JP2016002182A - 手動車両の電動化ユニット、手動車両の電動化ユニットの制御方法、電動車いす及び電動車いすの制御方法 - Google Patents
手動車両の電動化ユニット、手動車両の電動化ユニットの制御方法、電動車いす及び電動車いすの制御方法 Download PDFInfo
- Publication number
- JP2016002182A JP2016002182A JP2014123309A JP2014123309A JP2016002182A JP 2016002182 A JP2016002182 A JP 2016002182A JP 2014123309 A JP2014123309 A JP 2014123309A JP 2014123309 A JP2014123309 A JP 2014123309A JP 2016002182 A JP2016002182 A JP 2016002182A
- Authority
- JP
- Japan
- Prior art keywords
- wheel
- manual vehicle
- rear wheel
- unit
- drive
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000000034 method Methods 0.000 title claims abstract description 20
- 238000000926 separation method Methods 0.000 claims description 12
- 238000010586 diagram Methods 0.000 abstract description 3
- 230000007246 mechanism Effects 0.000 description 19
- 230000005484 gravity Effects 0.000 description 6
- 230000008859 change Effects 0.000 description 4
- 238000004364 calculation method Methods 0.000 description 3
- 238000013500 data storage Methods 0.000 description 3
- 230000008901 benefit Effects 0.000 description 2
- 239000003638 chemical reducing agent Substances 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 230000006870 function Effects 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000032683 aging Effects 0.000 description 1
- 238000005452 bending Methods 0.000 description 1
- 239000000470 constituent Substances 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 230000001141 propulsive effect Effects 0.000 description 1
- 238000005096 rolling process Methods 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 239000013598 vector Substances 0.000 description 1
- 238000003466 welding Methods 0.000 description 1
Images





Landscapes
- Automatic Cycles, And Cycles In General (AREA)
Abstract
【課題】段差の踏破が容易な手動車両の電動化ユニット、手動車両の電動化ユニットの制御方法、電動車いす及び電動車いすの制御方法を提供すること。【解決手段】手動車両の電動化ユニット2は、後輪13と、前輪14と、取付部211と、を有する手動車両(手動車いす1)の、取付部211に取り付け可能な本体部200と、本体部200に設けられ、後輪13よりも手動車両(手動車いす1)の後方に設けられた駆動輪21と、を備え、本体部200は、手動車両(手動車いす1)の直進方向における後輪13と駆動輪21との間の距離を変更して、駆動輪21の駆動力によって取付部211に力を加える。【選択図】図5
Description
本発明は、手動車両の電動化ユニット、手動車両の電動化ユニットの制御方法、電動車いす及び電動車いすの制御方法に関する。
昨今の高齢化社会への変化に伴い、移動支援装置の需要はますます増加すると予想されている。特に、電動車いすは、これまでのように障害者のみならず、高齢者もユーザーとして含まれてきており、そのニーズが拡大、多様化してきている。代表的なものとしてハンドル型電動車いす(いわゆるシニアカー)やジョイスティック型電動車いすなどが挙げられる。これらの電動車いすは、手動車いすに比べて小径の4つの車輪を有し、その内の2つの車輪を電気モータによる駆動輪としている。一般に電動車いすは、装置自体の重量が大きいため、自走以外の方法での運搬が容易ではない。
一方、電動で移動可能でありながら、比較的軽量で、運搬に便利である種類の車いすが最近注目され、その市場も拡大してきている。このような車いすは、手動車いすをベースとして、電動化ユニットを装着したタイプのもので、簡易電動車いすと呼ばれる(例えば、特許文献1〜特許文献5参照)。
簡易電動車いすの長所は、電動車いすとして設計、製造されたものより軽量・簡便であり、総合的に安価になる場合が多いことである。また、電動車いすのように座いすの下に大型の蓄電池を積んでおらず、モータも小型化されているので従来の手動車いす同様折りたたみが可能となっている。このため、車いすを自動車の屋根上に積載するシステムを用いることで、障害者自身でも楽に車いすを自動車に積み込むことが可能である。
簡易電動車いすは、大容量の蓄電池を搭載していないので、一充電あたりの移動距離は、電動車いすに比較して短い。しかしながら、手動車いすの構造を基本としていることから、電動での移動ができない場合には、手こぎによる移動が可能であるということも大きな特徴である。
市販されている簡易電動車いすの多くは、手動車いすの駆動輪(ハンドトリムのついた大径の車輪)をモータが付属する電動車輪ユニットに交換するものが主流である(例えば、非特許文献1、2参照)。このような簡易電動車いすは、両輪に取り付けられた2つの電気モータを制御する際、負荷の片寄りやモータ特性の微妙な差異が車いすの直進性などの挙動に影響するために、調整や制御などに潜在的な困難さを含んでいると考えられる。また、車輪径が大きいために、電動ユニットのモータは低速・高トルクに対応するために、大型化する傾向にある。
株式会社今仙技術研究所ホームページ、手動兼用型(車いす電動化ユニット)DP−45/60デイリーパル、[平成24年8月30日検索]、インターネット<URL:http://www.imasengiken.co.jp/emc/dailypal.html>
ヤマハ発動機株式会社ホームページ、車イス電動ユニットJWX−1、[平成24年8月30日検索]、インターネット<URL:http://www.yamaha−motor.jp/wheelchair/unit/jwx1/>
一般的に、車いすの前輪は後輪よりも直径が小さい。このため、段差を踏破するためには、大きな推進力を発生させて踏破したり、手動操作でウィリー動作を行ったりするなどの、難しい操作が要求されていた。
本発明は、以上のような技術的課題に鑑みてなされたものである。本発明のいくつかの態様によれば、段差の踏破が容易な手動車両の電動化ユニット、手動車両の電動化ユニットの制御方法、電動車いす及び電動車いすの制御方法を提供することができる。
本発明は前述の課題の少なくとも一部を解決するためになされたものであり、以下の態様又は適用例として実現することが可能である。
[適用例1]
本適用例に係る手動車両の電動化ユニットは、
後輪と、前輪と、取付部と、を有する手動車両の、前記取付部に取り付け可能な本体部と、
前記本体部に設けられ、前記後輪よりも前記手動車両の後方に設けられた駆動輪と、
を備え、
前記本体部は、
前記手動車両の直進方向における前記後輪と前記駆動輪との間の距離を変更して、前記駆動輪の駆動力によって前記取付部に力を加える、手動車両の電動化ユニットである。
本適用例に係る手動車両の電動化ユニットは、
後輪と、前輪と、取付部と、を有する手動車両の、前記取付部に取り付け可能な本体部と、
前記本体部に設けられ、前記後輪よりも前記手動車両の後方に設けられた駆動輪と、
を備え、
前記本体部は、
前記手動車両の直進方向における前記後輪と前記駆動輪との間の距離を変更して、前記駆動輪の駆動力によって前記取付部に力を加える、手動車両の電動化ユニットである。
本適用例によれば、手動車両の直進方向における後輪と駆動輪との距離を変更して、駆動輪の駆動力によって取付部に力を加えることで、後輪と床面との接点付近を回転軸とする回転運動が生じるので、前輪を持ち上げるウィリー動作が容易となる。また、重心を後方に移動させることができるので、後輪と駆動輪とで手動車両を安定して支持できる。したがって、段差の踏破が容易な手動車両の電動化ユニットを実現できる。
[適用例2]
上述の手動車両の電動化ユニットにおいて、
前記本体部は、アームを有し、
前記アームの一端側は前記取付部に接続され、他端側に前記駆動輪が設けられていてもよい。
上述の手動車両の電動化ユニットにおいて、
前記本体部は、アームを有し、
前記アームの一端側は前記取付部に接続され、他端側に前記駆動輪が設けられていてもよい。
本適用例によれば、駆動輪の駆動力によって取付部に力を加えることが容易となる。したがって、段差の踏破が容易な手動車両の電動化ユニットを実現できる。
[適用例3]
上述の手動車両の電動化ユニットにおいて、
前記取付部は、前記後輪の車軸よりも高い位置に設けられてもよい。
上述の手動車両の電動化ユニットにおいて、
前記取付部は、前記後輪の車軸よりも高い位置に設けられてもよい。
本適用例によれば、駆動輪の駆動力が小さい場合においても、駆動輪の駆動力によって取付部に力を加えることが容易となる。したがって、段差の踏破が容易な手動車両の電動化ユニットを実現できる。
[適用例4]
上述の手動車両の電動化ユニットにおいて、
前記後輪を制動させる制動部をさらに備え、
前記本体部は、前記制動部が前記後輪を制動させている状態で、前記後輪と前記駆動輪との距離を変更してもよい。
上述の手動車両の電動化ユニットにおいて、
前記後輪を制動させる制動部をさらに備え、
前記本体部は、前記制動部が前記後輪を制動させている状態で、前記後輪と前記駆動輪との距離を変更してもよい。
本適用例によれば、後輪を制動させることによって、駆動輪の駆動力によって取付部に力を加えることが容易となる。したがって、段差の踏破が容易な手動車両の電動化ユニットを実現できる。
[適用例5]
上述の手動車両の電動化ユニットにおいて、
前記駆動輪を前記本体部に接続する脚部を有し、
前記脚部は、前記本体部に対して旋回軸心の周りに回転可能に取り付けられ、
前記駆動輪は、前記旋回軸心に対して所定の離間距離を隔てて配置された駆動軸心を有し、前記脚部に対し該駆動軸心の周りに回転自在に取り付けられ、
前記駆動輪を前記脚部に対して回転させる第1の電気モータと、
前記脚部を前記本体部に対して回転させる第2の電気モータと、
前記手動車両の走行を操作する操作部と、
前記操作部の操作によって出力された信号に基づいて前記第1の電気モータと前記第2の電気モータとを駆動させる制御部と、
をさらに備え、
前記手動車両は、前記後輪として、同一回転軸心線上に配置された2つの車輪を少なくとも有し、
前記制御部は、電動化ユニットを前記手動車両に取り付けた際に、前記操作部から出力された信号を前記手動車両の直進速度Vの指令値及び旋回速度Ωの指令値として入力し、下記式(1)に基づいて前記駆動輪の前記駆動軸心における第1の角速度ωw及び前記脚部の前記旋回軸心における第2の角速度ωsを算出し、前記第1の角速度ωwを出力して前記第1の電気モータを駆動し、前記第2の角速度ωsを出力して前記第2の電気モータを駆動してもよい。
上述の手動車両の電動化ユニットにおいて、
前記駆動輪を前記本体部に接続する脚部を有し、
前記脚部は、前記本体部に対して旋回軸心の周りに回転可能に取り付けられ、
前記駆動輪は、前記旋回軸心に対して所定の離間距離を隔てて配置された駆動軸心を有し、前記脚部に対し該駆動軸心の周りに回転自在に取り付けられ、
前記駆動輪を前記脚部に対して回転させる第1の電気モータと、
前記脚部を前記本体部に対して回転させる第2の電気モータと、
前記手動車両の走行を操作する操作部と、
前記操作部の操作によって出力された信号に基づいて前記第1の電気モータと前記第2の電気モータとを駆動させる制御部と、
をさらに備え、
前記手動車両は、前記後輪として、同一回転軸心線上に配置された2つの車輪を少なくとも有し、
前記制御部は、電動化ユニットを前記手動車両に取り付けた際に、前記操作部から出力された信号を前記手動車両の直進速度Vの指令値及び旋回速度Ωの指令値として入力し、下記式(1)に基づいて前記駆動輪の前記駆動軸心における第1の角速度ωw及び前記脚部の前記旋回軸心における第2の角速度ωsを算出し、前記第1の角速度ωwを出力して前記第1の電気モータを駆動し、前記第2の角速度ωsを出力して前記第2の電気モータを駆動してもよい。
(ここで、rは前記駆動輪の半径、sは前記離間距離である。また、2つの前記車輪の回転軸心線をY軸、該Y軸上の2つの前記車輪間の中点を原点として該Y軸に垂直な仮想直線をX軸とした手動車両座標系を水平面内に設定したとき、φはX軸(前記手動車両の直進方向)に対する前記駆動輪の進行方向のなす角度、x、yは手動車両座標系における前記旋回軸心の位置であり、xは0でない。)
本適用例によれば、手動車両に全方向移動機構を含む電動化ユニットを組込むことによって、手動車両と同じ動作を電気モータによって生成することができる。そのため、従来の手動車両の利用者であっても、違和感なく本適用例に係る電動化ユニットが取り付けられた手動車両を電動で操作することができる。
[適用例6]
本適用例に係る手動車両の電動化ユニットの制御方法は、
後輪と、前輪と、取付部と、を有する手動車両の、前記取付部に取り付け可能な本体部と、
前記本体部に設けられ、前記後輪よりも前記手動車両の後方に設けられた駆動輪と、
を備えた電動化ユニットを前記手動車両に取り付けた際に、
前記後輪を制動させ、
前記手動車両の直進方向における前記後輪と前記駆動輪との間の距離を変更して、前記駆動輪の駆動力によって前記取付部に力を加える、手動車両の電動化ユニットの制御方法である。
本適用例に係る手動車両の電動化ユニットの制御方法は、
後輪と、前輪と、取付部と、を有する手動車両の、前記取付部に取り付け可能な本体部と、
前記本体部に設けられ、前記後輪よりも前記手動車両の後方に設けられた駆動輪と、
を備えた電動化ユニットを前記手動車両に取り付けた際に、
前記後輪を制動させ、
前記手動車両の直進方向における前記後輪と前記駆動輪との間の距離を変更して、前記駆動輪の駆動力によって前記取付部に力を加える、手動車両の電動化ユニットの制御方法である。
本適用例によれば、手動車両の直進方向における後輪と駆動輪との距離を変更して、駆動輪の駆動力によって取付部に力を加えることで、後輪と床面との接点付近を回転軸とする回転運動が生じるので、前輪を持ち上げるウィリー動作が容易となる。また、重心を後方に移動させることができるので、後輪と駆動輪とで手動車両を安定して支持できる。したがって、段差の踏破が容易な手動車両の電動化ユニットの制御方法を実現できる。
[適用例7]
本適用例に係る電動車いすは、
座部と、
前記座部を固定するフレームと、
前記フレームに設けられた後輪と、
前記フレームに設けられた前輪と、
前記フレームの取付部に一端側が接続されたアームと、
前記アームの他端側に接続され、前記後輪よりも後方に設けられた駆動輪と、
を備え、
前記アームは、
直進方向における前記後輪と前記駆動輪との間の距離を変更して、前記駆動輪の駆動力によって前記取付部に力を加える、電動車いすである。
本適用例に係る電動車いすは、
座部と、
前記座部を固定するフレームと、
前記フレームに設けられた後輪と、
前記フレームに設けられた前輪と、
前記フレームの取付部に一端側が接続されたアームと、
前記アームの他端側に接続され、前記後輪よりも後方に設けられた駆動輪と、
を備え、
前記アームは、
直進方向における前記後輪と前記駆動輪との間の距離を変更して、前記駆動輪の駆動力によって前記取付部に力を加える、電動車いすである。
本適用例によれば、電動車いすの直進方向における後輪と駆動輪との距離を変更して、駆動輪の駆動力によって取付部に力を加えることで、後輪と床面との接点付近を回転軸とする回転運動が生じるので、前輪を持ち上げるウィリー動作が容易となる。また、重心を後方に移動させることができるので、後輪と駆動輪とで電動車いすを安定して支持できる。したがって、段差の踏破が容易な電動車いすを実現できる。
[適用例8]
本適用例に係る電動車いすの制御方法は、
座部と、
前記座部を固定するフレームと、
前記フレームに設けられた後輪と、
前記フレームに設けられた前輪と、
前記フレームの取付部に一端側が接続されたアームと、
前記アームの他端側に接続され、前記後輪よりも後方に設けられた駆動輪と、
を備えた電動車いすに対して、
前記後輪を制動させ、
直進方向における前記後輪と前記駆動輪との間の距離を変更して、前記駆動輪の駆動力によって前記取付部に力を加える、電動車いすの制御方法である。
本適用例に係る電動車いすの制御方法は、
座部と、
前記座部を固定するフレームと、
前記フレームに設けられた後輪と、
前記フレームに設けられた前輪と、
前記フレームの取付部に一端側が接続されたアームと、
前記アームの他端側に接続され、前記後輪よりも後方に設けられた駆動輪と、
を備えた電動車いすに対して、
前記後輪を制動させ、
直進方向における前記後輪と前記駆動輪との間の距離を変更して、前記駆動輪の駆動力によって前記取付部に力を加える、電動車いすの制御方法である。
本適用例によれば、電動車いすの直進方向における後輪と駆動輪との距離を変更して、駆動輪の駆動力によって取付部に力を加えることで、後輪と床面との接点付近を回転軸とする回転運動が生じるので、前輪を持ち上げるウィリー動作が容易となる。また、重心を後方に移動させることができるので、後輪と駆動輪とで電動車いすを安定して支持できる。また、後輪を制動させることによって、電駆動輪の駆動力によって取付部に力を加えることが容易となる。したがって、段差の踏破が容易な電動車いすの制御方法を実現できる。
以下、本発明の好適な実施形態について図面を用いて詳細に説明する。用いる図面は説明の便宜上のものである。なお、以下に説明する実施形態は、特許請求の範囲に記載された本発明の内容を不当に限定するものではない。また以下で説明される構成の全てが本発明の必須構成要件であるとは限らない。
1.手動車両の電動化ユニット及び電動車いすの全体構成
図1は、本実施形態に係る電動車いす100の側面図である。図2は、本実施形態に係る電動車いす100を模式的に示す概略平面図である。図3は、電動化ユニット2を説明するためのブロック図である。
図1は、本実施形態に係る電動車いす100の側面図である。図2は、本実施形態に係る電動車いす100を模式的に示す概略平面図である。図3は、電動化ユニット2を説明するためのブロック図である。
以下では、手動車両として、手動車いすを例に取り説明する。手動車両としては、これに限らず、台車やショッピングカートなど、種々の公知の手動車両を採用できる。
図3及び図4に示すように、電動車いす100は、同一回転軸心線上に配置された2つの車輪を少なくとも有する手動車両の一例である手動車いす1と、手動車いす1に取り付けられた電動化ユニット2と、を含む。電動化ユニット2を市販の手動車いす1に取り付けていわゆる簡易電動車いすとすることができ、手動車いす1と電動化ユニット2をあらかじめ一体化した電動車いすとすることもできる。また、手動車いす1と電動化ユニット2との接続部分を容易に着脱可能な構造とすることもできる。
手動車いす1は、座部16aと、座部16aを固定するフレーム12と、座部16aを挟んでフレーム12に同一の回転軸心線P’上で回転自在に取り付けられた2つの手動用の後輪13と、を含む。より詳細には、手動車いす1は、折り畳み可能な手動車いすであり、左右両側にほぼ対称形状のフレーム12が配設されている。このフレーム12は金属製のパイプなどを折り曲げたり、溶接したりすることによって形成されている。このフレーム12は、車輪軸心Pを中心に手動用の後輪13を回動自在に支持する車輪支持フレー
ム12aと、座部16aを支持する座部支持フレーム12bと、を有する。車輪軸心Pは、同一の仮想線である回転軸心線P’上にある。フレーム12は、さらに座部支持フレーム12bの後端から上方に延びる肘掛け支持フレーム12cと、背もたれ部16bを支持する背もたれ部支持フレーム12dと、座部支持フレーム12bの下方でほぼ平行に配置された下部フレーム12eとを有する。座部支持フレーム12bはさらに前方下方へ延出されて、その下端部にステップ15を支持し、下部フレーム12eは前方下端部にキャスタとして構成されている前輪14が支持されている。前輪14の直径は後輪13の直径よりも小さく構成されている。なお、図1では説明のため、図の手前側の後輪13を省略して示している。また、ここでは省略しているが、手動用の後輪13には通常、車いす1を移動・操作するためのハンドトリムが設けられている。
ム12aと、座部16aを支持する座部支持フレーム12bと、を有する。車輪軸心Pは、同一の仮想線である回転軸心線P’上にある。フレーム12は、さらに座部支持フレーム12bの後端から上方に延びる肘掛け支持フレーム12cと、背もたれ部16bを支持する背もたれ部支持フレーム12dと、座部支持フレーム12bの下方でほぼ平行に配置された下部フレーム12eとを有する。座部支持フレーム12bはさらに前方下方へ延出されて、その下端部にステップ15を支持し、下部フレーム12eは前方下端部にキャスタとして構成されている前輪14が支持されている。前輪14の直径は後輪13の直径よりも小さく構成されている。なお、図1では説明のため、図の手前側の後輪13を省略して示している。また、ここでは省略しているが、手動用の後輪13には通常、車いす1を移動・操作するためのハンドトリムが設けられている。
手動車いす1は、車輪径が同じ2つの後輪13を同じ速度で同じ方向に回転させたとき、直進方向Tに前進又は後退することができる。通常、手動車いす1を含む手動車両の2つの後輪13は、車輪径が同じであって、車輪軸心Pにおいて進行方向に対して旋回しないが、左右の車輪を異なる回転数で回転させることで手動車いす1を旋回移動することができる。電動車いす100は、電動化ユニット2を装着することにより、手動車いす1単体のときと同じ動作を実現することができる。なお、車いすが他の手動車両である場合には、同様に車輪径が同じであって、車輪軸心Pにおいて進行方向に対して旋回しない2つの車輪を有することができる。
本実施形態に係る手動車両の電動化ユニット2は、後輪13と、前輪14と、取付部211と、を有する手動車両(手動車いす1)に取り付け可能な本体部200と、本体部200に設けられ、後輪13よりも手動車両(手動車いす1)の後方に設けられた駆動輪21と、を備えている。本体部200は、手動車両(手動車いす1)の直進方向Tにおける後輪13と駆動輪21との間の距離を変更して、駆動輪21の駆動力によって取付部211に力を加える。本体部200の動作については、「2.手動車両の電動化ユニット及び電動車いすの制御方法」の項で後述される。
本体部200は、アーム210、回動継手212、脚部213、フレーム220及び伸縮継手221を有している。
アーム210は、棒状に形成されている。アーム210の一端は、取付部211を介して肘掛け支持フレーム12cの上部に接続されている。本実施形態においては、取付部211は、回動継手として構成されている。本実施形態においては、取付部211は、後輪13の車軸よりも高い位置に設けられている。アーム210は、取付部211によって、手動車いす1の直進方向Tと鉛直方向とで規定される平面の法線方向(手動車いす1の直進方向T及び鉛直方向に対して垂直な方向)を回転軸として、回動自在に接続されている。アーム210の他端は、回動継手212を介してフレーム220の後方端部と接続されている。アーム210は、回動継手212によって、手動車いす1の直進方向Tと鉛直方向とで規定される平面の法線方向(手動車いす1の直進方向T及び鉛直方向に対して垂直な方向)を回転軸として、回動自在に接続されている。アーム210の他端側には、駆動輪21が設けられている。
フレーム220は、側面から見てL字状に形成され、図2に示すように電動車いす100の左右に一対設けられ、その上部に本体部200を架け渡して固定している。フレーム220は、手動車いす1の直進方向Tに所定の範囲内で伸縮する伸縮継手221を有している。なお、図2は、主な構成の配置を説明するためにフレーム12などの構成を省略して示している。
電動化ユニット2は、フレーム12にフレーム220を介して取り付けられた本体部2
00と、本体部200に対して旋回軸心Rの周りに回転可能な脚部213と、旋回軸心Rに対して所定の離間距離sを隔てて配置された駆動軸心Qを有し、脚部213に対し駆動軸心Qの周りに回転自在に配置された駆動輪21と、駆動輪21を脚部213に対して回転させる第1の電気モータ25と、脚部213を本体部200に対して回転させる第2の電気モータ32と、電動車いす100の走行を操作する操作部230と、操作部230の操作によって出力された信号に基づいて第1の電気モータ25と第2の電気モータ32とを駆動させる制御部240と、を有する。
00と、本体部200に対して旋回軸心Rの周りに回転可能な脚部213と、旋回軸心Rに対して所定の離間距離sを隔てて配置された駆動軸心Qを有し、脚部213に対し駆動軸心Qの周りに回転自在に配置された駆動輪21と、駆動輪21を脚部213に対して回転させる第1の電気モータ25と、脚部213を本体部200に対して回転させる第2の電気モータ32と、電動車いす100の走行を操作する操作部230と、操作部230の操作によって出力された信号に基づいて第1の電気モータ25と第2の電気モータ32とを駆動させる制御部240と、を有する。
本体部200には第1の電気モータ25と第2の電気モータ32とが配置され、本体部200の下部には脚部213と駆動輪21が配置されている。第1の電気モータ25で駆動輪21を駆動軸心Qのまわりに回転駆動し、第2の電気モータ32で旋回軸心Rのまわりに脚部213を回転することで、駆動輪21を操舵することができる全方向移動機構として機能する。なお、全方向移動機構の構成例の詳細は「3.全方向移動機構」の項で後述される。
操作部230は、肘掛け支持フレーム12cの先端に配置することができ、利用者が座部16aに腰かけた状態で操作することができる。操作部230は、操作者の操作によって、電動車いす100の移動方向と移動速度を決定するための信号を出力する。車いす100の2つの手動用の後輪13の回転軸心線P’をY軸、該Y軸上の2つの後輪13間の中点(後輪13のトレッドの中点)を原点Oとして該Y軸に垂直な仮想直線をX軸(すなわち車いす100の直進方向Tである)とした車いす座標系を水平面内に設定したとき、操作部230におけるXa方向とYa方向は車いす座標系のX軸とY軸に平行である。操作者は、操作部230の例えばXa方向への操作によって電動車いす100の直進速度Vの指令値とすることができ、Xa−Ya座標系における位置操作によって電動車いす100の旋回速度Ωの指令値とすることができる。なお、手動車いすが他の手動車両である場合には、車いす座標系は手動車両座標系として説明することができる。
操作部230は、電動車いす100の直進速度Vの指令値及び旋回速度Ωの指令値となる信号を制御部240に出力することができる公知の手段であるトラックボール、ホイール、ジョイスティックなどを採用することができ、特に、電動車いすに一般的に用いられるジョイスティックを採用することができる。ジョイスティックは、利用者の操作によるジョイスティックの傾き方向及び傾き度合い(角度)に応じて、それぞれ電動車いすの移動方向及び移動速度を決定することができる。例えば、ジョイスティックの前後方向(図2のXa方向)の傾斜は電動車いす100の直進速度Vの指令値とすることができ、ジョイスティックの左右方向(図2のYa方向)の傾斜は電動車いす100の旋回速度Ωの指令値とすることができる。
図3に示すように、制御部240は、CPU(中央処理装置)などにより成り、操作部230から出力された信号を電動車いす100の直進速度Vの指令値及び旋回速度Ωの指令値として入力する入力部と、「3.全方向移動機構」の項で後述される式(1)に基づいて駆動輪21の駆動軸心Qにおける第1の角速度ωw及び脚部213の旋回軸心Rにおける第2の角速度ωsを算出する計算部244と、第1の角速度ωwと第2の角速度ωsを第1の電気モータ25と第2の電気モータ32へ出力する出力部246と、を有する。
制御部240には、図示しないデータ記憶部を含むことができる。データ記憶部には、電動車いす100を移動させるための所定の駆動制御データとして、例えば、「3.全方向移動機構」の項で後述される式(1)の情報が保存され、計算部244の要求により読みだすことができる。データ記憶部としては、例えば、磁気ディスクの記録媒体、半導体記憶メモリなどを用いることができる。
電動化ユニット2は、後輪13を制動させる制動部250を備えている。制動部250は、後輪13に対するブレーキとして構成されている。制動部250は、制御部240によって制御されてもよいし、手動操作によって制御されてもよい。
2.手動車両の電動化ユニット及び電動車いすの制御方法
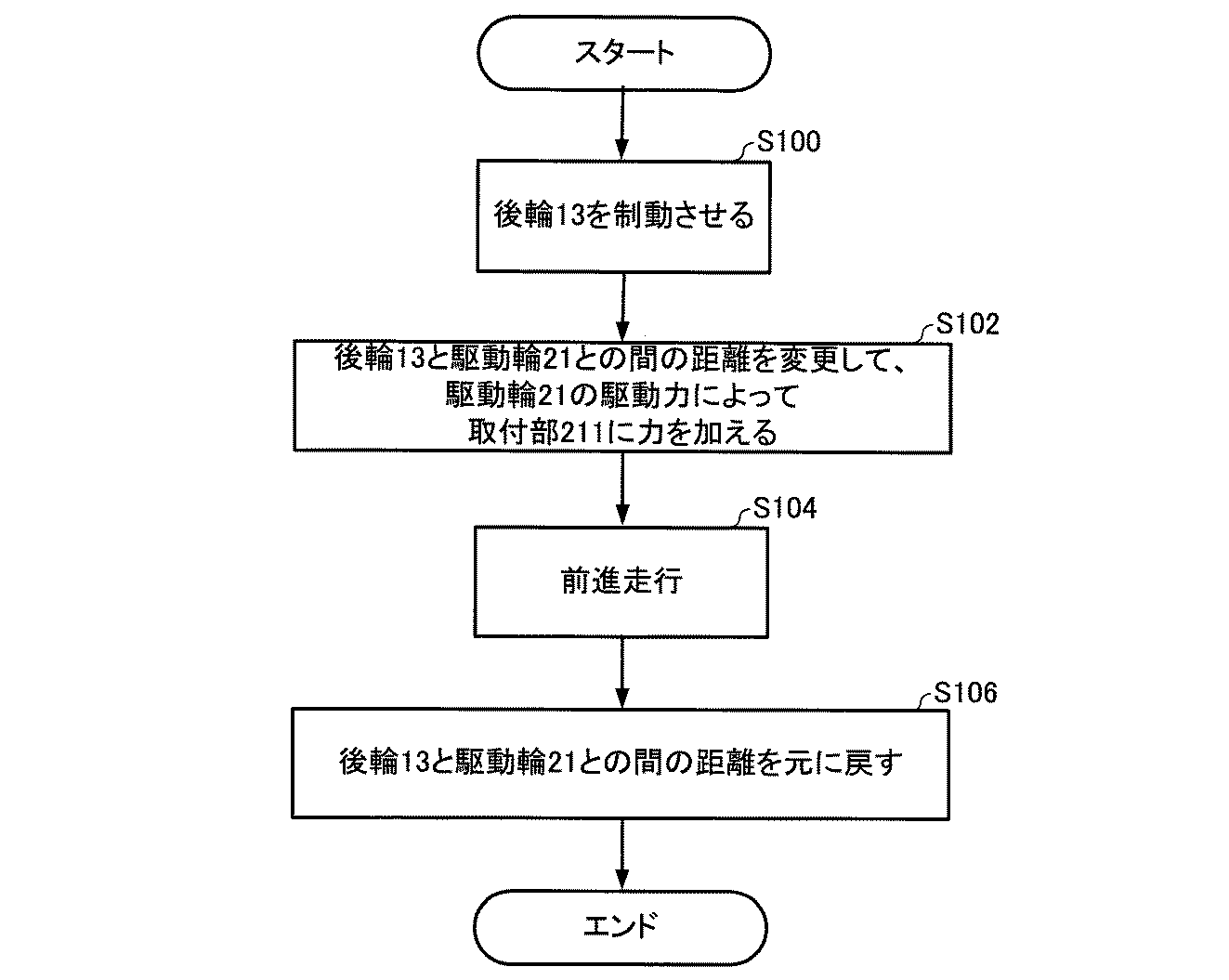
図4は、本実施形態に係る電動車いす100の動作例を示すフローチャートである。図5(A)〜図5(D)は、本実施形態に係る電動車いす100の動作例を示す模式図である。
図4は、本実施形態に係る電動車いす100の動作例を示すフローチャートである。図5(A)〜図5(D)は、本実施形態に係る電動車いす100の動作例を示す模式図である。
まず、電動車いす100は、段差の手前で後輪13を制動させる(ステップS100、図5(A))。本実施形態においては、制御部240からの制御信号に基づいて、制動部250が後輪13を制動させる。なお、図5の各図において、制動部250が後輪13を制動させている状態を白抜きの「×」で表している。
ステップS100の後に、電動車いす100は、後輪13と駆動輪21との間の距離を変更して、駆動輪21の駆動力によって取付部211に力を加える(ステップS102、図5(B))。より具体的には、制御部240からの制御信号に基づいて、第1の電気モータ25を駆動することによって、駆動輪21を後方に駆動する。これによって、アーム210を介して駆動輪21の駆動力に基づく力を取付部211に加えることができる。本実施形態においては、取付部211に加えられる力の向きは、水平よりも下方に向かう向きである。これによって、後輪13と床面との接点付近を回転軸とする回転運動が生じるので、電動車いす100は、前輪14を持ち上げる動作であるウィリー動作を行うことができる。また、重心を後方に移動させることができるので、後輪13と駆動輪21とで電動車いす100を安定して支持できる。
ステップS102の後に、電動車いす100は、前進走行を行う(ステップS104、図5(C))。より具体的には、制御部240からの制御信号に基づいて、制動部250による後輪13に対する制動を解除した後に、第1の電気モータ25を駆動することによって、駆動輪21を前方に駆動する。これによって、電動車いす100は、前輪14が段差の上段の上方となる位置まで移動する。
ステップS104の後に、後輪13と駆動輪21との間の距離を元に戻す(ステップS106、図5(D))。より具体的には、制御部240からの制御信号に基づいて、制動部250によって後輪13を制動した後に、第1の電気モータ25を駆動することによって、駆動輪21を前方に駆動する。これによって、電動車いす100は、ウィリー動作から通常動作へと戻る。
本実施形態に係る電動車いす100及び電動化ユニット2によれば、手動車両(手動車いす1)又は電動車いす100の直進方向Tにおける後輪13と駆動輪21との距離を変更して、駆動輪21の駆動力によって取付部211に力を加えることで、後輪13と床面との接点付近を回転軸とする回転運動が生じるので、前輪14を持ち上げるウィリー動作が容易となる。また、重心を後方に移動させることができるので、後輪13と駆動輪21とで手動車両(手動車いす1)又は電動車いす100を安定して支持できる。したがって、段差の踏破が容易な電動車いす100及び電動化ユニット2を実現できる。
また、本実施形態に係る電動車いす100及び電動化ユニット2によれば、アーム210の一端側は取付部211に接続され、他端側に駆動輪21が設けられている、駆動輪21の駆動力によって取付部211に力を加えることが容易となる。したがって、段差の踏破が容易な電動車いす100及び電動化ユニット2を実現できる。
また、本実施形態に係る電動車いす100及び電動化ユニット2によれば、取付部211は、後輪13の車軸よりも高い位置に設けられているので、駆動輪21の駆動力(第1の電気モータ25の駆動力)が小さい場合においても、駆動輪21の駆動力によって取付部211に力を加えることが容易となる。したがって、段差の踏破が容易な電動車いす100及び電動化ユニット2を実現できる。
また、本実施形態に係る電動車いす100及び電動化ユニット2によれば、制動部250が後輪13を制動させている状態で、後輪13と駆動輪21との距離を変更するので、駆動輪21の駆動力によって取付部211に力を加えることが容易となる。したがって、段差の踏破が容易な電動車いす100及び電動化ユニット2を実現できる。
3.全方向移動機構
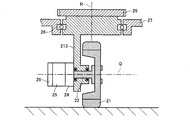
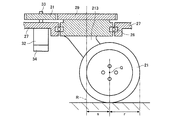
次に、本実施形態に用いることができる全方向移動機構(アクティブキャスタとも呼ばれる)の概要について説明する。なお、全方向移動機構は公知の構造を採用することができ、ここで説明する全方向移動機構はその一例に過ぎない。また、図1に示される構造とは若干相違するものの、原理や動作は同様である。図6は、電動化ユニット2に用いる全方向移動機構を模式的に示す縦断面図である。図7は、電動化ユニット2に用いる全方向移動機構を模式的に示す縦断面図である。ここで、図6は全方向移動機構の駆動輪21を正面(進行方向)からみた縦断面図であり、図7は全方向移動機構の駆動輪21を側面からみた縦断面図である。
次に、本実施形態に用いることができる全方向移動機構(アクティブキャスタとも呼ばれる)の概要について説明する。なお、全方向移動機構は公知の構造を採用することができ、ここで説明する全方向移動機構はその一例に過ぎない。また、図1に示される構造とは若干相違するものの、原理や動作は同様である。図6は、電動化ユニット2に用いる全方向移動機構を模式的に示す縦断面図である。図7は、電動化ユニット2に用いる全方向移動機構を模式的に示す縦断面図である。ここで、図6は全方向移動機構の駆動輪21を正面(進行方向)からみた縦断面図であり、図7は全方向移動機構の駆動輪21を側面からみた縦断面図である。
本実施形態で用いることができる全方向移動機構(アクティブキャスタ)は、受動的に動作するキャスタ(事務用いすに用いられるようなキャスタ)と同様な車輪配置であり、すなわち、旋回軸と車輪軸が交差しない車輪配置を有することができる。このような全方向移動機構は、例えば、キャスタの車輪軸と旋回軸(操舵軸)をそれぞれ独立したアクチュエータで駆動することで、移動体の駆動輪として用いることのできる車輪機構である。全方向移動機構は、車輪軸と操舵軸の回転を協調制御することで、水平面内のあらゆる方向への速度ベクトルを操舵軸中心に発生させることが可能である。よって、車輪の向きによらず、様々な方向に即座に移動ができることから、一輪であっても非常に柔軟な動きが生成できるという特徴がある。
駆動輪21は、操舵輪をかねており、駆動輪21を支持固定する車軸22により、操舵軸である駆動軸心Qの周りに脚部213に対し回転自在に支持されている。なお、駆動輪21には、空気圧式タイヤを装着することができる。車軸22は減速機24を介して、電気モータである第1の電気モータ25に接続されている。第1の電気モータ25の他端にはエンコーダ26が接続されて駆動輪21の回転角度が検出される。第1の電気モータ25を駆動することによって、駆動輪21は駆動軸心Qの周りに回転し、駆動輪21の転がり方向(図6であれば図の正面方向又は背面方向、図7であれば図の左右方向)に本体部200を移動することができる。
また、脚部213は、その上端が、本体部200に軸受け28を介して鉛直方向に延びる旋回軸心Rの周りに回動自在にして支持されている。ここで軸受け28の中心、すなわち脚部213の旋回軸心Rは、駆動輪21の接地位置から水平方向に所定の離間距離sだけオフセットされた位置とされている。この離間距離sは、旋回軸心Rと駆動軸心Qとの離間距離sである。より詳細には、離間距離sは、駆動軸心Qを含む接地面から鉛直方向に延びる仮想平面と旋回軸心Rとの最短距離である。例えば、図1に示すように、旋回軸心Rを下方に延伸する仮想の旋回軸心線は駆動輪21の幅の中心を通る位置に設定することができる。これは、上方から見た場合に、駆動輪21の幅の中心線の延長線上に旋回軸心Rが重なることを示す。
脚部213の上面には旋回軸心Rと同軸上に歯車29が取付けられて、本体部200に支持されている歯車31と噛合接続される。歯車31は、電気モータである第2の電気モータ32の出力軸33に支持固定されている。第2の電気モータ32の他端にはエンコーダ34が接続されて脚部213の回転角度すなわち操舵角度が検出される。第2の電気モータ32を駆動することによって、脚部213が旋回軸心Rを中心に回転し、旋回軸心Rと離間距離sだけオフセットされた位置にある駆動輪21を、離間距離sを半径とする円弧上に旋回させることができる。
このように、第1の電気モータ25で駆動輪21を回転駆動するとともに第2の電気モータ32で操舵することで、本体部200は前後、左右及び旋回が可能であり、この全方向移動機構だけであれば全方向に瞬時に方向転換して移動することが可能である。
このような全方向移動機構を用いる場合の、制御部240の動作について説明する。制御部240の計算部244は、操作部230から出力された信号を電動車いす100の直進速度Vの指令値及び旋回速度Ωの指令値と下記式(1)とに基づいて、駆動軸心Qにおける第1の角速度ωw及び脚部213の旋回軸心Rにおける第2の角速度ωsを算出する。
ここで、rは駆動輪21の半径、sは旋回軸心Rと駆動軸心Qとの離間距離である。より詳細には、離間距離sは、駆動軸心Qを含み接地面から鉛直方向に延びる仮想平面と旋回軸心Rとの最短距離である。また、2つの手動用の後輪13の回転軸心線P’をY軸、該Y軸上の2つの後輪13間の中点を原点Oとして該Y軸に垂直な仮想直線をX軸とした車いす座標系を水平面内に設定したとき、φはX軸(電動車いす100の直進方向T)に対する駆動輪21の進行方向のなす角度、x、yは車いす座標系における旋回軸心Rの位置であり、xは0でない。
制御部240から出力された第1の角速度ωwの指令値によって第1の電気モータ25を駆動して駆動輪21を駆動軸心Qの周りに第1の角速度ωwで回転し、かつ、制御部240から出力された第2の角速度ωsの指令値によって第2の電気モータ32を駆動して脚部213を本体部200(すなわち車いす100)に対して旋回軸心Rの周りに第2の角速度ωsで回転する。その結果、車いす100は、操作者の意図した直進速度Vと旋回速度Ωで移動することができる。
以上、本実施形態あるいは変形例について説明したが、本発明はこれら本実施形態あるいは変形例に限られるものではなく、その要旨を逸脱しない範囲において種々の態様で実施することが可能である。
本発明は、実施形態で説明した構成と実質的に同一の構成(例えば、機能、方法及び結果が同一の構成、あるいは目的及び効果が同一の構成)を含む。また、本発明は、実施形態で説明した構成の本質的でない部分を置き換えた構成を含む。また、本発明は、実施形態で説明した構成と同一の作用効果を奏する構成又は同一の目的を達成することができる
構成を含む。また、本発明は、実施形態で説明した構成に公知技術を付加した構成を含む。
構成を含む。また、本発明は、実施形態で説明した構成に公知技術を付加した構成を含む。
1…手動車いす、2…電動化ユニット、12…フレーム、12a…車輪支持フレーム、12b…座部支持フレーム、12c…肘掛け支持フレーム、12d…背もたれ部支持フレーム、12e…下部フレーム、13…後輪、14…前輪、16a…座部、16b…背もたれ部、21…駆動輪、22…車軸、24…減速機、25…第1の電気モータ、26…エンコーダ、27…本体部、28…軸受け、29…歯車、31…歯車、32…第2の電気モータ、34…エンコーダ、100…電動車いす、200…本体部、210…アーム、211,212…回動継手、213…脚部、220…フレーム、221…伸縮継手、230…操作部、240…制御部、242…入力部、244…計算部、246…出力部、250…制動部、O…原点、P…車輪軸心、P’…回転軸心線、Q…駆動軸心、R…旋回軸心、r…離間距離、s…半径、T…直進方向、φ…X軸に対する駆動輪の角度、ωw…第1の角速度、ωs…第2の角速度、V…直進速度、Ω…旋回速度
Claims (8)
- 後輪と、前輪と、取付部と、を有する手動車両の、前記取付部に取り付け可能な本体部と、
前記本体部に設けられ、前記後輪よりも前記手動車両の後方に設けられた駆動輪と、
を備え、
前記本体部は、
前記手動車両の直進方向における前記後輪と前記駆動輪との間の距離を変更して、前記駆動輪の駆動力によって前記取付部に力を加える、手動車両の電動化ユニット。 - 請求項1に記載の手動車両の電動化ユニットにおいて、
前記本体部は、アームを有し、
前記アームの一端側は前記取付部に接続され、他端側に前記駆動輪が設けられている、手動車両の電動化ユニット。 - 請求項1又は2に記載の手動車両の電動化ユニットにおいて、
前記取付部は、前記後輪の車軸よりも高い位置に設けられる、手動車両の電動化ユニット。 - 請求項1ないし3のいずれか1項に記載の手動車両の電動化ユニットにおいて、
前記後輪を制動させる制動部をさらに備え、
前記本体部は、前記制動部が前記後輪を制動させている状態で、前記後輪と前記駆動輪との距離を変更する、手動車両の電動化ユニット。 - 請求項1ないし4のいずれか1項に記載の手動車両の電動化ユニットにおいて、
前記駆動輪を前記本体部に接続する脚部を有し、
前記脚部は、前記本体部に対して旋回軸心の周りに回転可能に取り付けられ、
前記駆動輪は、前記旋回軸心に対して所定の離間距離を隔てて配置された駆動軸心を有し、前記脚部に対し該駆動軸心の周りに回転自在に取り付けられ、
前記駆動輪を前記脚部に対して回転させる第1の電気モータと、
前記脚部を前記本体部に対して回転させる第2の電気モータと、
前記手動車両の走行を操作する操作部と、
前記操作部の操作によって出力された信号に基づいて前記第1の電気モータと前記第2の電気モータとを駆動させる制御部と、
をさらに備え、
前記手動車両は、前記後輪として、同一回転軸心線上に配置された2つの車輪を少なくとも有し、
前記制御部は、電動化ユニットを前記手動車両に取り付けた際に、前記操作部から出力された信号を前記手動車両の直進速度Vの指令値及び旋回速度Ωの指令値として入力し、下記式(1)に基づいて前記駆動輪の前記駆動軸心における第1の角速度ωw及び前記脚部の前記旋回軸心における第2の角速度ωsを算出し、前記第1の角速度ωwを出力して前記第1の電気モータを駆動し、前記第2の角速度ωsを出力して前記第2の電気モータを駆動する、手動車両の電動化ユニット。
- 後輪と、前輪と、取付部と、を有する手動車両の、前記取付部に取り付け可能な本体部と、
前記本体部に設けられ、前記後輪よりも前記手動車両の後方に設けられた駆動輪と、
を備えた電動化ユニットを前記手動車両に取り付けた際に、
前記後輪を制動させ、
前記手動車両の直進方向における前記後輪と前記駆動輪との間の距離を変更して、前記駆動輪の駆動力によって前記取付部に力を加える、手動車両の電動化ユニットの制御方法。 - 座部と、
前記座部を固定するフレームと、
前記フレームに設けられた後輪と、
前記フレームに設けられた前輪と、
前記フレームの取付部に一端側が接続されたアームと、
前記アームの他端側に接続され、前記後輪よりも後方に設けられた駆動輪と、
を備え、
前記アームは、
直進方向における前記後輪と前記駆動輪との間の距離を変更して、前記駆動輪の駆動力によって前記取付部に力を加える、電動車いす。 - 座部と、
前記座部を固定するフレームと、
前記フレームに設けられた後輪と、
前記フレームに設けられた前輪と、
前記フレームの取付部に一端側が接続されたアームと、
前記アームの他端側に接続され、前記後輪よりも後方に設けられた駆動輪と、
を備えた電動車いすに対して、
前記後輪を制動させ、
直進方向における前記後輪と前記駆動輪との間の距離を変更して、前記駆動輪の駆動力によって前記取付部に力を加える、電動車いすの制御方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014123309A JP2016002182A (ja) | 2014-06-16 | 2014-06-16 | 手動車両の電動化ユニット、手動車両の電動化ユニットの制御方法、電動車いす及び電動車いすの制御方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014123309A JP2016002182A (ja) | 2014-06-16 | 2014-06-16 | 手動車両の電動化ユニット、手動車両の電動化ユニットの制御方法、電動車いす及び電動車いすの制御方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2016002182A true JP2016002182A (ja) | 2016-01-12 |
Family
ID=55221981
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014123309A Pending JP2016002182A (ja) | 2014-06-16 | 2014-06-16 | 手動車両の電動化ユニット、手動車両の電動化ユニットの制御方法、電動車いす及び電動車いすの制御方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2016002182A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110179604A (zh) * | 2019-06-15 | 2019-08-30 | 大连亿斯德环境科技有限公司 | 一种智能轮椅用全方位转向驱动轮及控制系统 |
| US10905607B2 (en) | 2019-01-29 | 2021-02-02 | Toyota Motor North America, Inc. | Modular power base arrangement |
-
2014
- 2014-06-16 JP JP2014123309A patent/JP2016002182A/ja active Pending
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10905607B2 (en) | 2019-01-29 | 2021-02-02 | Toyota Motor North America, Inc. | Modular power base arrangement |
| CN110179604A (zh) * | 2019-06-15 | 2019-08-30 | 大连亿斯德环境科技有限公司 | 一种智能轮椅用全方位转向驱动轮及控制系统 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5849363B2 (ja) | 車両 | |
| JP4868243B2 (ja) | 三輪走行装置 | |
| JP6003712B2 (ja) | キャスター式の後輪を備えた小型移動体 | |
| JP7269551B2 (ja) | 電動車両 | |
| JP4734666B2 (ja) | 3輪型乗用移動台車 | |
| WO2016139869A1 (ja) | 電動車 | |
| WO2022059116A1 (ja) | 二輪車 | |
| JP7320192B2 (ja) | 電動車両 | |
| JP4894589B2 (ja) | 車両 | |
| US20240261161A1 (en) | Electric wheelchair | |
| JP2016002182A (ja) | 手動車両の電動化ユニット、手動車両の電動化ユニットの制御方法、電動車いす及び電動車いすの制御方法 | |
| JP2009101898A (ja) | 倒立車輪型移動体、及びその制御方法 | |
| JP3501044B2 (ja) | 全方向移動台車 | |
| JP2012076670A (ja) | 乗用車両 | |
| WO2018180754A1 (ja) | 車両 | |
| JP6253079B2 (ja) | 手動車両の電動化ユニット及び手動車両の電動化ユニットの制御方法並びに電動車いす及び電動車いすの制御方法 | |
| JP2015180417A (ja) | 車椅子 | |
| RU2753257C1 (ru) | Защищенное от неумелого обращения одноколесное транспортное средство | |
| JP5846832B2 (ja) | 車椅子 | |
| JP4844194B2 (ja) | 車両 | |
| JP2013009849A (ja) | 車椅子に備える姿勢制御機構 | |
| JP2014073317A (ja) | 電動モビリティ | |
| JP6916052B2 (ja) | 電動車両 | |
| KR101856249B1 (ko) | 1인승 4륜 컴팩트카 | |
| JP2001180500A (ja) | 電動車両の操作装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170607 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180323 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180328 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20181003 |