JP2016174346A - 送信回路、半導体装置及びデータ送信方法 - Google Patents
送信回路、半導体装置及びデータ送信方法 Download PDFInfo
- Publication number
- JP2016174346A JP2016174346A JP2015180395A JP2015180395A JP2016174346A JP 2016174346 A JP2016174346 A JP 2016174346A JP 2015180395 A JP2015180395 A JP 2015180395A JP 2015180395 A JP2015180395 A JP 2015180395A JP 2016174346 A JP2016174346 A JP 2016174346A
- Authority
- JP
- Japan
- Prior art keywords
- output
- circuit
- signal
- stop
- power supply
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images















Classifications
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03K—PULSE TECHNIQUE
- H03K5/00—Manipulating of pulses not covered by one of the other main groups of this subclass
- H03K5/19—Monitoring patterns of pulse trains
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10W—GENERIC PACKAGES, INTERCONNECTIONS, CONNECTORS OR OTHER CONSTRUCTIONAL DETAILS OF DEVICES COVERED BY CLASS H10
- H10W72/00—Interconnections or connectors in packages
- H10W72/50—Bond wires
- H10W72/541—Dispositions of bond wires
- H10W72/5445—Dispositions of bond wires being orthogonal to a side surface of the chip, e.g. parallel arrangements
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10W—GENERIC PACKAGES, INTERCONNECTIONS, CONNECTORS OR OTHER CONSTRUCTIONAL DETAILS OF DEVICES COVERED BY CLASS H10
- H10W90/00—Package configurations
- H10W90/701—Package configurations characterised by the relative positions of pads or connectors relative to package parts
- H10W90/751—Package configurations characterised by the relative positions of pads or connectors relative to package parts of bond wires
- H10W90/753—Package configurations characterised by the relative positions of pads or connectors relative to package parts of bond wires between laterally-adjacent chips
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Nonlinear Science (AREA)
- Computer Hardware Design (AREA)
- Dc Digital Transmission (AREA)
- Electronic Switches (AREA)
- Mathematical Physics (AREA)
- Power Engineering (AREA)
- Computer Networks & Wireless Communication (AREA)
- Signal Processing (AREA)
- Logic Circuits (AREA)
- General Engineering & Computer Science (AREA)
- Semiconductor Integrated Circuits (AREA)
- Computing Systems (AREA)
Abstract
【解決手段】一実施の形態に係る送信回路は、入力データのエッジに基づくパルス信号を生成するパルス生成回路と、パルス信号に基づいて、前記エッジの一方に係る第1の出力パルス信号を外部の絶縁結合素子の第1端に出力する第1の出力ドライバと、パルス信号に基づいて、前記エッジの他方に係る第2の出力パルス信号を絶縁結合素子の第2端に出力する第2の出力ドライバと、電源電圧の起動から所定の期間、第1及び第2の出力パルス信号の出力を停止する出力停止回路と、を備える。
【選択図】図1
Description
特許文献1に示したようなマイクロアイソレータにおいて、例えば静電破壊試験の1つである人体モデル(HBM:Human Body Model)試験を行った際に、送信回路の破壊や絶縁結合素子の断線などの故障が発生し得ることが分かった。このような故障は、サージ電流印加によって、電源電圧が規定電圧を超えるとともに、送信回路が誤パルスを出力するために起こることが分かった。
以上のように、従来の静電保護回路では、静電破壊試験時の故障を効果的に抑制することができない。
<半導体装置1の構成>
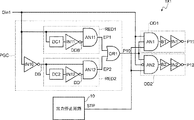
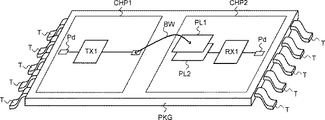
まず、図1を参照して、第1の実施の形態に係る半導体装置について説明する。図1は、第1の実施の形態に係る半導体装置1の構成を示すブロック図である。第1の実施の形態に係る半導体装置1は、送信回路TX1、一次コイルL11、二次コイルL12、受信回路RX1を備え、マイクロアイソレータを構成している。
さらに、半導体チップCHP1に一次コイルL11及び送信回路TX1を形成し、半導体チップCHP2に二次コイルL12及び受信回路RX1を形成し、両者を貼り合わせてもよい。
あるいは、1つの半導体チップ上に送信回路TX1、受信回路RX1、一次コイルL11及び二次コイルL12が形成されていてもよい。この場合、送信回路TX1が配置される領域と受信回路RX1が配置される領域とは、半導体チップ中に形成される絶縁層により互いに絶縁される。
パルス生成回路PGCは、入力データ信号Din1のエッジに応じて、パルス信号P10を生成する。
出力ドライバOD2は、パルス信号P10に基づく出力パルス信号P12を一次コイルL11の第2端に出力する。出力パルス信号P12は、入力データ信号Din1のフォールエッジを伝達するためのパルス信号である。
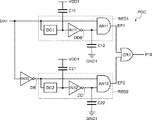
次に、図3を参照して、送信回路TX1の具体的な回路構成について説明する。以下に示す回路構成はあくまでも一例である。図3は、第1の実施の形態に係る送信回路TX1の具体的な回路構成の一例を示す回路図である。図1、図3に示すように、送信回路TX1は、パルス生成回路PGC、出力ドライバOD1、OD2、出力停止回路10を備えている。
なお、図3に示すように、出力ドライバOD1には入力データ信号Din1が入力されるのに対し、出力ドライバOD2には入力データ信号Din1の反転信号が入力される点が異なる。すなわち、ANDゲートAN2は、入力データ信号Din1の入力端にインバータを備えている。
ライズエッジ検出回路RED1には、入力データ信号Din1が入力される。ライズエッジ検出回路RED1は、入力データ信号Din1のライズエッジにおいてエッジパルス信号EP1を出力する。具体的には、入力データ信号Din1は、遅延回路DC1によって遅延され、インバータIN11によって反転される。このインバータIN11から出力された反転遅延データ信号DDBが、入力データ信号Din1とともにANDゲートAN11に入力される。そして、ANDゲートAN11が、エッジパルス信号EP1を出力する。
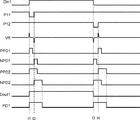
次に、図4を参照して、送信回路TX1の通常動作について説明する。図4は、第1の実施の形態に係る送信回路TX1の通常動作の一例を示すタイミングチャートである。なお、図4に示す通常動作時は、出力停止回路10は作動しない。
3段目に示されたエッジパルス信号EP1は、最上段に示された入力データ信号Din1のライズエッジを示す幅Tdのパルス信号である。エッジパルス信号EP1は、最上段に示された入力データ信号Din1と2段目に示された反転遅延データ信号DDBとのAND論理により得られる。
5段目に示された正転遅延データ信号DDは、最上段に示された入力データ信号Din1を遅延時間Tdだけ遅延させた信号である。
6段目に示されたエッジパルス信号EP2は、最上段に示された入力データ信号Din1のフォールエッジを示す幅Tdのパルス信号である。エッジパルス信号EP2は、4段目に示された反転データ信号DBと5段目に示された正転遅延データ信号DDとのAND論理により得られる。
時刻t1では、最上段に示された入力データ信号Din1がLレベルからHレベルへ切り換わる(つまりライズエッジ)。そのため、3段目に示されたエッジパルス信号EP1及び7段目に示されたパルス信号P10がLレベルからHレベルに切り換わり、8段目に示された出力パルス信号P11がHレベルからLレベルに切り換わる。
次に、図5を参照して、受信回路RX1の具体的な回路構成について説明する。以下に示す回路構成はあくまでも一例である。図5は、第1の実施の形態に係る受信回路RX1の具体的な回路構成の一例を示す回路図である。図5に示すように、受信回路RX1は、パルス検出回路PDCと2つのパルス拡幅回路PWC1、PWC2、順序回路SLC、ORゲートOR2を備えている。
送信回路TX1から出力された出力パルス信号P11、P12に応じて二次コイルL12の両端間に発生する受信信号VRは、パルス検出回路PDCに入力される。パルス検出回路PDCは、正パルスを検出した場合は正パルス検出信号PPD1を、負パルスを検出した場合は負パルス検出信号NPD1を出力する。具体的には、送信回路TX1から出力パルス信号P11、P12が出力されると、いずれの場合も1対の正パルス検出信号PPD1、負パルス検出信号NPD1が出力される。しかし、出力パルス信号P11と出力パルス信号P12とでは、正パルス検出信号PPD1と負パルス検出信号NPD1との出力順序が逆転する。本実施の形態では、出力パルス信号P11が出力されると正パルス検出信号PPD1が先に出力され、出力パルス信号P12が出力されると負パルス検出信号NPD1が先に出力される。
次に、図6を参照して、受信回路RX1の動作について説明する。図6は、第1の実施の形態に係る受信回路RX1の動作の一例を示すタイミングチャートである。図6の上から順に、送信回路TX1の入力データ信号Din1、送信回路TX1から出力された出力パルス信号P11、P12、二次コイルL12の受信信号VR、正パルス検出信号PPD1、負パルス検出信号NPD1、正パルス検出信号PPD2、負パルス検出信号NPD2、出力データ信号Dout1、パルス検出信号PD1が、示されている。
6段目に示された負パルス検出信号NPD1は、受信信号VRの負パルス発生タイミングにおいて出力される。
8段目に示された負パルス検出信号NPD2は、パルス拡幅回路PWC2において負パルス検出信号NPD1のフォールエッジを遅延させることにより拡幅された信号である。
最下段に示されたパルス検出信号PD1は、出力パルス信号P11もしくは出力パルス信号P12のどちらかが出力される毎に出力される信号である。上述の通り、正パルス検出信号PPD2及び負パルス検出信号NPD2から生成される。
時刻t1では、出力パルス信号P11がHレベルからLレベルへ切り換わるため、受信信号VRに正パルスが発生する。そのため、時刻t1では、正パルス検出信号PPD1、PPD2がLレベルからHレベルへ切り換わる。正パルス検出信号PPD2がLレベルからHレベルへ切り換わった結果、出力データ信号Dout1として、Hレベルが出力される。
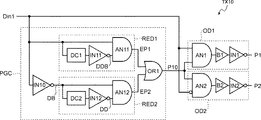
次に、図7を参照して、第1の実施の形態の比較例に係る送信回路TX10について説明する。図7は、第1の実施の形態の比較例に係る送信回路TX10の具体的な回路構成の一例を示す回路図である。図7に示すように、送信回路TX10は、図3に示した本第1の実施の形態に係る送信回路TX1と比べ、出力停止回路10を備えていない。その他の構成は、図3に示した本第1の実施の形態に係る送信回路TX1と同様である。
次に、図8を参照し、比較例に係る送信回路TX10において、HBM試験時の故障が発生するメカニズムについて説明する。図8は、比較例に係る送信回路TX10において、HBM試験時の故障が発生するメカニズムについて説明するためのタイミングチャートである。図8の上から順に、電源電圧VDD1、入力データ信号Din1、パルス信号P10、出力パルス信号P1、出力パルス信号P2が、示されている。
2段目に示したように、入力データ信号Din1は、Lレベルのままである。
次に、図9を参照し、図3に示した本実施の形態に係る送信回路TX1において、HBM試験時の故障を抑制するメカニズムについて説明する。図9は、送信回路TX1において、HBM試験時の故障を抑制するメカニズムについて説明するためのタイミングチャートである。
従って、5段目に示したように、出力パルス信号P11、P12は同一波形となり、いずれにも誤パルスは発生しない。すなわち、出力パルス信号P11、P12は同電位となり、一次コイルL11には電流が流れない。この結果、出力ドライバOD1、OD2の破壊や一次コイルL11の断線などの故障を抑制することができる。
次に、図10を参照して、第1の実施の形態に係る出力停止回路10の具体的な回路構成について説明する。以下に示す回路構成はあくまでも一例である。図10は、第1の実施の形態に係る出力停止回路10の具体的な回路構成の一例を示す回路図である。図10に示すように、出力停止回路10は、抵抗素子R1、容量素子C1、インバータIN21を備えている。
次に、図11を参照し、第1の実施の形態に係る出力停止回路10の電源電圧起動時の動作を説明する。図11は、第1の実施の形態に係る出力停止回路10の電源電圧起動時の動作を説明するためのタイミングチャートである。図11の上から順に、電源電圧VDD1、インバータIN21の入力N1の電圧、停止信号STPが、示されている。
停止期間は、抵抗素子R1と容量素子C1との時定数により決定される。
図12、図13は、第1の実施の形態に係る送信回路TX1の変形例を示す回路図である。
図3に示した送信回路TX1では、出力ドライバOD1、OD2を構成するANDゲートAN1、AN2に停止信号STPが入力されている。
これに対し、図12に示した送信回路TX1では、出力ドライバOD1、OD2を構成するインバータIN1、IN2の前段にANDゲートAN21、AN22を設け、停止信号STPを入力している。
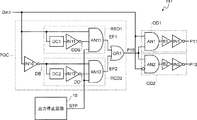
また、図13に示した送信回路TX1では、ライズエッジ検出回路RED1、RED2を構成するANDゲートAN11、AN12に停止信号STPを入力している。
なお、図13に示した回路構成では、パルス生成回路PGCから出力されるパルス信号P10における誤パルスの発生自体が抑制される。
図14は、第1の実施の形態に係るパルス生成回路PGCの変形例を示す回路図である。図14に示したパルス生成回路PGCでは、遅延回路DC1、DC2の出力が、それぞれ容量素子C11、C21を介して電源に接続されている。また、インバータIN11、IN12の出力が、それぞれ容量素子C12、C22を介して接地されている。
この場合、ANDゲートAN12の一方の入力は、反転データ信号DBであるためHレベルとなる。しかしながら、遅延回路DC2の出力が容量素子C21を介して電源に接続され、インバータIN12の出力が容量素子C22を介して接地されている。そのため、ANDゲートAN12の他方の入力であるインバータIN12の出力は安定してLレベルとなる。従って、ANDゲートAN12の出力もLレベルとなる。
この場合、ANDゲートAN12の一方の入力は反転データ信号DBであるためLレベルとなり、ANDゲートAN12の出力もLレベルとなる。
なお、遅延回路DC1、DC2が複数のインバータから構成されている場合、容量素子を介して各インバータの出力を交互に電源もしくはグランドに接続することが好ましい。
<出力停止回路20の構成>
次に、図15を参照して、第2の実施の形態に係る送信回路TX1について説明する。図15は、第2の実施の形態に係る出力停止回路20の具体的な回路構成の一例を示す回路図である。図15に示すように、出力停止回路20は、NMOSトランジスタNM1、PMOSトランジスタPM1、容量素子C1、C2、インバータIN21を備えている。出力停止回路20以外の送信回路TX1の構成は、第1の実施の形態に係る送信回路TX1と同様である。
そして、インバータIN21から停止信号STPが出力される。
次に、図16を参照し、第2の実施の形態に係る出力停止回路20の電源電圧起動時の動作を説明する。図16は、第2の実施の形態に係る出力停止回路20の電源電圧起動時の動作を説明するためのタイミングチャートである。図16の上から順に、電源電圧VDD1、インバータIN21の入力(すなわちPMOSトランジスタPM1のゲート)N1及びNMOSトランジスタNM1のゲートN2の電圧、停止信号STPが、示されている。
これに伴い、3段目に示すように、停止信号STPは、LレベルからHレベルへ遷移する。停止信号STPがLレベルの期間、出力パルス信号P11、P12の出力は停止される。
<出力停止回路30の構成>
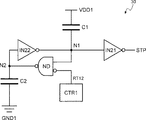
次に、図17を参照して、第3の実施の形態に係る送信回路TX1について説明する。図17は、第3の実施の形態に係る出力停止回路30の具体的な回路構成の一例を示す回路図である。図17に示すように、出力停止回路30は、NANDゲートND、容量素子C1、C2、インバータIN21、IN22、カウンタCTR1を備えている。出力停止回路30以外の送信回路TX1の構成は、第1の実施の形態に係る送信回路TX1と同様である。
換言すると、ラッチ回路の記憶ノードN1が容量素子C1を介して電源に接続され、記憶ノードN2が容量素子C2を介して接地されている。ラッチ回路の記憶ノードN1、N2には、互いに反転された電圧が保持される。
NANDゲートNDには、カウンタCTR1から出力される定期要求信号RT12の反転信号が入力される。
そして、インバータIN21から停止信号STPが出力される。
次に、図18を参照し、第3の実施の形態に係る出力停止回路30の電源電圧起動時の動作を説明する。図18は、第3の実施の形態に係る出力停止回路30の電源電圧起動時の動作を説明するためのタイミングチャートである。図18の上から順に、電源電圧VDD1、記憶ノードN1、N2の電圧、定期要求信号RT12、停止信号STPが、示されている。
このように、インバータIN22とNANDゲートNDとから構成されるラッチ回路は、電源電圧の起動を検知し、停止信号STPをLレベルに維持する。そして、ラッチ回路は、タイマであるカウンタCTR1から出力された定期要求信号RT12に応じて、停止信号STPをHレベルに切り換える。
次に、図19を参照して、第3の実施の形態に係る送信回路TX1を用いた半導体装置システム2について説明する。図19は、第3の実施の形態に係る半導体装置システム2の構成を示すブロック図である。第3の実施の形態に係る半導体装置システム2は、2つの送信回路TX1、TX2、一次コイルL11、L21、二次コイルL12、L22、2つの受信回路RX1、RX2、2つの発振回路OSC1、OSC2、2つのカウンタCTR1、CTR2、2つのタイマTM1、TM2、2つの低電ロックアウト(UVLO:Under Voltage Lock Out)回路UVLO1、UVLO2、2つANDゲートA1、A2、6つのORゲートO1〜O6を備えている。
マイコンMCUから出力された制御信号CNT1が、入力データ信号Din1として、送信回路TX1に入力される。また、送信回路TX1には、UVLO回路UVLO1から出力される不定期要求信号RT11、カウンタCTR1から出力される定期要求信号RT12も入力される。
つまり、マイコンMCUから出力された制御信号CNT1が、送信回路TX1及び受信回路RX1を介して、制御信号CNT2としてパワートランジスタドライバPTDに入力される。
つまり、エラー検出回路EDCから出力されたエラー検出信号ED1が、送信回路TX2及び受信回路RX2を介して、エラー検出信号ED2としてマイコンMCUに入力される。
以下に詳細な構成及び信号の流れについて説明する。
マイコンMCUから出力された制御信号CNT1が、ANDゲートA1を介して、入力データ信号Din1として送信回路TX1に入力される。ここで、ANDゲートA1には、UVLO回路UVLO1から出力される不定期要求信号RT11の反転信号も入力される。
半導体装置システム2の制御対象は、例えば、絶縁ゲートバイポーラトランジスタ(IGBT:Insulated Gate Bipolar Transistor)に代表されるパワートランジスタである。この場合、半導体装置システム2は、受信回路RX1によって再生されたデータDout1に応じてパワートランジスタのオンオフを制御することにより、電源と負荷との間の導通状態を制御する。
半導体装置の実装例は、図2に示した実装例に限られるものではない。以下、代表して、半導体装置の他の実装例について、図22、図23を用いて説明する。図22は、絶縁結合素子としてコンデンサが用いた場合の半導体装置の実装例である。図23は、絶縁結合素子としてGMR素子を用いた場合の半導体装置の実装例である。
例えば、上記の実施の形態に係る半導体装置では、半導体基板、半導体層、拡散層(拡散領域)などの導電型(p型もしくはn型)を反転させた構成としてもよい。そのため、n型、及びp型の一方の導電型を第1の導電型とし、他方の導電型を第2の導電型とした場合、第1の導電型をp型、第2の導電型をn型とすることもできるし、反対に第1の導電型をn型、第2の導電型をp型とすることもできる。
2 半導体装置システム
10、20、30 出力停止回路
A1、A2、AN1、AN2、AN11、AN12、AN21、AN22 ANDゲート
B1、B2 バッファ回路
BW ボンディングワイヤ
C1、C2、C11、C12、C21、C22 容量素子
CHP1、CHP2 半導体チップ
CTR1、CTR2 カウンタ
DC1、DC2 遅延回路
EDC エラー検出回路
IN1、IN2、IN10、IN11、IN12、IN21、IN22 インバータ
L11、L21 一次コイル
L12 L22 二次コイル
MCU マイコン
ND NANDゲート
NM1 NMOSトランジスタ
O1−O6、OR1、OR2 ORゲート
OD1、OD2 出力ドライバ
OSC1、OSC2 発振回路
Pd パッド
PDC パルス検出回路
PGC パルス生成回路
PKG 半導体パッケージ
PL1、PL2 電極
PM1 PMOSトランジスタ
PTD パワートランジスタドライバ
PWC1、PWC2 パルス拡幅回路
R1 抵抗素子
R12 GMR素子
RED1、RED2 ライズエッジ検出回路
RX1、RX2 受信回路
SLC 順序回路
T リード端子
TM1、TM2 タイマ
TX1、TX2 送信回路
UVLO1、UVLO2 UVLO回路
Claims (15)
- 入力データのエッジに基づくパルス信号を生成するパルス生成回路と、
前記パルス信号に基づいて、前記エッジの一方に係る第1の出力パルス信号を外部の絶縁結合素子の第1端に出力する第1の出力ドライバと、
前記パルス信号に基づいて、前記エッジの他方に係る第2の出力パルス信号を前記絶縁結合素子の第2端に出力する第2の出力ドライバと、
電源電圧の起動から所定の期間、前記第1及び第2の出力パルス信号の出力を停止する出力停止回路と、を備える、
送信回路。 - 前記出力停止回路は、
前記電源電圧の起動を検知し、前記第1及び第2の出力パルス信号の出力の停止を維持するラッチ回路と、
タイマと、を備え、
前記ラッチ回路は、前記タイマから出力された信号に応じて、前記第1及び第2の出力パルス信号の出力の停止を解除する、
請求項1に記載の送信回路。 - 前記出力停止回路は、
第1及び第2の容量素子をさらに備え、
前記ラッチ回路は、
第1の記憶ノードが前記第1の容量素子を介して電源に接続され、第2の記憶ノードが前記第2の容量素子を介してグランドに接続されており、
前記第1及び第2の記憶ノードに互いに反転させた電圧を保持し、
前記タイマから出力された信号に応じて、前記第1及び第2の記憶ノードに保持された前記電圧が遷移することにより、前記第1及び第2の出力パルス信号の出力の停止を解除する、
請求項2に記載の送信回路。 - 前記出力停止回路は、
第1及び第2の容量素子と、
ソースがグランドに接続され、ドレインが前記第1の容量素子を介して電源に接続されたN型トランジスタと、
ソースが電源に接続され、ドレインが前記第2の容量素子を介してグランドに接続されたP型トランジスタと、を備え、
前記N型トランジスタのゲートは前記P型トランジスタのドレインに接続され、前記P型トランジスタのゲートは前記N型トランジスタのドレインに接続されており、
前記N型トランジスタのゲート電圧と前記P型トランジスタのゲート電圧とに応じて、前記第1及び第2の出力パルス信号の出力の停止が解除される、
請求項1に記載の送信回路。 - 前記出力停止回路は、
電源及びグランドのいずれか一方に接続された容量素子と、
電源及びグランドの他方に接続された抵抗素子と、を備え、
前記容量素子と前記抵抗素子との接続ノードの電圧に応じて、前記第1及び第2の出力パルス信号の出力の停止が解除される、
請求項1に記載の送信回路。 - 前記出力停止回路が、
電源電圧の起動から所定の期間、前記パルス生成回路による前記パルス信号の生成を停止することにより、前記第1及び第2の出力パルス信号の出力を停止する、
請求項1に記載の送信回路。 - 入力データに基づく第1及び第2の出力パルス信号を送信する送信回路と、
前記第1及び第2の出力パルス信号を受信し、前記入力データを復元する受信回路と、
前記送信回路と前記受信回路とを電磁気的に結合する一次絶縁結合素子及び二次絶縁結合素子と、を備え、
前記送信回路は、
前記入力データのエッジに基づくパルス信号を生成するパルス生成回路と、
前記パルス信号に基づいて、前記エッジの一方に係る前記第1の出力パルス信号を前記一次絶縁結合素子の第1端に出力する第1の出力ドライバと、
前記パルス信号に基づいて、前記エッジの他方に係る前記第2の出力パルス信号を前記一次絶縁結合素子の第2端に出力する第2の出力ドライバと、
電源電圧の起動から所定の期間、前記第1及び第2の出力パルス信号の出力を停止する出力停止回路と、を備える、
半導体装置。 - 前記出力停止回路は、
前記電源電圧の起動を検知し、前記第1及び第2の出力パルス信号の出力の停止を維持するラッチ回路と、
タイマと、を備え、
前記ラッチ回路は、前記タイマから出力された信号に応じて、前記第1及び第2の出力パルス信号の出力の停止を解除する、
請求項7に記載の半導体装置。 - 前記出力停止回路は、
第1及び第2の容量素子をさらに備え、
前記ラッチ回路は、
第1の記憶ノードが前記第1の容量素子を介して電源に接続され、第2の記憶ノードが前記第2の容量素子を介してグランドに接続されており、
前記第1及び第2の記憶ノードに互いに反転させた電圧を保持し、
前記タイマから出力された信号に応じて、前記第1及び第2の記憶ノードに保持された前記電圧が遷移することにより、前記第1及び第2の出力パルス信号の出力の停止を解除する、
請求項8に記載の半導体装置。 - 前記出力停止回路は、
第1及び第2の容量素子と、
ソースがグランドに接続され、ドレインが前記第1の容量素子を介して電源に接続されたN型トランジスタと、
ソースが電源に接続され、ドレインが前記第2の容量素子を介してグランドに接続されたP型トランジスタと、を備え、
前記N型トランジスタのゲートは前記P型トランジスタのドレインに接続され、前記P型トランジスタのゲートは前記N型トランジスタのドレインに接続されており、
前記N型トランジスタのゲート電圧と前記P型トランジスタのゲート電圧とに応じて、前記第1及び第2の出力パルス信号の出力の停止が解除される、
請求項7に記載の半導体装置。 - 前記出力停止回路は、
電源及びグランドのいずれか一方に接続された容量素子と、
電源及びグランドの他方に接続された抵抗素子と、を備え、
前記容量素子と前記抵抗素子との接続ノードの電圧に応じて、前記第1及び第2の出力パルス信号の出力の停止が解除される、
請求項7に記載の半導体装置。 - 前記出力停止回路が、
電源電圧の起動から所定の期間、前記パルス生成回路による前記パルス信号の生成を停止することにより、前記第1及び第2の出力パルス信号の出力を停止する、
請求項7に記載の半導体装置。 - 前記一次絶縁結合素子及び前記二次絶縁結合素子は、
半導体チップ内において、上下方向に積層された2層の配線層のそれぞれに形成されたコイルである、
請求項7に記載の半導体装置。 - 入力データのエッジに基づくパルス信号を生成し、
前記パルス信号に基づいて、前記エッジの一方に係る第1の出力パルス信号を絶縁結合素子の第1端に出力するとともに、前記エッジの他方に係る第2の出力パルス信号を前記絶縁結合素子の第2端に出力するデータ送信方法であって、
電源電圧の起動から所定の期間、前記第1及び第2の出力パルス信号の出力を停止する、
データ送信方法。 - 前記第1及び第2の出力パルス信号の出力を停止する際、
前記電源電圧の起動を検知し、前記第1及び第2の出力パルス信号の出力の停止を維持し、
タイマから出力された信号に応じて、前記第1及び第2の出力パルス信号の出力の停止を解除する、
請求項14に記載のデータ送信方法。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| TW105105641A TWI692226B (zh) | 2015-03-17 | 2016-02-25 | 發射器電路、半導體裝置及資料傳輸方法 |
| EP16158887.6A EP3070896A1 (en) | 2015-03-17 | 2016-03-07 | Transmitter circuit, semiconductor apparatus and data transmission method |
| US15/066,900 US9813084B2 (en) | 2015-03-17 | 2016-03-10 | Transmitter circuit, semiconductor apparatus and data transmission method |
| KR1020160031038A KR20160111863A (ko) | 2015-03-17 | 2016-03-15 | 전송기 회로, 반도체 장치 및 데이터 전송 방법 |
| CN201610152473.2A CN105991115B (zh) | 2015-03-17 | 2016-03-17 | 发送器电路、半导体装置和数据发送方法 |
| US15/727,968 US10224969B2 (en) | 2015-03-17 | 2017-10-09 | Transmitter circuit, semiconductor apparatus and data transmission method |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015053444 | 2015-03-17 | ||
| JP2015053444 | 2015-03-17 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2016174346A true JP2016174346A (ja) | 2016-09-29 |
| JP6557562B2 JP6557562B2 (ja) | 2019-08-07 |
Family
ID=57009127
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015180395A Active JP6557562B2 (ja) | 2015-03-17 | 2015-09-14 | 送信回路及び半導体装置 |
Country Status (4)
| Country | Link |
|---|---|
| JP (1) | JP6557562B2 (ja) |
| KR (1) | KR20160111863A (ja) |
| CN (1) | CN105991115B (ja) |
| TW (1) | TWI692226B (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020010085A (ja) * | 2018-07-03 | 2020-01-16 | ローム株式会社 | 信号伝達装置 |
| JP2023130171A (ja) * | 2022-03-07 | 2023-09-20 | 株式会社東芝 | 通信装置、及び半導体装置 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5637550U (ja) * | 1979-08-30 | 1981-04-09 | ||
| JP2004260648A (ja) * | 2003-02-27 | 2004-09-16 | Nec Corp | パワーオンリセット回路 |
| JP2013229815A (ja) * | 2012-04-26 | 2013-11-07 | Renesas Electronics Corp | 半導体装置及びデータ送信方法 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3110653B2 (ja) * | 1995-06-15 | 2000-11-20 | シャープ株式会社 | 信号伝達装置 |
| US7580233B2 (en) * | 2005-10-21 | 2009-08-25 | Via Technologies, Inc. | Protecting circuits from electrostatic discharge |
| KR20090049290A (ko) * | 2007-11-13 | 2009-05-18 | 삼성전자주식회사 | 멀티 레벨 펄스 진폭 변조 트랜스시버 및 데이터 송수신방법 |
| US8238067B2 (en) * | 2008-12-11 | 2012-08-07 | Ati Technologies Ulc | Electrostatic discharge circuit and method |
| CN102315757B (zh) * | 2010-07-07 | 2014-07-09 | 台达能源技术(上海)有限公司 | 驱动功率开关元件的驱动器 |
| JP2012108087A (ja) * | 2010-10-28 | 2012-06-07 | Seiko Instruments Inc | 温度検知装置 |
| TWI506952B (zh) * | 2011-11-23 | 2015-11-01 | System General Corp | 用於功率管理的隔離介面電路 |
| JP5752659B2 (ja) * | 2012-09-20 | 2015-07-22 | 株式会社東芝 | 半導体回路 |
| US9356442B2 (en) * | 2014-07-08 | 2016-05-31 | Hong Kong Applied Science and Technology Research Institute Company, Limited | Area-efficient clamp for power ring ESD protection using a transmission gate |
-
2015
- 2015-09-14 JP JP2015180395A patent/JP6557562B2/ja active Active
-
2016
- 2016-02-25 TW TW105105641A patent/TWI692226B/zh active
- 2016-03-15 KR KR1020160031038A patent/KR20160111863A/ko not_active Withdrawn
- 2016-03-17 CN CN201610152473.2A patent/CN105991115B/zh active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5637550U (ja) * | 1979-08-30 | 1981-04-09 | ||
| JP2004260648A (ja) * | 2003-02-27 | 2004-09-16 | Nec Corp | パワーオンリセット回路 |
| JP2013229815A (ja) * | 2012-04-26 | 2013-11-07 | Renesas Electronics Corp | 半導体装置及びデータ送信方法 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020010085A (ja) * | 2018-07-03 | 2020-01-16 | ローム株式会社 | 信号伝達装置 |
| JP2023130171A (ja) * | 2022-03-07 | 2023-09-20 | 株式会社東芝 | 通信装置、及び半導体装置 |
| US12278567B2 (en) | 2022-03-07 | 2025-04-15 | Kabushiki Kaisha Toshiba | Communication apparatus and semiconductor device |
| JP7675676B2 (ja) | 2022-03-07 | 2025-05-13 | 株式会社東芝 | 通信装置、及び半導体装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| TWI692226B (zh) | 2020-04-21 |
| KR20160111863A (ko) | 2016-09-27 |
| CN105991115A (zh) | 2016-10-05 |
| JP6557562B2 (ja) | 2019-08-07 |
| TW201705730A (zh) | 2017-02-01 |
| CN105991115B (zh) | 2021-01-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9166738B2 (en) | Semiconductor device and data transmission method | |
| JP5303167B2 (ja) | スイッチ制御装置及びこれを用いたモータ駆動装置 | |
| US8946943B2 (en) | High side switch | |
| JP6384201B2 (ja) | 集積回路装置及び電子機器 | |
| JP5926003B2 (ja) | 信号伝達装置及びこれを用いたモータ駆動装置 | |
| CN103247621B (zh) | 静电放电保护电路 | |
| US10249606B2 (en) | Semiconductor device | |
| JP6043225B2 (ja) | 受信回路及びそれを備えた半導体集積回路 | |
| CN104051453A (zh) | 有源esd保护电路 | |
| US10224969B2 (en) | Transmitter circuit, semiconductor apparatus and data transmission method | |
| JP6456496B2 (ja) | 信号伝達回路及び電力変換装置 | |
| JPWO2010109758A1 (ja) | 通信制御方法及び通信システム | |
| JP6557562B2 (ja) | 送信回路及び半導体装置 | |
| CN103427826B (zh) | 输出电路 | |
| JP2010010419A (ja) | 半導体装置 | |
| EP2919347B1 (en) | Surge-protection circuit and surge-protection method | |
| JP4923652B2 (ja) | 半導体装置 | |
| TWI481193B (zh) | 電子元件 | |
| Hurez et al. | Message Recovered: A Robust Fault Detection and Reporting Method for Galvanically Isolated IGBT Gate Drivers | |
| Hurez et al. | Galvanically Isolated IGBT Gate Driver with Advanced Protections and A Fault Detection and Reporting Method | |
| KR102495033B1 (ko) | 전자 소자 및 이를 포함하는 시스템 | |
| TW201244376A (en) | On-chip power input output interface | |
| JP2010021214A (ja) | 半導体集積回路装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180508 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20181219 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190108 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190228 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190709 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190712 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6557562 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |