JP2016169032A - 食品箱詰め装置 - Google Patents
食品箱詰め装置 Download PDFInfo
- Publication number
- JP2016169032A JP2016169032A JP2015049885A JP2015049885A JP2016169032A JP 2016169032 A JP2016169032 A JP 2016169032A JP 2015049885 A JP2015049885 A JP 2015049885A JP 2015049885 A JP2015049885 A JP 2015049885A JP 2016169032 A JP2016169032 A JP 2016169032A
- Authority
- JP
- Japan
- Prior art keywords
- food
- scooping
- belt
- bottom plate
- moving
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Landscapes
- Container Filling Or Packaging Operations (AREA)
Abstract
【解決手段】ベルトコンベアのベルト6aに載って搬送されてくる食品をその下流側の位置で待ち受けて、到来した食品をベルト上で掬い取る掬い取り部2と、食品を掬い取った掬い取り部を、食品の箱詰め用に準備された箱の近くに移動させる移動手段と、移動手段の動作により箱の近くに移動した掬い取り部から食品を押し出し、その押し出しにより掬い取り部から箱内に食品を移す押出手段4とを備える。
【選択図】図3
Description
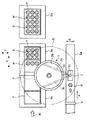
番重移動装置9(図1において二点鎖線で示す)は、台車移動機構、番重吊り上げ機構、番重スライド機構、および番重降下機構(いずれも図示略)を備えている。番重移動装置9の動作は、制御部8により制御される。
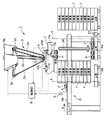
掬い取り部2は、図3に示されるように、1つの底板部2aと、2つの側壁部2bと、掬い取り検出センサ2gとを有する。
図1に示されるように、アレイセンサ5は、ベルト6aの上方に配置される。図5に示されるように、アレイセンサ5は、ベルト幅方向Bに沿って並ぶ複数の光電センサ5aと、複数の光電センサ5aを収容するケース5bとを有する。各光電センサ5aは、投光部および受光部(いずれも図示略)を有している。光電センサ5aの真下に菓子パンPが存在する場合には、投光部から出された光が菓子パンPの包装袋により高い反射率で反射され、閾値を超える量の反射光が受光部で受光される。閾値を超える量の反射光が受光部で受光された場合には、光電センサ5aは菓子パンPを検出する。一方、光電センサ5aの真下に菓子パンPが存在しない場合には、投光部から出された光はベルト6aにより低い反射率で反射されるため、閾値以下の量の反射光が受光部で受光される。閾値以下の量の反射光が受光部で受光された場合には、光電センサ5aは菓子パンPを検出しない。
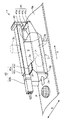
図2に示されるように、移動機構3は、円盤状の基部3aと、基部3aの周縁部から延出して先端部が互いに連結された3本のアーム3bと、3本のアーム3bの先端部を連結するとともに掬い取り部2を支持する連結部3cと、各アーム3bを駆動する駆動部(図示略)とを備えたパラレルリンクロボットである。3本のアーム3bは互いに同じ長さを有している。
図1に示されるように、移動機構3は、掬い取り部2を菓子パンPの待ち受け位置へ移動させる際には、図1、3に示されるように、掬い取り部2をベルト6aの上面近傍まで降下させるとともに、図5(b)(c)に示されるように、アレイセンサ5で検出された菓子パンPのベルト幅方向Bの位置で、かつアレイセンサ5よりも下流側の位置(待ち受け位置)に掬い取り部2を移動させて、その待ち受け位置で掬い取り部2に菓子パンPを待ち受けさせる。
図4、7に示されるように、移動機構3は、菓子パンPを掬い取った掬い取り部2を、番重7の上方に移動させる。後述するように、掬い取り部2に掬い取られた菓子パンPは、押出機構4の動作により掬い取り部2から番重7内に落下する。移動機構3は、番重7内の菓子パンPが落下するべき所定の位置Q(図4参照)に菓子パンPを落下させることが可能な位置に、掬い取り部2を移動させる。
図3、4に示されるように、押出機構4は、押出部41と、アクチュエータ40と、連結板42とを備えている。
制御部8は、CPU、記憶装置等により構成されている。制御部8は、記憶装置に予め記憶された所定のプログラムに従って、移動機構3、押出機構4、および番重移動装置9の動作を制御する。
2 掬い取り部
2a 底板部
2b 側壁部
3 移動機構(移動手段)
4 押出機構(押出手段)
5 アレイセンサ(検出手段)
5a 光電センサ
6 ベルトコンベア
6a ベルト
7 番重(箱)
40 アクチュエータ
41 押出部
A ベルト走行方向
B ベルト幅方向
P 菓子パン(食品)
S 空間
Claims (6)
- ベルトコンベアのベルトに載って搬送されてくる食品をその下流側の位置で待ち受けて、到来した食品を前記ベルト上で掬い取る掬い取り部と、
食品を掬い取った前記掬い取り部を、食品の箱詰め用に準備された箱の近くに移動させる移動手段と、
前記移動手段の動作により前記箱の近くに移動した前記掬い取り部から食品を押し出し、その押し出しにより前記掬い取り部から前記箱内に食品を移す押出手段と、を備えた食品箱詰め装置。 - 前記ベルトの上方に配置されて、前記ベルトに載っている食品が通過するベルト幅方向の位置を検出する検出手段を備え、
前記移動手段は、前記検出手段で検出された食品のベルト幅方向の位置でかつ前記検出手段よりも下流側の位置に前記掬い取り部を移動させて、その移動先の位置で前記掬い取り部に食品を待ち受けさせた後に、食品を掬い取った前記掬い取り部を前記箱の近くに移動させることを特徴とする、請求項1に記載の食品箱詰め装置。 - 前記検出手段は、前記ベルトの幅方向に沿って並ぶ複数の光電センサを有し、当該複数の光電センサにより、食品のベルト幅方向の位置を検出することを特徴とする、請求項2に記載の食品箱詰め装置。
- 前記掬い取り部は、前記ベルトの走行方向に沿って延びて、食品を掬い取る底板部と、前記底板部における前記走行方向と直交する方向の両端部から立ち上がる側壁部とを有し、
前記押出手段は、前記掬い取り部の前記底板部と各前記側壁部とで囲まれる空間内に配置される押出部と、前記移動手段の動作により前記掬い取り部が前記箱の上方に到達したときに、前記掬い取り部および前記押出部の少なくとも一方を前記底板部の長手方向に沿って相対的に移動させるアクチュエータとを備え、
前記アクチュエータは、前記底板部におけるその長手方向の一端部と前記押出部との間の部分に食品が載った状態で、その食品を前記底板部の前記一端部から押し出すように、前記掬い取り部および前記押出部の少なくとも一方を移動させることを特徴とする、請求項1乃至3のいずれかに記載の食品箱詰め装置。 - 前記アクチュエータは、前記押出部を移動させずに、前記底板部の前記一端部が前記押出部に近づくように前記掬い取り部を移動させることを特徴とする、請求項4に記載の食品箱詰め装置。
- 前記食品は、袋詰めのパンであることを特徴とする、請求項1乃至5のいずれかに記載の食品箱詰め装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015049885A JP6511300B2 (ja) | 2015-03-12 | 2015-03-12 | 食品箱詰め装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015049885A JP6511300B2 (ja) | 2015-03-12 | 2015-03-12 | 食品箱詰め装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2016169032A true JP2016169032A (ja) | 2016-09-23 |
| JP6511300B2 JP6511300B2 (ja) | 2019-05-15 |
Family
ID=56981998
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015049885A Active JP6511300B2 (ja) | 2015-03-12 | 2015-03-12 | 食品箱詰め装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6511300B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2024122917A (ja) * | 2023-02-28 | 2024-09-09 | マルハニチロ株式会社 | 冷凍食品 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7783926B2 (ja) | 2024-02-27 | 2025-12-10 | 株式会社ソディック | 食材用搬送装置 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001047386A (ja) * | 1999-08-10 | 2001-02-20 | Shikoku Kohan Kk | 物品の箱詰め作業用のロボットハンドとロボットハンドを使用した箱詰め方法 |
| JP2007008583A (ja) * | 2005-06-01 | 2007-01-18 | Ishida Co Ltd | 包装システム |
| JP2013006609A (ja) * | 2011-06-23 | 2013-01-10 | Omori Mach Co Ltd | 耳折り装置 |
| JP2014198571A (ja) * | 2013-03-29 | 2014-10-23 | 古川機工株式会社 | 物品把持装置と容器詰め装置 |
-
2015
- 2015-03-12 JP JP2015049885A patent/JP6511300B2/ja active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001047386A (ja) * | 1999-08-10 | 2001-02-20 | Shikoku Kohan Kk | 物品の箱詰め作業用のロボットハンドとロボットハンドを使用した箱詰め方法 |
| JP2007008583A (ja) * | 2005-06-01 | 2007-01-18 | Ishida Co Ltd | 包装システム |
| JP2013006609A (ja) * | 2011-06-23 | 2013-01-10 | Omori Mach Co Ltd | 耳折り装置 |
| JP2014198571A (ja) * | 2013-03-29 | 2014-10-23 | 古川機工株式会社 | 物品把持装置と容器詰め装置 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2024122917A (ja) * | 2023-02-28 | 2024-09-09 | マルハニチロ株式会社 | 冷凍食品 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6511300B2 (ja) | 2019-05-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US12037194B2 (en) | Robot system with motion sequences adapted to product types, and operating method therefor | |
| RS63326B1 (sr) | Postupak i sistem za pripremanje robe koja je već stavljena u složive kontejnere za komadnu robu na paletama sa artiklima u skladištu sa paletama na ciljnu paletu | |
| US8074431B1 (en) | Hybrid palletizer | |
| JP6558650B2 (ja) | 積層食品袋詰めシステム、積み重ね装置、移送装置 | |
| WO2009146117A2 (en) | Automated collector device and methods | |
| US5765337A (en) | Apparatus and method for stacking and boxing stackable articles | |
| KR102402122B1 (ko) | 가공식품 적층장치 | |
| JPWO2017154719A1 (ja) | 物品移送装置 | |
| US20200361646A1 (en) | Food conveyor and packaging systems and methods | |
| EP3453657A1 (en) | Sliding layer gripping device and relative layer transfer method | |
| US6220424B1 (en) | Method and apparatus for transferring items from a conveyor | |
| JP2022546976A (ja) | コンテナに食品アイテムを充填するための方法及び装置 | |
| US12428181B2 (en) | System and method for handling packaging units, and manipulator unit | |
| JP2016169032A (ja) | 食品箱詰め装置 | |
| JP2020521682A (ja) | 卵のような丸い物品用の包装装置 | |
| US20040136814A1 (en) | Method and device for transferring baking trays and a load carrier therefore | |
| US7788886B2 (en) | Apparatus and method for loading containers with bags | |
| JP2018194362A (ja) | 食品把持移載装置及び食品把持移載方法 | |
| CN110902400A (zh) | 异型烟拆垛机及拆垛流水线 | |
| CN118765255A (zh) | 滑托板移除设备 | |
| EP4230538A1 (en) | A gripper for a handling device | |
| JP6964341B2 (ja) | 食材盛付装置 | |
| JP6417439B1 (ja) | 食品配列装置 | |
| WO2007104927A2 (en) | Gripper device | |
| KR101388067B1 (ko) | 포장 대상물 자동 적재장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180123 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20181225 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190108 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190206 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190402 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190408 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6511300 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |