JP2016125570A - 動力変速システム - Google Patents
動力変速システム Download PDFInfo
- Publication number
- JP2016125570A JP2016125570A JP2014265747A JP2014265747A JP2016125570A JP 2016125570 A JP2016125570 A JP 2016125570A JP 2014265747 A JP2014265747 A JP 2014265747A JP 2014265747 A JP2014265747 A JP 2014265747A JP 2016125570 A JP2016125570 A JP 2016125570A
- Authority
- JP
- Japan
- Prior art keywords
- power
- gear
- continuously variable
- transmission mechanism
- variable transmission
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 230000005540 biological transmission Effects 0.000 title claims abstract description 124
- 230000007246 mechanism Effects 0.000 claims abstract description 105
- 230000005856 abnormality Effects 0.000 claims abstract description 30
- 230000008859 change Effects 0.000 claims description 15
- 230000002194 synthesizing effect Effects 0.000 abstract description 19
- 238000010586 diagram Methods 0.000 description 6
- 238000000034 method Methods 0.000 description 6
- 230000008569 process Effects 0.000 description 6
- 230000000994 depressogenic effect Effects 0.000 description 3
- 230000001360 synchronised effect Effects 0.000 description 3
- 238000002485 combustion reaction Methods 0.000 description 2
- 239000000446 fuel Substances 0.000 description 2
- 238000012545 processing Methods 0.000 description 2
- 230000009471 action Effects 0.000 description 1
- 230000007175 bidirectional communication Effects 0.000 description 1
- 230000006854 communication Effects 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 239000007858 starting material Substances 0.000 description 1
- 238000004804 winding Methods 0.000 description 1
Images




Landscapes
- Transmission Devices (AREA)
- Control Of Transmission Device (AREA)
Abstract
【課題】ベルト式の無段変速機構を備えていながら、その無段変速機構に動力を伝達できない異常が発生しても車両の走行を可能にする、動力変速システムを提供する。【解決手段】動力分割式無段変速機構4の無段変速機構23にベルト切れなどの異常が発生した場合には、エンジン2に設けられているスロットルバルブの開度が所定以下に抑制されるとともに、動力分割式無段変速機構4の動力伝達モードがギヤモードに固定される。ギヤモードでは、T/M入力軸21に入力される動力が一定変速機構24を経由して合成用歯車機構25に伝達され、その一定変速機構24を経由する動力が合成用歯車機構25から出力される。【選択図】図2
Description
本発明は、車両に搭載されて、車両の駆動源の動力を変速するシステムに関する。
車両に搭載される変速機として、CVT(Continuously Variable Transmission:無段変速機)が広く知られている。
CVTは、プライマリプーリとセカンダリプーリとにベルトを巻き掛けた構成を有している。CVTでは、プライマリプーリおよびセカンダリプーリの各溝幅を連続的に変化させて、ベルトのプライマリプーリおよびセカンダリプーリに対する巻きかけ径を変化させることにより、変速比を連続的に無段階で変化させることができる。
そのため、CVTを搭載した車両では、たとえば、駆動源としてエンジンを搭載している場合、エンジンを効率よく動作させることができる最適燃費ラインに基づいて、アクセル開度および車速に応じたエンジンの目標回転数を設定し、CVTの変速比をエンジンの回転数が目標回転数に一致する変速比に設定することができる。これにより、車両の走行燃費の向上を図ることができる。
ところが、CVTを搭載した車両では、駆動源からの動力をベルトを介して駆動輪に伝達できなくなり、走行不能となる可能性がある。
本発明の目的は、ベルト式の無段変速機構を備えていながら、その無段変速機構に動力を伝達できない異常が発生しても車両の走行(リンプホーム走行)を可能にする、動力変速システムを提供することである。
前記の目的を達成するため、本発明に係る動力変速システムは、エンジンが駆動源として搭載される車両に搭載される動力変速システムであって、エンジンからの動力が入力される入力軸と、プライマリプーリとセカンダリプーリとにベルトを巻き掛けた構成を有し、入力軸に入力される動力をベルト変速比の変更により無段階に変速するベルト式の無段変速機構と、入力軸に入力される動力を一定の変速比で変速するギヤ式の一定変速機構と、無段変速機構および/または一定変速機構から伝達される動力を出力する出力歯車機構と、入力軸から出力歯車機構への動力の伝達経路を切り替える伝達経路切替手段と、プライマリプーリからセカンダリプーリへのベルトを介した動力の伝達に異常が発生しているか否かを判定する異常判定手段と、異常判定手段により異常が発生していると判定された場合に、エンジンを制御して、エンジンのスロットル開度を所定以下に抑制し、かつ、伝達経路切替手段を制御して、入力軸に入力される動力が無段変速機構を介さずに一定変速機構を経由して出力歯車機構に伝達されるギヤモードに固定するフェイルセーフ手段とを含む。
この構成によれば、プライマリプーリからセカンダリプーリへのベルトを介した動力の伝達に異常が発生した場合には、エンジンのスロットル開度が所定以下に抑制されるとともに、入力軸に入力される動力が無段変速機構を介さずに一定変速機構を経由して出力歯車機構に伝達されるギヤモードに固定される。無段変速機構を経由する動力の伝達が不能であっても、一定変速機構を経由する動力の伝達は可能である。したがって、ベルト切れや継続的なベルトの滑りなどの異常が発生した場合に、ギヤモードに固定されることにより、車両のリンプホーム(非常時回避)走行を可能にすることができる。
動力変速システムは、前記伝達経路切替手段を制御して、入力軸に入力されるエンジンの動力が無段変速機構を経由して出力歯車機構に伝達されるベルトモードと、入力軸に入力される動力が無段変速機構および一定変速機構を経由して出力歯車機構に伝達されるスプリットモードとを切り替えるモード切替手段を含む構成であってもよい。
ベルトを介した動力の伝達に異常が発生していない場合には、ベルトモードとスプリットモードとを選択的に切り替えることにより、車両の走行状況に適した変速比を得ることができる。そして、ベルトを介した動力の伝達に異常が発生した場合には、ベルトモードまたはスプリットモードからギヤモードに切り替えられるとよい。このギヤモードへの切り替えの際には、エンジンのスロットル開度が所定以下に抑制されるので、その切り替えの前後で車両挙動が急変すること(たとえば、車両の急発進)を抑制できる。
本発明によれば、ベルト切れや継続的なベルトの滑りなどの異常が発生した場合に、車両のリンプホーム走行を可能にすることができる。また、その異常発生時の車両挙動の急変を抑制することができる。
以下では、本発明の実施の形態について、添付図面を参照しつつ詳細に説明する。
<車両の要部構成>
図1は、本発明の一実施形態に係る動力変速システムが搭載された車両1の要部の構成を示す図である。
車両1は、エンジン2を駆動源とする自動車である。
エンジン2の出力は、トルクコンバータ3および動力分割式無段変速機4を介して、車両1の駆動輪(たとえば、左右の前輪)に伝達される。エンジン2には、エンジン2の燃焼室への吸気量を調整するためのスロットルバルブおよび燃焼室内に電気放電を生じさせる点火プラグなどが設けられている。また、エンジン2には、その始動のためのスタータが付随して設けられている。
車両1には、CPU、ROMおよびRAMなどを含む構成の複数のECU(電子制御ユニット)が備えられている。ECUには、エンジンECU101および変速機ECU102が含まれる。複数のECUは、CAN(Controller Area Network)通信プロトコルによる双方向通信が可能に接続されている。
エンジンECU101には、アクセルセンサ103およびエンジン回転数センサ104などが接続されている。
アクセルセンサ103は、アクセルペダル(図示せず)の操作量に応じた信号をエンジンECU101に入力する。エンジンECU101は、アクセルセンサ103から入力される信号に基づいて、アクセルペダルの最大操作量に対する操作量の割合、つまりアクセルペダルが踏み込まれていないときを0%とし、アクセルペダルが最大に踏み込まれたときを100%とする百分率であるアクセル開度を演算する。
エンジン回転数センサ104は、エンジン2の回転(クランクシャフトの回転)に同期したパルス信号をエンジンECU101に入力する。エンジンECU101は、エンジン回転数センサ104から入力されるパルス信号の周波数をエンジン2の回転数(エンジン回転数)に換算する。
エンジンECU101は、各種センサから入力される信号から得られる数値および他のECUから入力される種々の情報などに基づいて、エンジン2の始動、停止および出力調整のため、エンジン2に設けられたスロットルバルブや点火プラグなどを制御する。
変速機ECU102には、プライマリ回転数センサ105およびセカンダリ回転数センサ106などが接続されている。
プライマリ回転数センサ105は、たとえば、動力分割式無段変速機4のプライマリプーリ33(図2参照)の回転に同期したパルス信号を変速機ECU102に入力する。変速機ECU102は、プライマリ回転数センサ105から入力されるパルス信号の周波数をプライマリ軸31(図2参照)の回転数であるプライマリ回転数に換算する。
セカンダリ回転数センサ106は、たとえば、動力分割式無段変速機4のセカンダリプーリ34(図2参照)の回転に同期したパルス信号を変速機ECU102に入力する。変速機ECU102は、セカンダリ回転数センサ106から入力されるパルス信号の周波数をセカンダリ軸32(図2参照)の回転数であるセカンダリ回転数に換算する。
変速機ECU102は、各種センサから入力される信号から得られる数値および他のECUから入力される種々の情報などに基づいて、動力分割式無段変速機4の変速制御および動力伝達モードの切り替えのため、動力分割式無段変速機4の各部に油圧を供給するための油圧回路に含まれる各種のバルブ(図示せず)などを制御する。
<駆動系統の構成>
図2は、車両1の駆動系統の構成を示すスケルトン図である。
トルクコンバータ3は、トルコン入力軸11、トルコン出力軸12、ポンプインペラ13、タービンランナ14およびロックアップクラッチ15を備えている。トルコン入力軸11およびトルコン出力軸12は、エンジン2の出力軸16(以下「E/G出力軸16」という。)と同一の回転軸線を中心に回転可能に設けられている。トルコン入力軸11には、E/G出力軸16が連結されている。ポンプインペラ13の中心には、トルコン入力軸11が接続され、ポンプインペラ13は、トルコン入力軸11と一体的に回転可能に設けられている。タービンランナ14の中心には、トルコン出力軸12が接続され、タービンランナ14は、トルコン出力軸12と一体的に回転可能に設けられている。ロックアップクラッチ15が係合されると、ポンプインペラ13とタービンランナ14とが直結され、ロックアップクラッチ15が解放されると、ポンプインペラ13とタービンランナ14とが分離される。
ロックアップクラッチ15が解放された状態において、E/G出力軸16からトルコン入力軸11に動力が入力されると、トルコン入力軸11およびポンプインペラ13が回転する。ポンプインペラ13が回転すると、ポンプインペラ13からタービンランナ14に向かうオイルの流れが生じる。このオイルの流れがタービンランナ14で受けられて、タービンランナ14が回転する。このとき、トルクコンバータ3の増幅作用が生じ、タービンランナ14には、トルコン入力軸11に入力される動力(トルク)よりも大きな動力が発生する。そして、そのタービンランナ14の動力がトルコン出力軸12から出力される。
ロックアップクラッチ15が係合された状態では、E/G出力軸16からトルコン入力軸11に動力が入力されると、トルコン入力軸11、ポンプインペラ13およびタービンランナ14が一体となって回転する。そして、タービンランナ14の回転による動力がトルコン出力軸12から出力される。
動力分割式無段変速機4は、トルクコンバータ3から出力される動力をデファレンシャルギヤ5に伝達する。動力分割式無段変速機4は、T/M入力軸21、T/M出力軸22、無段変速機構23、一定変速機構24および合成用歯車機構25を備えている。
T/M入力軸21には、トルコン出力軸12が連結されている。
T/M出力軸22は、T/M入力軸21と平行に設けられている。
無段変速機構23は、公知のベルト式の無段変速機(CVT:Continuously Variable Transmission)と同様の構成を有している。具体的には、無段変速機構23は、T/M入力軸21に連結されたプライマリ軸31と、プライマリ軸31と平行に設けられたセカンダリ軸32と、プライマリ軸31に相対回転不能に支持されたプライマリプーリ33と、セカンダリ軸32に相対回転不能に支持されたセカンダリプーリ34と、プライマリプーリ33とセカンダリプーリ34とに巻き掛けられたベルト35とを備えている。
一定変速機構24は、遊星歯車機構41、スプリットドライブギヤ42、スプリットドリブンギヤ43およびアイドルギヤ44を備えている。
遊星歯車機構41には、キャリア45、サンギヤ46およびリングギヤ47が含まれる。キャリア45は、T/M入力軸21に相対回転不能に支持されている。キャリア45は、複数個のピニオンギヤ48を回転可能に支持している。複数のピニオンギヤ48は、円周上に配置されている。サンギヤ46は、T/M入力軸21に相対回転可能に外嵌されて、各ピニオンギヤ48にT/M入力軸21の回転径方向の内側から噛合している。リングギヤ47は、キャリア45の周囲を取り囲む円環状を有し、各ピニオンギヤ48にT/M入力軸21の回転径方向の外側から噛合している。
スプリットドライブギヤ42は、サンギヤ46と一体回転可能に設けられている。
スプリットドリブンギヤ43は、次に述べる合成用歯車機構25のキャリア51の外周に、キャリア51と一体回転可能に設けられている。
アイドルギヤ44は、スプリットドライブギヤ42およびスプリットドリブンギヤ43と噛合している。
合成用歯車機構25は、遊星歯車機構の構成を有している。すなわち、合成用歯車機構25は、キャリア51、サンギヤ52およびリングギヤ53を備えている。キャリア51の中心には、無段変速機構23のセカンダリ軸32が相対回転可能に挿通されている。キャリア51は、複数個のピニオンギヤ54を回転可能に支持している。複数のピニオンギヤ54は、円周上に配置されている。サンギヤ52は、セカンダリ軸32に相対回転不能に支持されて、各ピニオンギヤ54にセカンダリ軸32の回転径方向の内側から噛合している。リングギヤ53は、キャリア51の周囲を取り囲む円環状を有し、各ピニオンギヤ54にセカンダリ軸32の回転径方向の外側から噛合している。また、リングギヤ53の中心には、T/M出力軸22の一端が接続され、リングギヤ53は、T/M出力軸22と一体回転可能に設けられている。T/M出力軸22の他端部には、出力ギヤ55が相対回転不能に支持されている。
出力ギヤ55の回転は、アイドルギヤ機構6を経由して、デファレンシャルギヤ5に伝達される。アイドルギヤ機構6には、T/M出力軸22と平行に設けられたアイドル軸61と、アイドル軸61に相対回転不能に支持された第1アイドルギヤ62および第2アイドルギヤ63とが含まれる。第1アイドルギヤ62は、出力ギヤ55と噛合している。第2アイドルギヤ63は、デファレンシャルギヤ5に備えられたリングギヤ64と噛合している。
また、動力分割式無段変速機4は、ロークラッチC1、リバースブレーキB1およびハイブレーキB2を備えている。
ロークラッチC1は、T/M出力軸22とセカンダリ軸32とを直結する係合状態(オン)と、その直結を解除する解放状態(オフ)とに切り替えられる。
リバースブレーキB1は、スプリットドライブギヤ42(サンギヤ46)を制動する係合状態(オン)と、スプリットドライブギヤ42の回転を許容する解放状態(オフ)とに切り替えられる。
ハイブレーキB2は、リングギヤ47を制動する係合状態(オン)と、リングギヤ47の回転を許容する解放状態(オフ)とに切り替えられる。
<動力伝達モード>
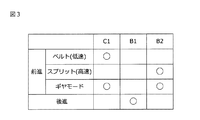
図3は、車両1の前進時および後進時におけるロークラッチC1、リバースブレーキB1およびハイブレーキB2の状態を示す図である。図4は、無段変速機構23の変速比γbと動力分割式無段変速機4の変速比(以下「T/M変速比」という。)γallとの関係を示す図である。
図3において、「○」は、ロークラッチC1、リバースブレーキB1およびハイブレーキB2が係合状態であることを示している。
動力分割式無段変速機4は、車両1の前進時の動力伝達モードとして、ベルトモードおよびスプリットモードを有している。
ベルトモードでは、ハイブレーキB2およびリバースブレーキB1が解放される。そして、ロークラッチC1が係合される。これにより、T/M出力軸22およびセカンダリ軸32が直結される。
T/M入力軸21に入力される動力は、無段変速機構23のプライマリ軸31に伝達され、プライマリ軸31およびプライマリプーリ33を回転させる。プライマリプーリ33の回転は、ベルト35を介して、セカンダリプーリ34に伝達され、セカンダリプーリ34およびセカンダリ軸32を回転させる。ロークラッチC1が係合されているので、T/M出力軸22がセカンダリ軸32と一体に回転する。したがって、ベルトモードでは、図4に示されるように、T/M変速比γallがベルト変速比γbと一致する。
T/M出力軸22の回転は、出力ギヤ55、第1アイドルギヤ62、アイドル軸61および第2アイドルギヤ63を介して、デファレンシャルギヤ5のリングギヤ64に伝達される。これにより、車両1のドライブシャフト71,72が前進方向に回転する。
図5は、合成用歯車機構25のキャリア51、サンギヤ52およびリングギヤ53の回転数の関係を示す共線図である。
スプリットモードでは、図3に示されるように、ハイブレーキB2が係合され、リバースブレーキB1およびロークラッチC1が解放される。ハイブレーキB2が係合されることにより、一定変速機構24のリングギヤ47が制動される。また、ロークラッチC1が解放されることにより、T/M出力軸22とセカンダリ軸32との直結が解除される。
T/M入力軸21に入力される動力は、無段変速機構23のプライマリ軸31に伝達され、プライマリ軸31およびプライマリプーリ33を回転させる。プライマリプーリ33の回転は、ベルト35を介して、セカンダリプーリ34に伝達され、セカンダリプーリ34およびセカンダリ軸32を回転させる。セカンダリ軸32の回転により、合成用歯車機構25のサンギヤ52が回転する。
また、一定変速機構24のリングギヤ47が制動されているので、T/M入力軸21に入力される動力は、一定変速機構24のキャリア45を公転させるとともに、そのキャリア45に保持されているピニオンギヤ48を回転させる。ピニオンギヤ48の回転により、ピニオンギヤ48からサンギヤ46に動力が入力される。これにより、ピニオンギヤ48およびスプリットドライブギヤ42が回転する。スプリットドライブギヤ42の回転は、アイドルギヤ44を介して、スプリットドリブンギヤ43に伝達され、スプリットドリブンギヤ43および合成用歯車機構25のキャリア51を回転させる。
一定変速機構24の変速比γgが一定で不変(固定)であるので、スプリットモードでは、T/M入力軸21に入力される動力が一定であれば、合成用歯車機構25のキャリア51の回転が一定速度に保持される。そのため、ベルト変速比γbが上げられると、図5に示されるように、合成用歯車機構25のサンギヤ52の回転速度が下がるので、合成用歯車機構25のリングギヤ53(T/M出力軸22)の回転速度が上がる。その結果、スプリットモードでは、図4に示されるように、ベルト変速比γbが大きいほど、T/M変速比γallが下がる。
T/M出力軸22の回転は、出力ギヤ55、第1アイドルギヤ62、アイドル軸61および第2アイドルギヤ63を介して、デファレンシャルギヤ5のリングギヤ64に伝達される。これにより、車両1のドライブシャフト71,72が前進方向に回転する。
車両1を後進させるための後進モードでは、図3に示されるように、ハイブレーキB2およびロークラッチC1が解放される。そして、リバースブレーキB1が係合される。これにより、スプリットドライブギヤ42(サンギヤ46)が制動される。スプリットドライブギヤ42の制動により、一定変速機構24のアイドルギヤ44が回転不能となり、スプリットドリブンギヤ43およびキャリア51が回転不能となる。
T/M入力軸21に入力される動力は、無段変速機構23のプライマリ軸31に伝達され、プライマリ軸31およびプライマリプーリ33を回転させる。プライマリプーリ33の回転は、ベルト35を介して、セカンダリプーリ34に伝達され、セカンダリプーリ34およびセカンダリ軸32を回転させる。セカンダリ軸32の回転により、合成用歯車機構25のサンギヤ52が回転する。キャリア51が回転不能なため、サンギヤ52が回転すると、リングギヤ53がサンギヤ52と逆方向に回転する。このリングギヤ53の回転方向は、ベルトモードおよびスプリットモードにおけるリングギヤ53の回転方向と逆方向となる。そして、リングギヤ53と一体にT/M出力軸22が回転する。T/M出力軸22の回転は、出力ギヤ55、第1アイドルギヤ62、アイドル軸61および第2アイドルギヤ63を介して、デファレンシャルギヤ5のリングギヤ64に伝達される。これにより、車両1のドライブシャフト71,72が後進方向に回転する。
<フェイルセーフ処理>
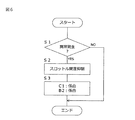
図6は、フェイルセーフ処理の流れを示すフローチャートである。
車両1の走行中、変速機ECU102により、図6に示されるフェイルセーフ処理が繰り返し実行される。
フェイルセーフ処理では、動力分割式無段変速機4の無段変速機構23に異常が発生しているか否かが判定される(ステップS1)。具体的には、無段変速機構23のプライマリプーリ33からセカンダリプーリ34へのベルト35を介した動力の伝達に異常、たとえば、ベルト35の切断や継続的なベルト35の滑りなどの異常が発生しているか否かが判定される。より具体的には、プライマリ回転数が急上昇し、その急上昇後のプライマリ回転数が所定時間以上継続して維持された場合に、無段変速機構23に異常が発生していると判定される。
無段変速機構23に異常が発生していない場合(ステップS1のNO)、フェイルセーフ処理が一旦終了され、その後の所定のタイミングで、フェイルセーフ処理が再び実行される。
無段変速機構23に異常が発生している場合には(ステップS1のYES)、変速機ECU102からエンジンECU101に、スロットル開度を所定以下に抑制する指令が出力される。この指令を受けて、エンジンECU101によりエンジン2のスロットルバルブが制御されて、スロットルバルブの開度が所定以下に抑制される(ステップS2)。
その後、変速機ECU102により動力分割式無段変速機4の油圧回路が制御されて、ハイブレーキB2およびロークラッチC1が係合される(ステップS3)。これにより、図3に示されるように、動力分割式無段変速機4の動力伝達モードがベルトモードまたはスプリットモードからギヤモードに切り替えられて、フェイルセーフ処理が終了される。その後は、動力伝達モードがギヤモードに固定される。
ギヤモードでは、ハイブレーキB2が係合されることにより、一定変速機構24のリングギヤ47が制動される。また、ロークラッチC1が係合されることにより、T/M出力軸22およびセカンダリ軸32が直結される。一定変速機構24のリングギヤ47が制動されているので、T/M入力軸21に入力される動力は、一定変速機構24のキャリア45を公転させるとともに、そのキャリア45に保持されているピニオンギヤ48を回転させる。ピニオンギヤ48の回転により、ピニオンギヤ48からサンギヤ46に動力が入力される。これにより、スプリットドライブギヤ42が回転する。スプリットドライブギヤ42の回転は、アイドルギヤ44を介して、スプリットドリブンギヤ43に伝達され、スプリットドリブンギヤ43および合成用歯車機構25のキャリア51を回転させる。そして、ロークラッチC1が係合されているので、キャリア51とともに、サンギヤ52およびリングギヤ53が回転する。その結果、T/M出力軸22が回転し、車両1のドライブシャフト71,72に前進方向の動力が伝達される。
<作用効果>
以上のように、ベルトモードでは、T/M入力軸21に入力されるエンジン2の動力が無段変速機構23を経由して合成用歯車機構25に伝達され、その無段変速機構23を経由する動力が合成用歯車機構25から出力される。スプリットモードでは、T/M入力軸21に入力される動力が無段変速機構23および一定変速機構24を経由して合成用歯車機構25に伝達され、無段変速機構23を経由する動力と一定変速機構24を経由する動力とが合成用歯車機構25で合成されて、その合成された動力が合成用歯車機構25から出力される。
そして、無段変速機構23のプライマリプーリ33からセカンダリプーリ34へのベルト35を介した動力の伝達に異常が発生した場合には、エンジン2に設けられているスロットルバルブの開度が所定以下に抑制されるとともに、動力分割式無段変速機4の動力伝達モードがギヤモードに固定される。ギヤモードでは、T/M入力軸21に入力されるエンジン2の動力が一定変速機構24を経由して合成用歯車機構25に伝達され、その一定変速機構24を経由する動力が合成用歯車機構25から出力される。無段変速機構23を経由する動力の伝達が不能であっても、一定変速機構24を経由する動力の伝達は可能である。したがって、ベルト35切れや継続的なベルト35の滑りなどの異常が発生した場合に、ギヤモードに固定されることにより、車両のリンプホーム(非常時回避)走行を可能にすることができる。また、スロットルバルブの開度が所定以下に抑制されるので、ベルトモードまたはスプリットモードで異常が発生し、ベルトモードまたはスプリットモードからギヤモードに切り替えられる場合に、その切り替えの前後で車両挙動が急変すること(たとえば、車両の急発進)を抑制できる。
<変形例>
以上、本発明の一実施形態について説明したが、本発明は、他の形態で実施することもできる。
たとえば、無段変速機構23に異常が発生した場合に、スロットル開度が所定以下に抑制されるとしたが、車両1が平坦路を走行中と登坂路を走行中とでスロットル開度の抑制度合を異ならせてもよい。車両1が平坦路を走行中は、エンジン2の大きな出力が不要であるから、たとえば、スロットル開度がエンジンストールが生じない最低限まで抑制されてもよい。一方、車両1が登坂路を走行中は、エンジン2の大きな出力が必要とされるので、車両1が平坦路を走行中の場合と比較して、スロットル開度の抑制が緩められてもよい。
また、無段変速機構23に異常が発生して、ベルトモードまたはスプリットモードからギヤモードに切り替えられた後は、スロットル開度を抑制した状態が維持されてもよいし、解除されてもよい。スロットル開度を抑制した状態が維持される場合、アクセルペダルが踏み込まれても車速が大きく上昇しないので、エンジン2の出力不足を運転者に認識させることができ、何らかの異常が発生していることを運転者に気づかせることができる。
その他、前述の構成には、特許請求の範囲に記載された事項の範囲で種々の設計変更を施すことが可能である。
1 車両
4 動力分割式無段変速機(動力変速システム)
21 T/M入力軸(入力軸)
23 無段変速機構
24 一定変速機構
25 合成用歯車機構(出力歯車機構)
33 プライマリプーリ
34 セカンダリプーリ
35 ベルト
101 エンジンECU(フェイルセーフ手段)
102 変速機ECU(モード切替手段、異常判定手段、フェイルセーフ手段)
B2 ハイブレーキ(モード切替手段)
C1 ロークラッチ(モード切替手段)
4 動力分割式無段変速機(動力変速システム)
21 T/M入力軸(入力軸)
23 無段変速機構
24 一定変速機構
25 合成用歯車機構(出力歯車機構)
33 プライマリプーリ
34 セカンダリプーリ
35 ベルト
101 エンジンECU(フェイルセーフ手段)
102 変速機ECU(モード切替手段、異常判定手段、フェイルセーフ手段)
B2 ハイブレーキ(モード切替手段)
C1 ロークラッチ(モード切替手段)
Claims (1)
- エンジンが駆動源として搭載される車両に搭載される動力変速システムであって、
前記エンジンからの動力が入力される入力軸と、
プライマリプーリとセカンダリプーリとにベルトを巻き掛けた構成を有し、前記入力軸に入力される動力をベルト変速比の変更により無段階に変速するベルト式の無段変速機構と、
前記入力軸に入力される動力を一定の変速比で変速するギヤ式の一定変速機構と、
前記無段変速機構および/または前記一定変速機構から伝達される動力を出力する出力歯車機構と、
前記入力軸から前記出力歯車機構への動力の伝達経路を切り替える伝達経路切替手段と、
前記プライマリプーリから前記セカンダリプーリへの前記ベルトを介した動力の伝達に異常が発生しているか否かを判定する異常判定手段と、
前記異常判定手段により異常が発生していると判定された場合に、前記エンジンを制御して、前記エンジンのスロットル開度を所定以下に抑制し、かつ、前記伝達経路切替手段を制御して、前記入力軸に入力される動力が前記無段変速機構を介さずに前記一定変速機構を経由して前記出力歯車機構に伝達されるギヤモードに固定するフェイルセーフ手段とを含む、動力変速システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014265747A JP2016125570A (ja) | 2014-12-26 | 2014-12-26 | 動力変速システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014265747A JP2016125570A (ja) | 2014-12-26 | 2014-12-26 | 動力変速システム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2016125570A true JP2016125570A (ja) | 2016-07-11 |
Family
ID=56359106
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014265747A Pending JP2016125570A (ja) | 2014-12-26 | 2014-12-26 | 動力変速システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2016125570A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US12181040B2 (en) | 2022-09-30 | 2024-12-31 | Subaru Corporation | Continuously variable transmission |
-
2014
- 2014-12-26 JP JP2014265747A patent/JP2016125570A/ja active Pending
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US12181040B2 (en) | 2022-09-30 | 2024-12-31 | Subaru Corporation | Continuously variable transmission |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6505447B2 (ja) | 動力分割式無段変速機の制御装置 | |
| JP6444170B2 (ja) | 動力分割式無段変速機の制御装置 | |
| JP6809969B2 (ja) | 変速機の制御装置 | |
| JP6949432B2 (ja) | 無段変速機の制御装置 | |
| JP6794015B2 (ja) | 車両用制御装置 | |
| JP6699937B2 (ja) | 車両用制御装置 | |
| JP6291170B2 (ja) | 車両用制御装置 | |
| JP2016125570A (ja) | 動力変速システム | |
| JP6556597B2 (ja) | 動力分割式無段変速機の制御装置 | |
| JP2018173152A (ja) | 変速機の制御装置 | |
| JP2019157946A (ja) | 無段変速機の制御装置 | |
| JP6556596B2 (ja) | 無段変速機の制御装置 | |
| JP6497908B2 (ja) | 無段変速機の制御装置 | |
| JP6809967B2 (ja) | 変速機の制御装置 | |
| JP2018054080A (ja) | 動力分割式無段変速機の制御装置 | |
| JP6809968B2 (ja) | 変速機の制御装置 | |
| JP6391426B2 (ja) | 動力分割式無段変速機の制御装置 | |
| JP6599226B2 (ja) | 動力分割式無段変速機の制御装置 | |
| JP2020041674A (ja) | 車両用制御装置 | |
| JP7013088B2 (ja) | 無段変速機の制御装置 | |
| JP6440438B2 (ja) | 車両用制御装置 | |
| JP6552334B2 (ja) | 動力分割式無段変速機の制御装置 | |
| JP2017101708A (ja) | 無段変速機の制御装置 | |
| JP7109858B2 (ja) | 変速機の制御装置 | |
| JP2017116045A (ja) | 無段変速機の制御装置 |