JP2015190832A - 建造物の垂直面診断走行装置 - Google Patents
建造物の垂直面診断走行装置 Download PDFInfo
- Publication number
- JP2015190832A JP2015190832A JP2014067742A JP2014067742A JP2015190832A JP 2015190832 A JP2015190832 A JP 2015190832A JP 2014067742 A JP2014067742 A JP 2014067742A JP 2014067742 A JP2014067742 A JP 2014067742A JP 2015190832 A JP2015190832 A JP 2015190832A
- Authority
- JP
- Japan
- Prior art keywords
- main body
- apparatus main
- vertical surface
- controller
- moving bodies
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images


Landscapes
- Investigating Or Analyzing Materials By The Use Of Ultrasonic Waves (AREA)
Abstract
【解決手段】 XYの2次元の方向に自走可能にした装置本体Aに、レール部材63を上記X方向に沿って設けるとともに、このレール部材には、当該レール部材に沿って移動可能にするとともに、建造物の垂直面の状況を検出する検査機構72を設け、上記装置本体A及び検査機構72の作動を制御するコントローラを備えている。そして、コントローラは、装置本体のY方向の移動及び移動量を制御する機能と、装置本体のX方向の移動及び移動量を制御する機能と、上記おける検査機構の移動量を制御する機能と、検査機構が検出した診断結果を記憶する機能とを備えている。
【選択図】 図1
Description
これら従来の装置は、例えば、建造物の屋上などからゴンドラを吊り下げ、このゴンドラに載った人が、壁面のタイルを一つひとつ診断するようにしている。
上記装置本体と上記X方向移動体とを相対移動させるためのX方向駆動機構を備えている。
第4の発明によれば、電磁ソレノイドという簡単な装置を用いて打音を検出できる。また、その打音と座標とを対応づけてコントローラに記憶させられるので、例えばタイルなどが浮いたりひび割れたり位置を確実に検出することができる。
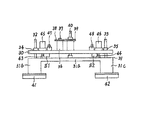
フレームを構成する上記Y軸レール1,2のそれぞれには、図1における上面の長手方向に沿って軌道溝5、6を形成し、この軌道溝5、6に図1及び図3に示すスライダー7,8を摺動自在に組み込んでいる。
したがって、駆動モータ10が回転することによって、伝達軸17も回転することになる。
したがって、上記のようにして伝達軸17が回転すれば、プーリー20,21が回転するとともに、プーリー20と22、21と23間に掛け渡された駆動ベルト24,25がY軸レール1,2に沿って平行に走行することになる。
さらに、この連結板26,27の先端は、図1からも明らかなように、Y軸レール1,2を乗り越えて駆動ベルト24,25方向に突出するとともに、その突出端にはベルト保持部材28,29を固定している。
また、上記連結板26,27には、Y方向移動体my1,my2を固定している。したがって、駆動ベルト24,25が上記のように走行すれば、このY方向移動体my1,my2がY軸レール1,2の外側に沿って相対移動することになる。
図2に示すように、基板30と吸盤保持部材31とを備え、これら基板30と吸盤保持部材31とは、それらの平面形状を図1に示すように長方形にしている。ただし、図1において、吸盤保持部材31は、基板30の下に完全に隠れているので図示されていないが、その平面形状は基板30と同一にしている。
そして、上記記板状部31aの長手方向両端側にはガイド軸32,33を起立させている。このガイド軸32,33は、基板30を貫通するとともに、基板30に固定した軸受34,35で、軸方向に移動可能に支持される。
さらに、上記ギア38にはギア39をかみ合わせるとともに、このギア38の回転軸40を、基板30を貫通して吸盤保持部材31の板状部31aに連係している。
さらに、上記基板30には、上記配管43,44に連通した真空破壊電磁弁47,48を設けている。そして、この真空破壊電磁弁47,48が開弁したときには、上記吸盤41,42内を大気に開放する。
さらに、上記X軸レール3であってプーリー52とは反対端側には、プーリー54を設けているが、このプーリー54もX軸レール3の上記上面に起立した軸55を中心に回転する。
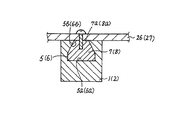
上記のようにした駆動ベルト56には、先に説明したベルト保持部材28,29と同様に、2枚の板で駆動ベルト56を挟持するベルト保持部材57を設けるとともに、このベルト保持部材57を連結板58に固定している。
したがって、駆動モータ51が駆動して、駆動ベルト56が走行すれば、連結板58がX軸レール3に沿って移動することになる。
なお、上記駆動モータ51及び駆動ベルト56は、X方向駆動機構を構成する。
また、図1には、上記X方向移動体mx1,mx2の吸盤保持部材が図示されていないが、上記X方向移動体mx1,mx2にも、Y方向移動体my1,my2の吸盤保持部材31と同じ吸盤保持部材が備わっていて、この吸盤保持部材に吸盤41,42が設けられている。このようにX方向移動体mx1,mx2の吸盤保持部材は図示されていないが、以下の説明においては、X方向移動体mx1,mx2にも吸盤保持部材が備わっていることを前提にしながら、Y方向移動体my1,my2の吸盤保持部材31と同一符号を用いて説明する。
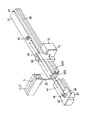
また、上記架け渡し部材61であって、固定片62を設けた側とは反対側にレール部材63を固定している。
一方、上記架け渡し部材61の一端には、支持プレート66を固定し、この支持プレート66であって、図5における裏面に駆動モータ67を固定している。そして、この駆動モータ67の回転軸68を上記支持プレート66から突出させるとともに、この回転軸68にプーリー69を固定している。
そして、この駆動ベルト70の一方の側を、上記移動部材65に固定している。したがって、駆動モータ67を駆動してプーリー69を回せば、駆動ベルト70が走行するとともに、それにともなって移動部材65がレール部材63に沿って移動する。
なお、この実施形態では、上記タイルを叩く叩打手段として電磁ソレノイドを用いたが、テコを利用したハンマーなどを用いてもよい。
また、上記検査機構として、カメラを併用してもよい。この場合には、上記叩打手段でタイルを叩くとともに、その叩いたタイルの部分の映像を取込むことになる。
なお、架け渡し部材61に固定した位置検出センサー73は、上記コ字状の開口側をレール部材63側に向けている。
そして、上記各位置検出センサー73は、コントローラに接続され、上記突片が位置検出センサー73内に進入したとき、コントローラは、叩打手段である電磁ソレノイドが、所定のタイル位置にあることを認識できるようにしている。
なお、 上記コントローラは、装置本体Aに搭載した駆動モータ、電動モータ,真空ポンプ及び検査機構のそれぞれを制御するために、無線もしくは有線を介して電気的に接続されている。
上記のようにタイルの状況を診断するときには、装置本体A以外の箇所、例えば地上に図示していないコントローラをあらかじめセットしておく。また、このコントローラには、次に説明する動作手順をあらかじめ記憶させておく。
なお、上記原点は、地上からやや離れた箇所に定めるようにするが、それは次の理由からである。例えば、地上に近いところは手作業あるいは目視等でタイルの状況を診断できる。したがって、手作業もしくは目視できない範囲を、当該走行装置を用いて診断する方が、作業効率が良いからである。
この状態で、Y方向移動体my1,my2及びX方向移動体mx1,mx2の電動モータ36を回転して、各吸盤41,42のすべてを外壁の上記タイル面に密着させるとともに、各真空ポンプ45,46を動作させて、吸盤41,42内を真空に保つ。
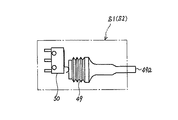
なお、上記のように各吸盤41,42内が真空に保たれているかどうかを、コントローラは、センサー機構S1,S2からの信号で判定する。すなわち、センサー機構S1,S2は、真空ポンプ45,46が動作して吸盤41,42内が真空にも保たれれば、伸縮体49が収縮してリミットスイッチ50をオフにするので、コントローラは、各センサー機構S1,S2のオフの信号によって、すべての吸盤41,42が吸着していることを判定できる。
このように検査機構72でタイルを叩くときには、コントローラは、すべての吸盤41,42をタイル面に吸着させて、装置本体Aをしっかりと固定しておく。
なお、上記のようにコントローラに記憶させた打音は、診断作業終了後に、人がコントローラから聞き取り、その打音が正常であるか、異常であるかを判定する。
コントローラは、装置本体AをY軸方向に移動させるときには、Y方向移動体my1,my2の吸盤41,42の吸着状態を維持しながら、X方向移動体mx1,mx2の真空破壊電磁弁47,48を開弁してその吸盤41,42の吸着力を開放するとともに、電動モータ36を回転させて、X方向移動体mx1,mx2の吸盤41,42をタイル面から離す。
なお、Y方向移動体my1,my2の吸盤41,42の吸着力が開放されたことを、コントローラは、センサー機構S1,S2の出力信号で判定する。
Y方向移動体my1,my2の吸盤41,42の吸着力を開放し、X方向移動体mx1,mx2の吸盤41,42をタイル面に吸着させた状態で、駆動ベルト24,25を走行させれば、今度は、装置本体Aが停止した状態を保って、Y方向移動体my1,my2がY軸方向にタイル一つ分移動する。このときにも、コントローラは、位置検出センサー75によってY方向移動体my1,my2の移動量を測り、所定量移動したときに、駆動モータ10を止めて、Y方向移動体my1,my2を停止させる。
なお、装置本体AをX軸方向に移動させるときの移動距離は、上記検査機構72の移動範囲を一単位として、その一単位分だけ移動させるようにするが、この一単位分の移動距離は、コントローラにあらかじめ記憶させている。
一方、Y方向移動体my1,my2の真空ポンプ45,46を停止するとともに、真空破壊電磁弁47,48を開弁して、その吸盤41,42の吸着力を開放する。これと同時に電動モータ36を回転させて、Y方向移動体my1,my2の吸盤41,42をタイル面から離す。
このように装置本体AとX方向移動体mx1,mx2とが相対移動を繰り返しながら、上記一単位分の移動を完了させる。
このように装置本体AがY軸方向にタイル一つ分だけ移動しては、検査機構72でX軸方向における複数のタイルを診断するとともに、Y軸方向の頂点に達したら装置本体AをX軸方向に一単位分移動させ、再び、当該装置本体AをY軸方向に移動させるという動作を繰り返して、壁面のタイルの状況を診断するものである。
また、上記検査機構72として、電磁ソレノイドとカメラとを併用したときには、これら打音や映像データは、上記座標とともに、コントローラに記憶される。
1,2 Y軸レール
3,4 X軸レール
10 駆動モータ
17 伝達軸
24,25 駆動ベルト
my1,my2 Y方向移動体
mx1,mx2 X方向移動体
63 レール部材
72 検査機構
Claims (4)
- XYの2次元の方向に自走可能にした装置本体に、レール部材を上記X方向に沿って設けるとともに、
このレール部材には、当該レール部材に沿って移動可能にするとともに、建造物の垂直面の状況を検出する検査機構を設け、
上記装置本体及び検査機構の作動を制御するコントローラを備え、
上記コントローラは、
装置本体のY方向の移動及び移動量を制御する機能と、
装置本体のX方向の移動及び移動量を制御する機能と、
上記おける検査機構の移動量を制御する機能と、
検査機構が検出した診断結果を記憶する機能とを備えた
建造物の垂直面診断走行装置。 - 上記コントローラは、
建造物の上記垂直面における所定の位置を原点として記憶する機能と、
上記原点から装置本体がY方向に移動し、検査機構がレール部材に沿ってX方向に移動したときの検査機構の座標を認識する機能と
を備えた請求項1に記載した建造物の垂直面診断走行装置。 - 上記装置本体は、
互いに対向する一対のY軸レールと、互いに対向する一対のX軸レールとを設け、
建造物の垂直面に吸着するとともに、上記一対のY軸レールに沿って装置本体と相対移動可能にした一対のY方向移動体を設け、
これら一対のY方向移動体は一体となって同一方向に移動する構成にし、
上記装置本体と上記Y方向移動体とを相対移動させるためのY方向駆動機構を備え、
建造物の垂直面に吸着するとともに、上記一対のX軸レールに沿って装置本体と相対移動可能にした一対のX方向移動体を設け、
これら一対のX方向移動体は一体となって同一方向に移動する構成にし、
上記装置本体と上記X方向移動体とを相対移動させるためのX方向駆動機構を備えた
請求項1又は2に記載した建造物の垂直面診断走行装置。 - 上記検査機構は、電磁ソレノイドと、この電磁ソレノイドの励磁あるいは非励磁に応じて上記垂直面を叩いたりあるいは垂直面から退避したりする叩打部材と、この叩打部材が叩いたときの打音を集音するマイクロホンとからなり、
コントローラは、
上記打音と上記座標とを対応づけて記憶する機能を備えた
請求項1〜3のいずれか1に記載した建造物の垂直面診断走行装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014067742A JP6410250B2 (ja) | 2014-03-28 | 2014-03-28 | 建造物の垂直面診断走行装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014067742A JP6410250B2 (ja) | 2014-03-28 | 2014-03-28 | 建造物の垂直面診断走行装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2015190832A true JP2015190832A (ja) | 2015-11-02 |
| JP6410250B2 JP6410250B2 (ja) | 2018-10-24 |
Family
ID=54425435
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014067742A Active JP6410250B2 (ja) | 2014-03-28 | 2014-03-28 | 建造物の垂直面診断走行装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6410250B2 (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107389795A (zh) * | 2017-09-05 | 2017-11-24 | 李亮 | 建筑墙体空鼓及隔音检测装置 |
| CN107796875A (zh) * | 2017-12-22 | 2018-03-13 | 国网福建省电力有限公司 | 可调式检查压力钢管脱空装置及其工作方法 |
| JP2020003240A (ja) * | 2018-06-26 | 2020-01-09 | 三菱重工業株式会社 | 検査対象物の検査装置及び検査方法 |
| CN115524400A (zh) * | 2022-09-26 | 2022-12-27 | 南京昶达新材料技术有限公司 | 用于列车车窗胶粘结构脱粘缺陷检测的扫查架及使用方法 |
| CN117630034A (zh) * | 2023-11-13 | 2024-03-01 | 湖南金航船舶制造有限公司 | 一种移动式集装箱船焊缝检测装置及方法 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS59131160A (ja) * | 1983-01-17 | 1984-07-27 | Jgc Corp | 超音波探傷装置 |
| JPS60206791A (ja) * | 1984-03-30 | 1985-10-18 | Mitsubishi Heavy Ind Ltd | 空間走査装置 |
| JPS60173066U (ja) * | 1984-04-26 | 1985-11-16 | 石川島播磨重工業株式会社 | 容器等の非破壊検査装置 |
| JPS61169761A (ja) * | 1985-01-22 | 1986-07-31 | Taisei Corp | 空隙探査器 |
| JPS62201357A (ja) * | 1986-02-28 | 1987-09-05 | Ishikawajima Harima Heavy Ind Co Ltd | 超音波探傷機等の走行装置 |
| JPH08178905A (ja) * | 1994-12-22 | 1996-07-12 | Tamagawa Seiki Co Ltd | 外壁診断方法 |
| JP2015189325A (ja) * | 2014-03-28 | 2015-11-02 | 株式会社小川優機製作所 | 垂直面走行装置 |
-
2014
- 2014-03-28 JP JP2014067742A patent/JP6410250B2/ja active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS59131160A (ja) * | 1983-01-17 | 1984-07-27 | Jgc Corp | 超音波探傷装置 |
| JPS60206791A (ja) * | 1984-03-30 | 1985-10-18 | Mitsubishi Heavy Ind Ltd | 空間走査装置 |
| JPS60173066U (ja) * | 1984-04-26 | 1985-11-16 | 石川島播磨重工業株式会社 | 容器等の非破壊検査装置 |
| JPS61169761A (ja) * | 1985-01-22 | 1986-07-31 | Taisei Corp | 空隙探査器 |
| JPS62201357A (ja) * | 1986-02-28 | 1987-09-05 | Ishikawajima Harima Heavy Ind Co Ltd | 超音波探傷機等の走行装置 |
| JPH08178905A (ja) * | 1994-12-22 | 1996-07-12 | Tamagawa Seiki Co Ltd | 外壁診断方法 |
| JP2015189325A (ja) * | 2014-03-28 | 2015-11-02 | 株式会社小川優機製作所 | 垂直面走行装置 |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107389795A (zh) * | 2017-09-05 | 2017-11-24 | 李亮 | 建筑墙体空鼓及隔音检测装置 |
| CN107796875A (zh) * | 2017-12-22 | 2018-03-13 | 国网福建省电力有限公司 | 可调式检查压力钢管脱空装置及其工作方法 |
| CN107796875B (zh) * | 2017-12-22 | 2023-10-31 | 国网福建省电力有限公司 | 可调式检查压力钢管脱空装置及其工作方法 |
| JP2020003240A (ja) * | 2018-06-26 | 2020-01-09 | 三菱重工業株式会社 | 検査対象物の検査装置及び検査方法 |
| US11579059B2 (en) | 2018-06-26 | 2023-02-14 | Mitsubishi Heavy Industries, Ltd. | Inspection apparatus and inspection method for inspection target |
