部を除去する。具体的には、レーザー光LLを、リッド92を介してパッケージ9内に導き、さらに、第1レーザー入射領域SLL1からハンマーヘッド322内を透過させて第1錘部51にその裏側から照射することで、第1錘部51の一部を除去する。この時、レーザー光LLを照射する領域は、前述した粗調工程でレーザー光LLを照射した領域よりも基端側に位置していることが好ましい。これにより、粗調工程よりも、レーザー光LLの照射時間(錘部の除去量)に対する周波数変化の割合が小さくなる。このような第1調整工程によって、振動素子2の共振周波数を目的値に対してさらに合わせ込む。なお、本工程は、前記粗調工程よりも微小ではあるが、共振周波数を比較的粗く調整する粗調工程であるとも言える。
次に、振動素子2を駆動させた状態で、図12に示すように、レーザー光LLをリッド92側から第2錘部52に向けて照射し、第2錘部52の少なくとも一部を除去する。具体的には、レーザー光LLを、リッド92を介してパッケージ9内に導き、さらに、第2レーザー入射領域SLL2からハンマーヘッド322内を透過させて第2錘部52にその裏側から照射することで、第2錘部52の一部を除去する。第2錘部52は、第1錘部51よりも薄く、かつ、第1錘部51よりも基端側に位置しているため、レーザー光LLの照射時間(錘部の除去量)に対する周波数変化の割合が小さい。このことから、本工程は、共振周波数を微小に調整する微調工程であるとも言える。このような第2調整工程によって、振動素子2の共振周波数を目的値に対してさらに合わせ込み、好ましくは一致させる。
なお、本実施形態では、エネルギー線としてレーザー光LLを用いているが、エネルギー線としては、錘部5を除去することができれば特に限定されず、例えば、電子ビーム等を用いてもよい。
図13は、本発明の第2実施形態にかかる振動子が備える振動素子の断面図である。図14および図15は、それぞれ、周波数調整方法を説明する断面図である。
以下、第2実施形態の振動子について、前述した実施形態の振動子との相違点を中心に説明し、同様の事項については、その説明を省略する。
本実施形態の振動子は、振動素子が有する錘部の構成が異なること以外は、前述した第1実施形態の振動子と同様である。
図13に示すように、本実施形態の振動素子2では、錘部5が、ハンマーヘッド322の主面32aに配置された第3錘部53を有している。この第3錘部53は、前述した粗調工程での周波数調整に利用されるものである。
第3錘部53は、平面視(Z軸方向から見た平面視)で第1錘部51の一部と重なるように配置されている。より具体的には、第3錘部53の振動腕32の延在方向(Y軸方向)に沿った長さをL3としたとき、L3<L1なる関係を満足しており、平面視で、第1錘部51の先端部と重なるように配置されている。そのため、ハンマーヘッド322の主面32aであって第1錘部51の基端部と重なる位置に、第1レーザー入射領域SLL1が配置されている。また、第3錘部53の厚さt3は、第2錘部52の厚さ(第1錘層5Aの厚さt1)よりも厚く、本実施形態では、第1錘部51とほぼ等しい厚さとなっている。これにより、後述するように、粗調工程での周波数調整をより効率的に行うことができる。
このような第3錘部53の構成としては、特に限定されず、例えば、第1錘部51と同様の構成とすることができる。すなわち、第3錘部53は、第1錘層5Aと第2錘層5Bとの積層体で構成することができる。
次に、図14、図15に基づいて、上述した振動素子2の共振周波数を調整する方法について説明する。なお、以下では、説明の便宜上、振動腕32に設けられた錘部5を除去する場合を代表して説明するが、振動腕33に設けられた錘部5も同様にして除去するものである。
まず、振動素子2を駆動させた状態で、図14に示すように、第1錘部51と第3錘部53とが重なっている領域にレーザー光LLを照射し、第1、第3錘部51、53の一部を除去する。これにより、振動素子2の共振周波数を目的値に対して大まかに合わせ込む。この領域は、振動腕32の先端部に位置し、さらに、第1、第3錘部51、53が重なっている領域であるため、レーザー光LLの照射時間(錘部の除去量)に対する周波数変化の割合が大きい。そのため、より効率的に共振周波数の粗調を行うことができる。特に、前述したように、第3錘部53の厚さが第2錘部52の厚さよりも厚いため、上記効果がより顕著となる。
−収容工程−
前述した第1実施形態と同様であるため、説明を省略する。
次に、振動素子2を駆動させた状態で、図15に示すように、レーザー光LLをリッド92側から第1錘部51に向けて照射し、第1錘部51の少なくとも一部を除去する。具体的には、レーザー光LLを、リッド92を介してパッケージ9内に導き、さらに、第1レーザー入射領域SLL1からハンマーヘッド322内を透過させて第1錘部51にその裏側から照射することで、第1錘部51の一部を除去する。これにより、振動素子2の共振周波数を目的値に対してさらに合わせ込む。
−第2調整工程−
前述した第1実施形態と同様であるため、説明を省略する。
このような第2実施形態によっても、前述した第1実施形態と同様の効果を発揮することができる。
図16は、本発明の第3実施形態にかかる振動子が備える振動素子の断面図である。
以下、第3実施形態の振動子について、前述した実施形態の振動子との相違点を中心に説明し、同様の事項については、その説明を省略する。
本実施形態の振動子は、振動素子が有する錘部(第3錘部)の構成が異なること以外は、前述した第2実施形態の振動子と同様である。
図16に示すように、本実施形態の振動素子2では、第3錘部53が、平面視(Z軸方向から見た平面視)で第1錘部51の全域と重なるように配置されている。より具体的には、第3錘部53の長さL3が、L3=L1なる関係を満足しており、平面視で、第1錘部51と重なるように配置されている。そのため、ハンマーヘッド322の主面32aであって第1錘部51と重なる位置にはレーザー入射領域SLLが配置されていない。
このような第3実施形態によっても、前述した第1実施形態と同様の効果を発揮することができる。
図17は、本発明の第4実施形態にかかる振動子が備える振動素子の平面図である。
以下、第4実施形態の振動子について、前述した実施形態の振動子との相違点を中心に説明し、同様の事項については、その説明を省略する。
本実施形態の振動子は、振動素子が有するハンマーヘッドの形状が異なること以外は、前述した第1実施形態の振動子と同様である。
図17に示すように、本実施形態の振動素子2では、ハンマーヘッド322が、先端側に位置する先端部3221と、先端部3221の基端側に位置し、先端部3221よりも幅の狭い基端部3222と、を有している。そして、先端部3221の主面32b上に第1錘部51が配置されており、基端部3222の主面32b上に第2錘部52が配置されている。錘部5をリッド92側から見たときには、第1錘層5Aの裏面が視認されるだけで、第1錘部51と第2錘部52の境界を視認することができない。しかしながら、本実施形態のように、ハンマーヘッド322を二段形状とすることで、第1錘部51と第2錘部52の位置(これらの境界部)を視覚的に確認し易くなり、レーザー光LLの照射をより正確に行うことができる。
このような第4実施形態によっても、前述した第1実施形態と同様の効果を発揮することができる。
次に、本発明の振動素子を備えた発振器について説明する。
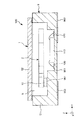
図18は、本発明の発振器の好適な実施形態を示す断面図である。なお、図18では、説明の便宜上、振動素子2の第1、第2駆動用電極および錘部の図示を省略している。
図18に示す発振器100は、振動子1と、振動素子2を駆動するためのICチップ110とを有している。以下、発振器100について、前述した振動子との相違点を中心に説明し、同様の事項については、その説明を省略する。
次に、本発明の振動素子を備えた物理量センサーについて説明する。
図19は、本発明の物理量センサーの好適な実施形態を示す断面図である。なお、図19では、説明の便宜上、振動素子2の第1、第2駆動用電極および錘部の図示を省略している。
図19に示すように、物理量センサー200では、ベース91の凹部911にICチップ210が固定されている。ICチップ210は、凹部911の底面に形成された複数の内部端子220と電気的に接続されている。複数の内部端子220には、接続端子951、961と接続されているものと、外部端子953、963と接続されているものがある。ICチップ210は、振動素子2の駆動を制御するための発振回路(回路)と、角速度を検出するための検出回路とを有している。
なお、物理量センサーとしては、角速度センサーに限定されず、加速度センサーや圧力センサーにも用いることができる。
次に、本発明の振動素子を備えた電子機器について説明する。
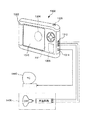
図20は、本発明の電子機器を適用したモバイル型(またはノート型)のパーソナルコンピューターの構成を示す斜視図である。この図において、パーソナルコンピューター1100は、キーボード1102を備えた本体部1104と、表示部1108を備えた表示ユニット1106とにより構成され、表示ユニット1106は、本体部1104に対しヒンジ構造部を介して回動可能に支持されている。このようなパーソナルコンピューター1100にはフィルター、共振器、基準クロック等として機能する振動子1(振動素子2)が内蔵されている。
次に、本発明の振動素子を備えた移動体について説明する。
図23は、本発明の移動体を適用した自動車を示す斜視図である。自動車1500には、振動子1(振動素子2)が搭載されている。振動子1は、例えば、キーレスエントリー、イモビライザー、カーナビゲーションシステム、カーエアコン、アンチロックブレーキシステム(ABS)、エアバック、タイヤ・プレッシャー・モニタリング・システム(TPMS:Tire Pressure Monitoring System)、エンジンコントロール、ハイブリッド自動車や電気自動車の電池モニター、車体姿勢制御システム、等の電子制御ユニット(ECU:electronic control unit)に広く適用できる。
また、前述した実施形態では、振動片の構成材料として水晶を用いているが、振動片の構成材料としては、これに限定されず、例えば、窒化アルミニウム(AlN)や、ニオブ酸リチウム(LiNbO3)、タンタル酸リチウム(LiTaO3)、チタン酸ジルコン酸鉛(PZT)、四ホウ酸リチウム(Li2B4O7)、ランガサイト(La3Ga5SiO14)などの酸化物基板や、ガラス基板上に窒化アルミニウムや五酸化タンタル(Ta2O5)などの圧電体材料を積層させて構成された積層圧電基板、あるいは圧電セラミックスなどを用いることができる。
Claims (18)
- 基部と、
平面視で前記基部から延出され、錘部が設けられている振動腕と、を含み、
前記錘部は、
平面視で、前記振動腕の前記基部とは反対側の先端部の一方の主面に配置されている第1錘部と、
前記第1錘部よりも前記基部側に配置され、前記第1錘部よりも厚さが薄い第2錘部と、
を含み、
前記振動腕は、エネルギー線が透過することができ、
前記振動腕の前記一方の主面と表裏の関係にある他方の主面であって、平面視で前記第2錘部と重なる位置に、前記エネルギー線の前記振動腕内への入射を許容する領域が配置されていることを特徴とする振動素子。 - 前記領域は、前記他方の主面であって、平面視で前記第1錘部と重なる位置にも配置されている請求項1に記載の振動素子。
- 前記第1錘部の前記延在方向に沿った長さをL1、
前記第2錘部の前記延在方向に沿った長さをL2としたとき、
-
- 前記第1錘部は、前記一方の主面側から少なくとも第1錘層と、前記第1錘層上に第2錘層が順に積層してなり、
前記第2錘部は、前記第1錘層で構成されている請求項1ないし4のいずれか1項に記載の振動素子。 - 前記第1錘層は、スパッタ法により形成され、
前記第2錘層は、蒸着法により形成されている請求項5に記載の振動素子。 - 前記錘部は、
前記他方の主面に平面視で前記第1錘部と重なるように配置されている第3錘部を含む請求項1ないし6のいずれか1項に記載の振動素子。 - 前記第3錘部の厚さは、前記第2錘部の厚さよりも厚い請求項6に記載の振動素子。
- 前記第1錘部の前記延在方向に沿った長さをL1、
前記第3錘部の前記延在方向に沿った長さをL3としたとき、
L3<L1
なる関係を満足する請求項7または8に記載の振動素子。 - 前記領域では、前記他方の主面の地肌が露出している請求項1ないし9のいずれか1項に記載の振動素子。
- 前記振動腕は、
広幅部と、
前記基部と前記広幅部との間に配置され、前記広幅部よりも幅が狭い腕部と、
を含み、
前記広幅部に前記錘部が配置されている請求項1ないし10のいずれか1項に記載の振動素子。 - 請求項1ないし11のいずれか1項に記載の振動素子と、
前記振動素子が収容されているパッケージと、
を備えていることを特徴とする振動子。 - 請求項1ないし11のいずれか1項に記載の振動素子と、
回路と、
を備えていることを特徴とする発振器。 - 請求項1ないし11のいずれか1項に記載の振動素子を備えていることを特徴とする電子機器。
- 請求項1ないし11のいずれか1項に記載の振動素子を備えていることを特徴とする物理量センサー。
- 請求項1ないし11のいずれか1項に記載の振動素子を備えていることを特徴とする移動体。
- 振動素子をパッケージに収容する収容工程と、
前記振動素子の共振周波数を調整する第1調整工程と、
前記振動素子の共振周波数を調整する第2調整工程と、
を有し、
前記振動素子は、
基部と、
平面視で前記基部から延出され、錘部が設けられている振動腕と、
を含み、
前記錘部は、
平面視で前記振動腕の前記基部とは反対側の先端部の一方の主面に配置されている第1錘部と、
前記第1錘部よりも前記基部側に位置し、前記第1錘部よりも厚さが薄い第2錘部と、
を含み、
前記振動腕は、エネルギー線が透過することができ、
前記振動腕の前記一方の主面と表裏の関係にある他方の主面であって、平面視で前記第2錘部と重なる位置に、前記エネルギー線の前記振動腕内への入射を許容する領域が配置され、
前記パッケージは、
前記エネルギー線が透過することのできる透過部を有し、
前記収容工程では、
前記振動素子を前記他方の主面を前記透過部側に位置させ、かつ、前記透過部と前記領域とを対向させて前記パッケージに収容し、
前記第1調整工程では、
前記エネルギー線を前記透過部から前記パッケージ内へ導き、さらに、前記他方の主面から前記振動腕内を透過させて前記第1錘部に照射することで前記第1錘部の少なくとも一部を除去し、
前記第2調整工程では、
前記エネルギー線を前記透過部から前記パッケージ内へ導き、さらに、前記領域から前記振動腕内を透過させて前記第2錘部に照射することで前記第2錘部の少なくとも一部を除去することを特徴とする振動素子の周波数調整方法。 - 前記領域は、
前記振動腕の先端部の他方の主面であって、平面視で前記第1錘部と重なる位置にも配置されており、
前記第1調整工程では、
前記エネルギー線を前記透過部から前記パッケージ内へ導き、さらに、前記領域から前記振動腕内を透過させて前記第1錘部に照射することで前記第1錘部の少なくとも一部を除去する請求項17に記載の振動素子の周波数調整方法。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013273626A JP2015128268A (ja) | 2013-12-27 | 2013-12-27 | 振動素子、振動子、発振器、電子機器、物理量センサー、移動体および振動素子の周波数調整方法 |
| CN201410806740.4A CN104753494A (zh) | 2013-12-27 | 2014-12-22 | 振动元件、振子、振荡器、电子设备、传感器及移动体 |
| US14/582,606 US9255802B2 (en) | 2013-12-27 | 2014-12-24 | Resonator element, resonator, oscillator, electronic apparatus, physical quantity sensor, mobile object, and frequency adjustment method of resonator element |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013273626A JP2015128268A (ja) | 2013-12-27 | 2013-12-27 | 振動素子、振動子、発振器、電子機器、物理量センサー、移動体および振動素子の周波数調整方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2015128268A true JP2015128268A (ja) | 2015-07-09 |
| JP2015128268A5 JP2015128268A5 (ja) | 2017-02-16 |
Family
ID=53483056
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013273626A Withdrawn JP2015128268A (ja) | 2013-12-27 | 2013-12-27 | 振動素子、振動子、発振器、電子機器、物理量センサー、移動体および振動素子の周波数調整方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US9255802B2 (ja) |
| JP (1) | JP2015128268A (ja) |
| CN (1) | CN104753494A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20150381143A1 (en) * | 2014-06-30 | 2015-12-31 | Seiko Epson Corporation | Resonator element, method for manufacturing resonator element, resonator, gyro sensor, electronic apparatus, and moving object |
| JPWO2020085188A1 (ja) * | 2018-10-24 | 2021-09-02 | 株式会社村田製作所 | 共振装置 |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| TWI634742B (zh) * | 2013-11-16 | 2018-09-01 | 精工愛普生股份有限公司 | 振動片、振動子、振盪器、電子機器及移動體 |
| US9887687B2 (en) | 2015-01-28 | 2018-02-06 | Analog Devices Global | Method of trimming a component and a component trimmed by such a method |
| JP2019118073A (ja) * | 2017-12-27 | 2019-07-18 | セイコーエプソン株式会社 | 振動デバイス、振動デバイスの製造方法、電子機器および移動体 |
| JP7079607B2 (ja) * | 2018-01-16 | 2022-06-02 | エスアイアイ・クリスタルテクノロジー株式会社 | 圧電振動片、圧電振動子、及び製造方法 |
| JP7139610B2 (ja) | 2018-01-23 | 2022-09-21 | セイコーエプソン株式会社 | 振動素子、振動素子の製造方法、物理量センサー、慣性計測装置、電子機器および移動体 |
| JP2019176413A (ja) * | 2018-03-29 | 2019-10-10 | セイコーエプソン株式会社 | 振動素子の周波数調整方法、振動素子の製造方法、振動素子、物理量センサー、慣性計測装置、電子機器および移動体 |
| JP2020101429A (ja) * | 2018-12-21 | 2020-07-02 | セイコーエプソン株式会社 | 振動素子、振動素子の製造方法、物理量センサー、慣性計測装置、電子機器および移動体 |
| JP7528565B2 (ja) * | 2020-06-30 | 2024-08-06 | セイコーエプソン株式会社 | 振動素子の製造方法、振動素子および振動デバイス |
| JP7528566B2 (ja) * | 2020-06-30 | 2024-08-06 | セイコーエプソン株式会社 | 振動素子の製造方法、振動素子および振動デバイス |
| JP7689421B2 (ja) * | 2020-11-30 | 2025-06-06 | エスアイアイ・クリスタルテクノロジー株式会社 | 圧電振動片の製造方法 |
| JP7587744B2 (ja) * | 2021-01-26 | 2024-11-21 | 株式会社村田製作所 | 共振装置及びその製造方法 |
| US12249956B2 (en) * | 2021-02-25 | 2025-03-11 | Daishinku Corporation | Oven-controlled crystal oscillator |
| JP7687073B2 (ja) * | 2021-06-16 | 2025-06-03 | セイコーエプソン株式会社 | 振動素子及び振動デバイス |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003060470A (ja) * | 2001-08-14 | 2003-02-28 | Seiko Epson Corp | 圧電デバイス、圧電デバイスの周波数調整方法、圧電デバイスを利用した携帯電話装置及び圧電デバイスを利用した電子機器 |
| JP2003332871A (ja) * | 2002-05-14 | 2003-11-21 | Seiko Instruments Inc | 圧電振動子及び圧電振動子の製造方法 |
| JP2011193436A (ja) * | 2010-02-18 | 2011-09-29 | Daishinku Corp | 音叉型水晶振動片、音叉型水晶振動子、および音叉型水晶振動片の製造方法 |
Family Cites Families (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS4936152B1 (ja) | 1969-11-20 | 1974-09-27 | ||
| JPS5123987B1 (ja) | 1971-06-02 | 1976-07-21 | ||
| JPS5291669A (en) * | 1976-01-29 | 1977-08-02 | Seiko Instr & Electronics Ltd | Piezoelectric vibrator |
| JP2756559B2 (ja) | 1987-11-11 | 1998-05-25 | セイコーインスツルメンツ株式会社 | 圧電振動子の製造方法 |
| JPH03243010A (ja) | 1990-02-21 | 1991-10-30 | Seiko Electronic Components Ltd | 小型水晶振動子 |
| JP4547788B2 (ja) | 2000-03-15 | 2010-09-22 | セイコーエプソン株式会社 | 圧電振動子のパッケージ構造 |
| JP3714228B2 (ja) | 2001-10-29 | 2005-11-09 | セイコーエプソン株式会社 | 圧電振動子及び圧電デバイスの製造方法 |
| JP3998948B2 (ja) * | 2001-10-31 | 2007-10-31 | セイコーインスツル株式会社 | 圧電振動子及びその製造方法 |
| US7083270B2 (en) * | 2002-06-20 | 2006-08-01 | Matsushita Electric Industrial Co., Ltd. | Piezoelectric element, ink jet head, angular velocity sensor, method for manufacturing the same, and ink jet recording apparatus |
| JP2006229877A (ja) | 2005-02-21 | 2006-08-31 | Seiko Epson Corp | 圧電デバイス |
| JP4687993B2 (ja) | 2006-03-13 | 2011-05-25 | 株式会社大真空 | 圧電振動片、圧電振動子、および圧電振動片の周波数調整方法 |
| JP4389924B2 (ja) * | 2006-11-07 | 2009-12-24 | エプソントヨコム株式会社 | 圧電デバイス |
| JP5111043B2 (ja) * | 2006-11-30 | 2012-12-26 | セイコーインスツル株式会社 | 圧電振動子及び圧電振動子の製造方法、並びに、圧電振動子を備える発振器、電子機器、及び電波時計 |
| JP4407845B2 (ja) * | 2007-06-19 | 2010-02-03 | エプソントヨコム株式会社 | 圧電振動子及びその製造方法並びに圧電振動子用の蓋 |
| US7859172B2 (en) * | 2007-06-19 | 2010-12-28 | Epson Toyocom Corporation | Piezoelectric resonator, manufacturing method thereof and lid for piezoelectric resonator |
| JP5216290B2 (ja) * | 2007-09-27 | 2013-06-19 | 日本電波工業株式会社 | 圧電デバイス及び圧電デバイスの製造方法 |
| JP5031526B2 (ja) | 2007-11-13 | 2012-09-19 | シチズンホールディングス株式会社 | 圧電振動子及びその製造方法 |
| US7948157B2 (en) * | 2007-12-21 | 2011-05-24 | Seiko Instruments, Inc. | Piezoelectric oscillator having a tuning fork piezoelectric vibrating piece |
| JP2010283526A (ja) | 2009-06-03 | 2010-12-16 | Nippon Dempa Kogyo Co Ltd | 表面実装用の水晶振動子 |
| JP5520618B2 (ja) | 2010-01-21 | 2014-06-11 | 京セラクリスタルデバイス株式会社 | 音叉型屈曲水晶振動素子 |
| JP5123987B2 (ja) | 2010-05-28 | 2013-01-23 | 日本電波工業株式会社 | 圧電デバイス、および圧電デバイスの周波数調整方法 |
| JP2012120075A (ja) | 2010-12-03 | 2012-06-21 | Seiko Epson Corp | 圧電振動子、及び圧電発振器 |
| JP5333668B2 (ja) * | 2011-02-07 | 2013-11-06 | 株式会社大真空 | 音叉型圧電振動片、および音叉型圧電振動子 |
| JP2012186679A (ja) | 2011-03-07 | 2012-09-27 | Seiko Epson Corp | 圧電振動素子、圧電振動子、圧電発振器、及び電子機器 |
| JP5912557B2 (ja) * | 2011-03-29 | 2016-04-27 | 日本電波工業株式会社 | 音叉型圧電振動片及び圧電デバイス |
| JP2013197856A (ja) | 2012-03-19 | 2013-09-30 | Seiko Instruments Inc | 圧電振動片、圧電振動子、発振器、電子機器、及び電波時計 |
| JP2014022862A (ja) | 2012-07-17 | 2014-02-03 | Seiko Epson Corp | 振動片、振動片の周波数調整方法、振動子、発振器および電子機器 |
-
2013
- 2013-12-27 JP JP2013273626A patent/JP2015128268A/ja not_active Withdrawn
-
2014
- 2014-12-22 CN CN201410806740.4A patent/CN104753494A/zh active Pending
- 2014-12-24 US US14/582,606 patent/US9255802B2/en not_active Expired - Fee Related
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003060470A (ja) * | 2001-08-14 | 2003-02-28 | Seiko Epson Corp | 圧電デバイス、圧電デバイスの周波数調整方法、圧電デバイスを利用した携帯電話装置及び圧電デバイスを利用した電子機器 |
| JP2003332871A (ja) * | 2002-05-14 | 2003-11-21 | Seiko Instruments Inc | 圧電振動子及び圧電振動子の製造方法 |
| JP2011193436A (ja) * | 2010-02-18 | 2011-09-29 | Daishinku Corp | 音叉型水晶振動片、音叉型水晶振動子、および音叉型水晶振動片の製造方法 |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20150381143A1 (en) * | 2014-06-30 | 2015-12-31 | Seiko Epson Corporation | Resonator element, method for manufacturing resonator element, resonator, gyro sensor, electronic apparatus, and moving object |
| US9793876B2 (en) * | 2014-06-30 | 2017-10-17 | Seiko Epson Corporation | Resonator element, method for manufacturing resonator element, resonator, gyro sensor, electronic apparatus, and moving object |
| JPWO2020085188A1 (ja) * | 2018-10-24 | 2021-09-02 | 株式会社村田製作所 | 共振装置 |
| JP7133134B2 (ja) | 2018-10-24 | 2022-09-08 | 株式会社村田製作所 | 共振装置 |
| US11909375B2 (en) | 2018-10-24 | 2024-02-20 | Murata Manufacturing Co., Ltd. | Resonance device |
Also Published As
| Publication number | Publication date |
|---|---|
| US20150188515A1 (en) | 2015-07-02 |
| CN104753494A (zh) | 2015-07-01 |
| US9255802B2 (en) | 2016-02-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2015128268A (ja) | 振動素子、振動子、発振器、電子機器、物理量センサー、移動体および振動素子の周波数調整方法 | |
| US12255619B2 (en) | Vibration element, manufacturing method of vibration element, physical quantity sensor, inertial measurement device, electronic apparatus, and vehicle | |
| US20150188514A1 (en) | Resonator element, resonator, oscillator, electronic apparatus, sensor, and mobile object | |
| US9257959B2 (en) | Resonator element, resonator, oscillator, electronic apparatus, sensor, and moving object | |
| JP6435606B2 (ja) | 振動素子、振動子、発振器、電子機器および移動体 | |
| JP6107330B2 (ja) | 振動素子、振動子、発振器、電子機器および移動体 | |
| US20140292433A1 (en) | Resonator element, resonator, oscillator, electronic apparatus, and moving object | |
| TWI649964B (zh) | 振動元件、振動子、振盪器、電子機器及移動體 | |
| JP6179104B2 (ja) | 振動素子、振動子、発振器、電子機器および移動体 | |
| US9287848B2 (en) | Resonator element, resonator, oscillator, electronic apparatus, and moving object having reduced vibration leakage | |
| JP6287208B2 (ja) | 振動子、発振器、電子機器、物理量センサーおよび移動体 | |
| US20140368288A1 (en) | Resonator element, resonator, oscillator, electronic device, and moving object | |
| JP6375611B2 (ja) | 振動片、振動子、発振器、電子機器および移動体 | |
| JP6375612B2 (ja) | 振動片、振動子、発振器、電子機器および移動体 | |
| JP2015128266A (ja) | 振動子の製造方法 | |
| JP2014200050A (ja) | 振動素子、振動子、発振器、電子機器および移動体 | |
| US20140368287A1 (en) | Resonator element, resonator, oscillator, electronic device, and moving object | |
| JP6498379B2 (ja) | 振動素子、振動子、発振器、電子機器および移動体 | |
| JP2015149592A (ja) | 振動素子、振動子、発振器、電子機器および移動体 | |
| JP2014192797A (ja) | 振動片、振動素子、振動子、電子機器、および移動体 | |
| JP2014179914A (ja) | 振動子、発振器、電子機器および移動体 | |
| JP2015097365A (ja) | 振動素子、振動子、発振器、電子機器および移動体 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20161219 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20161219 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20161220 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20171117 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20171212 |
|
| A761 | Written withdrawal of application |
Free format text: JAPANESE INTERMEDIATE CODE: A761 Effective date: 20180123 |