JP2016107382A - ロボット - Google Patents
ロボット Download PDFInfo
- Publication number
- JP2016107382A JP2016107382A JP2014248954A JP2014248954A JP2016107382A JP 2016107382 A JP2016107382 A JP 2016107382A JP 2014248954 A JP2014248954 A JP 2014248954A JP 2014248954 A JP2014248954 A JP 2014248954A JP 2016107382 A JP2016107382 A JP 2016107382A
- Authority
- JP
- Japan
- Prior art keywords
- arm
- axis
- robot
- braking mechanism
- braking
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images

















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/02—Program-controlled manipulators characterised by movement of the arms, e.g. cartesian coordinate type
- B25J9/04—Program-controlled manipulators characterised by movement of the arms, e.g. cartesian coordinate type by rotating at least one arm, excluding the head movement itself, e.g. cylindrical coordinate type or polar coordinate type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J17/00—Joints
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J18/00—Arms
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/10—Program-controlled manipulators characterised by positioning means for manipulator elements
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Manipulator (AREA)
Abstract
【課題】小型化を図ること。【解決手段】実施形態に係るロボットは、第1アームと、第2アームと、制動機構とを備える。第1アームは、第1軸まわりに回転可能に設けられる。第2アームは、第1アームに対し、第2軸まわりに揺動可能に連結される。制動機構は、第1アームにおいて基端部と先端部との間に設けられ、第2アームを制動する。また、第2アームを回転駆動する第2アクチュエータをさらに備え、第1アームの延伸向きと直交する幅方向に、第2アクチュエータ、第2アームおよび制動機構の並びで配置される。【選択図】図4
Description
開示の実施形態は、ロボットに関する。
従来、ロボットは、電源が遮断されるなどの非通電の場合にアームが自重によって位置ずれを起こすことを防止するようアームの揺動を制動するブレーキ(以下、「制動機構」という)を備えることが知られている。このような制動機構には、アームを駆動するアクチュエータに内蔵されるものの他、アクチュエータの外側に並設されるものがある(たとえば、特許文献1参照)。
しかしながら、上述した従来技術では、アクチュエータを小型化しようとして制動機構のない小型アクチュエータを用いたとしても小型アクチュエータに並設された制動機構がアクチュエータ周辺にかさばり結果的にロボットが大型化してしまうという問題がある。
実施形態の一態様は、上記に鑑みてなされたものであって、小型化を図ることができるロボットを提供することを目的とする。
実施形態の一態様に係るロボットは、第1アームと、第2アームと、制動機構とを備える。前記第1アームは、第1軸まわりに回転可能に設けられる。前記第2アームは、前記第1アームに対し、第2軸まわりに揺動可能に連結される。前記制動機構は、前記第1アームにおいて基端部と先端部との間に設けられ、前記第2アームを制動する。
実施形態の一態様によれば、小型化を図ることができる。
以下、添付図面を参照して、本願の開示するロボットの実施形態を詳細に説明する。なお、以下に示す実施形態によりこの発明が限定されるものではない。
まず、図1を参照して実施形態に係るロボットの概要について説明する。図1は、実施形態に係るロボットの概要説明図である。なお、図1では、ロボット(たとえば、垂直多関節型ロボット)における任意の2つの軸を図示しており、図中下方に位置する軸を第1軸、図中上方に位置する軸を第2軸と規定している。
また、図1には、説明を分かりやすくするために、鉛直上向きを正方向とするZ軸を含む3次元の直交座標系を図示している。さらに、図1には、図中左方にロボットをY軸の負方向から正方向へと見た場合、図中右方にロボットをX軸の正方向から負方向へと見た場合を図示している。
図1に示すように、ロボット10は、第1アーム13と、第2アーム14と、制動機構30とを備える。なお、図1では、第1アームを、ロボット10の下部アーム13とし、第2アームを、下部アーム13に連結される上部アーム14としている。
第1アーム13は、第1軸AX1まわりに回転可能に設けられる。ここで、「回転」には、「旋回」および「揺動」がある。以下では、ある部材が、その部材自体を延在方向へ貫く回転軸まわりに自転するように回転する場合を「旋回」と呼び、端部を幅方向へ貫く回転軸まわりに公転するように回転する場合を「揺動」と呼ぶこととする。なお、「旋回」および「揺動」をまとめて「回転」と呼ぶこともある。ここで、第1アームを下部アーム13とする場合、第1アーム13は、後述する旋回アーム12(図2参照)に対して第1軸AX1、すなわち、後述する軸L(図2参照)まわりに「揺動」可能に連結されることとなる。
また、第2アーム14は、第1アーム13に対し、第2軸AX2まわりに「揺動」可能に連結される。制動機構30は、第2アーム14の揺動を制動する。制動機構30は、第1アーム13において第1アーム13の基端部13aと先端部13bとの間に、第2アーム14の基端部14a側を臨むように設けられる。
このように、制動機構30が、第1アーム13の基端部13aと先端部13bとの間のいわゆるデッドスペースに設けられることで、各アーム13,14の嵩張りを抑えることができる。これにより、制動機構30による安全性を確保しつつ、ロボット10の小型化を図ることができる。
なお、実施形態に係るロボット10では、第2アーム14、制動機構30および第2アーム14を回転駆動、すなわち、揺動駆動する第2アクチュエータM2(図4参照)を、図1に示す第2軸AX2に沿う向きについて第2アクチュエータM2、第2アーム14および制動機構30の並びで配置した。また、制動機構30を、第1アーム13の先端部13b側に形成された空間部131(図4参照)において第1アーム13の基端部13a側に設けた。さらに、第2アクチュエータM2を、第1アーム13の先端部13bにおいて空間部131とは反対側の面に設けた。かかる構成については図4などを用いて後述する。
また、実施形態に係るロボット10では、制動機構30に、第2軸AX2に対して進退する直動向きが第1アーム13の延伸向きに沿った可動部32(図4参照)を設けた。また、第2アーム14の基端部14aに複数の突起141a(図4参照)を設け、制動機構30に可動部32をガイドするガイド部312(図4参照)を設けた。かかる構成についても図4などを用いて後述する。さらに、制動機構30自体を揺動可能としたが、かかる構成については図5Aおよび図5Bを用いて後述する。
次に、図2、図3Aおよび図3Bを参照して実施形態に係るロボット10の全体構成について説明する。
まず、図2を参照してロボット10の概略構成について述べる。図2は、ロボット10の全体斜視図である。なお、以下では、説明の便宜上、ロボット10の旋回位置および姿勢が基本的に図2に示す状態にあるものとして、ロボット10における各部位の位置関係を説明する。また、かかる図2に示す状態の姿勢を、ロボット10の「基本姿勢」と呼ぶ場合がある。
また、図2には、図1と同様、説明を分かりやすくするために、鉛直上向きを正方向とするZ軸を含む3次元の直交座標系を図示している。かかる直交座標系は、以下の説明で用いる他の図面においても示す場合がある。なお、本実施形態では、X軸の正方向がロボット10の正面方向を指すものとする。
また、ロボット10における各部材の連結関係において、図2に示す基台部11が据え付けられる取付面側を「基端側」と呼び、フランジ部17側を「先端側」と呼ぶ。そのうえで、各部材における基端側周辺を「基端部」と呼び、各部材における先端側周辺を「先端部」と呼ぶ。
図2に示すように、ロボット10は、いわゆるシリアルリンクの垂直多関節型であり、軸S、軸L、軸U、軸R、軸Bおよび軸Tの6個の回転関節軸を有する。
また、ロボット10は、基台部11と、旋回アーム12(以下、旋回アーム15と区別するために旋回ベースと呼ぶ)と、下部アーム13と、上部アーム14と、旋回アーム15と、揺動部16と、フランジ部17とを備える。なお、下部アーム13は第1アームの一例であり、上部アーム14は第2アームの一例であり、旋回アーム15は第3アームの一例である。
また、ロボット10は、ケーブルガイド18,19を備える。なお、ケーブルガイド19は、第2ケーブルガイドの一例である。
基台部11は、床面などの取付面に固定されるベース(固定ベース)の一例であり、旋回ベース12を軸Sまわりに旋回可能に支持する(図中の矢印101参照)。旋回ベース12は、下部アーム13の基端部13aを軸Sに垂直な軸Lまわりに揺動可能に支持する(図中の矢印102参照)。
下部アーム13は、その先端部13bにおいて、上部アーム14の基端部14aを軸Lに平行な軸Uまわりに揺動可能に支持する(図中の矢印103参照)。上部アーム14は、その先端部14bにおいて、旋回アーム15の基端部を軸Uに垂直な軸Rまわりに旋回可能に支持する(図中の矢印104参照)。
旋回アーム15は、その先端部において、揺動部16の基端部を軸Rに垂直な軸Bまわりに揺動可能に支持する(図中の矢印105参照)。揺動部16は、その先端部において、フランジ部17を軸Bに垂直な軸Tまわりに旋回可能に支持する(図中の矢印106参照)。なお、フランジ部17には、図示略のロボットハンドなどが取り付けられる。
ここで、上述した「垂直」あるいは「平行」などは、必ずしも数学的に厳密な精度を必要とするものではなく、実質的な公差や誤差などを許容するものである。また、「垂直」は、2つの直線(回転軸)が同一平面上で直交することのみを意味するのではなく、2つの直線(回転軸)の関係がねじれの位置である場合をも含むものとする。
ケーブルガイド18は、旋回アーム15に対する上部アーム14の背面側から旋回アーム15へ架け渡されて、旋回アーム15とともに軸Rまわりに上部アーム14の周囲を回転可能に設けられる(図中の矢印107参照)。
かかるケーブルガイド18は、中空構造であり、その内部にはロボット10の機内配線であるケーブル20(図3Aおよび図3B参照)が収容されて配線される。なお、ここに言う中空構造は、完全な中空を意味するものではなく、たとえば、延在方向に沿って設けられた切り込みによって外部と通じた構造であってもよい。
このように、本実施形態では、ケーブル20を、小型化を図ればよりスペースが限られてしまうロボット10の内部へ配線せずに、あえてロボット10の外部へ配線することとした。たとえば、本実施形態では、軸Rの周囲を通るケーブル20については、上述したように、旋回アーム15とともに軸Rまわりに上部アーム14の周囲を回転するケーブルガイド18へ収容しつつ配線することとした。
これにより、ロボット10の内部スペースが限られる場合であっても、旋回アーム15の軸Rまわりの旋回運動を妨げることなく、また、この旋回運動によって無用な負荷を受けることなく、ケーブル20をロボット10の外部へ配線することができる。
また、ケーブル20をケーブルガイド18へ収容することでケーブル20が露出しないので、ケーブル20が周囲に干渉することを防ぐとともに、ケーブル20が露出することでロボット10の占有スペースが肥大化するのを防ぐことができる。すなわち、本実施形態によれば、ロボット10をより小型化させることができる。
一方で、ケーブルガイド19は、ケーブルガイド18と立体交差するように上部アーム14の基端側から先端側へ湾曲しつつ架け渡される。かかるケーブルガイド19は、ケーブルガイド18と同様に中空構造であり、旋回アーム15へ配線されるケーブル20が収容される。
このように、本実施形態では、ケーブル20を複数のケーブルガイド18,19に収容し、うち一つのケーブルガイド18を回転可能にした場合に、かかるケーブルガイド18に対してケーブルガイド19を湾曲させつつ立体交差させることとした。
これにより、ケーブルガイド18を回転可能としつつも、かかるケーブルガイド18およびケーブルガイド19を狭小な配置スペースに密集させて配置することができる。すなわち、本実施形態によれば、ロボット10をより小型化させることができる。
以下、図3Aおよび図3Bを用いて、実施形態に係るロボット10のより具体的な構成について順次説明する。まず、ロボット10におけるケーブル20の基本的な配線構成について説明する。図3Aおよび図3Bは、ロボット10の内部構造を示す斜視透視図である。詳細には、図3Aおよび図3Bは、ロボット10におけるケーブル20の基本的な配線構成を示す斜視透視図である。
ここでの説明に先立って、ケーブル20の概略について述べておく。ロボット10の機内配線であるケーブル20は、たとえば、ロボット10の各軸を回転させる駆動源へ接続される電源ケーブルや制御ケーブルなどである。なお、本実施形態では、軸Sおよび軸Lそれぞれの駆動源が、中空部を有する中空モータであるものとして説明を進める。
図3Aおよび図3Bに示すように、ケーブル20は、基台部11から旋回ベース12にかけては、軸Sが通る中空部を介して配線される。また、ケーブル20は、旋回ベース12から下部アーム13にかけては、軸Lが通る中空部を介して配線される。
また、ケーブル20は、下部アーム13から上部アーム14にかけては、下部アーム13内部を配線されてケーブルガイド19へ収容され、かかるケーブルガイド19を介して軸Rまわりへ導かれるように配線される。なお、ケーブル20は、ケーブルガイド19手前の軸Uまわりの関節部においては、かかる軸Uの軸方向を向いた螺旋状に配線される。
上部アーム14から旋回アーム15にかけては、ケーブル20は、旋回アーム15に対する上部アーム14の背面側から上述の回転可能なケーブルガイド18に収容されて配線される。なお、ケーブル20は、上述した旋回アーム15に対する上部アーム14の背面側においては、軸Rの軸方向を向いた螺旋状に配線される。
また、ケーブル20は、旋回アーム15から揺動部16にかけては、旋回アーム15の内部を配線される。また、ケーブル20は、軸Bまわりの関節部においては、かかる軸Bの軸方向を向いた螺旋状に配線される。そして、揺動部16からフランジ部17にかけては、ケーブル20は、揺動部16の内部を配線される。
なお、上述したように、軸U、軸Rおよび軸Bまわりの各関節部においてケーブル20を螺旋状に配線することで、これら関節部の薄型化を図ることができる。すなわち、ロボット10をより小型化させることができる。
また、図3Aおよび図3Bに示すように、ロボット10は、たとえば、下部アーム13の基端部13aと先端部13bとの間に、上部アーム14を制動する制動機構30を備える。次に、図4以降を参照して制動機構30について詳細に説明する。
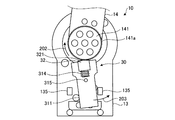
図4は、制動機構30の斜視図である。制動機構30は、第1アームである下部アーム13側から第2アームである上部アーム14に対して作用することで、第2アーム14の揺動を制動するものである。
ロボット10には、動作停止した場合に非通電で各アームを制動するブレーキが用いられる。たとえば、下部アーム13および上部アーム14のように、軸L(図2参照)および軸Uまわりに揺動可能に設けられるアーム13,14は、自重によって傾倒することがある。このため、安全面の観点からも非通電でアームを制動するブレーキを設けることが好ましい。
第2アーム(たとえば、上部アーム14)を制動対象とする場合、第2アーム14を揺動駆動する駆動源としては、従来は、たとえば、ブレーキが内蔵されたサーボモータを採用していた。しかしながら、ブレーキ内蔵のサーボモータは大型であるため、ロボットが大型化しやすい。このため、ブレーキ非内蔵型の小型アクチュエータを用いることでロボットの小型化を図りたい。ところが、アクチュエータとは別体のブレーキをアームに対して設けると、アームの外形が嵩張ってしまい、結果的にロボットが大型化してしまう。
そこで、本実施形態では、第2アーム14の揺動を制動する制動機構30を、第1アーム13の内部に設けることとした。具体的には、図4に示すように、制動機構30は、第1アームである下部アーム13の基端部13aと先端部13bとの間に設けられる。ここで、第1アームである下部アーム13は、その先端部13bの一部が切り欠かれて形成される空間部131を有する。
空間部131は、側壁132と、底壁133とで略区画されて形成される切欠き状の空間である。側壁132は、下部アーム13の先端部13bにおいて、下部アーム13の延伸向きに突出して設けられる。また、底壁133は、下部アーム13の延伸向きと略直交する幅方向に広がる面であり、かつ、空間部131から見た場合に下部アーム13の基端部13a側に位置する。かかる空間部131には、第2アームである上部アーム14の基端部14aが配置される。また、下部アーム13の基端部13aと先端部13bとの間に設けられる制動機構30は、かかる空間部131における基端部13a側に設けられる。
また、下部アーム13は、基端部13aにおいて、上述した空間部131とは別の空間部134を有する。かかる空間部134には、旋回ベース12の先端部が配置される。さらに、旋回ベース12と下部アーム13との連結部分には、軸L(図2参照)の同軸上に下部アーム13を揺動駆動する駆動源となる第1アクチュエータM1(たとえば、サーボモータ)が設けられる。
また、下部アーム13の先端部13bにおいて、側壁132において空間部131とは反対側の面には、上部アーム14を揺動駆動する駆動源となる第2アクチュエータM2(たとえば、サーボモータ)が設けられる。
また、空間部131に配置される上部アーム14の基端部14aには、第2軸AX2(図1参照)である軸Uの同心円上において少なくとも上部アーム14の揺動範囲にわたって複数の突起141aが並設される。図4の例では、軸Uと同軸で複数の突起(歯)141aを有するギヤ部141が設けられる。かかるギヤ部141は、上部アーム14の基端部14aと一体的に設けられる。制動機構30は、下部アーム13の内部において、底壁133側から上部アーム14の基端部14aを臨むように設けられる。
第2アクチュエータM2および制動機構30は、上部アーム14の基端部14aを間に位置させるように設けられる。すなわち、上部アーム14、第2アクチュエータM2および制動機構30は、下部アーム13の延伸向きと略直交する幅方向、詳しくは、第2軸である軸Uに沿う向きについて第2アクチュエータM2、上部アーム14および制動機構30の並びで配置される。
制動機構30は、固定部31と、可動部32とを備える。固定部31は、図4の例では、矩形状の本体311の内部にソレノイド316(図9(制動駆動部)参照)を有する。本体311の先端側には、軸Uと平行な方向視において、後述する可動部32を両側から挟み込むことで、可動部32の直動をガイドするガイド部312が設けられる。可動部32は、たとえば、ソレノイド316のプランジャ313を介して直動可能に設けられるとともに、第2軸AX2(図1参照)である軸Uに対して略直交するように進退する直動向きが、下部アーム13の延伸向きに沿うように設けられる。
可動部32の先端部には、上述した突起、すなわち、ギヤ部141の歯141aに対して係合可能な爪321が設けられる。なお、図4の例では、爪321は、ギヤ部141の歯141aの並び方向と同じ方向に等ピッチで複数設けられる。また、可動部32と本体311との間には、バネなどの付勢部材314が配設される。可動部32は、付勢部材314によって下部アーム13の基端部13a側へ向けて付勢される。
制動機構30では、ソレノイド316(図9参照)が通電状態にある場合には可動部32を付勢部材314の付勢力に抗して下部アーム13の基端部13a側へ引き付けている。そして、制動機構30では、ソレノイド316が非通電状態になると、付勢部材314によって可動部32をギヤ部141へ向けて押し出す。これにより、ギヤ部141の歯141aと可動部32の爪321とが係合する。このように、ギヤ部141の歯141aと可動部32の爪321とが係合することで、上部アーム14を制動することができる。また、かかる制動に必要な駆動力は可動部32を下部アーム13の基端部13a側へ引き付けておくだけの力でよいため、制動のために大きな駆動力が不要となる。これにより、省力化を図ることができる。
また、制動機構30では、本体311が、第2軸である軸Uと平行な回転軸を有する揺動シャフト315まわりにフリー状態で揺動可能に設けられる。また、制動機構30は、下部アーム13の空間部131において本体311の両側に配置された規制部135によって、揺動範囲が規制される。なお。本実施形態では、制動機構30自体を揺動させる構成を例示したが、かかる構成を省略してもよい。
ここで、図5Aおよび図5Bを参照して制動機構30の動作について説明する。図5Aおよび図5Bは、制動機構30の動作説明図である。図5Aに示すように、ロボット10を停止させるなど非通電状態となると、制動機構30では、付勢部材314による可動部32の引き付けが解除される。これにより、可動部32は、図中の矢印201で示すように、上部アーム14の基端部14aのギヤ部141側へと押し出され、ギヤ部141の歯141aと可動部32の爪321とが係合する。
図5Bに示すように、たとえば、上部アーム14が図中の矢印202の方向へ揺動する場合、本体311は、ギヤ部141の歯141aから受けるトルクによって、揺動シャフト315を介して上部アーム14の揺動に連れ回り、図中の矢印203の方向へ揺動する。この場合、本体311の揺動は、規制部135によって規制される。
このように、制動機構30の本体311が所定の揺動範囲を揺動することで、可動部32の爪321が本体311の揺動方向に沿って傾いた状態でギヤ部141の歯141aと係合する。そして、可動部32の爪321が傾くことで、ギヤ部141の歯141aとの接触角θ(図6A参照)が小さくなる。ここで、図6Aおよび図6Bを参照して制動条件、詳細には、ギヤ部141の歯141aと可動部32の爪321との接触角θについて説明する。
図6Aおよび図6Bは、制動機構30における制動条件の説明図である。図6Aに示すように、ギヤ部141(図4参照)の歯141aと可動部32の爪321とが係合状態にある場合、爪321が受ける応力F1および応力F2は、それぞれ式1および式2から得られる。
F1=Tu/Rgcosθ・・・(式1)
F2=μg(Tu/Rg)cosθ・・・(式2)
F1=Tu/Rgcosθ・・・(式1)
F2=μg(Tu/Rg)cosθ・・・(式2)
また、制動機構30は、可動部32の押圧力Fが式3の条件を満たすことで制動力を発揮することができる。
F>Tu/Rgcosθ*X・・・(式3)
F>Tu/Rgcosθ*X・・・(式3)
なお、上記式1〜式3において、Tuは爪321が受けるトルク、Rgはギヤ部141の半径である。また、Xは、式4から得られる。
X=sinθ−μst(cosθ+μgsinθ)−μgcosθ・・・(式4)
X=sinθ−μst(cosθ+μgsinθ)−μgcosθ・・・(式4)
なお、上記式4において、μstは爪321とガイド部312との間の摩擦係数、μgは歯141aと爪321との間の摩擦係数である。そして、押圧力Fが小さくても上記式4から得られるXの値が負である場合に上記式3のような関係式が成り立つ。
また、図6Bには、上記Xと接触角θ(図6A参照)との関係を摩擦係数ごとに示している。なお、図6Bでは、μstとμgとは等しいとする。たとえば、図6Bに示すように、摩擦係数が0.1で接触角θが10°以下の場合にXは負の値となる。この場合、制動機構30は、制動条件を満たし、上部アーム14(図4参照)の揺動を制動することができる。すなわち、接触角θを小さくする(たとえば、10°以下とする)ことで、制動機構30はその機能を発揮することができる。
上述した実施形態に係るロボット10によれば、制動機構30が、第1アームである下部アーム13の基端部13aと先端部13bとの間のいわゆるデッドスペースに設けられ、下部アーム13および第2アームである上部アーム14の嵩張りを抑えることができる。また、たとえば、第2軸である軸Uの駆動源にブレーキ非内蔵型のアクチュエータ(第2アクチュエータM2)を用いても、制動機能を得ることができる。これにより、制動機構30を備えて安全性を確保しつつ、ロボット10の小型化を図ることができる。
また、第1アームである下部アーム13の幅方向に、第2アクチュエータM2、第2アームである上部アーム14および制動機構30の並びで配置することで、ロボット10の正面側から見た(たとえば、図2においてX軸の負方向を見た)場合のロボット10の幅を小さくすることができる。
また、制動機構30を、第1アームである下部アーム13の先端部13b側に形成された空間部131において下部アーム13の基端部13a側に設けることで、制動機構30が下部アーム13のいわゆるデッドスペースに設けられることとなる。これにより、下部アーム13は、正面側から見た場合のスリム化を図ることができ、この結果、ロボット10の小型化を図ることができる。
また、第2アクチュエータM2を、第1アームである下部アーム13の先端部13bにおいて空間部131とは反対側の面に設けることで、第2アクチュエータM2と制動機構30とが同位置に配置されることを避けることができる。これにより、下部アーム13の小型化を図ることができ、この結果、ロボット10の小型化を図ることができる。
また、制動機構30に、第2軸である軸Uに対して進退する可動部32を設けることで、直動のための小さな駆動力で制動に必要な大きなトルクを得ることができる。これにより、制動駆動部316となるソレノイドなどを小型化することができ、この結果、ロボット10の小型化を図ることができる。
また、第2アームである上部アーム14の基端部14aに突起(ギヤ部141の歯141a)を設け、制動機構30に可動部32をガイドするガイド部312を設けることで、歯141aに対して可動部32を直動させるという簡単な機構による制動が可能となる。これにより、ロボット10の小型化を図ることができる。
また、制動機構30を揺動可能に設けることで、第2アームである上部アーム14の基端部14aの突起(ギヤ部141の歯141a)によるトルクが可動部32の爪321へ加わると制動機構30が傾き、歯141aと爪321との接触角θが小さくなる。これにより、制動機構30の制動性能を向上させることができる。
なお、上述した実施形態に係るロボット10では、第1アームを下部アーム13、第2アームを上部アーム14としたが、これに限定されず、第1アームを旋回する旋回アーム(旋回ベース)12、第2アームを下部アーム13としてもよい。この場合、第1アームである旋回ベース12は軸Sまわりに旋回し、第2アームである下部アーム13は軸Lまわりに揺動し、制動機構30は下部アーム13の揺動を制動することとなる。
ここで、図7および図8を参照して、第1アームを旋回ベース12、第2アームを下部アームとして、制動機構30を下部アームの揺動の制動に適用する場合の構成例について説明する。図7および図8は、制動機構30の他の例(制動機構40,50)の説明図である。なお、以下の説明において、上述した実施形態に係るロボット10における制動機構30と同一または同等の箇所には同一の符号を付し、その説明を省略する場合がある。
図7に示すように、制動機構40は、第1軸である軸Sまわりに旋回可能な第1アームである旋回ベース12の内部に形成された空間部41に配設される。また、第2アームである下部アームの基端部には、第2軸である軸Lの同軸上にギヤ部42が設けられる。
また、旋回ベース12の空間部41には、ギヤ部42と噛み合う他のギヤ部43が配設される。制動機構40は、可動部44が直動駆動によって、他のギヤ部43へ向けて進退する。この場合、可動部44は、第1軸である軸Sに対して略直交するように進退する。可動部44は、上述した実施形態に係るロボット10と同様に、先端側に爪を有しており、かかる爪が他のギヤ部43の歯と係合することで、他のギヤ部43およびギヤ部42を介して下部アームの揺動を制動する。
制動機構40は、本体45が揺動シャフト46によって図中の矢印401の方向に揺動可能に設けられる。また、本体45は、図中において本体45の上下に配設された規制部47によって揺動範囲が規制される。
このような構成によれば、制動機構40を、下部アームの揺動の制動に対して適用することができる。
また、図8に示すように、制動機構50は、第1軸である軸Sまわりに旋回可能な第1アームである旋回ベース12の内部に形成された空間部51に配設される。また、第2アームである下部アームの基端部には、第2軸である軸Lの同軸上にギヤ部52が設けられる。
また、制動機構50は、2つの可動部(第1可動部53aおよび第2可動部53b)を備える。第1可動部53aは、本体54から図中の矢印501の方向へ直動可能に設けられる。また、第1可動部53aは、リンク部55を介して第2可動部53bと連結される。第2可動部53bは、リンク部55の先端部に連結され、ギヤ部52へ向けて進退するように、図中の矢印502の方向へ直動可能に設けられる。さらに、空間部51において、第2可動部53bの両側には、第2可動部53bの直動をガイドするガイド部56が設けられる。
このような構成によれば、図7の例と同様、制動機構50を、下部アームの揺動の制動に対して適用することができる。なお、直動向きの異なる2つの可動部53a,53bを有し、リンク部55を介して連結させることで、第2可動部53bをギヤ部52へ向けて進退させることができる。
次に、図9を参照して制御装置によるロボット10の制動制御の一例について説明する。図9は、制御装置の機能ブロック図である。図9に示すように、制御装置60は、ロボット10の各部の駆動制御を行う。なお、図9には、第2アーム(上部アーム14)の駆動源である第2アクチュエータM2および制動機構30を、制御装置60による駆動制御の対象として例示しており、他の制御対象については図示を省略している。
図9に示すように、制御装置60は、制御部61と、記憶部62とを備える。また、制御部61は、動作制御部611と、検出部612と、制動制御部613とを備える。また、記憶部62は、制動制御部613から出力されたモータの位置情報621を記憶する。ロボット10は、第2アーム(上部アーム14)と、制動機構30とを備える。上述してきたように、第2アームである上部アーム14は、制動機構30による制動対象であり、上部アーム14を揺動駆動する第2アクチュエータM2(たとえば、サーボモータ)を備える。また、制動機構30は、可動部32(図4参照)を駆動するための制動駆動部316を備える。なお、図4などに示す例では、制動駆動部316には、上述したソレノイドが相当する。
制御装置60において、上部アーム14を制動する場合、動作制御部611から動作を停止する指令信号が出力される。また、検出部612には、第2アクチュエータM2からモータ位置信号が入力される。制動制御部613は、制動駆動部316へ駆動信号を出力する。これにより、制動機構30は、上部アーム14を制動する。なお、制動駆動部316がソレノイドである場合は、駆動信号は電流OFF信号である。
次に、図10A、図10Bおよび図10Cを参照して上述した実施形態に係るロボット10における制動シーケンスについて説明する。図10A、図10Bおよび図10Cは、制動シーケンスのフローチャートである。詳細には、図10Aは、通常の動作停止における制動シーケンスを示し、図10Bは、緊急の動作停止における制動シーケンスを示している。また、図10Cは、図10Aおよび図10Bにおける「サーボ停止動作」のサブルーチンを示している。なお、以下で説明する制動シーケンスは、上述した制御装置60の動作制御部611および制動制御部613から第2アクチュエータM2および制動駆動部(ソレノイド)316へ出力される指令信号によって実行される。
図10Aに示すように、ロボット10を通常どおり停止させる場合は、動作停止が開始されると、停止対象である第2アクチュエータM2を非通電にするサーボ停止動作を行う(ステップS701)ことで、動作停止が完了する。なお、「サーボ停止動作」とは、サーボOFF、すなわち、第2アクチュエータM2(サーボモータ)が非通電となることであり、「ロボット減速停止」とは、サーボモータが減速して停止することである。
また、図10Bに示すように、ロボット10を緊急に停止させる場合には、動作停止(緊急停止)が開始されると、まず、アラームを外部へ出力する(ステップS711)。次に、アラームが出力されると、第2アクチュエータM2を停止させる(ステップS712)。そして、第2アクチュエータM2を非通電にするサーボ停止動作を行う(ステップS713)ことで、動作停止が完了する。
また、図10Cに示すように、図10Aおよび図10Bにおいて共通する「サーボ停止動作」のサブルーチンは、サーボ停止動作が開始されると、まず、ブレーキ閉鎖指令として、制動制御部613は駆動指令を出力する(ステップS721)。これにより、制動駆動部(ソレノイド)316が電源OFFとなり、可動部32が動作する。ここで、可動部32の爪321とギヤ部141の歯141aとが係合状態か否かにより、その後の各部動作が異なるようになる。なお、「係合状態」とは、ギヤ部141の歯141aと歯141aとの間に可動部32の爪321が入り込んで、歯141aと爪321とが噛み合った状態をいう。したがって、「係合状態」にない場合は、歯141aと爪321とが噛み合っていないため、モータ位置が変位可能な状態にある。
上述した係合状態の場合は、ブレーキが閉鎖された状態であり、サーボ停止、すなわち、サーボ非通電とする(ステップS722)。これでサーボ停止動作が完了する。また、係合状態にない場合は、サーボ非通電としてから第2アーム(たとえば、上部アーム14)の状態によりさらに場合分けされ、第2アーム14の状態に応じて次のように推移する。
まず、第2アーム14が動く状態であれば、第2アーム14が自重によって係合状態となる位置まで回動することで係合状態となり(ブレーキが閉鎖され)、サーボ停止動作が完了する。また、たとえば、減速機などの摩擦によって上部アーム14が動かない状態であれば、係合状態ではないが上部アーム14は静止しているため、サーボ停止動作が完了する。
このような制動シーケンスによれば、第2アーム(たとえば、上部アーム14)が動く状態では確実にブレーキが閉鎖され、第2アーム14が動かない状態ではブレーキは閉鎖しないが第2アーム14はその姿勢で静止している。このため、第2アーム14を確実に制動することができる。
次に、図11A、図11Bおよび図11Cを参照して上述した実施形態に係るロボット10における制動解除シーケンスについて説明する。図11A、図11Bおよび図11Cは、制動解除シーケンスのフローチャートである。詳細には、図11Aは、通常の制動解除シーケンスを例示している。また、図11Bおよび図11Cは、図11Aにおける「ブレーキ開放動作」のサブルーチンをそれぞれ示している。また、図11Bは、たとえば、ロボット10にエンドエフェクタが取り付けられるなどしてアーム(第2アーム14)の重心位置が不明な場合に適した例を示している。さらに、図11Cは、第2アーム14の重心位置が明らかな場合に適した例を示している。
図11Aに示すように、制動を解除する際にロボット10の動作準備が開始されると、まず、動作制御部611はサーボ動作指令信号を出力する(ステップS731)。次に、制動制御部613からの指令信号を受けて、ブレーキを開放動作する(ステップS732)。ブレーキ開放が完了すると(ステップS733)、アラームOFF状態(アラームが外部出力されていない状態)を確認し(ステップS734)、動作準備が完了する。これにより、第2アーム14の制動が解除される。
ここで、上述したように、たとえば、ロボット10にエンドエフェクタが取り付けられるなどして第2アーム14の重心位置が不明な場合、すなわち、制動を解除する際に第2アーム14が揺動方向のどちらに傾倒するかが不明な場合がある。このような場合、ブレーキ開放動作を次の手順で行う。図11Bに示すように、ブレーキ開放動作が開始されると、まず、サーボモータ位置を確認する(ステップS741)。なお、かかるモータ位置情報は、検出部612に入力される。次に、第2アーム14を所定の振幅で往復回転する(ステップS742)。
次に、ステップS742が所定時間経過したか否かを判定する(ステップS743)。ステップS743において、所定時間経過したと判定されると(ステップS743,Yes)、ブレーキ開放動作が完了する。また、ステップS743において、所定時間経過していないと判定されると(ステップS743,No)、再度ステップS742を行い、ステップS743において所定時間経過したと判定されるまでステップS742およびステップS743を繰り返す。
また、上述したように、第2アーム14の重心位置が明らかな場合、ブレーキ開放動作が開始されると、まず、サーボモータ位置を確認する(ステップS751)。なお、かかるモータ位置情報は、検出部612に入力される。次に、第2アーム14を、重力で回転する方向(以下、これを重力負荷方向と呼ぶ)とは反対の方向へ回転する(ステップS752)。なお、重力負荷方向の検出は、たとえば、制動制御部613において、検出部612に入力されたモータ位置情報に基づいて行う。そして、ステップS752が完了すると、ブレーキ開放動作が完了する。
このような制動解除シーケンスによれば、制動を解除する際に第2アーム14の重心位置が不明な場合は、第2アーム14を所定振幅で往復回転することで、係合状態における応力の偏りを解消することができる。これにより、上述した係合状態が解除され、制動解除をスムーズに行うことができる。また、制動を解除する際に第2アーム14の重心位置が明らかな場合は、第2アーム14を重力負荷方向とは反対側へ回転することで、上述した係合状態が解除され、制動解除をスムーズに行うことができる。
なお、上述した実施形態に係るロボット10では、制動機構30の可動部32に複数の爪321を設ける構成としているが、たとえば、爪321を1つだけ設ける構成としてもよい。このように、少なくとも1つの爪321があれば、突起(ギヤ部141の歯141a)との係合が可能となるため、複数の爪321の場合と同等の制動性能が得られるうえ、安価となる。
また、上述した実施形態に係るロボット10では、制動機構30は、第2アームである上部アーム14へ可動部32を直動させて上部アーム14を制動しているが、たとえば、上部アーム14にディスクを設け、制動機構30をキャリパとしてもよい。このように、ディスクキャリパを用いても、ロボット10を小型化することができる。
さらなる効果や変形例は、当業者によって容易に導き出すことができる。このため、本発明のより広範な態様は、以上のように表しかつ記述した特定の詳細および代表的な実施形態に限定されるものではない。したがって、添付の特許請求の範囲およびその均等物によって定義される総括的な発明の概念の精神または範囲から逸脱することなく、様々な変更が可能である。
10 ロボット
11 基台部
12 旋回ベース(旋回アーム)
13 下部アーム(第1アーム)
13a 基端部
13b 先端部
131 空間部
132 側壁
133 底壁
14 上部アーム(第2アーム)
14a 基端部
14b 先端部
141 ギヤ部
141a 歯(突起)
30 制動機構
31 固定部
311 本体
312 ガイド部
314 付勢部材
315 揺動シャフト
316 ソレノイド(制動駆動部)
32 可動部
321 爪
60 制御装置
61 制御部
611 動作制御部
612 検出部
613 制動制御部
62 記憶部
M1 第1アクチュエータ
M2 第2アクチュエータ
AX1 第1軸
AX2 第2軸
11 基台部
12 旋回ベース(旋回アーム)
13 下部アーム(第1アーム)
13a 基端部
13b 先端部
131 空間部
132 側壁
133 底壁
14 上部アーム(第2アーム)
14a 基端部
14b 先端部
141 ギヤ部
141a 歯(突起)
30 制動機構
31 固定部
311 本体
312 ガイド部
314 付勢部材
315 揺動シャフト
316 ソレノイド(制動駆動部)
32 可動部
321 爪
60 制御装置
61 制御部
611 動作制御部
612 検出部
613 制動制御部
62 記憶部
M1 第1アクチュエータ
M2 第2アクチュエータ
AX1 第1軸
AX2 第2軸
Claims (11)
- 第1軸まわりに回転可能な第1アームと、
前記第1アームに対し、第2軸まわりに揺動可能に連結される第2アームと、
前記第1アームにおいて基端部と先端部との間に設けられ、前記第2アームを制動する制動機構と
を備えることを特徴とするロボット。 - 前記第2アームを回転駆動する第2アクチュエータをさらに備え、
前記第2アクチュエータ、前記第2アームおよび前記制動機構は、
前記第1アームの延伸向きと直交する幅方向に、前記第2アクチュエータ、前記第2アームおよび前記制動機構の並びで配置されること
を特徴とする請求項1に記載のロボット。 - 前記第1アームは、
前記第1アームの先端部の一部が切り欠かれて形成される空間部を有し、
前記制動機構は、
前記空間部における前記第1アームの基端部側に設けられること
を特徴とする請求項2に記載のロボット。 - 前記第2アクチュエータは、
前記第1アームの先端部において、前記空間部とは反対側の面に設けられること
を特徴とする請求項3に記載のロボット。 - 前記制動機構は、
前記第2軸に対して進退する直動向きが前記第1アームの延伸向きに沿った可動部を備えること
を特徴とする請求項1〜4のいずれか一つに記載のロボット。 - 前記第2アームは、
前記第2軸の同心円上において少なくとも前記第2アームの揺動範囲にわたって並設される複数の突起を基端部に備え、
前記制動機構は、
前記第2軸と平行な方向視において、直動する前記可動部を両側からガイドするガイド部を備え、
前記可動部は、
前記突起に対して係合可能な爪を先端部に備えること
を特徴とする請求項5に記載のロボット。 - 前記制動機構は、
前記第2軸と平行な回転軸まわりに揺動可能に設けられること
を特徴とする請求項1〜6のいずれか一つに記載のロボット。 - 前記第1アームは、
前記第1軸まわりに回転可能な旋回アームに連結される下部アームであり、
前記第2アームは、
前記下部アームに連結される上部アームであること
を特徴とする請求項1〜7のいずれか一つに記載のロボット。 - 前記第1アームは、
取付面に固定されるベースに対して前記第1軸まわりに回転可能に連結される旋回アームであり、
前記第2アームは、
前記旋回アームに連結される下部アームであること
を特徴とする請求項1〜7のいずれか一つに記載のロボット。 - 前記第2アームの動作を制御する動作制御部と、
前記制動機構の動作を制御する制動制御部と
を備え、
前記制動制御部は、
制動を解除する際に、前記動作制御部によって前記第2アームを前記第2軸まわりに所定の振幅で往復回転させること
を特徴とする請求項1〜9のいずれか一つに記載のロボット。 - 前記第2アームの動作を制御する動作制御部と、
前記制動機構の動作を制御する制動制御部と
を備え、
前記制動制御部は、
制動を解除する際に、前記動作制御部によって前記第2アームを前記第2軸まわりにおける前記第2アームが重力で回転する方向とは反対の方向へ回転させること
を特徴とする請求項1〜9のいずれか一つに記載のロボット。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014248954A JP2016107382A (ja) | 2014-12-09 | 2014-12-09 | ロボット |
| KR1020150146496A KR20160069994A (ko) | 2014-12-09 | 2015-10-21 | 로봇 및 로봇 아암 |
| CN201510861034.4A CN105690368A (zh) | 2014-12-09 | 2015-12-01 | 机器人 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014248954A JP2016107382A (ja) | 2014-12-09 | 2014-12-09 | ロボット |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2016107382A true JP2016107382A (ja) | 2016-06-20 |
Family
ID=56121492
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014248954A Pending JP2016107382A (ja) | 2014-12-09 | 2014-12-09 | ロボット |
Country Status (3)
| Country | Link |
|---|---|
| JP (1) | JP2016107382A (ja) |
| KR (1) | KR20160069994A (ja) |
| CN (1) | CN105690368A (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108687786A (zh) * | 2018-08-15 | 2018-10-23 | 安徽星宇生产力促进中心有限公司 | 一种机器人用自动感应制动装置及其使用方法 |
| JP2019051583A (ja) * | 2017-01-27 | 2019-04-04 | ザ・ボーイング・カンパニーThe Boeing Company | 4つの非定常位置を供給するケーブルキャリアクロスオーバ |
| WO2020159020A1 (en) * | 2019-01-31 | 2020-08-06 | Easyendo Surgical, Inc. | Rotation locking device and two-degree-of-freedom (2dof) rotary arm including same |
| CN114474153A (zh) * | 2022-01-05 | 2022-05-13 | 赵忠源 | 一种应用于机器人自然俯仰和滚动的底座 |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108789486A (zh) * | 2017-04-28 | 2018-11-13 | 广明光电股份有限公司 | 机器手臂解除刹车的方法 |
| JP6988152B2 (ja) * | 2017-05-08 | 2022-01-05 | セイコーエプソン株式会社 | ロボット |
| GB2611360B (en) * | 2021-10-04 | 2024-02-28 | Prec Robotics Limited | A joint locking mechanism |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0631680A (ja) | 1992-07-20 | 1994-02-08 | Tokico Ltd | 工業用ロボット |
| JP2005030451A (ja) * | 2003-07-08 | 2005-02-03 | Alps Electric Co Ltd | 力覚付与型入力装置 |
| CN100488734C (zh) * | 2003-10-10 | 2009-05-20 | 三菱电机株式会社 | 机器人的控制装置 |
| US9037295B2 (en) * | 2008-03-07 | 2015-05-19 | Perception Raisonnement Action En Medecine | Dynamic physical constraint for hard surface emulation |
| FR2950831B1 (fr) * | 2009-10-05 | 2012-08-10 | Commissariat Energie Atomique | Articulation motorisee pour bras de robot |
| CN102626930B (zh) * | 2012-04-28 | 2014-06-04 | 哈尔滨工业大学 | 具有失电制动与多种感知功能的机械臂模块化关节 |
| KR20140026718A (ko) * | 2012-08-23 | 2014-03-06 | 대우조선해양 주식회사 | 다관절 아암의 힌지부 고정장치 |
-
2014
- 2014-12-09 JP JP2014248954A patent/JP2016107382A/ja active Pending
-
2015
- 2015-10-21 KR KR1020150146496A patent/KR20160069994A/ko not_active Ceased
- 2015-12-01 CN CN201510861034.4A patent/CN105690368A/zh active Pending
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019051583A (ja) * | 2017-01-27 | 2019-04-04 | ザ・ボーイング・カンパニーThe Boeing Company | 4つの非定常位置を供給するケーブルキャリアクロスオーバ |
| US11247349B2 (en) | 2017-01-27 | 2022-02-15 | The Boeing Company | Cable carrier crossover supplying four non-static locations |
| JP7050502B2 (ja) | 2017-01-27 | 2022-04-08 | ザ・ボーイング・カンパニー | 4つの非定常位置を供給するケーブルキャリアクロスオーバ |
| CN108687786A (zh) * | 2018-08-15 | 2018-10-23 | 安徽星宇生产力促进中心有限公司 | 一种机器人用自动感应制动装置及其使用方法 |
| WO2020159020A1 (en) * | 2019-01-31 | 2020-08-06 | Easyendo Surgical, Inc. | Rotation locking device and two-degree-of-freedom (2dof) rotary arm including same |
| CN114474153A (zh) * | 2022-01-05 | 2022-05-13 | 赵忠源 | 一种应用于机器人自然俯仰和滚动的底座 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR20160069994A (ko) | 2016-06-17 |
| CN105690368A (zh) | 2016-06-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2016107382A (ja) | ロボット | |
| CN106113019B (zh) | 多关节挠性机械手臂 | |
| JP5832931B2 (ja) | 関節ロボット手首 | |
| JP6248588B2 (ja) | 車両の電動制動装置 | |
| CN111360787B (zh) | 七自由度串并混联机械臂及机器人 | |
| US11674556B1 (en) | Band brake for backdrivability control | |
| JP7223769B2 (ja) | 駆動軸の制動装置 | |
| KR20160018672A (ko) | 로봇 및 로봇의 관절 기구 | |
| JP6229617B2 (ja) | ロボット | |
| CN112976049A (zh) | 机器人的关节结构 | |
| CN106976081B (zh) | 机器手臂解除剎车的方法 | |
| US20250230848A1 (en) | Speed reducer, joint module and robotic arm | |
| CN111283729B (zh) | 解刹车装置及其适用的机器手臂 | |
| WO2016158614A1 (ja) | ロボットアーム固定装置およびロボット | |
| CN114347006A (zh) | 模块化结构构型手臂及机器人 | |
| JP3203245U (ja) | 関節ロボット手首 | |
| JP2012086334A (ja) | 把持装置及びロボット装置 | |
| CN109794952B (zh) | 一种末端执行器和末端轴组件、机器人及控制方法 | |
| CA1232888A (en) | Braking device at motor-driven reeling devices | |
| JP2021139452A (ja) | 駆動装置、ロボット及び画像形成装置 | |
| WO2016092627A1 (ja) | ロボット | |
| CN110815288B (zh) | 机器手臂的刹车装置 | |
| JP7840659B2 (ja) | ロボットシステム、ロボットシステムの制御方法、物品の製造方法、表示装置、表示装置の制御方法、制御プログラムおよび記録媒体 | |
| JPH02274482A (ja) | バイラテラルマスタスレーブマニピュレータ | |
| US10941821B2 (en) | Four-state brake module for use as a joint in a mechanical linkage |