| CN115524400A (zh) * | 2022-09-26 | 2022-12-27 | 南京昶达新材料技术有限公司 | 用于列车车窗胶粘结构脱粘缺陷检测的扫查架及使用方法 |
| CN117630034A (zh) * | 2023-11-13 | 2024-03-01 | 湖南金航船舶制造有限公司 | 一种移动式集装箱船焊缝检测装置及方法 |
| CN117630034B (zh) * | 2023-11-13 | 2024-05-24 | 湖南金航船舶制造有限公司 | 一种移动式集装箱船焊缝检测装置及方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6410250B2 (ja) | 2018-10-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6333014B2 (ja) | 垂直面走行装置 | |
| JP6410250B2 (ja) | 建造物の垂直面診断走行装置 | |
| JP2009052958A (ja) | 建物外壁点検装置及びシステム | |
| CN105651210B (zh) | 一种框架式机架平面度检测装置及检测方法 | |
| KR101074510B1 (ko) | 배전 선로 점검 로봇 | |
| BR112016012662B1 (pt) | sistema de inspeção e método de inspeção | |
| CN113358749A (zh) | 一种土木工程用混凝土结构强度检测装置及其检测方法 | |
| CN110514587B (zh) | 一种磁瓦表面缺陷检查系统及其检查方法 | |
| JP7141613B2 (ja) | 検査対象物の状態評価装置 | |
| EP2177887A3 (en) | Non-destructive test apparatus | |
| JP2016086039A5 (ja) | ||
| CN110230981A (zh) | 用于大尺寸件的尺寸检测系统及尺寸检测方法 | |
| KR102257984B1 (ko) | 다층 물품 검사용 엑스레이 검사 장치 및 그에 의한 검사 방법 | |
| CN119141218B (zh) | 一种门环自动拼接设备及控制方法 | |
| CN108393523A (zh) | 寻位机构及具有其的法兰加工设备 | |
| CN115901067A (zh) | 一种制动盘螺栓自动检测平台及检测方法 | |
| KR102170056B1 (ko) | 장대를 이용한 콘크리트 구조물 검사장치 | |
| CN203116709U (zh) | 一种用于检测货运x射线安全检查设备的测试装置 | |
| CN110320686A (zh) | Uled屏幕基板检测/测量设备的预对位装置及其使用方法 | |
| CN106546209B (zh) | 一种测量x射线机拍摄角度的装置及其方法 | |
| JP2011216788A5 (ja) | ||
| KR102108306B1 (ko) | 교각용 비파괴 검사장치 | |
| CN110411868B (zh) | 一种机械强度测试装置 | |
| CN220192149U (zh) | 一种烟支抽检复合机器人 | |
| CN118641644A (zh) | 负压与风机推压的混凝土裂缝检测机器人和检测方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20161121 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170927 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20171003 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20171130 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180320 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180328 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180821 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180919 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6410250 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: R3D03 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |