JP2015190829A - 流動体の降伏値を求める方法、そのプログラム及び装置 - Google Patents
流動体の降伏値を求める方法、そのプログラム及び装置 Download PDFInfo
- Publication number
- JP2015190829A JP2015190829A JP2014067681A JP2014067681A JP2015190829A JP 2015190829 A JP2015190829 A JP 2015190829A JP 2014067681 A JP2014067681 A JP 2014067681A JP 2014067681 A JP2014067681 A JP 2014067681A JP 2015190829 A JP2015190829 A JP 2015190829A
- Authority
- JP
- Japan
- Prior art keywords
- value
- drive current
- yield
- vibrator
- electromagnetic coil
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images



Landscapes
- Apparatuses For Generation Of Mechanical Vibrations (AREA)
Abstract
【課題】音叉振動式粘度計を利用して、精度の高い降伏値を得ることを提案する。
【解決手段】音叉振動式粘度計1で、流動体4に挿入される一対の振動子3,3と、振動子3の振幅値を検出する変位センサ11と、電磁コイル10bを備えた電磁駆動部10と、電磁コイル10bに流す駆動電流を零から設置値まで増大又は設定値から零まで減少させる駆動電流制御手段35と、駆動電流値i及びこれに対応する振幅値Aを記録する記憶手段39と、振幅値Aの変局点を判断し、そのときの駆動電流値iを降伏値とする降伏値測定手段35と、を備える。
【選択図】図3
【解決手段】音叉振動式粘度計1で、流動体4に挿入される一対の振動子3,3と、振動子3の振幅値を検出する変位センサ11と、電磁コイル10bを備えた電磁駆動部10と、電磁コイル10bに流す駆動電流を零から設置値まで増大又は設定値から零まで減少させる駆動電流制御手段35と、駆動電流値i及びこれに対応する振幅値Aを記録する記憶手段39と、振幅値Aの変局点を判断し、そのときの駆動電流値iを降伏値とする降伏値測定手段35と、を備える。
【選択図】図3
Description
本発明は、流動体の物性評価に関する降伏値を求める方法、そのプログラム及び装置に関する。
流動体のうち、マヨネーズやケチャップ、クリーム等のように、静的な状態では固体(形を保つ)だが、外力が加わると液体(流動する)となる、塑性(ビンガム性)という性質を備えるものが知られている。このような塑性流体では、流動しはじめるときの応力、すなわち降伏値とよばれる値が、物性を評価するときの重要な要素となるため、降伏値を正確に知りたいというニーズがある。
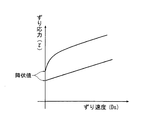
一般的には、図4に示すように、流動体にかかるずり速度とずり応力の二軸を取り、ずり速度を変化させたときのずり応力をプロットして流動曲線を描いたとき、ずり応力がはじめて零から立ち上がる応力が、降伏値とされている。これに対し、流動体の物性を測定する装置としては、振動式粘度計、回転式粘度計等が利用されている。振動式粘度計には、回転振動式粘度計と、音叉振動式粘度計がある。
回転振動式粘度計は、測定する流動体の試料に単一の振動子を挿入し、回転子を回転方向に共振させ、共振時の回転子の振幅の減衰を測定し、粘度に換算する(特許文献1)。
音叉振動式粘度計は、試料に一対の振動子を挿入し、一対の振動子を逆位相で振動させ、振動子の振幅が一定となるように振動子の駆動電流を制御して、この駆動電流を粘度に換算する(特許文献2)。
回転式粘度計は、試料に回転子を挿入し、回転子の回転数を停止状態から上げ、回転数に対応するトルクを測定する(特許文献3)。
しかし、降伏値は、流動体が動きはじめる応力の限界値であるので、これを測定するには、流動体の組成を壊すことなく、微小な組成の変化を検知するよう外力を変化させなければならない。
これに対し、回転振動式粘度計は、駆動部に圧電素子が利用されているため、振動子に与える振動周波数が高く(約1kHz)、試料に加わるストレスが大きいため、流動体の組成が乱されているおそれがある。また、その測定原理からも、試料に与える応力を直接制御することはできないため、降伏値を測定することは難しい。
音叉振動式粘度計は、駆動周波数が低い(約30Hz)ことが特徴の一つであり、試料に加わるストレスが小さく、試料の組成を壊しがたいと言える。しかし、その測定原理は、振動子の振幅(ずり速度)が一定という条件下で駆動電流(ずり応力)を測定するのであって、試料に与える応力を制御することはできないため、降伏値を測定することは出来ない。
回転式粘度計は、回転子の回転数がずり速度に比例するとの考え方から、回転数(ずり速度)に対するトルク(ずり応力)を測定するので、トルクの測定点の回帰直線を求め、その切片を降伏値として測定するものもある(特に、特許文献3の段落0019)。しかし、回転式粘度計は、測定対象が低粘度や低ずり速度であると、回転子のトルクが試料に伝わりにくく、精度が悪いことが知られており、低ずり速度域にあらわれる降伏値も、正確な値が得られているか確かではない。
このように、従来の粘度計では、正確な降伏値は測定できないという問題があった。本発明は、従来技術の問題を解決するために、音叉振動式粘度計を利用して、精度の高い降伏値を得ることを提案することで、より実態に近い流動体の物性解明に貢献しようとするものである。
前記目的を達成するために、本発明に係る音叉振動式粘度計では、流動体に挿入される一対の振動子と、前記振動子の振幅値を検出する変位センサと、前記振動子に電磁振動を加振する、電磁コイルを備えた電磁駆動部と、前記電磁コイルに流す駆動電流を、零から設置値まで増大又は設定値から零まで減少させる駆動電流制御手段と、前記駆動電流の値及びこれに対応する前記振幅値を記録する記憶手段と、前記振幅値の変局点を判断し、そのときの前記駆動電流値を降伏値とする降伏値測定手段と、を備えることを特徴とする。
また、本発明に係る降伏値の測定方法では、流動体に挿入される一対の振動子と、前記振動子の振幅値を検出する変位センサと、前記振動子に電磁振動を加振する、電磁コイルを備えた電磁駆動部と、前記電磁コイルに流す駆動電流を、零から設置値まで増大又は設定値から零まで減少させる駆動電流制御手段と、を備える音叉振動式粘度計を用いた降伏値の測定方法であって、前記電磁コイルに流す測定開始駆動電流値を決定する開始値設定ステップと、前記電磁コイルに流す測定停止駆動電流値を決定する停止値設定ステップと、前記駆動電流を変更させる駆動電流制御ステップと、振動子の振動開始から停止まで、前記駆動電流の値及び前記振幅値を記録する記録ステップと、前記振幅値の変局点を判断し、そのときの前記駆動電流値を降伏値として算出する降伏値測定ステップと、を備えることを特徴とする。
好ましくは、本発明に係る音叉振動式粘度計では、前記降伏値測定手段で、前記降伏値は、前記振幅値の変局点と対応する駆動電流値である降伏駆動電流値と、前記電磁コイルの磁束密度と、前記電磁コイルのコイル長と、の積を、前記振動子のてこ比で除して得られる、振動子にかかるトルクである降伏駆動力に換算する。
好ましくは、本発明に係る降伏値の測定方法では、前記降伏値測定ステップは、前記降伏値は、前記振幅値の変局点と対応する駆動電流値である降伏駆動電流値と、前記電磁コイルの磁束密度と、前記電磁コイルのコイル長と、の積を、前記振動子のてこ比で除して得られる、振動子にかかるトルクである降伏駆動力に換算する。
好ましくは、本発明に係る降伏値の測定方法は、コンピュータプログラムで記載され実行される。
本発明の音叉振動式粘度計によれば、一対の振動子を共振振動させる駆動電流を、零から設置値まで増大又は設定値から零まで減少させるように制御し、この駆動電流の変更に対する振動子の振幅の変化を検出し、振幅値の変局点に対応する駆動電流値を降伏値とするので、精度の高い降伏値を得ることができる。
次に、本発明の好適な実施の形態について説明する。
図1は、本発明に係る音叉振動式粘度計1の駆動機構部2の構成概略図である。音叉振動式粘度計1の本体及び駆動機構部2の構成は、従来の構成と同様であるため、適宜説明を簡略する。
駆動機構部2の、符号3,3は、測定用容器(図示せず)に入れられた試料4中に挿入される一対の振動子であり、セラミック部材や金属部材等の薄肉平板状の板材から形成され、先端に円形状の拡大部が設けられている。この拡大部が、試料4との接液部3aとなる。
符号5,5は、一対の板バネであり、板バネ5,5に対し、振動子3,3の基端部が、接続部材6,6を介して固定されている。板バネ5の振動子接続側端部と反対の端部は、逆凸形状のフレーム7の左右凸部に固定されている。板バネ5の長手方向中央部には、薄肉部が形成されている。フレーム7は、図示しない粘度計1本体のスタンドにより支持されており、本体に設置のハンドル操作により、昇降及び前後移動可能に構成されている。これにより、一対の振動子3,3は、一定の深さでもって試料4に挿入され、厚み方向の中心軸が試料4中で同一平面上に位置するように配置される。フレーム7の下方凸部には、試料用温度センサ8、駆動機構部温度センサ9が設けられている。
符号10は電磁駆動部であり、振動子3と接続する接続部材6の中央部に固定されたフェライト磁石10aの一端部が、フレーム7の下方凸部側面に固定された電磁コイル10bの内側に挿入された、ムービングマグネット方式として構成されている。この電磁駆動部10により、板バネ5,5を一定の振動数で逆位相に強制的に共振振動させることで、振動子3,3が同様の振動をする。符号11は渦電流損検出非接触型の変位センサである。変位センサ11は、振動子3の振幅は振動子3と一体となっている板バネ5の振幅と同等であるとして、フレーム7に、板バネ5の振動子接続側端部と近接する位置に固定され、板バネ5の振幅値を検出する。
次に、図2は、本発明に係る音叉振動式粘度計の制御駆動系のブロック図である。
符号30a、30b、30cはアンプ、符号31は正弦波発生回路、符号32はV/I変換回路、符号33は整流器、符号34,41はA/D変換器、符号35は、CPU、ROM、RAM等を内蔵するマイコン、符号36は電圧変換回路、符号37は表示部、符号38はキースイッチ部、符号39はメモリ、符号41は入力選択部、である。後述で明らかとなるように、マイコン35が、駆動電流制御手段及び降伏値測定手段、メモリ39が記憶手段である。なお、A/D変換器34,41、電圧変換回路36等が適宜マイコン35に内蔵される構成も当然に想定される。
降伏値の測定を開始すると、例えば水晶振動子(図示せず)等の発振器で生成された30Hzの基準駆動信号が、アンプ30aで増幅され、正弦波発生回路31、V/I変換回路32を経て正弦波信号に変調されて、駆動電流が電磁コイル10bに流れる。これにより、電磁駆動部10で磁力が発生し、振動子3,3が逆位相の共振振動を開始する。これを受けた振動子3の振幅が変位センサ11により検出される。検出された振幅値Aの信号は、アンプ30cで増幅され、整流器33で整流され、A/D変換器34でデジタル信号となって、マイコン35に入力される。
マイコン35は、PWM変調回路を有しており、電磁コイル10bに入力される駆動電流を後述の手順で制御するためのPWM信号を、電圧変換回路36に出力する。
マイコン35から電圧変換回路36を経て出力された信号は、アンプ30bで増幅され、正弦波発生回路31で基準駆動信号と合成される。合成によって変調された駆動信号が、V/I変換回路32を経て、駆動電流として電磁コイル10bに流れる。このPWM変調後の駆動電流値iは、予めROM等に記憶されているマイコン35から出力されるPWM信号との対応値として得られる。駆動電流値iと振幅値Aの測定値は、メモリ39に記録される。この手順が、降伏値測定終了まで繰り返される。
また、試料用温度センサ8、駆動機構部温度センサ9からの信号は、マイコンからの入力選択信号にもとづいて、入力選択部40によって一定のタイミングで切換られ、A/D変換器41でデジタル信号となって、マイコン35に入力され、マイコンの入力選択信号によって、メモリ39の別の領域に記録される。試料用温度センサ8からの信号により算出された試料温度は、操作者の要求に応じて適宜表示部37等に出力される。また、駆動機構部温度センサ9からの信号により算出された駆動機構部の温度は、必要に応じ測定値の補正に使用される。
すなわち、従来の音叉振動式粘度計は、振動子3の振幅が一定となるように駆動電流を増減させ、駆動電流値iから粘度を算出するような制御系であったのに対し、本音叉振動式粘度計1は、駆動電流値iを設定に基づいて可変し、この駆動電流値iの変更による振動子3の振幅の変化を連続的に測定する制御系として構成されている。
以下、駆動電流値iの制御手順及び降伏値の測定方法について、図3のフローチャートに基づき説明する。図3は本発明に係る降伏値測定のフローチャートである。
まず、ステップS1で、振動子3を振動させるための駆動電流値iの初期状態、測定開始駆動電流値Isを設定する。駆動電流値iを増加させていく場合、駆動電流値iの初期状態はゼロ(Is=0)を設定する。駆動電流値iを減少させていく場合、駆動電流値iの所定の設定値(最大値)を設定する。ステップS1が、開始値設定ステップである。
次に、ステップS2で、駆動電流値iを一定時間毎に変化させていくための変化の割合、駆動電流変化量Ic、単位測定時間Tcを設定する。これにより単位測定時間Tc経過毎に、駆動電流値iが駆動電流変化量Ic分、変化することになる。駆動電流値iを増加させていく場合、Icは正となる。駆動電流値iを減少させていく場合、Icは負となる。
駆動電流変化量Icに従って、一定時間毎に駆動電流値iを変化させていき、所定の駆動電流に達すると測定を停止するが、ステップS3で、測定を停止するときの駆動電流値、測定停止駆動電流値Ieを設定する。ステップS3が、停止値設定ステップである。
ステップS1〜S3の設定は、基本的に操作者によってキースイッチ部38等を介して任意に行われる。但し、測定開始駆動電流値Is、駆動電流変化量Ic、単位測定時間Tc、測定停止駆動電流値Ieは、好適なパターンを予めマイコン35内のROMやメモリ39に格納しておいてもよい。この場合、操作者が駆動電流値iを増大させるか減少させるかのみ選択することで、開始値設定ステップおよび停止値設定ステップが行われる。
次に、ステップS4で、操作者による測定開始の指示に従い、降伏値の測定を開始する。測定が開始されれば、ステップS5に進める。開始されない場合はステップS4に戻る。
ステップS5に進むと、マイコン35により基準駆動信号を変調し、駆動電流値iを測定開始駆動電流値Isにする。
次に、ステップS6で、測定タイマtmをリセットする。測定タイマiは、マイコン35に内蔵されるカウンタ等で、駆動電流値iを変化させるタイミングを検出するために用いられるもので、一定時間毎に増加し更新されるものである。
次に、ステップS7で、変位センサ11で、駆動電流値iに対応した振動子3の振幅を測定し、そのときの駆動電流値i、測定した振幅値Aを、刻々連続的に、メモリ39に記録する。この駆動電流値i及び振幅値Aは、パーソナルコンピュータなどの外部機器に出力しても良い。ステップS7が、記録ステップである。
次に、ステップS8で、タイマtm が単位測定時間 Tc に達するか否かを判定する。単位測定時間 Tc に達する場合はステップS9に進める。達していない場合は、ステップS7に戻り振幅値Aの測定を継続する。
ステップS9に進むと、ステップS1〜S3の設定に基づき、設定された駆動電流変化量 Ic に従い、駆動電流値iが(i=i+Ic)となるよう、マイコン35からPMW信号が出力され、駆動電流値iが変更される。ステップS9が、駆動電流制御ステップである。
次に、ステップS10で、駆動電流値iが測定停止駆動電流値Ieに達したか否かを判定する。駆動電流値iが測定停止駆動電流値Ieに達した場合はステップS11に進める。達していない場合は、ステップS6に戻り測定を継続する。
ステップS11に進むと、駆動電流値iが測定停止駆動電流値Ieに達しているので、測定を停止し、駆動電流値iをゼロにして、振動子3の振動を停止する。
次に、ステップS12で、刻々と連続的に記録された駆動電流値iと振幅値Aの関係で、マイコン35に内蔵されるCPUによって、振幅値Aの変局する点を判断し、そのときの駆動電流値iを降伏値(Iy:降伏駆動電流値)として求める。すなわち、ステップS12が、降伏値測定ステップである。なお、駆動電流は正弦波となるため、駆動電流値iの測定値は実効値とする。
なお、振幅値Aの変局点の判断は、駆動電流を増加させていく場合は、振動子が振幅を開始した点、または一定以上の振幅となった点、駆動電流を減少させていく場合は、振動子が振動を停止した点、または一定以下の振幅となった点等とする。更に詳しく判断するためには、駆動電流(即ち、流動体に与える応力[τ]に相関)と、振動子の振幅(即ち、ずり速度[Ds]に相関)の比率(τ/Ds)から、粘度に相当する物理量(塑性粘度とする)を刻々と算出し、更に塑性粘度の変化の微分を行い、微分値の絶対値が最大となる点などから、変局点を判断するのが好ましい。
なお、降伏値は、低ずり応力で確認されることを考慮すれば、降伏値を算出するステップS12は、測定終了を待って算出する必要はなく、ステップS7で、所定時間経過後(例えば10秒〜1分程度経過後)に、データの記録と同時平行して降伏値を算出してもよい。
また、上記降伏値は、降伏駆動電流値Iy[mA]として算出されるが、ステップS12(或いはステップS7)で、振動子3にかかるトルクに換算した降伏駆動力Fyに換算しても良い。
音叉振動式粘度計1では、振動子3が試料4中でサイン波での往復運動を行うため、試料4中で振動子3を動かすために必要な力(トルク)が働く。よって、振動子3の接液部3aの中心3oにおける駆動力Fを考えると、電磁駆動部10で発生する力F1を、振動子3の支点となる板バネ5の最薄肉部5aを基準とし、電磁駆動部10の上下方向中心までの距離d1と振動子接液部中心3oまでの距離d2の比(てこ比)αで除すことで求められる。電磁駆動部10で発生する力F1は、電磁コイル10bの磁束密度B、電磁コイル10bに流れる駆動電流i及び電磁コイル10bのコイル長Lの積から求められる。てこ比α、磁束密度B、コイル長Lは、装置構成から既知の値となる。ここで、駆動電流iに、降伏駆動電流値Iyを用いれば、式 Fy=BIyL/ α で、トルクに換算した降伏駆動力Fy[N]が得られる。さらに、振動子の接液面積(接液部3aの面積)で除して、単位系を[Pa]としてもよい。
本実施例によれば、本音叉振動式粘度計1は、一対の振動子3を共振振動させる駆動電流を、零から設置値まで増大又は設定値から零まで減少させるように制御し、この駆動電流値iの変更に対する振動子3の振幅値Aの変化を検出し、振幅値の変局点に対応する駆動電流値iを降伏値とするので、精度の高い降伏値を得ることができる。
すなわち、本音叉振動式粘度計1は、振動子3,3の共振を利用して、振動子3を微小な駆動力(駆動電流)で駆動かつ駆動電流を微小範囲で可変させることができるので、試料4に与えるストレスが小さく、試料4の組成変化が生じ難いから、特に低エネルギー下で確認される降伏値を、他の粘度計の測定値よりも信頼性高く正確に捉えることができる。
また、音叉振動式粘度計1は、駆動力(駆動電流)を直接制御し、駆動電流値iの変更に対する振幅値Aの変化を連続的な状態変化として測定することができるため、降伏値だけでなく、同測定中に流動体のレオロジー性(ニュートン、非ニュートン性等)も容易に求められる。
1…音叉振動式粘度計、2…駆動機構部、 3…振動子、 4…試料、 5… 板バネ、 10…電磁駆動部、 10a…フェライト磁石、10b…電磁コイル、 11…変位センサ、 30a、30b、30c…アンプ、 31… 正弦波発生回路、 32…V/I変換器、 33…整流器、 34…A/D変換器
35…マイコン、 36…電圧変換器、 37…表示部、 38…キースイッチ部、 39…メモリ、 40…入力選択部、 41…A/D変換器
35…マイコン、 36…電圧変換器、 37…表示部、 38…キースイッチ部、 39…メモリ、 40…入力選択部、 41…A/D変換器
Claims (5)
- 流動体に挿入される一対の振動子と、
前記振動子の振幅値を検出する変位センサと、
前記振動子に電磁振動を加振する、電磁コイルを備えた電磁駆動部と、
前記電磁コイルに流す駆動電流を、零から設置値まで増大又は設定値から零まで減少させる駆動電流制御手段と、
前記駆動電流の値及びこれに対応する前記振幅値を記録する記憶手段と、
前記振幅値の変局点を判断し、そのときの前記駆動電流値を降伏値とする降伏値測定手段と、
を備えることを特徴とする音叉振動式粘度計。 - 流動体に挿入される一対の振動子と、
前記振動子の振幅値を検出する変位センサと、
前記振動子に電磁振動を加振する、電磁コイルを備えた電磁駆動部と、
前記電磁コイルに流す駆動電流を、零から設置値まで増大又は設定値から零まで減少させる駆動電流制御手段と、を備える音叉振動式粘度計を用いた降伏値の測定方法であって、
前記電磁コイルに流す測定開始駆動電流値を決定する開始値設定ステップと、
前記電磁コイルに流す測定停止駆動電流値を決定する停止値設定ステップと、
前記駆動電流を変更させる駆動電流制御ステップと、
振動子の振動開始から停止まで、前記駆動電流の値及び前記振幅値を記録する記録ステップと、
前記振幅値の変局点を判断し、そのときの前記駆動電流値を降伏値として算出する降伏値測定ステップと、
を備えることを特徴とする降伏値の測定方法。 - 前記降伏値測定手段で、前記降伏値は、前記振幅値の変局点と対応する駆動電流値である降伏駆動電流値と、前記電磁コイルの磁束密度と、前記電磁コイルのコイル長と、の積を、前記振動子のてこ比で除して得られる、振動子にかかるトルクである降伏駆動力に換算されることを特徴とする、請求項1に記載の音叉振動式粘度計。
- 前記降伏値測定ステップは、前記降伏値は、前記振幅値の変局点と対応する駆動電流値である降伏駆動電流値と、前記電磁コイルの磁束密度と、前記電磁コイルのコイル長と、の積を、前記振動子のてこ比で除して得られる、振動子にかかるトルクである降伏駆動力に換算することを特徴とする、請求項2に記載の降伏値の測定方法。
- 前記請求項2又は4に記載の降伏値の測定方法を、コンピュータプログラムで記載し、それを実行可能にしたことを特徴とする、降伏値計算プログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014067681A JP2015190829A (ja) | 2014-03-28 | 2014-03-28 | 流動体の降伏値を求める方法、そのプログラム及び装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014067681A JP2015190829A (ja) | 2014-03-28 | 2014-03-28 | 流動体の降伏値を求める方法、そのプログラム及び装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2015190829A true JP2015190829A (ja) | 2015-11-02 |
Family
ID=54425432
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014067681A Pending JP2015190829A (ja) | 2014-03-28 | 2014-03-28 | 流動体の降伏値を求める方法、そのプログラム及び装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2015190829A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018197900A1 (en) * | 2017-04-27 | 2018-11-01 | Hydramotion Limited | The measurement of properties of vibrated yield stress fluids |
| CN108827831A (zh) * | 2018-06-07 | 2018-11-16 | 深圳市鸿曙科技有限公司 | 振动式粘度仪及其液体粘度检测方法 |
| CN110361295A (zh) * | 2019-07-24 | 2019-10-22 | 东北石油大学 | 一种w/o型含蜡原油乳状液屈服点确定方法 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH01132931A (ja) * | 1987-11-18 | 1989-05-25 | Chichibu Cement Co Ltd | 粘度計による試料の物性解析方法 |
| JPH08128940A (ja) * | 1994-10-31 | 1996-05-21 | Kinugawa Rubber Ind Co Ltd | 電気粘性流体の粘性性状測定方法 |
| JP2000283907A (ja) * | 1999-03-30 | 2000-10-13 | A & D Co Ltd | 振動式粘度計 |
| US20080060423A1 (en) * | 2006-04-29 | 2008-03-13 | Wen-Chen Jau | Measurements of yield stress and plastic viscosity of cement-based materials via concrete rheometer |
-
2014
- 2014-03-28 JP JP2014067681A patent/JP2015190829A/ja active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH01132931A (ja) * | 1987-11-18 | 1989-05-25 | Chichibu Cement Co Ltd | 粘度計による試料の物性解析方法 |
| JPH08128940A (ja) * | 1994-10-31 | 1996-05-21 | Kinugawa Rubber Ind Co Ltd | 電気粘性流体の粘性性状測定方法 |
| JP2000283907A (ja) * | 1999-03-30 | 2000-10-13 | A & D Co Ltd | 振動式粘度計 |
| US20080060423A1 (en) * | 2006-04-29 | 2008-03-13 | Wen-Chen Jau | Measurements of yield stress and plastic viscosity of cement-based materials via concrete rheometer |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018197900A1 (en) * | 2017-04-27 | 2018-11-01 | Hydramotion Limited | The measurement of properties of vibrated yield stress fluids |
| CN110914663A (zh) * | 2017-04-27 | 2020-03-24 | 海德拉运动有限公司 | 振动的屈服应力流体的性质的测量 |
| JP2020522680A (ja) * | 2017-04-27 | 2020-07-30 | ハイドラモーション リミテッド | 振動された降伏応力流体の特性の測定 |
| JP2020522679A (ja) * | 2017-04-27 | 2020-07-30 | ハイドラモーション リミテッド | 流動降伏応力流体の特性の測定 |
| JP7244183B2 (ja) | 2017-04-27 | 2023-03-22 | ハイドラモーション リミテッド | 振動された降伏応力流体の特性の測定 |
| JP7244182B2 (ja) | 2017-04-27 | 2023-03-22 | ハイドラモーション リミテッド | 流動降伏応力流体の特性の測定 |
| CN110914663B (zh) * | 2017-04-27 | 2023-06-13 | 海德拉运动有限公司 | 振动的屈服应力流体的性质的测量 |
| CN108827831A (zh) * | 2018-06-07 | 2018-11-16 | 深圳市鸿曙科技有限公司 | 振动式粘度仪及其液体粘度检测方法 |
| CN110361295A (zh) * | 2019-07-24 | 2019-10-22 | 东北石油大学 | 一种w/o型含蜡原油乳状液屈服点确定方法 |
| CN110361295B (zh) * | 2019-07-24 | 2022-06-21 | 东北石油大学 | 一种w/o型含蜡原油乳状液屈服点确定方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN109477751B (zh) | 电子振动传感器 | |
| JPWO2014049698A1 (ja) | 流動体の物性測定方法及び装置 | |
| US5323638A (en) | Sensor apparatus | |
| CN107278267A (zh) | 振动传感器 | |
| JPH01132931A (ja) | 粘度計による試料の物性解析方法 | |
| JP5880733B2 (ja) | 超音波疲労試験機および超音波疲労試験方法 | |
| WO2013111608A1 (ja) | 粘弾性測定方法及び粘弾性測定装置 | |
| JP6016934B2 (ja) | 流動体のずり速度を求める方法、そのプログラム及び装置 | |
| CN110945342A (zh) | 用于测量粘度的设备 | |
| JP2015190829A (ja) | 流動体の降伏値を求める方法、そのプログラム及び装置 | |
| JP5355278B2 (ja) | 振動式密度計の校正パラメータ決定方法及び密度算出方法 | |
| JP3348162B2 (ja) | 液体の粘性測定法と粘弾性測定法並びに粘弾性測定装置 | |
| JP5674159B2 (ja) | 粘度の測定方法および粘度測定装置 | |
| JP2015132570A (ja) | 粘度測定装置及び粘度測定方法 | |
| JP6345193B2 (ja) | 流動体の物性を測定する方法及び装置 | |
| JP6169092B2 (ja) | 流動体に作用するずり速度の到達距離を評価する方法、そのプログラム及び装置 | |
| JP2010271234A (ja) | 浮遊液滴を用いた材料の表面張力測定方法 | |
| JP2534173B2 (ja) | 流動体の粘度測定方法及び測定装置 | |
| JP2006214842A (ja) | 液体物性値測定装置及び液体物性値測定方法 | |
| KR102011569B1 (ko) | 미소 부피 액체용 점성 측정 장치 및 방법 | |
| JPH0121452B2 (ja) | ||
| KR102840490B1 (ko) | 진동계 q를 계산하기 위한 방법 및 장치 | |
| Lucklum et al. | Principle of a non-contact liquid level sensor using electromagnetic-acoustic resonators | |
| JP7352329B2 (ja) | 粘弾性測定方法および粘弾性測定装置 | |
| CA3183098C (en) | Method and apparatus for calculating a vibratory meter q |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170303 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180221 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180228 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20180905 |