JP2015174172A - ロボット、ロボットシステム、及び制御装置 - Google Patents
ロボット、ロボットシステム、及び制御装置 Download PDFInfo
- Publication number
- JP2015174172A JP2015174172A JP2014051582A JP2014051582A JP2015174172A JP 2015174172 A JP2015174172 A JP 2015174172A JP 2014051582 A JP2014051582 A JP 2014051582A JP 2014051582 A JP2014051582 A JP 2014051582A JP 2015174172 A JP2015174172 A JP 2015174172A
- Authority
- JP
- Japan
- Prior art keywords
- robot
- flexible object
- hand
- captured image
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images








Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1612—Program controls characterised by the hand, wrist, grip control
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/39—Robotics, robotics to robotics hand
- G05B2219/39224—Jacobian transpose control of force vector in configuration and cartesian space
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/39—Robotics, robotics to robotics hand
- G05B2219/39391—Visual servoing, track end effector with camera image feedback
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S901/00—Robots
- Y10S901/46—Sensing device
- Y10S901/47—Optical
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Health & Medical Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Orthopedic Medicine & Surgery (AREA)
- Manipulator (AREA)
- Image Analysis (AREA)
Abstract
Description
この構成により、ロボットは、ハンドと柔軟物の所定部との相対速度を用いて、ハンドを動作させる。これにより、ロボットは、柔軟物に適した作業を行うことができる。
この構成により、ロボットは、シート状の物体を把持し、ハンドとシート状の物体の所定部との相対速度を用いて、ハンドを動作させる。これにより、ロボットは、シート状の物体に適した作業を行うことができる。
この構成により、ロボットは、ハンドと柔軟物の端辺の中点との相対速度を用いて、ハンドを動作させる。これにより、ロボットは、柔軟物の端辺の動きに応じて、柔軟物に適した作業を行うことができる。
この構成により、ロボットは、柔軟物を含む撮像画像を撮像し、撮像画像に基づいて相対速度を算出する。これにより、ロボットは、ハンドと柔軟物の状態を逐次判定することでハンドを動かし、柔軟物に適した作業を行うことができる。
この構成により、ロボットは、第1レンズにより第1方向から入射する柔軟物を含む光を第1撮像素子に集め、第2レンズにより第2方向から入射する柔軟物を含む光を第2撮像素子に集める。これにより、ロボットは、第1撮像素子で撮像された第1撮像画像と第2撮像素子で撮像された第2撮像画像に基づいて、エピポーラ拘束を用いることにより柔軟物の三次元位置及び姿勢を算出することができ、その結果、柔軟物の三次元位置及び姿勢に基づいて柔軟物に適した作業を行うことができる。
この構成により、ロボットは、複数のレンズによって得られる奥行き方向の情報を含む画像を撮像する。これにより、ロボットは、2つの撮像画像に基づいたエピポーラ拘束を用いず、奥行き方向の情報を含む1つの撮像画像に基づいて柔軟物の三次元位置及び姿勢を算出することができるため、算出処理の時間を短縮することができる。
この構成により、ロボットは、撮像画像に基づいて、柔軟物の表面形状を表す近似式を算出し、算出された近似式に基づいて、柔軟物の所定部の位置及び姿勢を算出する。これにより、ロボットは、柔軟物の所定部の位置及び姿勢の変化に基づいて、柔軟物に適した作業を行うことができる。
この構成により、ロボットは、撮像画像のうち、柔軟物の所定部を含む部分領域を抽出し、抽出された部分領域に基づいて、柔軟物の表面形状を表す近似式を算出する。これにより、ロボットは、撮像画像のすべてに基づいて画像処理を行う場合に比べて、画像処理の時間を短縮することができる。
この構成により、ロボットは、柔軟物の所定部の位置及び姿勢と、ハンドに予め設定された点の位置及び姿勢に基づいて、ハンドと柔軟物の相対位置を算出することで、相対速度を算出する。これにより、ロボットは、ハンドと柔軟物の相対位置に基づいて、柔軟物に適した作業を行うことができる。
この構成により、ロボットは、撮像画像と相対速度に基づいてヤコビ行列を算出する。これにより、ロボットは、ヤコビ行列に基づいて、柔軟物に適した作業を行うことができる。
この構成により、ロボットは、ヤコビ行列に基づいてビジュアルサーボで前記ハンドを動かす。これにより、ロボットは、柔軟物に適したビジュアルサーボによる作業を行うことができる。
この構成により、ロボットシステムは、柔軟物を含む撮像画像を撮像し、柔軟物を把持し、ハンドと柔軟物の所定部との相対速度を用いて、ハンドを動作させる。これにより、ロボットシステムは、柔軟物に適した作業を行うことができる。
この構成により、制御装置は、柔軟物を把持するハンドを備えるロボットを動作させ、ハンドと柔軟物の所定部との相対速度を用いて、ハンドを動作させる。これにより、制御装置は、柔軟物に適した作業を行うことができる。
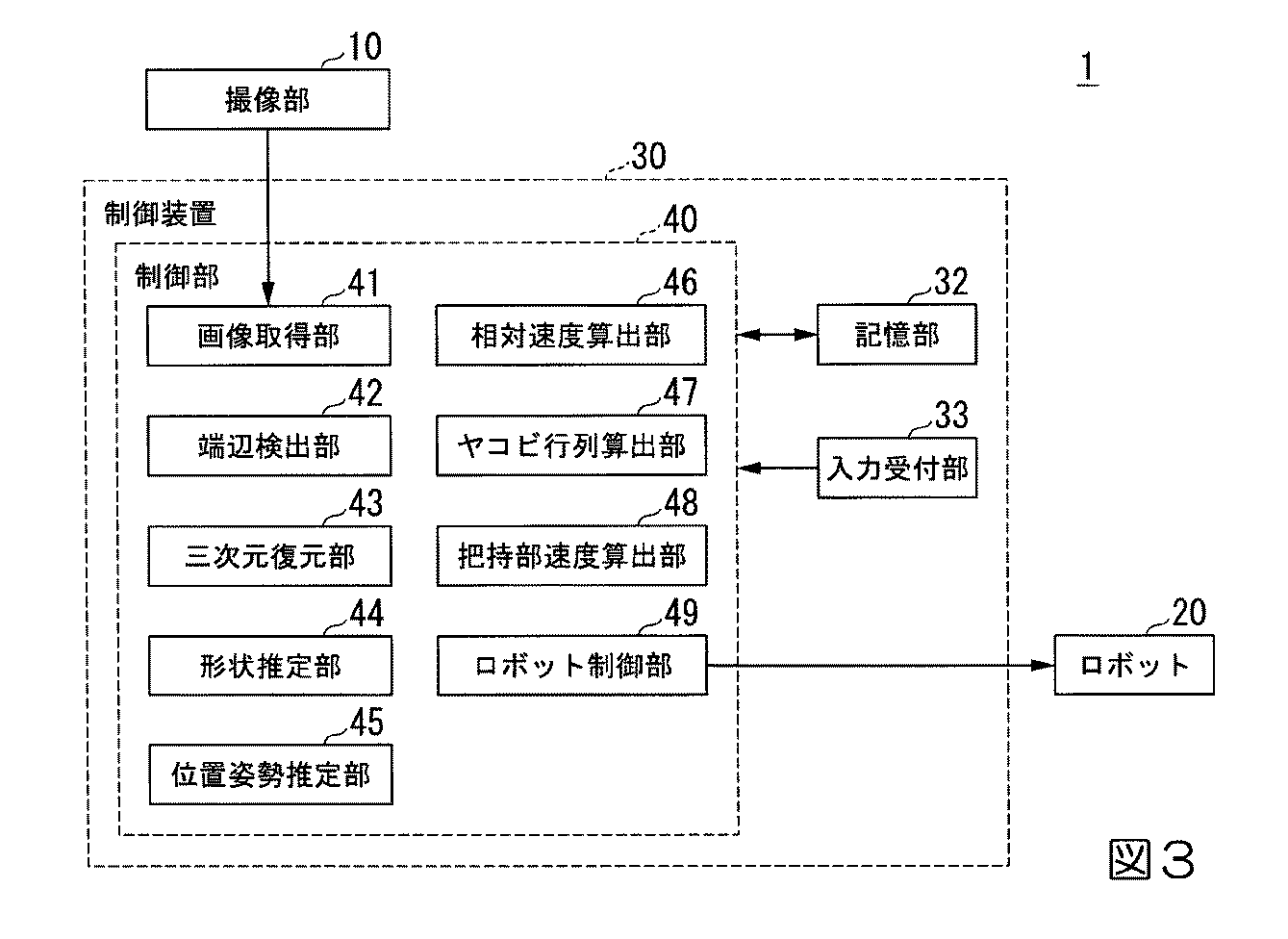
以下、本発明の第1実施形態について、図面を参照して説明する。図1は、第1実施形態に係るロボットシステム1が使用される様子の一例を模式的に示す図である。ロボットシステム1は、例えば、第1撮像部10−1と、第2撮像部10−2と、ロボット20と、制御装置30とを具備する。
通信部34は、例えば、USB等のデジタル入出力ポートとともに、イーサネット(登録商標)ポート等を含んで構成される。
画像取得部41は、撮像部10により撮像された撮像画像を取得する。
ヤコビ行列算出部47は、相対速度算出部46により算出された相対速度と、形状推定部44により生成された柔軟物SのCGに基づいて、柔軟物Sの代表辺のヤコビ行列を算出する。
ロボット制御部49は、把持部速度算出部48により算出された速度に基づいて、把持部HNDを動かすようにロボット20を制御する。また、ロボット制御部49は、画像取得部41により取得された撮像画像に基づいて、ロボット20が所定の作業を完了させたか否かを判定し、所定の作業を完了させたと判定した場合、ロボット20を初期位置の状態となるように制御してロボット20の制御を終了する。
以下、第1実施形態の変形例について説明する。第1実施形態の変形例におけるロボットシステム1は、撮像部10がライトフィールドカメラである。ライトフィールドカメラとは、撮像素子の手前に、異なる焦点を持つマイクロレンズが、撮像素子の面に平行な面上で配列されており、この構成によって得られる奥行き方向の情報を含む画像を利用することで、1台でステレオ撮像を行うことが可能なカメラである。従って、第1実施形態の変形例における制御部40は、ライトフィールドカメラである撮像部10によってステレオ撮像された三次元画像に基づいて、第1実施形態で説明した各種の処理を行う。
また、ロボットシステム1は、柔軟物Sとしてシート状の物体を把持し、把持部HNDとシート状の物体の所定部との相対速度を用いて、把持部HNDを動作させる。これにより、ロボットシステム1は、シート状の物体に適した作業を行うことができる。
また、ロボットシステム1は、把持部HNDと柔軟物Sの代表辺の中点との相対速度を用いて、把持部HNDを動作させる。これにより、ロボットシステム1は、柔軟物Sの代表辺の動きに応じて、柔軟物Sに適した作業を行うことができる。
また、ロボットシステム1は、第1レンズにより第1方向から入射する柔軟物Sを含む光を第1撮像素子に集め、第2レンズにより第2方向から入射する柔軟物Sを含む光を第2撮像素子に集める。これにより、ロボットシステム1は、第1撮像素子で撮像された第1撮像画像と第2撮像素子で撮像された第2撮像画像に基づいて、エピポーラ拘束を用いることにより柔軟物の三次元位置及び姿勢を算出することができ、その結果、柔軟物の三次元位置及び姿勢に基づいて柔軟物に適した作業を行うことができる。
また、ロボットシステム1は、撮像画像に基づいて、柔軟物Sの代表辺と代表辺の両端の2つの辺の形状を表す第1近似式及び第2近似式を算出し、算出された第1近似式及び第2近似式に基づいて、柔軟物Sの代表辺の中点の位置及び姿勢を算出する。これにより、ロボットシステム1は、柔軟物Sの代表辺の中点の位置及び姿勢の変化に基づいて、柔軟物Sに適した作業を行うことができる。
また、ロボットシステム1は、撮像画像のうち、柔軟物Sの代表辺を含む部分領域を抽出し、抽出された部分領域に基づいて、柔軟物Sの表面形状を表す第1近似式及び第2近似式を算出する。これにより、ロボットシステム1は、撮像画像のすべてに基づいて画像処理を行う場合に比べて、画像処理の時間を短縮することができる。
また、ロボットシステム1は、ヤコビ行列に基づいてビジュアルサーボで把持部HNDを動かす。これにより、ロボットシステム1は、柔軟物Sに適したビジュアルサーボによる作業を行うことができる。
以下、本発明の第2実施形態について、図面を参照して説明する。図8は、第2実施形態に係るロボットシステム2が使用される様子の一例を模式的に示す図である。第2実施形態に係るロボットシステム2は、単腕のロボット20に代えて、双腕のロボット20aにより、柔軟物Sに対して所定の作業を行う。なお、第2実施形態では、第1実施形態と同様な構成部には、同じ符号を付して説明を省略する。
ロボット20aは、例えば、把持部HND1と、把持部HND2と、マニピュレーター部MNP1と、マニピュレーター部MNP2と、図示しない複数のアクチュエーターとを、図8に示したように、それぞれの腕に備えた双腕のロボットである。
Claims (13)
- 柔軟物を把持するハンドと、
前記ハンドを動作させる制御部と、
を含み、
前記制御部は、
前記ハンドと前記柔軟物の所定部との相対速度を用いて、前記ハンドを動作させる、
ロボット。 - 請求項1に記載のロボットであって、
前記柔軟物は、シート状の物体である、
ロボット。 - 請求項1又は2に記載のロボットであって、
前記所定部とは、前記柔軟物の端辺の中点である、
ロボット。 - 請求項1から3のうちいずれか一項に記載のロボットであって、
前記柔軟物を含む撮像画像を撮像する撮像部を備え、
前記制御部は、前記撮像画像に基づいて前記相対速度を算出する、
ロボット。 - 請求項4に記載のロボットであって、
前記撮像部は、第1レンズ及び第1撮像素子を備えた第1撮像部と、第2レンズ及び第2撮像素子を備えた第2撮像部、を具備し、前記第1レンズにより第1方向から入射する前記柔軟物を含む光を前記第1撮像素子に集め、前記第2レンズにより第2方向から入射する前記柔軟物を含む光を前記第2撮像素子に集める、
ロボット。 - 請求項4に記載のロボットであって、
前記撮像部は、撮像素子の面に平行な面上に配列された、互いに異なる焦点を有する複数のレンズを備え、前記複数のレンズによって得られる奥行き方向の情報を含む画像を撮像する、
ロボット。 - 請求項4から6のうちいずれか一項に記載のロボットであって、
前記制御部は、前記撮像画像に基づいて、前記柔軟物の表面形状を表す近似式を算出し、算出された近似式に基づいて、前記柔軟物の前記所定部の位置及び姿勢を算出することで、前記相対速度を算出する、
ロボット。 - 請求項7に記載のロボットであって、
前記制御部は、前記撮像画像のうち、前記柔軟物の所定部を含む部分領域を抽出し、抽出された前記部分領域に基づいて、前記柔軟物の表面形状を表す近似式を算出する、
ロボット。 - 請求項7又は8に記載のロボットであって、
前記制御部は、前記柔軟物の所定部の位置及び姿勢と、前記ハンドに予め設定された点の位置及び姿勢に基づいて、前記ハンドと前記柔軟物の相対位置を算出することで、前記相対速度を算出する、
ロボット。 - 請求項7から9のうちいずれか一項に記載のロボットであって、
前記制御部は、前記撮像画像と前記相対速度に基づいてヤコビ行列を算出する、
ロボット。 - 請求項10に記載のロボットであって、
前記制御部は、前記ヤコビ行列に基づいてビジュアルサーボで前記ハンドを動かす、
ロボット。 - 柔軟物を含む撮像画像を撮像する撮像部と、
前記柔軟物を把持するハンドを備えるロボットと、
前記ハンドを動作させる制御部と、を含み、
前記制御部は、
前記ハンドと前記柔軟物の所定部との相対速度を用いて、前記ハンドを動作させる、
ロボットシステム。 - 柔軟物を把持するハンドを備えるロボットを動作させる制御装置であって、
前記ハンドと前記柔軟物の所定部との相対速度を用いて、前記ハンドを動作させる、
制御装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014051582A JP6364836B2 (ja) | 2014-03-14 | 2014-03-14 | ロボット、ロボットシステム、及び制御装置 |
| CN201510067528.5A CN104908024A (zh) | 2014-03-14 | 2015-02-09 | 机械臂、机械臂系统以及控制装置 |
| US14/643,192 US20150258684A1 (en) | 2014-03-14 | 2015-03-10 | Robot, robot system, and control device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014051582A JP6364836B2 (ja) | 2014-03-14 | 2014-03-14 | ロボット、ロボットシステム、及び制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2015174172A true JP2015174172A (ja) | 2015-10-05 |
| JP6364836B2 JP6364836B2 (ja) | 2018-08-01 |
Family
ID=54067994
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014051582A Expired - Fee Related JP6364836B2 (ja) | 2014-03-14 | 2014-03-14 | ロボット、ロボットシステム、及び制御装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20150258684A1 (ja) |
| JP (1) | JP6364836B2 (ja) |
| CN (1) | CN104908024A (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2021033472A1 (ja) | 2019-08-22 | 2021-02-25 | オムロン株式会社 | 制御装置、制御方法、及び制御プログラム |
| US11180619B2 (en) | 2014-09-18 | 2021-11-23 | Borealis Ag | Film with moderate crosslinking |
| JP2023104375A (ja) * | 2022-01-17 | 2023-07-28 | 倉敷紡績株式会社 | ロボット制御システム |
| JP2024001984A (ja) * | 2022-06-23 | 2024-01-11 | 株式会社日立製作所 | 制御システム及び行動生成方法 |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR3032366B1 (fr) * | 2015-02-10 | 2017-02-03 | Veolia Environnement-VE | Procede de tri selectif |
| US10766145B2 (en) * | 2017-04-14 | 2020-09-08 | Brown University | Eye in-hand robot |
| CZ307830B6 (cs) * | 2017-07-18 | 2019-06-05 | ÄŚeskĂ© vysokĂ© uÄŤenĂ technickĂ© v Praze | Způsob a zařízení pro manipulaci s poddajnými tělesy |
| JP7136554B2 (ja) * | 2017-12-18 | 2022-09-13 | 国立大学法人信州大学 | 把持装置、学習装置、プログラム、把持システム、及び学習方法 |
| CN109079780B (zh) * | 2018-08-08 | 2020-11-10 | 北京理工大学 | 基于广义坐标的分布式移动机械臂任务分层优化控制方法 |
| US11241795B2 (en) * | 2018-09-21 | 2022-02-08 | Beijing Jingdong Shangke Information Technology Co., Ltd. | Soft package, robot system for processing the same, and method thereof |
| CN109674211B (zh) * | 2018-12-27 | 2021-03-30 | 成都新红鹰家具有限公司 | 一种智能办公桌 |
| CN110076772B (zh) * | 2019-04-03 | 2021-02-02 | 浙江大华技术股份有限公司 | 一种机械臂的抓取方法及装置 |
| JP2023134270A (ja) | 2022-03-14 | 2023-09-27 | オムロン株式会社 | 経路生成装置、方法、及びプログラム |
| US20250135643A1 (en) * | 2023-11-01 | 2025-05-01 | Northeastern University | System and Method for Manipulating Deformable Objects |
| CN119910646B (zh) * | 2025-01-03 | 2025-09-12 | 广州市池中龙信息科技有限公司 | 一种物体的抓取方法、装置、电子设备及存储介质 |
Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03221392A (ja) * | 1990-01-19 | 1991-09-30 | Matsushita Electric Ind Co Ltd | 把持装置 |
| JP2009107043A (ja) * | 2007-10-29 | 2009-05-21 | Canon Inc | 把持装置および把持装置制御方法 |
| JP2010236893A (ja) * | 2009-03-30 | 2010-10-21 | Toyota Industries Corp | 複数の物体間の相対移動を検出する方法 |
| US20120031549A1 (en) * | 2010-08-06 | 2012-02-09 | Malik Jr Richard S | Tape detection system |
| JP2012200805A (ja) * | 2011-03-24 | 2012-10-22 | Canon Inc | ロボット制御装置、ロボット制御方法、プログラム及び記録媒体 |
| JP2013027957A (ja) * | 2011-07-28 | 2013-02-07 | Fujitsu Ltd | テープ貼着方法及びテープ貼着装置 |
| WO2013080500A1 (ja) * | 2011-11-30 | 2013-06-06 | パナソニック株式会社 | ロボットの教示装置、ロボット装置、ロボットの教示装置の制御方法、ロボットの教示装置の制御プログラム |
| JP2013198015A (ja) * | 2012-03-21 | 2013-09-30 | Casio Comput Co Ltd | 撮像装置、画像処理方法及びプログラム |
| WO2014010207A1 (ja) * | 2012-07-10 | 2014-01-16 | パナソニック株式会社 | 挿入装置の制御装置及び制御方法、制御装置を有する挿入装置、挿入装置の制御プログラム、並びに、挿入装置の制御用集積電子回路 |
| JP2014016309A (ja) * | 2012-07-11 | 2014-01-30 | Ricoh Co Ltd | 距離測定装置および距離計測方法 |
| WO2014024745A1 (ja) * | 2012-08-06 | 2014-02-13 | 富士フイルム株式会社 | 撮像装置 |
Family Cites Families (44)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2277967A (en) * | 1940-12-23 | 1942-03-31 | Ditto Inc | Duplicating machine |
| US3904338A (en) * | 1972-01-31 | 1975-09-09 | Industrial Nucleonics Corp | System and method for controlling a machine continuously feeding a sheet to intermittently activated station |
| JPS514047A (en) * | 1974-07-01 | 1976-01-13 | Nippon Steel Corp | Kinzokuhenno hyomenketsukanbuteireho |
| DE3335421A1 (de) * | 1983-09-29 | 1985-04-18 | Siemens AG, 1000 Berlin und 8000 München | Verfahren zur signalauswertung von ultraschall-echosignalen, wie sie bei verwendung eines ultraschall-sensors an einem roboterarm auftreten |
| JPH03178788A (ja) * | 1989-12-06 | 1991-08-02 | Hitachi Ltd | マニピュレータの制御方法 |
| JPH055928A (ja) * | 1991-01-29 | 1993-01-14 | Ricoh Co Ltd | フアインダ光学系 |
| US5209804A (en) * | 1991-04-30 | 1993-05-11 | United Technologies Corporation | Integrated, automted composite material manufacturing system for pre-cure processing of preimpregnated composite materials |
| US5151745A (en) * | 1991-09-05 | 1992-09-29 | Xerox Corporation | Sheet control mechanism for use in an electrophotographic printing machine |
| US5891295A (en) * | 1997-03-11 | 1999-04-06 | International Business Machines Corporation | Fixture and method for carrying a flexible sheet under tension through manufacturing processes |
| US6003863A (en) * | 1997-03-11 | 1999-12-21 | International Business Machines Corporation | Apparatus and method for conveying a flexible sheet through manufacturing processes |
| US6721444B1 (en) * | 1999-03-19 | 2004-04-13 | Matsushita Electric Works, Ltd. | 3-dimensional object recognition method and bin-picking system using the method |
| US7392937B1 (en) * | 1999-12-03 | 2008-07-01 | Diebold, Incorporated | Card reading arrangement involving robotic card handling responsive to card sensing at a drive-up automated banking machine |
| US6443359B1 (en) * | 1999-12-03 | 2002-09-03 | Diebold, Incorporated | Automated transaction system and method |
| US7195153B1 (en) * | 1999-12-03 | 2007-03-27 | Diebold, Incorporated | ATM with user interfaces at different heights |
| JP3409160B2 (ja) * | 2000-04-26 | 2003-05-26 | 独立行政法人産業技術総合研究所 | 把握データ入力装置 |
| JP2005515910A (ja) * | 2002-01-31 | 2005-06-02 | ブレインテック カナダ インコーポレイテッド | シングルカメラ3dビジョンガイドロボティクスの方法および装置 |
| JP4138671B2 (ja) * | 2002-04-11 | 2008-08-27 | 松下電器産業株式会社 | ズームレンズ及びそれを用いた電子スチルカメラ |
| US20040071534A1 (en) * | 2002-07-18 | 2004-04-15 | August Technology Corp. | Adjustable wafer alignment arm |
| JP4080932B2 (ja) * | 2003-03-31 | 2008-04-23 | 本田技研工業株式会社 | 2足歩行ロボットの制御装置 |
| JP4231320B2 (ja) * | 2003-03-31 | 2009-02-25 | 本田技研工業株式会社 | 移動体の検出装置 |
| JP2005144642A (ja) * | 2003-11-19 | 2005-06-09 | Fuji Photo Film Co Ltd | シート体の加工装置 |
| WO2006043396A1 (ja) * | 2004-10-19 | 2006-04-27 | Matsushita Electric Industrial Co., Ltd. | ロボット装置 |
| JP4975503B2 (ja) * | 2007-04-06 | 2012-07-11 | 本田技研工業株式会社 | 脚式移動ロボット |
| JP4371153B2 (ja) * | 2007-06-15 | 2009-11-25 | トヨタ自動車株式会社 | 自律移動装置 |
| DE112008003884T5 (de) * | 2008-05-29 | 2011-06-22 | Harmonic Drive Systems Inc. | Komplexer Sensor und Roboterhand |
| JP4678550B2 (ja) * | 2008-11-19 | 2011-04-27 | ソニー株式会社 | 制御装置および方法、並びにプログラム |
| JP2010249798A (ja) * | 2009-03-23 | 2010-11-04 | Ngk Insulators Ltd | 目封止ハニカム構造体の検査装置及び目封止ハニカム構造体の検査方法 |
| JP2011000703A (ja) * | 2009-05-19 | 2011-01-06 | Canon Inc | カメラ付きマニピュレータ |
| WO2011036865A1 (ja) * | 2009-09-28 | 2011-03-31 | パナソニック株式会社 | ロボットアームの制御装置及び制御方法、ロボット、ロボットアームの制御プログラム、及び、ロボットアーム制御用集積電子回路 |
| US8934003B2 (en) * | 2010-01-08 | 2015-01-13 | Koninklijkle Philips N.V. | Uncalibrated visual servoing using real-time velocity optimization |
| US8861171B2 (en) * | 2010-02-10 | 2014-10-14 | Sri International | Electroadhesive handling and manipulation |
| US8325458B2 (en) * | 2010-02-10 | 2012-12-04 | Sri International | Electroadhesive gripping |
| JP5803124B2 (ja) * | 2011-02-10 | 2015-11-04 | セイコーエプソン株式会社 | ロボット、位置検出装置、位置検出プログラム、および位置検出方法 |
| WO2012128909A2 (en) * | 2011-03-18 | 2012-09-27 | Applied Materials, Inc. | Process for forming flexible substrates using punch press type techniques |
| JP5792983B2 (ja) * | 2011-04-08 | 2015-10-14 | キヤノン株式会社 | 表示制御装置および表示制御方法 |
| US8639644B1 (en) * | 2011-05-06 | 2014-01-28 | Google Inc. | Shared robot knowledge base for use with cloud computing system |
| WO2012153629A1 (ja) * | 2011-05-12 | 2012-11-15 | 株式会社Ihi | 運動予測制御装置と方法 |
| DE102011106214A1 (de) * | 2011-06-07 | 2012-12-13 | Brötje-Automation GmbH | Endeffektor |
| CN104010774B (zh) * | 2011-09-15 | 2017-10-13 | 康富真信息技术股份有限公司 | 用于自动生成机器人程序的系统和方法 |
| JP5977544B2 (ja) * | 2012-03-09 | 2016-08-24 | キヤノン株式会社 | 情報処理装置、情報処理方法 |
| JP6021533B2 (ja) * | 2012-09-03 | 2016-11-09 | キヤノン株式会社 | 情報処理システム、装置、方法及びプログラム |
| JP6473693B2 (ja) * | 2012-12-13 | 2019-02-20 | ゾルナウ,ジョナソン | 可撓性を有する構成要素材料の属性を一時的に変えることにより商品の組み立ての円滑化 |
| CN104552322A (zh) * | 2013-10-28 | 2015-04-29 | 精工爱普生株式会社 | 把持装置、机器人以及把持方法 |
| JP6317618B2 (ja) * | 2014-05-01 | 2018-04-25 | キヤノン株式会社 | 情報処理装置およびその方法、計測装置、並びに、作業装置 |
-
2014
- 2014-03-14 JP JP2014051582A patent/JP6364836B2/ja not_active Expired - Fee Related
-
2015
- 2015-02-09 CN CN201510067528.5A patent/CN104908024A/zh active Pending
- 2015-03-10 US US14/643,192 patent/US20150258684A1/en not_active Abandoned
Patent Citations (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03221392A (ja) * | 1990-01-19 | 1991-09-30 | Matsushita Electric Ind Co Ltd | 把持装置 |
| US5176492A (en) * | 1990-01-19 | 1993-01-05 | Matsushita Electric Industrial Co., Ltd. | Gripping device |
| JP2009107043A (ja) * | 2007-10-29 | 2009-05-21 | Canon Inc | 把持装置および把持装置制御方法 |
| US20100256818A1 (en) * | 2007-10-29 | 2010-10-07 | Canon Kabushiki Kaisha | Gripping apparatus and gripping apparatus control method |
| JP2010236893A (ja) * | 2009-03-30 | 2010-10-21 | Toyota Industries Corp | 複数の物体間の相対移動を検出する方法 |
| US20120031549A1 (en) * | 2010-08-06 | 2012-02-09 | Malik Jr Richard S | Tape detection system |
| JP2012200805A (ja) * | 2011-03-24 | 2012-10-22 | Canon Inc | ロボット制御装置、ロボット制御方法、プログラム及び記録媒体 |
| JP2013027957A (ja) * | 2011-07-28 | 2013-02-07 | Fujitsu Ltd | テープ貼着方法及びテープ貼着装置 |
| WO2013080500A1 (ja) * | 2011-11-30 | 2013-06-06 | パナソニック株式会社 | ロボットの教示装置、ロボット装置、ロボットの教示装置の制御方法、ロボットの教示装置の制御プログラム |
| JP2013198015A (ja) * | 2012-03-21 | 2013-09-30 | Casio Comput Co Ltd | 撮像装置、画像処理方法及びプログラム |
| WO2014010207A1 (ja) * | 2012-07-10 | 2014-01-16 | パナソニック株式会社 | 挿入装置の制御装置及び制御方法、制御装置を有する挿入装置、挿入装置の制御プログラム、並びに、挿入装置の制御用集積電子回路 |
| JP2014016309A (ja) * | 2012-07-11 | 2014-01-30 | Ricoh Co Ltd | 距離測定装置および距離計測方法 |
| WO2014024745A1 (ja) * | 2012-08-06 | 2014-02-13 | 富士フイルム株式会社 | 撮像装置 |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11180619B2 (en) | 2014-09-18 | 2021-11-23 | Borealis Ag | Film with moderate crosslinking |
| WO2021033472A1 (ja) | 2019-08-22 | 2021-02-25 | オムロン株式会社 | 制御装置、制御方法、及び制御プログラム |
| US12090673B2 (en) | 2019-08-22 | 2024-09-17 | Omron Corporation | Control apparatus, control method, and computer-readable storage medium storing a control program |
| JP2023104375A (ja) * | 2022-01-17 | 2023-07-28 | 倉敷紡績株式会社 | ロボット制御システム |
| JP7724164B2 (ja) | 2022-01-17 | 2025-08-15 | 倉敷紡績株式会社 | ロボット制御システム |
| JP2024001984A (ja) * | 2022-06-23 | 2024-01-11 | 株式会社日立製作所 | 制御システム及び行動生成方法 |
| JP7763151B2 (ja) | 2022-06-23 | 2025-10-31 | 株式会社日立製作所 | 制御システム及び行動生成方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6364836B2 (ja) | 2018-08-01 |
| US20150258684A1 (en) | 2015-09-17 |
| CN104908024A (zh) | 2015-09-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6364836B2 (ja) | ロボット、ロボットシステム、及び制御装置 | |
| JP6180087B2 (ja) | 情報処理装置及び情報処理方法 | |
| EP2915635B1 (en) | Robot, robot system, control device, and control method | |
| JP6180086B2 (ja) | 情報処理装置及び情報処理方法 | |
| JP6222898B2 (ja) | 3次元計測装置及びロボット装置 | |
| JP6699097B2 (ja) | ロボット及び制御装置 | |
| WO2019146201A1 (ja) | 情報処理装置、情報処理方法及び情報処理システム | |
| JP2018051704A (ja) | ロボット制御装置、ロボット、及びロボットシステム | |
| JP2017170571A (ja) | ロボット、ロボット制御装置、及びロボットシステム | |
| CN114310901A (zh) | 用于机器人的坐标系标定方法、装置、系统以及介质 | |
| CN105313102A (zh) | 机器人、机器人系统以及控制方法 | |
| CN112109069A (zh) | 机器人示教装置以及机器人系统 | |
| JP2018122376A (ja) | 画像処理装置、ロボット制御装置、及びロボット | |
| CN106476015A (zh) | 机器人、控制装置以及机器人系统 | |
| JP6455869B2 (ja) | ロボット、ロボットシステム、制御装置、及び制御方法 | |
| JP2017202549A (ja) | ロボット制御装置、ロボット、及びロボットシステム | |
| JP2017100197A (ja) | ロボット、及び制御方法 | |
| JP2015100868A (ja) | ロボットシステム | |
| CN115026808A (zh) | 手眼标定方法、手眼标定系统、计算机设备及存储装置 | |
| JP2015226954A (ja) | ロボット、ロボットの制御方法、及びロボットの制御装置 | |
| JP2016013610A (ja) | ロボット、及び制御方法 | |
| JP2017052073A (ja) | ロボットシステム、ロボット、及びロボット制御装置 | |
| JP2021091070A (ja) | ロボット制御装置 | |
| JP2018034245A (ja) | ロボット、ロボット制御装置、及びロボットシステム | |
| JP2020059064A (ja) | ロボットツールセンターポジションのずれ検出装置及び検出方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20161207 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20171019 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20171024 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20171222 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180605 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180618 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6364836 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |