JP2016100043A - 操作装置 - Google Patents
操作装置 Download PDFInfo
- Publication number
- JP2016100043A JP2016100043A JP2014233198A JP2014233198A JP2016100043A JP 2016100043 A JP2016100043 A JP 2016100043A JP 2014233198 A JP2014233198 A JP 2014233198A JP 2014233198 A JP2014233198 A JP 2014233198A JP 2016100043 A JP2016100043 A JP 2016100043A
- Authority
- JP
- Japan
- Prior art keywords
- magnetic
- switching
- magnet member
- rotation
- magnetic detection
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images



















Landscapes
- Switch Cases, Indication, And Locking (AREA)
- Rotary Switch, Piano Key Switch, And Lever Switch (AREA)
- Slide Switches (AREA)
- Switches That Are Operated By Magnetic Or Electric Fields (AREA)
Abstract
【課題】スペース的な制約を受けることなく、筐体外部での切替え操作により筐体内部での非接触による多点切替えを簡単な構造で実現可能とする。【解決手段】操作装置30Aの操作部材32は防水筐体ケース20の外側に配置され、磁石部材36を複数の切替位置に移動する。磁気検出部28は、防水筐体ケース20の内部に配置され、操作部材32により移動する磁石部材36の磁気の強さに応じた磁気検出信号を出力する。制御部は、磁気検出部28から出力する磁気検出信号に基づいて操作部材32の切替位置を示す切替信号を電気回路に出力して切替制御する。【選択図】図4
Description
本発明は、防水筐体に収納された電気回路の多点切替えを外部から非接触で行う防水型機器の操作装置に関する。
従来、防水型の機器である例えば無線式の防水型感知器にあっては、防水筐体の内部に収納した通信部に対する周波数チャンネルの選択を含む各種の設定操作を行う必要がある。このような設定操作を直接操作するスイッチなどで行うと、スイッチの操作部に防水構造を必要とし、構造が複雑化し、また完全に密閉した構造とすることも困難である。
この問題を解決するため本願発明者にあっては、防水筐体の内部に収納した電気回路に対する各種の設定を非接触型の設定部材を用いて行う操作装置を提案している。
従来の操作装置は、非接触型の設定部材として例えば磁石部材を使用し、防水筐体の裏面側に開口して磁石部材を挿入する盲穴として設定穴を設けると共に、設定穴に対応した防水筐体の内部に磁気検出素子を配置し、設定穴に対する磁石部材の有無を検出して例えば通信部のチャンネル周波数等のパラメータの設定を行うようにしている。
しかしながら、このような従来の防災型機器の操作装置にあっては、筐体裏面側に設けた設定穴に対する磁石部材の有無を筐体内に配置した磁気検出素子で検出して電気回路に対する各種の設定を行っているが、感知器裏面側に設けることのできる設定穴の数には限界があるため、電気回路に対し設定できるパラメータの数が制約される問題がある。
例えば無線式の防水型感知器で使用している400MHz帯の特定小電力無線局標準規格では、使用可能なチャンネル周波数は48チャンネルあるが、その中の一部しか選択することができず、選択可能なチャンネル周波数が少ないという問題がある。
本発明は、スペース的な制約を受けることなく、筐体外部での切替え操作により筐体内部での非接触による多点切替えを簡単な構造で実現可能とする防水型機器の操作装置を提供することを目的とする。
(操作装置)
本発明は、筐体の内部に電気回路を配置した機器に設ける操作装置に於いて、
筐体の外側に配置され、磁石部材を複数の切替位置に移動する操作部材と、
筐体の内部に配置され、操作部材により移動する磁石部材の磁気の強さに応じた磁気検出信号を出力する磁気検出部と、
磁気検出部から出力する磁気検出信号に基づいて操作部材の切替位置を示す切替信号を電気回路に出力する制御部と、
を備えたことを特徴とする。
本発明は、筐体の内部に電気回路を配置した機器に設ける操作装置に於いて、
筐体の外側に配置され、磁石部材を複数の切替位置に移動する操作部材と、
筐体の内部に配置され、操作部材により移動する磁石部材の磁気の強さに応じた磁気検出信号を出力する磁気検出部と、
磁気検出部から出力する磁気検出信号に基づいて操作部材の切替位置を示す切替信号を電気回路に出力する制御部と、
を備えたことを特徴とする。
(切替位置の表示)
制御部は、切替信号に基づいて電気回路を制御した場合に、操作部材による切替内容を表示部に表示させる。
制御部は、切替信号に基づいて電気回路を制御した場合に、操作部材による切替内容を表示部に表示させる。
(磁気検出信号の極性とレベルによる切替位置)
磁気検出部は、磁石部材の磁気の方向に応じた極性と磁気の強さに応じたレベルの磁気検出信号を出力し、
制御部は、磁気検出信号の極性とレベルに基づいて操作部材の切替位置を示す切替信号を出力する。
磁気検出部は、磁石部材の磁気の方向に応じた極性と磁気の強さに応じたレベルの磁気検出信号を出力し、
制御部は、磁気検出信号の極性とレベルに基づいて操作部材の切替位置を示す切替信号を出力する。
(切替位置決め機構)
操作部材は、複数の切替位置に移動した場合に切替位置を保持する位置決め機構を備える。
操作部材は、複数の切替位置に移動した場合に切替位置を保持する位置決め機構を備える。
(回転切替操作)
操作部材は磁石部材を回転して複数の切替え位置に移動する。
操作部材は磁石部材を回転して複数の切替え位置に移動する。
(磁石部材の回転による切替位置の検出)
磁石部材は棒状であり、両端の操作部材は、磁石部材の磁極面を通る磁力線に直交する回転軸により回転自在に配置し、
磁気検出部は、磁石部材の回転面上の磁極面回転位置の外側の所定位置に配置し、
制御部は、磁石部材の一方の磁極面が前記磁気検出部に相対した初期位置から磁石部材の他方の磁極面が磁気検出部に相対するまでの180°の回転範囲に設定した所定角度ごとの複数の切替位置を示す切替信号を前記電気回路に出力して制御する。
磁石部材は棒状であり、両端の操作部材は、磁石部材の磁極面を通る磁力線に直交する回転軸により回転自在に配置し、
磁気検出部は、磁石部材の回転面上の磁極面回転位置の外側の所定位置に配置し、
制御部は、磁石部材の一方の磁極面が前記磁気検出部に相対した初期位置から磁石部材の他方の磁極面が磁気検出部に相対するまでの180°の回転範囲に設定した所定角度ごとの複数の切替位置を示す切替信号を前記電気回路に出力して制御する。
(磁石部材と磁性体の回転による切替位置の検出)
磁石部材は棒状であり、操作部材は、磁石部材の両端の磁極面を通る磁力線に直交する回転軸により回転自在に配置すると共に、回転軸による磁石部材の回転面上の両端の磁極面を通る磁力線に直交する所定位置に磁石部材と一体に回転する磁性体を配置し、
磁気検出部は、磁石部材の回転面上の磁極面回転位置の外側の所定位置に配置し、
制御部は、磁石部材の一方の磁極面が前記磁気検出部に相対した初期位置から他方の磁極面が前記磁気検出部に相対するまでの180°の磁性体による影響を受けない第1回転範囲に設定した所定角度ごとの複数の切替位置を示す切替信号及び残り180°の磁性体の影響を受ける第2回転範囲に設定した第1設定範囲の切替信号とレベルの異なる所定角度の複数の切替位置を示す切替信号の各々を、電気回路に出力して制御する。
磁石部材は棒状であり、操作部材は、磁石部材の両端の磁極面を通る磁力線に直交する回転軸により回転自在に配置すると共に、回転軸による磁石部材の回転面上の両端の磁極面を通る磁力線に直交する所定位置に磁石部材と一体に回転する磁性体を配置し、
磁気検出部は、磁石部材の回転面上の磁極面回転位置の外側の所定位置に配置し、
制御部は、磁石部材の一方の磁極面が前記磁気検出部に相対した初期位置から他方の磁極面が前記磁気検出部に相対するまでの180°の磁性体による影響を受けない第1回転範囲に設定した所定角度ごとの複数の切替位置を示す切替信号及び残り180°の磁性体の影響を受ける第2回転範囲に設定した第1設定範囲の切替信号とレベルの異なる所定角度の複数の切替位置を示す切替信号の各々を、電気回路に出力して制御する。
(磁石部材、磁性体及び反磁性体の回転による切替位置の検出)
磁石部材は棒状であり、操作部材は、磁石部際の両端の磁極面を通る磁力線に直交する回転軸により回転自在に配置すると共に、回転軸による磁石部材の回転面上の両端の磁極面を通る磁力線に直交する所定位置に磁石部材と一体に回転する強磁性体と反磁性体を回転軸心を挟んで相対配置し、
磁気検出部は、磁石部材の回転面上の磁極面回転位置の外側の所定位置に配置し、
制御部は、磁石部材の一方の磁極面が磁気検出部に相対した初期位置から他方の磁極面が磁気検出部に相対するまでの180°の反磁性体による影響を受ける第1回転範囲に設定した所定角度ごとの複数の切替位置を示す切替信号及び残り180°の強磁性体の影響を受ける第2回転範囲に設定した第1設定範囲の切替信号とレベルの異なる所定角度の複数の切替位置を示す切替信号の各々を、電気回路に出力して制御する。
磁石部材は棒状であり、操作部材は、磁石部際の両端の磁極面を通る磁力線に直交する回転軸により回転自在に配置すると共に、回転軸による磁石部材の回転面上の両端の磁極面を通る磁力線に直交する所定位置に磁石部材と一体に回転する強磁性体と反磁性体を回転軸心を挟んで相対配置し、
磁気検出部は、磁石部材の回転面上の磁極面回転位置の外側の所定位置に配置し、
制御部は、磁石部材の一方の磁極面が磁気検出部に相対した初期位置から他方の磁極面が磁気検出部に相対するまでの180°の反磁性体による影響を受ける第1回転範囲に設定した所定角度ごとの複数の切替位置を示す切替信号及び残り180°の強磁性体の影響を受ける第2回転範囲に設定した第1設定範囲の切替信号とレベルの異なる所定角度の複数の切替位置を示す切替信号の各々を、電気回路に出力して制御する。
(2箇所に配置した磁気検出器による切替位置の検出)
棒状の磁石部材は棒状であり、操作部材は、磁石部材の両端の磁極面を通る磁力線に直交する回転軸により回転自在に配置し、
磁気検出部は、磁石部材の回転面上の磁極面回転位置の外側の90°異なる2箇所の所定位置に配置し、
制御部は、磁石部材の1回転における所定角度毎の前記2箇所に配置した磁気検出器の異なる検出信号の組合せによる複数の切替位置を示す切替信号を電気回路に出力して制御する。
棒状の磁石部材は棒状であり、操作部材は、磁石部材の両端の磁極面を通る磁力線に直交する回転軸により回転自在に配置し、
磁気検出部は、磁石部材の回転面上の磁極面回転位置の外側の90°異なる2箇所の所定位置に配置し、
制御部は、磁石部材の1回転における所定角度毎の前記2箇所に配置した磁気検出器の異なる検出信号の組合せによる複数の切替位置を示す切替信号を電気回路に出力して制御する。
(スライド切替操作)
操作部材は磁石部材をスライドして複数の切替位置に移動する。
操作部材は磁石部材をスライドして複数の切替位置に移動する。
(基本的な効果)
本発明は筐体の内部に電気回路を配置した機器に設ける操作装置に於いて、筐体の外側に配置され、磁石部材を複数の切替位置に移動する操作部材と、筐体の内部に配置され、操作部材により移動する磁石部材の磁気の強さに応じた磁気検出信号を出力する磁気検出部と、磁気検出部から出力する磁気検出信号に基づいて操作部材の切替位置を示す切替信号を電気回路に出力する制御部とを設けるようにしたため、筐体外部には磁石部材を複数の切替位置に移動可能に操作部材を設け、筐体内部には磁気検出部を設け、筐体内部には磁気検出部を設けるだけで良いことから、設置スペースの制約を受けることなく多点切替えが可能となり、操作装置として構造が簡単であることから小型化が容易でコストの低減を可能とする。
本発明は筐体の内部に電気回路を配置した機器に設ける操作装置に於いて、筐体の外側に配置され、磁石部材を複数の切替位置に移動する操作部材と、筐体の内部に配置され、操作部材により移動する磁石部材の磁気の強さに応じた磁気検出信号を出力する磁気検出部と、磁気検出部から出力する磁気検出信号に基づいて操作部材の切替位置を示す切替信号を電気回路に出力する制御部とを設けるようにしたため、筐体外部には磁石部材を複数の切替位置に移動可能に操作部材を設け、筐体内部には磁気検出部を設け、筐体内部には磁気検出部を設けるだけで良いことから、設置スペースの制約を受けることなく多点切替えが可能となり、操作装置として構造が簡単であることから小型化が容易でコストの低減を可能とする。
(切替位置の表示による効果)
また、制御部は、切替信号に基づいて電気回路を制御した場合に、操作部材による切替内容を表示部に表示させるようにしたため、切替操作により例えばチャンネル周波数を切替えた場合に、例えば表示部に設けたLEDの点滅回数により切替えたチャンネルを示す表示を行うことで、切替え操作の結果を容易に確認可能とする。
また、制御部は、切替信号に基づいて電気回路を制御した場合に、操作部材による切替内容を表示部に表示させるようにしたため、切替操作により例えばチャンネル周波数を切替えた場合に、例えば表示部に設けたLEDの点滅回数により切替えたチャンネルを示す表示を行うことで、切替え操作の結果を容易に確認可能とする。
(磁気検出信号の極性とレベルによる切替位置の効果)
また、磁気検出部は、磁石部材からの磁気の方向に応じた極性と磁気の強さに応じたレベルの磁気検出信号を出力し、制御部は、磁気検出信号の極性とレベルに基づいて操作部材の切替位置を示す切替信号を出力するようにしたため、磁気検出信号の極性とレベルによってより多くの多点切替えを可能とする。
また、磁気検出部は、磁石部材からの磁気の方向に応じた極性と磁気の強さに応じたレベルの磁気検出信号を出力し、制御部は、磁気検出信号の極性とレベルに基づいて操作部材の切替位置を示す切替信号を出力するようにしたため、磁気検出信号の極性とレベルによってより多くの多点切替えを可能とする。
(切替位置決め機構による効果)
また、操作部材は、複数の切替位置に移動した場合に切替位置を保持する位置決め機構を備えることで、操作部材を移動操作した場合に、必要とする切替位置に確実に移動して切替え制御を可能とする。
また、操作部材は、複数の切替位置に移動した場合に切替位置を保持する位置決め機構を備えることで、操作部材を移動操作した場合に、必要とする切替位置に確実に移動して切替え制御を可能とする。
(回転切替操作による効果)
また、操作部材は磁石部材を回転して複数の切替え位置に移動するようにしたため、従来のロータリースイッチと同等な切替え操作が可能となり、操作部材を回転操作で多点切替えができるので、必要な操作スペースを節減し、狭い場所であっても容易に操作可能とする。
また、操作部材は磁石部材を回転して複数の切替え位置に移動するようにしたため、従来のロータリースイッチと同等な切替え操作が可能となり、操作部材を回転操作で多点切替えができるので、必要な操作スペースを節減し、狭い場所であっても容易に操作可能とする。
(磁石部材の回転による切替位置の検出による効果)
また,磁石部材は棒状であり、両端の操作部材は、磁石部材の磁極面を通る磁力線に直交する回転軸により回転自在に配置し、磁気検出部は、磁石部材の回転面上の磁極面回転位置の外側の所定位置に配置し、制御部は、磁石部材の一方の磁極面が前記磁気検出部に相対した初期位置から磁石部材の他方の磁極面が磁気検出部に相対するまでの180°の回転範囲に設定した所定角度ごとの複数の切替位置を示す切替信号を前記電気回路に出力して制御するようにしたため、操作部材を180°の範囲で所定角度単位に切替操作することで、例えば複数のチャンネル周波数の選択を可能とする。
また,磁石部材は棒状であり、両端の操作部材は、磁石部材の磁極面を通る磁力線に直交する回転軸により回転自在に配置し、磁気検出部は、磁石部材の回転面上の磁極面回転位置の外側の所定位置に配置し、制御部は、磁石部材の一方の磁極面が前記磁気検出部に相対した初期位置から磁石部材の他方の磁極面が磁気検出部に相対するまでの180°の回転範囲に設定した所定角度ごとの複数の切替位置を示す切替信号を前記電気回路に出力して制御するようにしたため、操作部材を180°の範囲で所定角度単位に切替操作することで、例えば複数のチャンネル周波数の選択を可能とする。
(磁石部材と磁性体の回転による切替位置検出の効果)
また、磁石部材は棒状であり、操作部材は、磁石部材の両端の磁極面を通る磁力線に直交する回転軸により回転自在に配置すると共に、回転軸による磁石部材の回転面上の両端の磁極面を通る磁力線に直交する所定位置に磁石部材と一体に回転する磁性体を配置し、磁気検出部は、磁石部材の回転面上の磁極面回転位置の外側の所定位置に配置し、制御部は、磁石部材の一方の磁極面が前記磁気検出部に相対した初期位置から他方の磁極面が磁気検出部に相対するまでの180°の磁性体による影響を受けない第1回転範囲に設定した所定角度ごとの複数の切替位置を示す切替信号及び残り180°の磁性体の影響を受ける第2回転範囲に設定した第1設定範囲の切替信号とレベルの異なる所定角度の複数の切替位置を示す切替信号の各々を、電気回路に出力して制御するようにししたため、初期位置から180°の第1回転範囲での切替位置に加え、残り180°の第2回転位置での切替位置が加わることで、捜査部材の1回転による切替数を増加可能とする。
また、磁石部材は棒状であり、操作部材は、磁石部材の両端の磁極面を通る磁力線に直交する回転軸により回転自在に配置すると共に、回転軸による磁石部材の回転面上の両端の磁極面を通る磁力線に直交する所定位置に磁石部材と一体に回転する磁性体を配置し、磁気検出部は、磁石部材の回転面上の磁極面回転位置の外側の所定位置に配置し、制御部は、磁石部材の一方の磁極面が前記磁気検出部に相対した初期位置から他方の磁極面が磁気検出部に相対するまでの180°の磁性体による影響を受けない第1回転範囲に設定した所定角度ごとの複数の切替位置を示す切替信号及び残り180°の磁性体の影響を受ける第2回転範囲に設定した第1設定範囲の切替信号とレベルの異なる所定角度の複数の切替位置を示す切替信号の各々を、電気回路に出力して制御するようにししたため、初期位置から180°の第1回転範囲での切替位置に加え、残り180°の第2回転位置での切替位置が加わることで、捜査部材の1回転による切替数を増加可能とする。
(磁石部材、磁性体及び反磁性体の回転による切替位置の検出の効果)
また、磁石部材は棒状であり、操作部材は、磁石部際の両端の磁極面を通る磁力線に直交する回転軸により回転自在に配置すると共に、回転軸による磁石部材の回転面上の両端の磁極面を通る磁力線に直交する所定位置に磁石部材と一体に回転する強磁性体と反磁性体を回転軸心を挟んで相対配置し、磁気検出部は、磁石部材の回転面上の磁極面回転位置の外側の所定位置に配置し、制御部は、磁石部材の一方の磁極面が磁気検出部に相対した初期位置から他方の磁極面が磁気検出部に相対するまでの180°の反磁性体による影響を受ける第1回転範囲に設定した所定角度ごとの複数の切替位置を示す切替信号及び残り180°の強磁性体の影響を受ける第2回転範囲に設定した第1設定範囲の切替信号とレベルの異なる所定角度の複数の切替位置を示す切替信号の各々を、電気回路に出力して制御するようにしたため、初期位置から180°の第1回転範囲での切替位置に加え、残り180°の第2回転位置での切替位置が加わることで、捜査部材の1回転による切替数を増加可能し、更に、第1回転範囲での反磁性体の影響による磁気検出レベルの低下と、第2回転範囲での強磁性体の影響による磁気検出レベルの増加とにより、回転角が180゜異なる相対位置でのレベル差を拡大して区別しやすくすることで切替検出の性能を向上可能とする。
また、磁石部材は棒状であり、操作部材は、磁石部際の両端の磁極面を通る磁力線に直交する回転軸により回転自在に配置すると共に、回転軸による磁石部材の回転面上の両端の磁極面を通る磁力線に直交する所定位置に磁石部材と一体に回転する強磁性体と反磁性体を回転軸心を挟んで相対配置し、磁気検出部は、磁石部材の回転面上の磁極面回転位置の外側の所定位置に配置し、制御部は、磁石部材の一方の磁極面が磁気検出部に相対した初期位置から他方の磁極面が磁気検出部に相対するまでの180°の反磁性体による影響を受ける第1回転範囲に設定した所定角度ごとの複数の切替位置を示す切替信号及び残り180°の強磁性体の影響を受ける第2回転範囲に設定した第1設定範囲の切替信号とレベルの異なる所定角度の複数の切替位置を示す切替信号の各々を、電気回路に出力して制御するようにしたため、初期位置から180°の第1回転範囲での切替位置に加え、残り180°の第2回転位置での切替位置が加わることで、捜査部材の1回転による切替数を増加可能し、更に、第1回転範囲での反磁性体の影響による磁気検出レベルの低下と、第2回転範囲での強磁性体の影響による磁気検出レベルの増加とにより、回転角が180゜異なる相対位置でのレベル差を拡大して区別しやすくすることで切替検出の性能を向上可能とする。
(2箇所に配置した磁気検出器による切替位置の検出)
また、棒状の磁石部材は棒状であり、操作部材は、磁石部材の両端の磁極面を通る磁力線に直交する回転軸により回転自在に配置し、磁気検出部は、磁石部材の回転面上の磁極面回転位置の外側の90°異なる2箇所の所定位置に配置し、制御部は、磁石部材の1回転における所定角度毎の前記2箇所に配置した磁気検出器の異なる検出信号の組合せによる複数の切替位置を示す切替信号を電気回路に出力して制御する。
また、棒状の磁石部材は棒状であり、操作部材は、磁石部材の両端の磁極面を通る磁力線に直交する回転軸により回転自在に配置し、磁気検出部は、磁石部材の回転面上の磁極面回転位置の外側の90°異なる2箇所の所定位置に配置し、制御部は、磁石部材の1回転における所定角度毎の前記2箇所に配置した磁気検出器の異なる検出信号の組合せによる複数の切替位置を示す切替信号を電気回路に出力して制御する。
(スライド切替操作による効果)
また、操作部材は磁石部材をスライドして複数の切替位置に移動するようにしたため、従来のスライドスイッチ構造を備えたディップスイッチと同等な切替え操作が可能となり、また小型化が容易で設置スペースを低減可能とする。
また、操作部材は磁石部材をスライドして複数の切替位置に移動するようにしたため、従来のスライドスイッチ構造を備えたディップスイッチと同等な切替え操作が可能となり、また小型化が容易で設置スペースを低減可能とする。
[防水型感知器の概要]
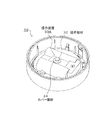
図1は本発明による操作装置を備えた防水型機器の一例として無線式の防水型感知器を示した説明図であり、図1(A)に正面図を示し、図1(B)に下側から見た平面図を示している。また、図2は操作装置を備えた防水型感知器を裏面側から示した斜視図である。
図1は本発明による操作装置を備えた防水型機器の一例として無線式の防水型感知器を示した説明図であり、図1(A)に正面図を示し、図1(B)に下側から見た平面図を示している。また、図2は操作装置を備えた防水型感知器を裏面側から示した斜視図である。
図1に示すように、本実施形態の防水型感知器10は、カバー12の下部に形成したカードカバー14の内部に、サーミスタなどを用いた温度検出部16を火災による熱気流が受けるように配置しており、カバー12の下側から見える2箇所の位置には発報表示灯として動作するLED15を設けている。
図2に示すように、防水型感知器10はカバー12の天井面側に位置する裏面側の中央にロータリー型の操作装置30Aを設けており、操作装置30Aはカバー部材34の中に操作ツマミとなる操作部材32を設け、操作部材32は回転操作により切替え可能な例えば5つの切替位置を持ち、内蔵した通信部に対するチャンネル周波数を切替え選択可能としている。
[防水型感知器の内部構造]
図3は防水型感知器の内部構造を示した断面図である。図3に示すように、防水型感知器10はカバー12の内部に防水筐体本体18を収納し、防水筐体本体18の上部にはシールリング22を介して防水筐体カバー20を固定し、内部に密閉空間を形成している。この防水筐体本体18と防水筐体カバー20でなる防水筐体の内部には回路基板24を組み込んでいる。
図3は防水型感知器の内部構造を示した断面図である。図3に示すように、防水型感知器10はカバー12の内部に防水筐体本体18を収納し、防水筐体本体18の上部にはシールリング22を介して防水筐体カバー20を固定し、内部に密閉空間を形成している。この防水筐体本体18と防水筐体カバー20でなる防水筐体の内部には回路基板24を組み込んでいる。
防水筐体カバー20の上部、即ち防水型感知器10の裏面側には、操作装置30Aを設けており、操作装置30Aは操作部材32の下部に磁石部材36を組み込んでおり、操作部材32の回転操作により磁石部材36を回転させる。操作部材32に設けた磁石部材36に近接した防水筐体カバー20の内部には、回路基板24に対し起立配置した回路基板26に接続した磁気検知部28を配置し、操作部材32の回転操作による磁石部材36からの磁気の強さ、即ち磁束密度の変化に応じた磁気検出信号を出力するようにしている。
[ロータリー型の操作装置]
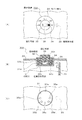
図4は防水型感知器に設けたロータリー型の操作装置の実施形態を取り出して示した説明図であり、図4(A)は平面を示し、図4(B)は断面を示し、図4(C)は操作装置の収納穴を平面で示している。
図4は防水型感知器に設けたロータリー型の操作装置の実施形態を取り出して示した説明図であり、図4(A)は平面を示し、図4(B)は断面を示し、図4(C)は操作装置の収納穴を平面で示している。
図4に示すように、ロータリー型の操作装置30Aは、防水筐体カバー20に形成した円筒形の収納穴31の中に、下端中央に横向きに磁石部材36を組み込んだ操作部材32を収納し、カバー部材34の収納穴31に対するねじ込みにより回転自在に抜け止め配置している。
詳細に説明すると、操作部材32は上部の小径部32aと下部の大径部32bの段付き円柱体であり、下端に棒状の磁石部材36を磁極が左右に位置するように横向きに組込み配置している。カバー部材34はリング状のカバー本体の下側に円筒部を形成し、この円筒部の外側をねじ部とし、操作部材32の小径部32aに上から挿入した状態でねじ部を、収納穴31のねじ穴31aにねじ込むことで、操作部材32を収納穴31の中に回転自在に抜け止め配置している。
操作装置30Aには、操作部材32の位置決め機構を設けている。この位置決め機構は、操作部材32の下端の図示左側に位置決め突起32cを形成し、これに対応して収納穴31の底部に、位置決め凹部35a〜35eを、0°〜180°の範囲に45°間隔で5カ所に分けて設け、位置決め突起32cが位置決め凹部35a〜35eと嵌着する切替位置に、操作部材32を位置決め停止可能としている。
この切替位置に対応して操作部材32の上面には切替位置を示すマーカ38を設け、また、カバー部材34には、0°〜180°の範囲に45°間隔に、チャンネル切替位置を示すCH1,CH2,CH3.CH4,CH5を表示している。
磁気検出部28はホール素子を使用する。ホール素子は周知のように、ホール素子に流す電流に垂直な方向に磁界を掛けると、電流と磁界の両方に直交する方向に起電力が発生するホール効果を利用している。
ホール素子は等価的に抵抗ブリッジ回路で表すことができ、磁気を近付けると抵抗ブリッジ回路の平衡が崩れ、磁気の強さに応じた磁気検出信号を出力する。またホールセンサには、S極またはN極のみを検出する単極検出型と、S極またはN極の両方を検出する両極検出型があるが、本実施形態にあっては両極検出型を使用している。
磁気検知部28は、図示の初期位置にある操作部材32に設けた磁石部材36のN極に相対する防水筐体カバー20内の所定位置に配置しており、操作部材32により磁石部材36を回転すると、ホール素子を通過する磁界の強さ及び磁界の方向が変化し、磁界の強さに応じたレベルで、磁界の方向に応じた極性の磁気検出信号を出力する。
[防水型感知器の機能構成]
(機能構成の概略)
図5は操作装置を備えた防水型感知器の機能構成を示したブロック図である。図5に示すように、防水型感知器10は、制御部60、アンテナ64を接続した通信部62、センサ部66、表示部68、磁気検知部28を備えた操作装置30A及び電池電源70で構成している。
(機能構成の概略)
図5は操作装置を備えた防水型感知器の機能構成を示したブロック図である。図5に示すように、防水型感知器10は、制御部60、アンテナ64を接続した通信部62、センサ部66、表示部68、磁気検知部28を備えた操作装置30A及び電池電源70で構成している。
制御部60は、ハードウェアとして、CPU、メモリ、各種の入出力ポート等を備えたマイクロプロセッサユニット(MPU)等で構成する。また、制御部60は、CPUによるプログラムの実行により制御機能を実現する。
通信部62は送信回路を備えており、日本国内の場合には、例えば400MHz帯の特定小電力無線局の標準規格に従った無線通信を行う。通信部62のチャンネル周波数は、400MHz帯の特定小電力無線局標準規格で使用可能な48チャンネル周波数の内、本実施形態にあっては、例えば5つのチャンネル周波数f1,f2,f3.f4,f5を選択的に使用可能とする。この周波数チャンネルf1,f2,f3.f4,f5を、以下の説明にあってはチャンネルCH1,CH2,CH3,CH4,CH5として説明する。
通信部62は、火災などのイベントを検出したときに、制御部60の指示に基づき、所定の電文フォーマットからなる電文信号(以下、「電文」という)を送信する。電文フォーマットは位相修正信号、送信元ID、電文内容及びエラーチェックコードで構成され、受信側では送信元IDを見て登録されているノードIDに一致するかどうか判断してから電文内容の意味を判断して処理する。
センサ部66は例えばサーミスタなどの温度検出部を備え、温度検出信号を制御部60に出力する。表示部68は発報表示灯として機能するLEDを備え、LEDは発報表示以外に、操作装置30Aによるチャンネル切替え操作の際にも表示駆動される。
操作装置30Aは図4に示した構造であり、操作部材32の回転操作によりチャンネルCH1,CH2,CH3,CH4,CH5の何れかの位置に切替えてチャンネル周波数の選択を可能とする。
(磁気検知部による切替位置の検出)
図6はロータリー型の操作装置で磁石部材を回転切替えした場合の磁力線分布の変化を示した説明図、図7は操作部材で磁石部材を回転切替えした場合の回転角に対する磁気検出信号の変化を示した説明図である。
図6はロータリー型の操作装置で磁石部材を回転切替えした場合の磁力線分布の変化を示した説明図、図7は操作部材で磁石部材を回転切替えした場合の回転角に対する磁気検出信号の変化を示した説明図である。
図6(A)に示す回転角θ=0°となるチャンネルCH1の切替位置では、磁石部材36のN極が磁気検知部28に相対し、N極からS極に向かう磁力線が磁気検知部28を、磁気ベクトルB1で示すように通過し、これはホール素子に流れる電流方向に直交する方向に通過していることになり、プラス極性の飽和レベルとなる磁気検出信号を出力する。即ち、磁気検知部28は図7のP1点に示すように、プラス極性の飽和レベルとなる磁気検出信号を出力する。
図6(B)に示す左回り回転した回転角θ=45°となるチャンネルCH2の切替位置では、磁石部材36のN極が磁気検知部28から遠ざかり、N極からS極に向かう磁力線が磁気検知部28を磁気ベクトルB2で示すように斜め通過し、磁気ベクトルB2の水平成分となる強さに応じてレベルの低下した磁気検出信号を出力する。即ち、磁気検知部28は図7のP2点に示すように、プラス極性の飽和レベルより低下したレベルの磁気検出信号を出力する。
図6(C)に示す左回り回転した回転角θ=90°となるチャンネルCH3の切替位置では、磁石部材36のN極が磁気検知部28から更に遠ざかり、N極からS極に向かう磁力線が磁気検知部28を磁気ベクトルB2で示すように通過し、これはホール素子に流れる電流方向と略同じ方向となるように通過していることになり、そのため略0レベルの低下した磁気検出信号を出力する。即ち、磁気検知部28は図7のP3点に示すように、略0レベルに低下した磁気検出信号を出力する。
図6(D)に示す左回り回転した回転角θ=135°となるチャンネルCH4の切替位置では、磁石部材36のS極が磁気検知部28に近づき、N極からS極に向かう磁力線が磁気検知部28を磁気ベクトルB4で示すように斜めに通過し、磁気ベクトルB2の水平成分は逆向きとなり、これはホール素子に流れる電流方向に直交する図6(B)とは逆方向に通過していることになり、マイナス極性の所定レベルとなる磁気検出信号を出力する。即ち、磁気検知部28は図7のP4点に示すように、マイナス極性の所定レベルに変化した磁気検出信号を出力する。
図6(E)に示す左回り回転した回転角θ=180°となるチャンネルCH5の切替位置では、磁石部材36のS極が磁気検知部28に相対し、S極に向かう磁力線が磁気検知部28を磁気ベクトルB5で示すように水平に通過し、これはホール素子に流れる電流方向に直交する図6(A)とは逆方向に通過していることになり、マイナス極性の飽和レベルとなる磁気検出信号を出力する。即ち、磁気検知部28は図7のP5点に示すように、マイナス極性の飽和レベルとなる磁気検出信号を出力する。
なお、磁石部材36を、更にθ=225°、270°、315°、360°と切替えた場合、θ=135°、90°、45°、0°の場合と同じ極性で同じレベルの磁気検出信号の出力となって区別できないことから、θ=225°、270°、315°、360°の切替位置は使用しない。
図5の防水型感知器10に設けた制御部60は、磁気検知部28から出力される磁気検知信号に対し、図7に示すように、P1点とP2点の間となる閾値+TH1、P2点とP3点の間となる閾値+TH2、P3点とP4点の間となる閾値−TH2、P4点とP5点の間となる閾値−TH1を設定しており、磁気出信号Eにつき、
CH1: +TH1<E
CH2: +TH2<E<+TH1
CH3: −TH2<E<+TH2
CH4: −TH2<E<−TH1
CH5: −TH2>E
の条件を判別してチャンネルCH1〜CH5の切替えを制御する。
CH1: +TH1<E
CH2: +TH2<E<+TH1
CH3: −TH2<E<+TH2
CH4: −TH2<E<−TH1
CH5: −TH2>E
の条件を判別してチャンネルCH1〜CH5の切替えを制御する。
また、制御部60は、磁気検出信号から切替位置を判別してチャンネルCH1〜CH5の何れかを選択した場合、例えば表示部68に設けているLEDの点滅回数により選択したチャンネルを識別表示する制御を行う。例えば制御部60はチャンネルCH1を選択した場合はLEDを1回点滅し、チャンネルCH2を選択した場合はLEDを2回点滅し、チャンネルCH3を選択した場合はLEDを3回点滅し、チャンネルCH4を選択した場合はLEDを4回点滅し、チャンネルCH5を選択した場合はLEDを5回点滅する。
なお、図6及び図7はチャンネル設定を例にとっているが、これ以外に、図5の制御部60の機能を実現するCPUのスリープモードやウェイクアップモード等の設定にも使用可能であり、更に、防水型感知器の電源操作をチャンネル設定と共に行うことを可能とする。この点は以下の実施形態においても同様である。
[磁石部材と強磁性体を備えたロータリー型の操作装置]
図8は強磁性体を備えたロータリー型の操作装置で磁石部材を回転切替えした場合の磁力線分布の変化を示した説明図、図9は図8に続く操作部材で磁石部材を回転切替えした場合の回転角に対する磁気検出信号の変化を示した説明図、図10は強磁性体を備えた操作部材で磁石部材を回転切替えした場合の回転角に対する磁気検出信号の変化を示した説明図である。なお、図10では強磁性体がないときの特性を想像線で示している。
図8は強磁性体を備えたロータリー型の操作装置で磁石部材を回転切替えした場合の磁力線分布の変化を示した説明図、図9は図8に続く操作部材で磁石部材を回転切替えした場合の回転角に対する磁気検出信号の変化を示した説明図、図10は強磁性体を備えた操作部材で磁石部材を回転切替えした場合の回転角に対する磁気検出信号の変化を示した説明図である。なお、図10では強磁性体がないときの特性を想像線で示している。
図4乃至図7に示した実施形態にあっては、操作部材32を初期位置から180°の回転範囲に切替位置を設定しているが、本実施形態は、これに加え、残りの180°の回転範囲についても切替位置の設定を可能とし、操作部材32の回転による切替数を増加させるようにしたことを特徴とする。
図8(A)は操作部材を初期位置に操作した状態での磁石部材36の磁力線分布を示しており、回転自在な棒状の磁石部材36のN極の磁極面に相対した所定位置に磁気検出器28を配置しており、この点は、図4乃至図7の実施形態と同じである。これに加え本実施形態にあっては、磁石部材36の紙面に垂直となる回転軸心Oに対し両端の磁極面を通る磁力線に直交した位置に、強磁性体50を磁石部材28と一体に回転自在に配置している。また、強磁性体50の回転位置は、図9(G)に示す270°の回転位置で磁気検出器28に当たることなく例えば外側に位置するように操作部材32に配置している。
(磁気検知部による切替位置の検出)
図8(A)〜(E)に示す操作部材32を45°単位に切替回転した初期位置の0°から180°までの第1回転範囲では、磁石部材36と一体に回転する強磁性体50は、磁気検出器28を通過する磁力線に影響を与えることがほとんどなく、磁性体50を無視してもよく、そのため図10のP1〜P5点に示す磁気検出信号が得られ、チャンネルCH1〜CH5の切替を可能とする。
図8(A)〜(E)に示す操作部材32を45°単位に切替回転した初期位置の0°から180°までの第1回転範囲では、磁石部材36と一体に回転する強磁性体50は、磁気検出器28を通過する磁力線に影響を与えることがほとんどなく、磁性体50を無視してもよく、そのため図10のP1〜P5点に示す磁気検出信号が得られ、チャンネルCH1〜CH5の切替を可能とする。
これに対し図8(E)〜図9(H)〜図8(A)となる残り180°となる第2回転範囲では、磁石部材36と一体に回転する強磁性体50は、磁気検出器28を通過する磁力線に影響を与えるようになる。例えば、磁力線は強磁性体50に集まるように通過しており、強磁性体50が磁気検出器28に近づくと、磁気検出器28を通過する磁力線が増加し、それに伴い、磁気検出信号のレベルが増加する。そのため図10に示すように、180°〜360°の範囲では、0°〜180°の範囲に比べ、磁気検出信号のレベルが磁性体50の影響を受けて増加し、回転角θ=225°となるP6点のレベルが、回転角θ=135°となるP4点のレベルと異なり、チャンネルCH6の切替えを可能とする。また、回転角θ=315°となるP7点のレベルが、回転角θ=45°となるP2点のレベルと異なり、チャンネルCH7の切替えを可能とする。このため操作部材32の1回転により、チャンネルCH1〜CH7となる7つの周波数チャンネルの切り替えを可能とする。
なお、図8及び図9において、強磁性体50に代えて反磁性体を使用しても良い。反磁性体51は、磁場の中においたとき、磁場と逆の方向に磁化される銅、亜鉛、鉛等の物質である。
強磁性体50に代えて反磁性体を用いた場合には、回転角θ=0°〜180°は、図7と同じ特性となり、回転角θ=180°〜360°では、強磁性体を用いた場合とは逆の影響を受けて、P6点のレベルはP4点のレベルより大きくなり、P7点のレベルはP2点より小さくなることで、操作部材32の1回転により、チャンネルCH1〜CH7となる7つの周波数チャンネルの切り替えを可能とする。
[磁石部材、強磁性体及び反磁性体を備えたロータリー型の操作装置]
図11は磁性体及び反磁性体を備えたロータリー型の操作装置で磁石部材を回転切替えした場合の磁力線分布の変化を示した説明図、図12は図11に続く操作部材で磁石部材を回転切替えした場合の回転角に対する磁気検出信号の変化を示した説明図、図13は強磁性体及び反磁性体を備えた操作部材で磁石部材を回転切替えした場合の回転角に対する磁気検出信号の変化を示した説明図である。なお、図13では強磁性体及び反磁性体がないときの特性を想像線で示している。
図11は磁性体及び反磁性体を備えたロータリー型の操作装置で磁石部材を回転切替えした場合の磁力線分布の変化を示した説明図、図12は図11に続く操作部材で磁石部材を回転切替えした場合の回転角に対する磁気検出信号の変化を示した説明図、図13は強磁性体及び反磁性体を備えた操作部材で磁石部材を回転切替えした場合の回転角に対する磁気検出信号の変化を示した説明図である。なお、図13では強磁性体及び反磁性体がないときの特性を想像線で示している。
本実施形態にあっては、図8及び図9に示した強磁性体に加え、更に反磁性体を設け、回転角45°と315°及び回転角135°と225°における磁気検出信号のレベル差を大きくして検出性能を高めるようにしたことを特徴とする。反磁性体51は、磁場の中においたとき、字はと逆の方向に磁化される銅、亜鉛、鉛等の物質である。
図11(A)は操作部材を初期位置に操作した状態での磁石部材36の磁力線分布を示しており、回転自在な棒状の磁石部材36のN極の磁極面に相対した所定位置に磁気検出器28を配置し、磁石部材36の紙面に垂直となる回転軸心Oに対し両端の磁極面を通る磁力線に直交した位置に、強磁性体50を磁石部材28と一体に回転自在に配置しており、この点は図8及び図9の実施形態と同じである。これに加え本実施形態では、回転軸心Oに対し強磁性体50の反対側となる位置に反磁性体51を磁石部材28と一体に回転自在に配置している。
(磁気検知部による切替位置の検出)
図11(A)〜図12(H)に示した操作部材32の1回転による強磁性体50の磁気検出器28に対する影響は図8及び図9の場合と同じであり、図8(E)〜図9(H)〜図8(A)となる第2回転範囲で、強磁性体50は磁気検出器28を通過する磁力線に影響を与え、図13のP6点及びP7点を通る磁気検出特性が得られる。
図11(A)〜図12(H)に示した操作部材32の1回転による強磁性体50の磁気検出器28に対する影響は図8及び図9の場合と同じであり、図8(E)〜図9(H)〜図8(A)となる第2回転範囲で、強磁性体50は磁気検出器28を通過する磁力線に影響を与え、図13のP6点及びP7点を通る磁気検出特性が得られる。
これに対し磁石部材36と一体に回転する反磁性体51は、図11(A)〜(E)に示す操作部材32を45°単位に切替回転した初期位置の0°から180°までの第1回転範囲で磁気検出器28を通過する磁力線に影響を与えるようになる。例えば、磁力線は反磁性体51を避けるように通過しており、反磁性体51が磁気検出器28に近づくと、磁気検出器28を通過する磁力線が減少し、それに伴い、磁気検出信号のレベルが低下する。
そのため図13に示すように、0°〜180°の範囲では、反磁性体51がない場合に比べ、磁気検出信号のレベルが反磁性体51の影響を受けて減少し、回転角θ=45°となるP2点のレベルが低下し、回転角θ=315°となるP7点とのレベル差が大きくなり、チャンネルCH2とCH7を区別するための切替え性能を向上可能とする。
また、回転角θ=135°となるP4点のレベルが低下し、回転角θ=225°となるP6点とのレベル差が大きくなり、チャンネルCH4とCH6を区別するための切替え性能を向上可能とする。
[磁気検出器を2つ設けたロータリー型の操作装置]
図14は2つの磁気検出器を有する操作装置を備えた防水型感知器の機能構成を示したブロック図、図15は2つの磁気検出器を有するロータリー型の操作装置で磁石部材を回転切替えした場合の磁力線分布の変化を示した説明図、図16は図15に続く操作部材で磁石部材を回転切替えした場合の回転角に対する磁気検出信号の変化を示した説明図、図17は操作部材で磁石部材を回転切替えした場合の2つの磁気検出器の回転角に対する磁気検出信号の変化を示した説明図、図18は2つの磁気検出器による磁気検出信号の組合せによるチャンネル切替えを一覧で示した説明図である。
図14は2つの磁気検出器を有する操作装置を備えた防水型感知器の機能構成を示したブロック図、図15は2つの磁気検出器を有するロータリー型の操作装置で磁石部材を回転切替えした場合の磁力線分布の変化を示した説明図、図16は図15に続く操作部材で磁石部材を回転切替えした場合の回転角に対する磁気検出信号の変化を示した説明図、図17は操作部材で磁石部材を回転切替えした場合の2つの磁気検出器の回転角に対する磁気検出信号の変化を示した説明図、図18は2つの磁気検出器による磁気検出信号の組合せによるチャンネル切替えを一覧で示した説明図である。
(機能構成の概略)
図14に示すように、防水型感知器10は、制御部60、アンテナ64を接続した通信部62、センサ部66、表示部68、2台の磁気検知部28a,28bを備えた操作装置30A及び電池電源70で構成し、操作装置30Aの磁気検出器128a,28b及びこれに対応した制御部60による切替制御以外は図5の実施形態と同じである。
図14に示すように、防水型感知器10は、制御部60、アンテナ64を接続した通信部62、センサ部66、表示部68、2台の磁気検知部28a,28bを備えた操作装置30A及び電池電源70で構成し、操作装置30Aの磁気検出器128a,28b及びこれに対応した制御部60による切替制御以外は図5の実施形態と同じである。
磁気検出器28a,28bについては、図15(A)の操作部材により初期位置に切替えた場合の磁石部材36の磁力線分布に示すように、棒状の磁石部材36の回転軸心Oによる回転面上でN極面に相対した所定の半径位置に磁気検出器28aを配置し、磁気検出器28aに対し90°だけ回転角のずれた直交する同じ回転面上の半径位置に磁気検出器28bを配置している。
このため磁気検出器28aは、図15(A)〜図16(H)に示すように、磁石部材36の45°単位の回転角の変化に対し、磁界がB11〜B18と変化し、磁気検出器28aからの磁気検出信号は図17(A)に示すP11〜P18点のレベル+V1,+V2,0,−V2,−V1,−V2,0,+V2の変化となる。
また、磁気検出器28bは、図15(A)〜図16(H)に示すように、磁石部材36の45°単位の回転角の変化に対し、磁界がB21〜B28と変化し、磁気検出器28bからの磁気検出信号は図17(B)に示すP21〜P28点のレベル0,+V2,+V1,+V2,0,−V2,−V1,−V2の変化となり、図14(A)の磁気検出器28aに対し90°位相がシフトした変化となる。
制御部60は、図18に示すように、磁石部材36の1回転における45°単位の磁気検出器28a,28bの磁気検出信号の組合せに基づき、回転0°〜315°に対応した8つの切替位置を判別し、チャンネルCH1〜CH8の何れかを選択可能とする。
[スライド型の操作装置]
図19は防水型感知器に設けるスライド型の操作装置の実施形態を取り出して示した説明図であり、図19(A)はスライド方向の断面を示し、図16(B)は位置決め機構の断面を示し、図19(C)は平面を示し、図19(D)はスライド方向に直交する横方向の断面を示している。なお、図19(A)は図19(C)のA−A断面となり、図19(B)は図19(C)のB−B断面となり、図19(D)は図19(C)のD−D断面となる。
図19は防水型感知器に設けるスライド型の操作装置の実施形態を取り出して示した説明図であり、図19(A)はスライド方向の断面を示し、図16(B)は位置決め機構の断面を示し、図19(C)は平面を示し、図19(D)はスライド方向に直交する横方向の断面を示している。なお、図19(A)は図19(C)のA−A断面となり、図19(B)は図19(C)のB−B断面となり、図19(D)は図19(C)のD−D断面となる。
図19に示すように、スライド型の操作装置30Bは、防水筐体カバー20に形成した矩形のスライド穴44の中に、下端中央に横向き(スライド方向)に磁石部材36を配置した矩形の操作部材40をスライド自在に収納し、カバー部材42のスライド穴44の開口に対する嵌め込み固定より抜け止め配置している。
詳細に説明すると、操作部材40は幅の狭い上部40aと幅の広い下部40bの段付き矩形体であり、下端に棒状の磁石部材36を磁極がスライド方向に位置するように横向きに配置している。
操作装置30Bには、操作部材40の位置決め機構を設けている。この位置決め機構は、操作部材40の下端の2箇所に位置決め突起40cを形成し、これに対応してスライド穴44の底部のスライド方向に所定間隔で2列に、位置決め凹部46a〜46eを5カ所に分けて設け、位置決め突起40cの嵌着により操作部材40を位置決め凹部46a〜46eと嵌着する切替位置に位置決め停止可能としている。
この切替位置に対応して操作部材32の上面には切替位置を示すマーカを設け、また、カバー部材42には、所定間隔に、チャンネル切替位置を示すCH1,CH2,CH3.CH4,CH5を表示している。
磁気検出部28はホール素子を使用し、また、S極またはN極の両方を検出する両極検出型を使用している。
磁気検知部28は、操作部材40をスライド穴44の右端の初期位置に位置決めした状態で、操作部材40に設けた磁石部材36の中心に一致した防水筐体カバー20内の回路基板24の位置に配置しており、操作部材40を左方向にスライドすると、磁石部材36が磁気検出部28から遠ざかり、磁気検出部28のホール素子を通過する磁界の強さが低下し、磁界の強さに応じたレベルで、磁界の方向に応じた極性の磁気検出信号を出力する。
以下の説明では、操作部材40の切替位置を、左側からL1,L2,L3,L4,L5とし、それぞれチャンネルCH1,CH2,CH3,CH4,CH5に対応している。
(磁気検知部による切替位置の検出)
図20はスライド型の操作装置で磁石部材をスライド操作した場合の磁力線分布の変化を示した説明図である。なお、図20(A)は初期位置となる切替位置L1を示し、図20(B)(C)は2番目及び3番目の切替位置L2,L3を示している。
図20はスライド型の操作装置で磁石部材をスライド操作した場合の磁力線分布の変化を示した説明図である。なお、図20(A)は初期位置となる切替位置L1を示し、図20(B)(C)は2番目及び3番目の切替位置L2,L3を示している。
図20(A)に示す初期位置となるチャンネルCH1の切替位置L1では、磁気検出部28に対し磁石部材36の中心が位置しており、磁石部材36のN極からS極に向かう磁力線が磁気検知部28の磁気ベクトルB1で示すように、ホール素子に直交するように通過し、磁気検出信号は所定のピークレベルとなっている。
図20(B)に示すチャンネルCH2の切替位置L2では、磁気検出部28に対し磁石部材36が左側に遠ざかり、磁石部材36のN極からS極に向かう磁力線が磁気検知部28の磁気ベクトルB2で示すように、ホール素子を斜めに通過し、磁気検出部28はベクトルB2の水平成分に応じたピークレベルから低下したレベルの磁気検出信号を出力する。
図20(C)に示すチャンネルCH3の切替位置L3では、磁気検出部28に対し磁石部材36が左側に更に遠ざかり、磁石部材36のN極からS極に向かう磁力線が磁気検知部28の磁気ベクトルB3で示すように、ホール素子を斜めに通過し、磁気検出部28は更にレベルの低下した磁気検出信号を出力する。
更に、図示を省略した切替位置L4,L5になると、磁石部材36は磁気検出部28から更に遠ざかり、磁気検出信号は順次低下する。
図5の防水型感知器10に設けた制御部60は、図20の磁気検知部28から出力される磁気検知信号に対し、切替位置L1〜L5の各々の磁気検出信号のレベルを判別する閾値を予め設定し、切替位置の判別に基づきチャンネルCH1〜CH5の何れかを選択する制御を行う。
[スライド型の操作装置]
図21は防水型感知に設けるスライド型の操作装置の他の実施形態を取り出して示した説明図であり、図21(A)はスライド方向の断面を示し、図21(B)は位置決め機構の断面を示し、図21(C)は平面を示し、図21(D)はスライド方向に直交する横方向の断面を示している。なお、図21(A)は図21(C)のA−A断面となり、図21(B)は図21(C)のB−B断面となり、図21(D)は図21(C)のD−D断面となる。
図21は防水型感知に設けるスライド型の操作装置の他の実施形態を取り出して示した説明図であり、図21(A)はスライド方向の断面を示し、図21(B)は位置決め機構の断面を示し、図21(C)は平面を示し、図21(D)はスライド方向に直交する横方向の断面を示している。なお、図21(A)は図21(C)のA−A断面となり、図21(B)は図21(C)のB−B断面となり、図21(D)は図21(C)のD−D断面となる。
図21に示すように、スライド型の操作装置30Cは、防水筐体カバー20に形成した矩形のスライド穴44の中に、下端中央に横向き(スライド方向)に磁石部材36を配置した矩形の操作部材40をスライド自在に収納し、カバー部材42のスライド穴44の開口に対する嵌め込み固定より抜け止め配置している。なお、カバー部材42に表示したCH1〜CH5は切替位置L1〜L5に対応している。
図21の実施形態にあっては、操作部材40に設けた磁石部材36の左側のN極に相対して防水筐体カバー20内に磁気検出部28を設けたことを特徴とする。それ以外の構造は図8の実施形態と同じであることから、同一符号を付して、その説明は省略する。
本実施形態では、操作部材40に設けた磁石部材36のN極に相対して磁気検出部28を配置するため、スライド穴44の深さと操作部材40の高さが、図16の実施形態に比べ、大きくなっている点で相違するだけである。
本実施形態にあっては、操作部材40を図示の初期位置となる切替位置L1から左方向にスライドして切替位置L2〜L5に切替移動すると、磁石部材36のN極と磁気検出部28との間隔が増加して磁界の強さが低下し、これに応じて磁気検出信号のレベルも減少し、図5に示した制御部60は、切替位置L1〜L5の各々の磁気検出信号のレベルを判別する閾値を予め設定し、切替位置の判別に基づきチャンネルCH1〜CH5の何れかを選択する制御を行う。
この実施形態のメリットは、操作部材40により磁石部材36をスライドしても、常に磁石部材36のN極が磁気検出部28に相対して、磁気検出部28のホール素子を通過する磁気ベクトルが常に電流方向に対して垂直方向となり、磁気ベクトルの傾きがほとんど発生しないことから、磁石部材36との距離の増加に対し略直線的に低下する直線性の高い磁気検出信号が得られ、閾値の設定による切替位置の判別を正確にでき、その結果、切替位置の数を容易に増加可能とする。
[本発明の変形例]
上記の実施形態は操作装置を設ける防水型機器として、無線式の防水型感知器を例に取るものであったが、外部からの設定部材の操作で内部の電気回路を非接触に各種の設定を行う適宜の防水型機器につき、そのまま適用することができる。
上記の実施形態は操作装置を設ける防水型機器として、無線式の防水型感知器を例に取るものであったが、外部からの設定部材の操作で内部の電気回路を非接触に各種の設定を行う適宜の防水型機器につき、そのまま適用することができる。
また、上記の実施形態に示したロータリー型及びスライド型の操作装置は、密閉構造をもつ筐体に収納した電気回路に対し外部操作により操作を指示するための汎用スイッチ装置として構成しても良い。
また、本発明は、その目的と利点を損なうことのない適宜の変形を含み、更に上記の実施形態に示した数値による限定は受けない。
10:防水型感知器
12:カバー
15:LED
16:温度検出部
18:防水筐体本体
20:防水筐体カバー
24,26:回路基板
28:磁気検出部
30A,30B,30C:操作装置
31:収納穴
32,40:操作部材
32c,40c:位置決め突起
35a〜35e,46a〜46e:位置決め凹部
34,42:カバー部材
36:磁石部材
50:強磁性体
51:反磁性体
60:制御部
62:通信部
66:センサ部
68:表示部
70:電池電源
12:カバー
15:LED
16:温度検出部
18:防水筐体本体
20:防水筐体カバー
24,26:回路基板
28:磁気検出部
30A,30B,30C:操作装置
31:収納穴
32,40:操作部材
32c,40c:位置決め突起
35a〜35e,46a〜46e:位置決め凹部
34,42:カバー部材
36:磁石部材
50:強磁性体
51:反磁性体
60:制御部
62:通信部
66:センサ部
68:表示部
70:電池電源
Claims (10)
- 筐体の内部に電気回路を配置した機器に設ける操作装置に於いて、
前記筐体の外側に配置され、磁石部材を複数の切替位置に移動する操作部材と、
前記筐体の内部に配置され、前記操作部材により移動する前記磁石部材の磁気の強さに応じた磁気検出信号を出力する磁気検出部と、
前記磁気検出部から出力する前記磁気検出信号に基づいて前記操作部材の切替位置を示す切替信号を前記電気回路に出力して制御する制御部と、
を備えたことを特徴とする操作装置。
- 請求項1記載の操作装置に於いて、前記制御部は、前記切替信号に基づいて前記電気回路を制御した場合に、前記操作部材による切替内容を表示部に表示させることを特徴とする操作装置。
- 請求項1記載の操作装置に於いて、
前記磁気検出部は、前記磁石部材の磁気の方向に応じた極性と磁気の強さに応じたレベルの磁気検出信号を出力し、
前記制御部は、前記磁気検出信号の極性とレベルに基づいて前記操作部材の切替位置を示す切替信号を出力することを特徴とする操作装置。
- 請求項1に記載の操作装置に於いて、前記操作部材は前記複数の切替位置に移動した場合に切替位置を保持する位置決め機構を備えたことを特徴とする操作装置。
- 請求項1記載の操作装置に於いて、前記操作部材は前記磁石部材を回転して複数の切替え位置に移動することを特徴とする操作装置。
- 請求項5記載の操作装置に於いて、
前記磁石部材は棒状であり、前記操作部材は、前記磁石部材の両端の磁極面を通る磁力線に直交する回転軸により回転自在に配置し、
前記磁気検出部は、前記磁石部材の回転面上の磁極面回転位置の外側の所定位置に配置し、
前記制御部は、前記磁石部材の一方の磁極面が前記磁気検出部に相対した初期位置から前記磁石部材の他方の磁極面が前記磁気検出部に相対するまでの180°の回転範囲に設定した所定角度ごとの複数の切替位置を示す切替信号 を前記電気回路に出力して制御することを特徴とする操作装置。
- 請求項5記載の操作装置に於いて、
前記磁石部材は棒状であり、前記操作部材は、前記磁石部際の両端の磁極面を通る磁力線に直交する回転軸により回転自在に配置すると共に、前記回転軸による前記磁石部材の回転面上の前記両端の磁極面を通る磁力線に直交する所定位置に前記磁石部材と一体に回転する磁性体を配置し、
前記磁気検出部は、前記磁石部材の回転面上の磁極面回転位置の外側の所定位置に配置し、
前記制御部は、前記磁石部材の一方の磁極面が前記磁気検出部に相対した初期位置から他方の磁極面が前記磁気検出部に相対するまでの180°の前記磁性体による影響を受けない第1回転範囲に設定した所定角度ごとの複数の切替位置を示す切替信号及び残り180°の前記磁性体の影響を受ける第2回転範囲に設定した前記第1設定範囲の切替信号とレベルの異なる所定角度の複数の切替位置を示す切替信号の各々を、前記電気回路に出力して制御することを特徴とする操作装置。
- 請求項5記載の操作装置に於いて、
前記磁石部材は棒状であり、前記操作部材は、前記磁石部際の両端の磁極面を通る磁力線に直交する回転軸により回転自在に配置すると共に、前記回転軸による前記磁石部材の回転面上の前記両端の磁極面を通る磁力線に直交する所定位置に前記磁石部材と一体に回転する強磁性体と反磁性体を回転軸心を挟んで相対配置し、
前記磁気検出部は、前記磁石部材の回転面上の磁極面回転位置の外側の所定位置に配置し、
前記制御部は、前記磁石部材の一方の磁極面が前記磁気検出部に相対した初期位置から他方の磁極面が前記磁気検出部に相対するまでの180°の前記反磁性体による影響を受ける第1回転範囲に設定した所定角度ごとの複数の切替位置を示す切替信号及び残り180°の前記強磁性体の影響を受ける第2回転範囲に設定した前記第1設定範囲の切替信号とレベルの異なる所定角度の複数の切替位置を示す切替信号の各々を、前記電気回路に出力して制御することを特徴とする操作装置。
- 請求項5記載の操作装置に於いて、
前記磁石部材は棒状であり、前期操作部材は、前記磁石部材の両端の磁極面を通る磁力線に直交する回転軸により回転自在に配置し、
前記磁気検出部は、前記磁石部材の回転面上の磁極面回転位置の外側の異なる2箇所の所定位置に配置し、
前記制御部は、前記磁石部材の1回転における所定角度毎の前記2箇所に配置した前記磁気検出器の異なる検出信号の組合せによる複数の切替位置を示す切替信号を前記電気回路に出力して制御することを特徴とする操作装置。
- 請求項1記載の操作装置に於いて、前記操作部材は前記磁石部材をスライドして複数の切替位置に移動することを特徴とする操作装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014233198A JP2016100043A (ja) | 2014-11-18 | 2014-11-18 | 操作装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014233198A JP2016100043A (ja) | 2014-11-18 | 2014-11-18 | 操作装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2016100043A true JP2016100043A (ja) | 2016-05-30 |
Family
ID=56077300
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014233198A Pending JP2016100043A (ja) | 2014-11-18 | 2014-11-18 | 操作装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2016100043A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109326476A (zh) * | 2019-01-03 | 2019-02-12 | 南昌黑鲨科技有限公司 | 拨动开关装置及电子设备 |
| CN110581041A (zh) * | 2019-08-27 | 2019-12-17 | 陈连珀 | 一种用于家用电器的旋钮组件 |
| JP2021135088A (ja) * | 2020-02-25 | 2021-09-13 | シャープ株式会社 | 通信装置、通信システム、及び通信装置の操作方法 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61290619A (ja) * | 1985-06-19 | 1986-12-20 | 松下電器産業株式会社 | 機器の入力装置 |
| JPH08502820A (ja) * | 1992-09-03 | 1996-03-26 | マイクロトロニック アクティーゼルスカブ | 小型電子位置センサ |
| JPH11325956A (ja) * | 1998-05-22 | 1999-11-26 | Sensor Tec Kk | 無接触可変電圧器 |
| JP2006047120A (ja) * | 2004-08-05 | 2006-02-16 | Sensatec Co Ltd | 無接触可変電圧器 |
| JP2007214045A (ja) * | 2006-02-10 | 2007-08-23 | Sony Corp | 無接点スイッチとそれを用いた記録メディアおよび操作部材 |
-
2014
- 2014-11-18 JP JP2014233198A patent/JP2016100043A/ja active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61290619A (ja) * | 1985-06-19 | 1986-12-20 | 松下電器産業株式会社 | 機器の入力装置 |
| JPH08502820A (ja) * | 1992-09-03 | 1996-03-26 | マイクロトロニック アクティーゼルスカブ | 小型電子位置センサ |
| JPH11325956A (ja) * | 1998-05-22 | 1999-11-26 | Sensor Tec Kk | 無接触可変電圧器 |
| JP2006047120A (ja) * | 2004-08-05 | 2006-02-16 | Sensatec Co Ltd | 無接触可変電圧器 |
| JP2007214045A (ja) * | 2006-02-10 | 2007-08-23 | Sony Corp | 無接点スイッチとそれを用いた記録メディアおよび操作部材 |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109326476A (zh) * | 2019-01-03 | 2019-02-12 | 南昌黑鲨科技有限公司 | 拨动开关装置及电子设备 |
| WO2021012716A1 (zh) * | 2019-01-03 | 2021-01-28 | 上海众链科技有限公司 | 拨动开关装置及电子设备 |
| CN110581041A (zh) * | 2019-08-27 | 2019-12-17 | 陈连珀 | 一种用于家用电器的旋钮组件 |
| CN110581041B (zh) * | 2019-08-27 | 2021-10-22 | 陈连珀 | 一种用于家用电器的旋钮组件 |
| JP2021135088A (ja) * | 2020-02-25 | 2021-09-13 | シャープ株式会社 | 通信装置、通信システム、及び通信装置の操作方法 |
| JP7412218B2 (ja) | 2020-02-25 | 2024-01-12 | シャープ株式会社 | 通信装置、通信システム、及び通信装置の操作方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101858634B1 (ko) | 홀 센서를 이용한 센싱 시스템 및 이를 이용한 장치 | |
| RU2007147009A (ru) | Установка температуры пищи с помощью беспроводных технологий | |
| CN106781144B (zh) | 磁传感器 | |
| RU2011134625A (ru) | Электронное устройство | |
| CN106068043B (zh) | 电磁加热烹饪系统及其功率调节装置 | |
| JP2016100043A (ja) | 操作装置 | |
| KR20150041718A (ko) | 디스플레이 단말에서 센서의 배치 방법 | |
| US10274304B2 (en) | Method for controlling an electrical device and an electrical device | |
| US10823584B2 (en) | Intelligent device having detachable bodies | |
| JP2014160009A (ja) | 回転速度検出装置 | |
| JP2016033512A5 (ja) | ||
| TWI626429B (zh) | 感測器、組裝感測器的方法和感測系統 | |
| CN101728110A (zh) | 旋转开关及具有该旋转开关的角度侦测装置 | |
| CN204991595U (zh) | 非接触式磁感应旋转开关 | |
| US20150008911A1 (en) | Apparatus for sensing current from electrical appliances | |
| US20060001512A1 (en) | Rotary control for a communication device | |
| JP2012007947A (ja) | コンセント用計測装置 | |
| US10416332B2 (en) | Conductor tracing instruments | |
| JP2021025805A (ja) | 回転角度検出センサ | |
| CN212628474U (zh) | 磁感应电路、磁控开关电路、电路板、磁控装置及磁控灯 | |
| JP6430786B2 (ja) | 防水型機器 | |
| JP3223244U (ja) | 電流検出モジュールおよび電流テスター装置 | |
| RU178417U1 (ru) | Магнитный структуроскоп | |
| CN106949911A (zh) | 手持轮式测距仪 | |
| CN206618427U (zh) | 手持轮式测距仪 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170825 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180511 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180620 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20190109 |