JP2016001055A - アクチュエータ及びリンク構造の駆動方法 - Google Patents
アクチュエータ及びリンク構造の駆動方法 Download PDFInfo
- Publication number
- JP2016001055A JP2016001055A JP2015022090A JP2015022090A JP2016001055A JP 2016001055 A JP2016001055 A JP 2016001055A JP 2015022090 A JP2015022090 A JP 2015022090A JP 2015022090 A JP2015022090 A JP 2015022090A JP 2016001055 A JP2016001055 A JP 2016001055A
- Authority
- JP
- Japan
- Prior art keywords
- auxiliary
- elastic body
- link structure
- link
- bearing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images












Landscapes
- Manipulator (AREA)
- Transmission Devices (AREA)
Abstract
【解決手段】本発明は、リンク固定部(6)と第1移動固定部(400a)とに跨る、紐状の第1弾性体(20a)と、リンク固定部(6)と第2移動固定部(400b)とに跨る、紐状の第2弾性体(20b)とを備える。第1弾性体と第2弾性体とは、互いの弾性力により引き延ばされた状態で保持される。リンク構造10は、第1移動固定部及び第2移動固定部の移動に応じて、第1弾性体の弾性力と第2弾性体の弾性力とが釣り合う位置に保持される。
【選択図】図15
Description
<構成>
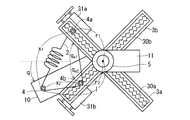
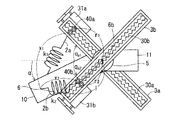
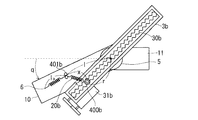
図1は、本実施形態に関するアクチュエータの全体構造を示す概略図である。図1に示されるように、アクチュエータは、リンク構造10と、弾性体2と、一対の補助部3a及び補助部3bと、回転部5とを備える。補助部3bは、リンク構造10を基準として補助部3aとは反対側に配置される。リンク構造10、補助部3a及び補助部3bは、それぞれ、回転部5から延び出て形成される。
次に、本実施形態に関するアクチュエータの動作について説明する。リンク構造10は、回転部5を中心に回転する。このとき、補助部3a及び補助部3bは、ある特定の角度をなして配置される。

以下に、本実施形態による効果を例示する。
<構成>
以下では、上記実施形態で説明した構成と同様の構成については同じ符号を付して図示し、その詳細な説明については適宜省略する。
次に、本実施形態に関するアクチュエータの動作について説明する。
以下に、本実施形態による効果を例示する。
<構成>
以下では、上記実施形態で説明した構成と同様の構成については同じ符号を付して図示し、その詳細な説明については適宜省略する。
次に、本実施形態に関するアクチュエータの動作について説明する。
次に、図15に示された構成を用いて、実験を行った結果を以下に示す。当該実験では、目標の平衡点と設定弾性値とが設定された状態で、本実施形態に関するアクチュエータにおける目標となるベアリングの位置を求め、同時にPフィードバック制御(比例制御)を行う。
図20は、正の弾性値の場合の実験結果を示す図である。図20において、縦軸が基準線(図15における点線)からのリンク構造10の開き角度[rad]であり、横軸が時間[s]である。図20の上段においては、平衡点1.04[rad]の場合の理想値が点線で示され、設定弾性値が0.1[Nm/rad]の場合の実際の測定値が実線で示され、設定弾性値が0.2[Nm/rad]の場合の実際の測定値を一点鎖線で示されている。また、図20の中段においては、平衡点0.52[rad]の場合の理想値が点線で示され、設定弾性値が0.1[Nm/rad]の場合の実際の測定値が実線で示され、設定弾性値が0.2[Nm/rad]の場合の実際の測定値を一点鎖線で示されている。また、図20の下段においては、設定弾性値が0.0[Nm/rad]の場合の実際の測定値が点線で示され、設定弾性値が0.1[Nm/rad]の場合の実際の測定値が実線で示され、設定弾性値が0.2[Nm/rad]の場合の実際の測定値を一点鎖線で示されている。図20の上段及び中段に示されるように、目標の平衡点π/6、π/3[rad]、設定弾性値0.1、0.2[Nm/rad]とした場合には、ベアリングの位置の収束性を確認することができる。また、図20の下段に示されるように、目標の平衡点0[rad]、設定弾性値0、0.1、0.2[Nm/rad]とした場合に、リンク先端から0.25[m]の箇所に外力1[N]以上2[N]以下を加えた場合の、ベアリングの位置変動の減衰を確認することができる。
図21は、負の弾性値の場合の実験結果を示す図である。図21において、縦軸が基準線(図15における点線)からのリンク構造10の開き角度[rad]であり、横軸が時間[s]である。図21の上段においては、設定弾性値が−0.1[Nm/rad]の場合の実際の測定値が実線で示され、設定弾性値が−0.2[Nm/rad]の場合の実際の測定値を一点鎖線で示されている。また、図21の中段においては、設定弾性値が−0.1[Nm/rad]の場合の実際の測定値が実線で示され、設定弾性値が−0.2[Nm/rad]の場合の実際の測定値を一点鎖線で示されている。また、図21の下段においては、設定弾性値が−0.1[Nm/rad]の場合の実際の測定値が実線で示され、設定弾性値が−0.2[Nm/rad]の場合の実際の測定値を一点鎖線で示されている。本実験では、目標の平衡点0、π/6、π/3[rad]、設定弾性値−0.1、−0.2[Nm/rad]とした場合に、リンク先端から0.25[m]の箇所に外力1[N]以上2[N]以下を加え、実際に弾性が負になっていることを確認する。本実験では、図21に示されるように、外力を与えた時点で大きな角度変化が生じている。
正の弾性値実験では、ベアリングの位置の、安定平衡点への収束が確認できる。また、負の弾性値実験では、ベアリングの位置の、不安定平衡点からの発散が確認できる。また、本実験の限りでは、静止摩擦の影響により、定常偏差が残っていることが分かる。
以下に、本実施形態による効果を例示する。
<構成>
以下では、上記実施形態で説明した構成と同様の構成については同じ符号を付して図示し、その詳細な説明については適宜省略する。
次に、本実施形態に関するアクチュエータの動作について説明する。
以下に、本実施形態による効果を例示する。
Claims (9)
- リンク構造を駆動させるアクチュエータであり、
第1補助部と、
前記リンク構造を基準として、前記第1補助部とは反対側に配置される第2補助部と、
前記リンク構造、前記第1補助部及び前記第2補助部と連結され、かつ、前記リンク構造、前記第1補助部及び前記第2補助部が回転運動する場合の回転中心である回転部とを備え、
前記リンク構造、前記第1補助部及び前記第2補助部は、それぞれ、前記回転部から延び出て形成され、
前記リンク構造は、前記回転部から延び出た位置において少なくとも1つのリンク固定部を備え、
前記第1補助部は、前記回転部から延び出た位置において、前記回転部から延び出る方向及びその逆方向に移動可能な第1移動固定部を備え、
前記第2補助部は、前記回転部から延び出た位置において、前記回転部から延び出る方向及びその逆方向に移動可能な第2移動固定部を備え、
前記リンク固定部と前記第1移動固定部とに跨る、紐状の第1弾性体と、
前記リンク固定部と前記第2移動固定部とに跨る、紐状の第2弾性体とをさらに備え、
前記第1弾性体と前記第2弾性体とは、互いの弾性力により引き延ばされた状態で保持され、
前記リンク構造は、前記第1移動固定部及び前記第2移動固定部の移動に応じて、前記第1弾性体の弾性力と前記第2弾性体の弾性力とが釣り合う位置に保持される、
アクチュエータ。 - 前記第1移動固定部及び前記第2移動固定部は、滑車構造であり、
前記第1補助部は、前記回転中心において第1中心固定部を備え、
前記第2補助部は、前記回転中心において第2中心固定部を備え、
前記第1弾性体は、前記リンク固定部と前記第1中心固定部との間で、前記第1移動固定部を介して取り付けられ、
前記第2弾性体は、前記リンク固定部と前記第2中心固定部との間で、前記第2移動固定部を介して取り付けられる、
請求項1に記載のアクチュエータ。 - 前記リンク固定部は、1つである、
請求項1に記載のアクチュエータ。 - 前記リンク固定部、前記第1移動固定部及び前記第2移動固定部は、滑車構造であり、
前記第1弾性体と前記第2弾性体とは、互いの端部が接続されることで、全体として輪形状の接続弾性体を形成し、
前記接続弾性体は、前記リンク固定部、前記第1移動固定部及び前記第2移動固定部の間で、引き延ばされた状態で保持され、
前記リンク構造は、前記第1移動固定部及び前記第2移動固定部の移動に応じて、前記接続弾性体の弾性力が釣り合う位置に保持される、
請求項3に記載のアクチュエータ。 - 前記第1移動固定部及び第2移動固定部は、ベアリングであり、
前記第1補助部は、ねじが切られた棒構造である第1滑りねじ部を備え、
前記第2補助部は、ねじが切られた棒構造である第2滑りねじ部を備え、
前記第1滑りねじ部は、前記第1補助部における前記回転部から延び出る方向に沿って配置され、かつ、前記第1移動固定部を嵌合させ、
前記第2滑りねじ部は、前記第2補助部における前記回転部から延び出る方向に沿って配置され、かつ、前記第2移動固定部を嵌合させる、
請求項1から請求項4のうちのいずれか1項に記載のアクチュエータ。 - 前記第1補助部は、前記第1滑りねじ部を回転させる第1駆動モータを備え、
前記第2補助部は、前記第2滑りねじ部を回転させる第2駆動モータを備える、
請求項5に記載のアクチュエータ。 - 前記リンク構造が、多関節ロボットのアーム部であり、
前記回転部が、前記多関節ロボットの関節部である、
請求項1から請求項6のうちのいずれか1項に記載のアクチュエータ。 - 前記リンク構造は、前記回転部から延び出た位置で、かつ、前記リンク固定部よりも前記回転部に近い位置において、滑車構造である第1経由構造及び滑車構造である第2経由構造をさらに備え、
前記第1弾性体は、前記リンク固定部と前記第1移動固定部との間で、前記第1経由構造を介して取り付けられ、
前記第2弾性体は、前記リンク固定部と前記第2移動固定部との間で、前記第2経由構造を介して取り付けられる、
請求項1から請求項3及び請求項5から請求項7のうちのいずれかに1項に記載のアクチュエータ。 - 回転中心を有するリンク構造を、前記回転中心から延び出た位置において異なる複数の方向から引っ張り、
前記リンク構造を引っ張る力の大きさ及び力の方向を制御することにより、前記リンク構造を回転運動させ、
前記リンク構造を引っ張る力の大きさが、いずれの方向においても0より大きい、
リンク構造の駆動方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015022090A JP6238920B2 (ja) | 2014-05-23 | 2015-02-06 | アクチュエータ及びリンク構造の駆動方法 |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014106993 | 2014-05-23 | ||
| JP2014106993 | 2014-05-23 | ||
| JP2015022090A JP6238920B2 (ja) | 2014-05-23 | 2015-02-06 | アクチュエータ及びリンク構造の駆動方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2016001055A true JP2016001055A (ja) | 2016-01-07 |
| JP6238920B2 JP6238920B2 (ja) | 2017-11-29 |
Family
ID=55076742
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015022090A Active JP6238920B2 (ja) | 2014-05-23 | 2015-02-06 | アクチュエータ及びリンク構造の駆動方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6238920B2 (ja) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03224916A (ja) * | 1990-01-30 | 1991-10-03 | Shin Caterpillar Mitsubishi Ltd | アーム部材の回動装置 |
| JP2007119249A (ja) * | 2005-09-30 | 2007-05-17 | Meidensha Corp | 荷重補償機構 |
| JP2012067809A (ja) * | 2010-09-21 | 2012-04-05 | Tokyo Institute Of Technology | 無段変速機 |
| JP2012161846A (ja) * | 2011-02-03 | 2012-08-30 | Keio Gijuku | 回動機構 |
-
2015
- 2015-02-06 JP JP2015022090A patent/JP6238920B2/ja active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03224916A (ja) * | 1990-01-30 | 1991-10-03 | Shin Caterpillar Mitsubishi Ltd | アーム部材の回動装置 |
| JP2007119249A (ja) * | 2005-09-30 | 2007-05-17 | Meidensha Corp | 荷重補償機構 |
| JP2012067809A (ja) * | 2010-09-21 | 2012-04-05 | Tokyo Institute Of Technology | 無段変速機 |
| JP2012161846A (ja) * | 2011-02-03 | 2012-08-30 | Keio Gijuku | 回動機構 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6238920B2 (ja) | 2017-11-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6556697B2 (ja) | 広い剛性範囲を有する可変剛性アクチュエータ | |
| JP6164615B2 (ja) | 可変負剛性アクチュエーション | |
| US20130345877A1 (en) | Robot and robot control method | |
| EP2999572B1 (en) | Compact parallel kinematics robot | |
| JP2011101938A (ja) | ロボットおよびその制御装置 | |
| Rakotondrabe et al. | Voltage/frequency proportional control of stick-slip micropositioning systems | |
| JP6238920B2 (ja) | アクチュエータ及びリンク構造の駆動方法 | |
| Spanjer et al. | Underactuated gripper that is able to convert from precision to power grasp by a variable transmission ratio | |
| JP2014046425A (ja) | 駆動装置 | |
| JP2017035769A (ja) | 4自由度機構 | |
| Maeda et al. | Position and compliance control of an artificial muscle manipulator using a mechanical equilibrium model | |
| JP4442464B2 (ja) | 多関節アーム機構 | |
| Tumari et al. | The direct strain feedback with PID control approach for a flexible manipulator: Experimental results | |
| Golubovic et al. | Adaptive control of piezoelectric walker actuator | |
| CN109773827A (zh) | 用于机械臂的负载估测重力补偿的方法及其系统 | |
| JP5780783B2 (ja) | 干渉力補償制御装置 | |
| Lendermann et al. | Comparison of passivity based impedance controllers without torque-feedback for variable stiffness actuators | |
| JP2021030340A (ja) | ロボットハンド | |
| JP7248307B2 (ja) | アドミタンス制御を適用した駆動ユニット | |
| JP2013526425A (ja) | ロボットアームまたはマニピュレータアームのヒンジにおける摩擦を同定する方法、および、その方法のトルク補償方法における使用 | |
| Contreras-Calderón et al. | Design of a variable stiffness joint for a five-bar-mechanism | |
| JP2017151590A (ja) | アクチュエータの駆動制御方法およびアクチュエータの駆動制御装置 | |
| US9726263B1 (en) | Variable transmission system | |
| Martens | Control of Pneumatic-muscle-actuator-driven Joints in Robotic Applications: Connecting Pneumatic Muscle Actuators with Robots Via a Torque Control Interface | |
| Sundareswari et al. | The Bidirectional Position control of the Prismatic joint for Motorized single link Robotic arm using Adaptive Super-Twisting Sliding Mode Control |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20161018 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20161018 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170627 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170704 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170808 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20171003 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20171031 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6238920 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |