JP2016199144A - 無人機システム及び地上無人機及び無人飛行体 - Google Patents
無人機システム及び地上無人機及び無人飛行体 Download PDFInfo
- Publication number
- JP2016199144A JP2016199144A JP2015080405A JP2015080405A JP2016199144A JP 2016199144 A JP2016199144 A JP 2016199144A JP 2015080405 A JP2015080405 A JP 2015080405A JP 2015080405 A JP2015080405 A JP 2015080405A JP 2016199144 A JP2016199144 A JP 2016199144A
- Authority
- JP
- Japan
- Prior art keywords
- unmanned
- drone
- air vehicle
- unmanned aerial
- unmanned air
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images








Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T50/00—Aeronautics or air transport
- Y02T50/60—Efficient propulsion technologies, e.g. for aircraft
Landscapes
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Abstract
Description
地上無人機には陸上を走行する陸上無人機と、海洋、河川等の水上を航行する水上無人機とがあるが、以下では、地上無人機の例として陸上無人機を説明する。
一方で、陸上無人機は、高い位置へのアクセスが困難であるという欠点を有する。
これに対し、無人飛行体にカメラ等の映像取得手段や各種センサ類を搭載し、遠方の情報を入手するシステムも実用化され、高所を含む場所の状況把握、情報収集に活用され始めている。
特に電磁モータによりロータを回転駆動して飛行するものは、取扱いの容易さから手軽に利用されている。
かかる無人飛行体は、高所へのアクセスが容易な反面、搭載可能なペイロードの制約から、飛行に要する電力を供給するバッテリの搭載重量に限りがあるため、飛行時間を要する遠方へのアクセスが困難であった。
このため、これらを解決する構成として、陸上無人機と無人飛行体とを連携した構成が提案されている。
例えば特許文献1には、陸上無人機に無人飛行体を搭載し、該陸上無人機により走行移動し、その後無人飛行体を陸上無人機から離間・浮上させて、高所アクセスを行う構成が記載されている。
この構成によれば、従来GPS(Global Positioning System)などの衛星測位システムによって行っていた無人飛行体の自己位置同定が不要となり、建屋内、トンネル内などの閉鎖空間であっても無人飛行体の陸上無人機への降着、収容が可能となる。
しかし、陸上無人機上の狭い収容部に無人飛行体を降着、収容するためには、無人飛行体の高精度な位置検出・制御が必要なため、制御の簡素化が困難でありコスト高となる課題があった。
給電ケーブルが接続されているバッテリを備える地上無人機と、
前記給電ケーブルを介して前記バッテリと接続され、前記給電ケーブルを介して前記バッテリからの電力供給を受ける無人飛行体とを有する。
このため、無人飛行体の自己位置同定や位置制御を行うことなく、確実、容易に無人飛行体を地上無人機に収容でき、低コストなシステムを実現することが可能となる。
***構成の説明***
以下、実施の形態1による無人機システムの構成について説明する。
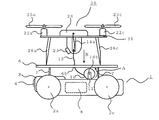
図1は、実施の形態1による無人機システムの要部側面図である。
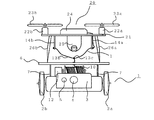
図2は、図1に示す無人機システムの要部正面図である。
図3は、図1に示す無人機システムの要部平面図である。
図4は、実施の形態1による陸上無人機の要部平面図である。
図5は、実施の形態1による無人機システムとコントローラとオペレータとの関係を示すブロック図である。
陸上無人機1には、図示しない駆動源により駆動される車輪2a、2b、2c、2dが回動自在に配置されている。
陸上無人機1は、撮像手段3を備える。
撮像手段3は、カメラ4、照明手段5を具備し、図示しない機構により任意方向の撮像が可能な構成としている。
デッキ6は、後述する無人飛行体20を積載するための積載台である。
デッキ6は、陸上無人機1の上面に、支柱7により配設され、無人飛行体20を載置可能としている。
バッテリ8は、陸上無人機1の内部に搭載され、陸上無人機1ならびに無人飛行体20に電力を供給する。
無人飛行体20は、フレーム21の4隅に、電磁モータ22a、22b、22c、22dにより駆動されるロータ23a、23b、23c、23dが配設されてなる。
制御回路部24は、フレーム21の略中央部付近に配設される。
パンチルトカメラ25は、フレーム21の略中央部付近下部に配設されており、任意方向の撮像を可能としている。
制御回路部24は、電磁モータ22a、22b、22c、22dの回転数を制御して無人飛行体20の姿勢や位置、高度等を制御するとともに、パンチルトカメラ25を制御し、任意方向の映像を撮像する。
脚部26a、26b、26c、26dは、フレーム21の4隅付近に配設される。
モータ12は、ケーブルドラム10の支軸10bに接続され、ケーブルドラム10を回転駆動する。
ケーブルドラム10とモータ12が、巻回装置に相当する。
また、給電ケーブル13は、デッキ6の略中央に設けられたブシュ6bをとおり、無人飛行体20に接続し、バッテリ8の電力を無人飛行体20の電磁モータ22a、22b、22c、22d、制御回路部24、パンチルトカメラ25などに供給する。
なお、給電ケーブル13は、無人飛行体20近傍で補助ケーブル13bと分岐し、給電ケーブル13及び補助ケーブル13bはフレーム21下面に配設されたブラケット14a、14bに保持される。
なお、給電ケーブル13から補助ケーブル13bが分岐する分岐点13cからブラケット14aに至る給電ケーブル13と、該分岐点13cからブラケット14bに至る補助ケーブル13bは、略同等の長さとすることが望ましい。
コントローラ30と陸上無人機1とは無線あるいは有線により接続される。
コントローラ30は、オペレータ40により入力された陸上無人機1及び/又は無人飛行体20の動作制御指令を陸上無人機1に送信する。
陸上無人機1と無人飛行体20とは無線あるいは有線により接続され、陸上無人機1は、コントローラ30から受信した無人飛行体20の動作制御指令を無人飛行体20に送信する。
コントローラ30は、陸上無人機1及び/又は無人飛行体20に搭載したカメラ4、パンチルトカメラ25により撮像した映像や、陸上無人機1及び/又は無人飛行体20に搭載した図示しないセンサ類から得たデータを陸上無人機1から受信し、遠隔操作を行うオペレータ40に提示する。
次に、以上のように構成された実施の形態1による無人機システムの動作について、図1乃至図7により説明する。
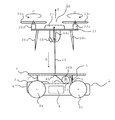
図6は、実施の形態1による無人機システムの無人飛行体の飛行動作を示す要部側面図、図7は、実施の形態1による無人機システムの無人飛行体の、陸上無人機のデッキ上に降着、収容する動作を示す要部側面図である。
この場合には、無人飛行体20は、陸上無人機1の上面に配設されたデッキ6上に載置される。
このとき、給電ケーブル13を巻回したケーブルドラム10をモータ12によりケーブル巻回方向となる図示矢印A方向に回動して給電ケーブル13を図示矢印B方向に巻取り、給電ケーブル13に張力を付与した状態とすることにより、デッキ6からの無人飛行体20の落下を防止する。
無人機システムを遠隔操作するオペレータ40により、陸上無人機1の走行指示がコントローラ30に入力されると、陸上無人機1はコントローラ30から送信される制御指令により制御され、図示しない駆動源により駆動される車輪2a、2b、2c、2dを回動して走行動作を行う。
このとき、陸上無人機1に搭載した撮像手段3のカメラ4により走行方向の映像を撮像し、撮影した画像データをコントローラ30に送信して表示するので、オペレータ40はコントローラ30に表示される映像を見ながら遠隔操作を行うことができる。
同様に、陸上無人機1に搭載した図示しないセンサ類から得たデータもコントローラ30に送信されるので、オペレータ40はそれらのデータを基に陸上無人機1の遠隔操作を行うことができ、確実な操作を行うことが可能となる。
上述の操作により、無人飛行体20を搭載した陸上無人機1を目的地近傍まで移送した後に、無人飛行体20を陸上無人機1から離間、浮上させて飛行動作に移行し、高所へのアクセスを行う。
最初に、陸上無人機1の走行による無人飛行体20のデッキ6からの落下防止を目的として給電ケーブル13に付与していた張力を解除するために、モータ12によるケーブルドラム10の図示矢印A方向への回動制御を終了する。
これにより、ケーブルドラム10は、給電ケーブル13の引き出し動作に応じて自由に回動可能となり、給電ケーブル13の自由な引き出しが可能となる。
次に、オペレータ40により、無人飛行体20の飛行指示がコントローラ30に入力されると、無人飛行体20の制御回路部24はコントローラ30から陸上無人機1を介して送信される制御指令を受け、電磁モータ22a、22b、22c、22dを駆動し、それぞれに取付けられたロータ23a、23b、23c、23dを回転させる。
この際、それぞれ対角となる電磁モータ22aと22dを図示矢印C方向、電磁モータ22bと22cを反対の図示矢印D方向に回転することにより、それぞれのロータ回転駆動によるトルク反力を互いに解消し、無人飛行体20を安定して浮上、飛行させることが可能となる。
無人飛行体20の飛行動作時には、ロータ23a、23b、23c、23dを駆動する電磁モータ22a、22b、22c、22dの回転数を適宜制御することにより、上昇/下降速度、飛行方向、旋回量、などがコントロールされる。
また、このとき無人飛行体20に搭載したパンチルトカメラ25により飛行方向または周囲の映像を撮像し、撮影した画像データを陸上無人機1を介してコントローラ30に送信して表示するので、オペレータ40はコントローラ30に表示される映像を見ながら遠隔操作を行うことができる。
更に、陸上無人機1に搭載した撮像手段3のカメラ4により無人飛行体20の映像を撮像し、撮影した画像データをコントローラ30に送信して表示した場合には、オペレータ40はさらに容易な遠隔操作を行うことが可能となる。
同様に、無人飛行体20に搭載した図示しないセンサ類から得たデータも陸上無人機1を介してコントローラ30に送信されるので、オペレータ40はそれらのデータを基に無人飛行体20の遠隔操作を行うことができ、確実な操作を行うことが可能となる。
即ち、GPS等の衛星測位システムが適用できない建屋内やトンネル内などの閉鎖空間であっても、陸上無人機1の遠隔操作による遠方への移送ができ、さらに目的地付近での高さ方向へのアクセスは、陸上無人機1に搭載した無人飛行体20により行うことができる。
映像やデータ等の情報の入手は、陸上無人機1に搭載した撮像手段3のカメラ4と照明手段5、及び/又は無人飛行体20に搭載したパンチルトカメラ25や、陸上無人機1及び/又は無人飛行体20に搭載した図示しないセンサ類などにより行い、オペレータ40が操作するコントローラ30に送信することが可能である。
これに代えて、モータ12によるケーブルドラム10の図示矢印A方向への回動制御を継続して給電ケーブル13の繰出しを制限したまま、ロータ23a、23b、23c、23dの回転により浮力を発生させ、無人飛行体20の浮上高さを給電ケーブル13の繰出し量により制御することも可能である。
この場合には、給電ケーブル13の繰出し量を計測し、例えば閉鎖空間の天井高さ以下に繰出し量を制限することにより、無人飛行体20の天井への衝突を容易に防止することが可能となり、無人飛行体20の制御が一層容易となる。
無人飛行体20の飛行動作中は、無人飛行体20にはロータ23a、23b、23c、23dの回転による図示矢印E方向への浮力が発生している。
無人飛行体20の質量を超える浮力を発生させた状態で、モータ12によりケーブルドラム10を図示矢印A方向に回動し、給電ケーブル13を図示矢印B方向に巻取り、無人飛行体20を図示矢印B方向に引き降ろす。
ケーブルドラム10に巻取られる給電ケーブル13は、陸上無人機1に配設されたデッキ6の略中央部に設けたブシュ6bをとおり、無人飛行体20に接続しているので、該引き降ろし動作により、無人飛行体20は特別な制御を行うことなく陸上無人機1方向に引き降ろされる。
無人飛行体20の脚部26a、26b、26c、26dがデッキ6に降着したのち、電磁モータ22a、22b、22c、22dの回転駆動を終了し、ロータ23a、23b、23c、23dを停止し、収容動作が完了する。
この後、引き続き、給電ケーブル13を巻回したケーブルドラム10をモータ12により図示矢印A方向に回動制御して給電ケーブル13を図示矢印B方向に巻取り、給電ケーブル13に張力を付与した状態とすることにより、デッキ6からの無人飛行体20の落下を防止できる。
このとき、オペレータ40は、コントローラ30に表示される、陸上無人機1に搭載した撮像手段3から送られてくる映像を見ながら操作を行うことにより、容易に操作が可能になる。
図8は、無人飛行体20が陸上無人機1の略真上付近に浮上している状態を示すモデル図、図9は、無人飛行体20が陸上無人機1の斜め上空に浮上している状態を示すモデル図、図10は、無人飛行体20が陸上無人機1の斜め上空で浮上している状態で、無人飛行体20を給電ケーブル13により引き降ろす動作を示すモデル図である。
この状態でさらに給電ケーブル13を図示矢印B方向に巻取ると、無人飛行体20は支障なく陸上無人機1のデッキ6に降着し、収容できる。
しかし、給電ケーブル13の繰出しが制限されているので、無人飛行体20は徐々に陸上無人機1の真上方向に移動し、給電ケーブル13とブラケット14aとの結合点P1が図示P2位置まで移動する。
この場合は、ロータ23a、23b、23c、23dを駆動する電磁モータ22a、22b、22c、22dを特別に制御することなく、給電ケーブル13の巻取り制御のみで無人飛行体20を支障なく陸上無人機1のデッキ6に降着し、収容することが可能である。
この結果、無人飛行体20は鉛直方向に対し角度θの傾きを生じ、ロータ23a、23b、23c、23dにより生じる力は図示矢印E’方向に変移する。
このとき、無人飛行体20の浮上に係る鉛直方向への分力Eyは、
E’cosθ
となり、傾き角度θに比して減少する。
従ってこの場合には、鉛直方向への分力Eyが無人飛行体20の質量Wを上回るように、ロータ23a、23b、23c、23dによる発生する力E’を制御する必要がある。
また、無人飛行体20への給電は、陸上無人機1に搭載したバッテリ8から、給電ケーブル13を介して行うので、無人飛行体20にバッテリを搭載する必要がなくなり、ペイロードの増大が可能となる。
即ち、無人飛行体20に搭載可能な各種センサやカメラ等の選択の自由度が高まる利点が生まれる。
さらに、陸上無人機1は通常、無人飛行体20に比してペイロードが大きいので、陸上無人機1に搭載するバッテリ8は大型化することが可能となる。
このため、従来技術に見られる無人飛行体にバッテリを搭載する構成に比較し、陸上無人機1に搭載したバッテリ8から無人飛行体20に給電する本構成では、無人飛行体20の稼働時間の拡大が可能となる。
なお、この場合には、無人飛行体の重心がロータ23a、23b、23c、23dより下方となるように考慮して、飛行の安定性を確保することが望ましい。
この場合には、オペレータが操作するコントローラ30は、陸上無人機1及び/又は無人飛行体20が取得した映像をはじめとする各種データの表示、保存に使用されるが、機能を限定するものではない。
この場合においても、水上無人機のバッテリと無人飛行体とを給電ケーブルで接続する。
また、無人飛行体の離間・浮上及び無人飛行体の降着・収容の際の水上無人機の動作は、上述した陸上無人機の動作と同じである。
***構成の説明***
次に、実施の形態2による無人機システムの構成について説明する。
図11は、実施の形態2による無人機システムのブロック図である。
図において、コントローラ30は、オペレータ40による操作入力を受け、陸上無人機1及び無人飛行体20を遠隔操作する。
コントローラ30と陸上無人機1とは無線あるいは有線により接続され、コントローラ30は、陸上無人機1の動作制御指令を陸上無人機1に送信する。
また、コントローラ30は、陸上無人機1に搭載したカメラ4により撮像した映像や、陸上無人機1に搭載した図示しないセンサ類から得たデータを、陸上無人機1から受信し、遠隔操作を行うオペレータ40に提示する。
また、コントローラ30は、無人飛行体20に搭載したパンチルトカメラ25により撮像した映像や、無人飛行体20に搭載した図示しないセンサ類から得たデータを無人飛行体20から受信し、遠隔操作を行うオペレータ40に提示する。
なお、これ以外の構成に関しては、上記実施の形態1と同様のため省略する。
次に、以上のように構成された実施の形態2による無人機システムの動作について説明する。
陸上無人機1を操作する場合には、オペレータ40により、陸上無人機1の走行指示がコントローラ30に入力されると、陸上無人機1はコントローラ30から送信される制御指令により制御され、図示しない駆動源により駆動される車輪2a、2b、2c、2dを回動して走行動作を行う。
このとき、陸上無人機1に搭載した撮像手段3のカメラ4により走行方向の映像を撮像し、撮影した画像データをコントローラ30に送信して表示するので、オペレータ40はコントローラ30に表示される映像を見ながら遠隔操作を行うことができる。
同様に、陸上無人機1に搭載した図示しないセンサ類から得たデータもコントローラ30に送信されるので、オペレータ40はそれらのデータを基に陸上無人機1の遠隔操作を行うことができ、確実な操作を行うことが可能となる。
このとき、無人飛行体20に搭載したパンチルトカメラ25により飛行方向または周囲の映像を撮像し、撮影した画像データをコントローラ30に送信して表示するので、オペレータ40はコントローラ30に表示される映像を見ながら遠隔操作を行うことができる。
更に、陸上無人機1に搭載した撮像手段3のカメラ4により無人飛行体20の映像を撮像し、撮影した画像データをコントローラ30に送信して表示した場合には、オペレータ40はさらに容易な遠隔操作を行うことが可能となる。
同様に、無人飛行体20に搭載した図示しないセンサ類から得たデータもコントローラ30に送信されるので、オペレータ40はそれらのデータを基に無人飛行体20の遠隔操作を行うことができ、確実な操作を行うことが可能となる。
実施の形態2による無人機システムは、実施の形態1に示した効果と同様の効果を奏することはもちろん、コントローラ30と陸上無人機1との通信と、コントローラ30と無人飛行体20との通信の経路を、それぞれ別に構成したので、陸上無人機1と無人飛行体20を同時に操作する際に、制御指令やデータを送受信する通信経路の通信量過多による伝送遅れ等を防止することが可能となる。
Claims (10)
- 給電ケーブルが接続されているバッテリを備える地上無人機と、
前記給電ケーブルを介して前記バッテリと接続され、前記給電ケーブルを介して前記バッテリからの電力供給を受ける無人飛行体とを有する無人機システム。 - 前記無人飛行体は、
前記給電ケーブルが接続された状態のままで飛行する請求項1に記載の無人機システム。 - 前記地上無人機は、更に、
前記無人飛行体が浮上する際に、前記給電ケーブルを送り出す巻回装置を備える請求項1に記載の無人機システム。 - 前記巻回装置は、
前記給電ケーブルの送り出しを制限して、前記無人飛行体の浮上高さを制御する請求項3に記載の無人機システム。 - 前記地上無人機は、更に、
前記無人飛行体を積載するための積載台を備え、
前記巻回装置は、
前記給電ケーブルを巻き取って、空中の前記無人飛行体を前記積載台に引き降ろす請求項3に記載の無人機システム。 - 前記巻回装置は、
前記無人飛行体が前記積載台に積載される際に前記給電ケーブルの巻き取り量を調整して前記給電ケーブルに張力を発生させるとともに、前記無人飛行体が前記積載台に積載されている間は、前記給電ケーブルに張力が発生している状態を維持する請求項5に記載の無人機システム。 - 前記地上無人機は、
前記地上無人機を制御するコントローラと通信を行うとともに、前記無人飛行体と通信を行い、
前記無人飛行体は、
前記地上無人機と通信を行う請求項1に記載の無人機システム。 - 前記地上無人機及び前記無人飛行体は、それぞれ
前記地上無人機及び前記無人飛行体を制御するコントローラと通信を行う請求項1に記載の無人機システム。 - バッテリを備え、前記バッテリが給電ケーブルを介して無人飛行体と接続している地上無人機。
- 地上無人機が備えるバッテリと給電ケーブルを介して接続され、前記給電ケーブルを介して前記バッテリからの電力供給を受ける無人飛行体。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015080405A JP2016199144A (ja) | 2015-04-09 | 2015-04-09 | 無人機システム及び地上無人機及び無人飛行体 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015080405A JP2016199144A (ja) | 2015-04-09 | 2015-04-09 | 無人機システム及び地上無人機及び無人飛行体 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2016199144A true JP2016199144A (ja) | 2016-12-01 |
Family
ID=57423151
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015080405A Pending JP2016199144A (ja) | 2015-04-09 | 2015-04-09 | 無人機システム及び地上無人機及び無人飛行体 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2016199144A (ja) |
Cited By (33)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017217942A (ja) * | 2016-06-03 | 2017-12-14 | 株式会社衛星ネットワーク | 無人機システム、無人機、係留装置 |
| CN107640079A (zh) * | 2017-05-19 | 2018-01-30 | 成都天麒科技有限公司 | 一种无人机续航保障方法 |
| JP2018107648A (ja) * | 2016-12-27 | 2018-07-05 | キヤノンマーケティングジャパン株式会社 | 情報処理装置、及びその制御方法、プログラム |
| KR20180082236A (ko) * | 2017-01-10 | 2018-07-18 | 드로젠(주) | 드론용 비행 테스트 장치 |
| WO2018152909A1 (zh) * | 2017-02-24 | 2018-08-30 | 深圳市大疆创新科技有限公司 | 云台装置及无人机 |
| CN109291745A (zh) * | 2018-11-28 | 2019-02-01 | 丁风海 | 一种战场弹药补给机器人 |
| CN109398733A (zh) * | 2017-08-16 | 2019-03-01 | 福特全球技术公司 | 用于使无人飞行器着陆的方法和系统 |
| KR20190023700A (ko) * | 2017-08-30 | 2019-03-08 | 엘지이노텍 주식회사 | 구동 장치 및 비행 장치 |
| KR20190023698A (ko) * | 2017-08-30 | 2019-03-08 | 엘지이노텍 주식회사 | 구동 장치 및 비행 장치 |
| CN109502039A (zh) * | 2018-11-30 | 2019-03-22 | 山东大学 | 一种车载无人机停机箱设备、自动更换电池方法和系统 |
| WO2019067110A1 (en) * | 2017-09-26 | 2019-04-04 | Intel Corporation | HYBRID VEHICLES WITHOUT PILOTS AND ASSOCIATED METHODS |
| JP2019064545A (ja) * | 2017-10-05 | 2019-04-25 | 本田技研工業株式会社 | 飛翔体の格納システム |
| CN109747859A (zh) * | 2017-11-02 | 2019-05-14 | 天津职业技术师范大学 | 一种搭载动力和数据线的无人机起落平台系统 |
| WO2019095275A1 (zh) * | 2017-11-17 | 2019-05-23 | 深圳市科比特航空科技有限公司 | 连接器结构及挂载无人机 |
| CN110103800A (zh) * | 2019-04-30 | 2019-08-09 | 江苏方天电力技术有限公司 | 适于输电线路的无人机智能巡检作业车和巡检方法 |
| JP2019170014A (ja) * | 2018-03-22 | 2019-10-03 | 株式会社Soken | 電源装置およびこれを用いた飛行装置 |
| CN110356581A (zh) * | 2019-07-30 | 2019-10-22 | 深圳市世纪南方科技有限公司 | 飞行器系留天空端装置 |
| WO2019215839A1 (ja) * | 2018-05-09 | 2019-11-14 | 株式会社自律制御システム研究所 | 移動体、及びこれを用いる方法 |
| JP2020011593A (ja) * | 2018-07-18 | 2020-01-23 | 株式会社フジタ | 作業機械を監視する移動式飛行体装置 |
| JP2020138639A (ja) * | 2019-02-28 | 2020-09-03 | 株式会社旭テクノロジー | 無人飛行体を用いた構造物検査装置 |
| JP2020138640A (ja) * | 2019-02-28 | 2020-09-03 | 株式会社旭テクノロジー | 無人飛行体を用いた構造物検査装置 |
| JP2020164161A (ja) * | 2017-08-31 | 2020-10-08 | 浙江吉利控股集団有限公司Zhejiang Geely Holding Group Co.,Ltd. | 飛行車システムおよび飛行車共有方法 |
| CN112606753A (zh) * | 2020-11-17 | 2021-04-06 | 陕西北斗金箭航空科技有限公司 | 一种车载高层建筑救援飞行机器人 |
| JP2021054413A (ja) * | 2016-08-16 | 2021-04-08 | 本郷飛行機株式会社 | 情報処理システム |
| CN113306478A (zh) * | 2020-02-25 | 2021-08-27 | 北京理工大学 | 飞行器系留跟随保护平台及其控制方法 |
| JP2022020282A (ja) * | 2020-07-20 | 2022-02-01 | ヤマハ発動機株式会社 | 架空線保守作業システム |
| JP7046405B1 (ja) | 2021-10-13 | 2022-04-04 | 株式会社空撮技研 | 無人飛行体の線状体繰出装置 |
| CN114572094A (zh) * | 2022-03-29 | 2022-06-03 | 吉林大学 | 一种适用于越野车的车载无人机平台 |
| JP2022113698A (ja) * | 2018-05-15 | 2022-08-04 | 東邦ガスネットワーク株式会社 | 検査装置 |
| CN115123058A (zh) * | 2022-07-02 | 2022-09-30 | 巢湖市空鹫无人机科技有限责任公司 | 一种车载无人机收放装置 |
| US11755035B2 (en) | 2020-08-05 | 2023-09-12 | Yamaha Hatsudoki Kabushiki Kaisha | Unmanned aerial vehicle control system and unmanned aerial vehicle control method |
| KR20230174574A (ko) * | 2022-06-21 | 2023-12-28 | 한국항공우주연구원 | 드론의 촬영용 도르래 시스템 및 그 제어 방법 |
| JP2025009623A (ja) * | 2023-07-05 | 2025-01-20 | 直之 村上 | ドローンを自動離着陸する方法 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11285109A (ja) * | 1998-03-30 | 1999-10-15 | Sharp Corp | 無人搬送車及びその充電制御方法 |
| US20120303179A1 (en) * | 2011-05-26 | 2012-11-29 | Hagen Schempf | Robot surveillance system and method |
| US20130233964A1 (en) * | 2012-03-07 | 2013-09-12 | Aurora Flight Sciences Corporation | Tethered aerial system for data gathering |
| JP2014104797A (ja) * | 2012-11-26 | 2014-06-09 | Hitachi-Ge Nuclear Energy Ltd | 建屋内調査システム |
| JP2016049864A (ja) * | 2014-08-29 | 2016-04-11 | 三菱重工業株式会社 | 作業ロボットシステム及び作業ロボットシステムの制御方法 |
-
2015
- 2015-04-09 JP JP2015080405A patent/JP2016199144A/ja active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11285109A (ja) * | 1998-03-30 | 1999-10-15 | Sharp Corp | 無人搬送車及びその充電制御方法 |
| US20120303179A1 (en) * | 2011-05-26 | 2012-11-29 | Hagen Schempf | Robot surveillance system and method |
| US20130233964A1 (en) * | 2012-03-07 | 2013-09-12 | Aurora Flight Sciences Corporation | Tethered aerial system for data gathering |
| JP2014104797A (ja) * | 2012-11-26 | 2014-06-09 | Hitachi-Ge Nuclear Energy Ltd | 建屋内調査システム |
| JP2016049864A (ja) * | 2014-08-29 | 2016-04-11 | 三菱重工業株式会社 | 作業ロボットシステム及び作業ロボットシステムの制御方法 |
Cited By (50)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017217942A (ja) * | 2016-06-03 | 2017-12-14 | 株式会社衛星ネットワーク | 無人機システム、無人機、係留装置 |
| JP2021054413A (ja) * | 2016-08-16 | 2021-04-08 | 本郷飛行機株式会社 | 情報処理システム |
| JP2018107648A (ja) * | 2016-12-27 | 2018-07-05 | キヤノンマーケティングジャパン株式会社 | 情報処理装置、及びその制御方法、プログラム |
| KR20180082236A (ko) * | 2017-01-10 | 2018-07-18 | 드로젠(주) | 드론용 비행 테스트 장치 |
| KR101880942B1 (ko) * | 2017-01-10 | 2018-07-23 | 드로젠(주) | 드론용 비행 테스트 장치 |
| CN109641667A (zh) * | 2017-02-24 | 2019-04-16 | 深圳市大疆创新科技有限公司 | 云台装置及无人机 |
| WO2018152909A1 (zh) * | 2017-02-24 | 2018-08-30 | 深圳市大疆创新科技有限公司 | 云台装置及无人机 |
| CN107640079A (zh) * | 2017-05-19 | 2018-01-30 | 成都天麒科技有限公司 | 一种无人机续航保障方法 |
| CN109398733A (zh) * | 2017-08-16 | 2019-03-01 | 福特全球技术公司 | 用于使无人飞行器着陆的方法和系统 |
| KR102422322B1 (ko) * | 2017-08-30 | 2022-07-18 | 엘지이노텍 주식회사 | 구동 장치 및 비행 장치 |
| KR20190023698A (ko) * | 2017-08-30 | 2019-03-08 | 엘지이노텍 주식회사 | 구동 장치 및 비행 장치 |
| KR102411121B1 (ko) * | 2017-08-30 | 2022-06-21 | 엘지이노텍 주식회사 | 구동 장치 및 비행 장치 |
| KR20190023700A (ko) * | 2017-08-30 | 2019-03-08 | 엘지이노텍 주식회사 | 구동 장치 및 비행 장치 |
| US11661127B2 (en) | 2017-08-31 | 2023-05-30 | Zhejiang Geely Holding Group Co., Ltd. | Modular ground vehicle and flight vehicle sharing system |
| JP2020164161A (ja) * | 2017-08-31 | 2020-10-08 | 浙江吉利控股集団有限公司Zhejiang Geely Holding Group Co.,Ltd. | 飛行車システムおよび飛行車共有方法 |
| US10647424B2 (en) | 2017-09-26 | 2020-05-12 | Intel Corporation | Hybrid unmanned vehicles and related methods |
| WO2019067110A1 (en) * | 2017-09-26 | 2019-04-04 | Intel Corporation | HYBRID VEHICLES WITHOUT PILOTS AND ASSOCIATED METHODS |
| JP2019064545A (ja) * | 2017-10-05 | 2019-04-25 | 本田技研工業株式会社 | 飛翔体の格納システム |
| CN109747859A (zh) * | 2017-11-02 | 2019-05-14 | 天津职业技术师范大学 | 一种搭载动力和数据线的无人机起落平台系统 |
| WO2019095275A1 (zh) * | 2017-11-17 | 2019-05-23 | 深圳市科比特航空科技有限公司 | 连接器结构及挂载无人机 |
| JP2019170014A (ja) * | 2018-03-22 | 2019-10-03 | 株式会社Soken | 電源装置およびこれを用いた飛行装置 |
| CN112118988A (zh) * | 2018-05-09 | 2020-12-22 | 自动化控制系统研究所株式会社 | 移动体及使用其的方法 |
| WO2019215839A1 (ja) * | 2018-05-09 | 2019-11-14 | 株式会社自律制御システム研究所 | 移動体、及びこれを用いる方法 |
| CN112118988B (zh) * | 2018-05-09 | 2024-01-05 | 自动化控制系统研究所株式会社 | 移动体及使用其的方法 |
| US12363415B2 (en) | 2018-05-09 | 2025-07-15 | Acsl Ltd. | Moving object and method for using same |
| JP7250198B2 (ja) | 2018-05-15 | 2023-03-31 | 東邦ガスネットワーク株式会社 | 検査装置 |
| JP2022113698A (ja) * | 2018-05-15 | 2022-08-04 | 東邦ガスネットワーク株式会社 | 検査装置 |
| JP2020011593A (ja) * | 2018-07-18 | 2020-01-23 | 株式会社フジタ | 作業機械を監視する移動式飛行体装置 |
| JP7176874B2 (ja) | 2018-07-18 | 2022-11-22 | 株式会社フジタ | 作業機械を監視する移動式飛行体装置 |
| CN109291745A (zh) * | 2018-11-28 | 2019-02-01 | 丁风海 | 一种战场弹药补给机器人 |
| CN109291745B (zh) * | 2018-11-28 | 2021-12-28 | 精兵特种装备(福建)有限公司 | 一种战场弹药补给机器人 |
| CN109502039A (zh) * | 2018-11-30 | 2019-03-22 | 山东大学 | 一种车载无人机停机箱设备、自动更换电池方法和系统 |
| JP2020138640A (ja) * | 2019-02-28 | 2020-09-03 | 株式会社旭テクノロジー | 無人飛行体を用いた構造物検査装置 |
| JP2020138639A (ja) * | 2019-02-28 | 2020-09-03 | 株式会社旭テクノロジー | 無人飛行体を用いた構造物検査装置 |
| CN110103800A (zh) * | 2019-04-30 | 2019-08-09 | 江苏方天电力技术有限公司 | 适于输电线路的无人机智能巡检作业车和巡检方法 |
| CN110356581B (zh) * | 2019-07-30 | 2021-10-01 | 深圳市世纪南方科技有限公司 | 飞行器系留天空端装置 |
| CN110356581A (zh) * | 2019-07-30 | 2019-10-22 | 深圳市世纪南方科技有限公司 | 飞行器系留天空端装置 |
| CN113306478A (zh) * | 2020-02-25 | 2021-08-27 | 北京理工大学 | 飞行器系留跟随保护平台及其控制方法 |
| JP2022020282A (ja) * | 2020-07-20 | 2022-02-01 | ヤマハ発動機株式会社 | 架空線保守作業システム |
| JP7119032B2 (ja) | 2020-07-20 | 2022-08-16 | ヤマハ発動機株式会社 | 架空線保守作業システム |
| US11755035B2 (en) | 2020-08-05 | 2023-09-12 | Yamaha Hatsudoki Kabushiki Kaisha | Unmanned aerial vehicle control system and unmanned aerial vehicle control method |
| CN112606753A (zh) * | 2020-11-17 | 2021-04-06 | 陕西北斗金箭航空科技有限公司 | 一种车载高层建筑救援飞行机器人 |
| JP7046405B1 (ja) | 2021-10-13 | 2022-04-04 | 株式会社空撮技研 | 無人飛行体の線状体繰出装置 |
| JP2023058162A (ja) * | 2021-10-13 | 2023-04-25 | 株式会社空撮技研 | 無人飛行体の線状体繰出装置 |
| CN114572094A (zh) * | 2022-03-29 | 2022-06-03 | 吉林大学 | 一种适用于越野车的车载无人机平台 |
| KR20230174574A (ko) * | 2022-06-21 | 2023-12-28 | 한국항공우주연구원 | 드론의 촬영용 도르래 시스템 및 그 제어 방법 |
| KR102734624B1 (ko) * | 2022-06-21 | 2024-11-27 | 한국항공우주연구원 | 드론의 촬영용 도르래 시스템 및 그 제어 방법 |
| CN115123058A (zh) * | 2022-07-02 | 2022-09-30 | 巢湖市空鹫无人机科技有限责任公司 | 一种车载无人机收放装置 |
| JP2025009623A (ja) * | 2023-07-05 | 2025-01-20 | 直之 村上 | ドローンを自動離着陸する方法 |
| JP7702219B2 (ja) | 2023-07-05 | 2025-07-03 | 直之 村上 | ドローンを自動離着陸する方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2016199144A (ja) | 無人機システム及び地上無人機及び無人飛行体 | |
| AU2022287620B2 (en) | System for mid-air payload retrieval by a UAV | |
| US11939084B2 (en) | Landing pad with charging and loading functionality for unmanned aerial vehicle | |
| US10974831B2 (en) | Active position control of tethered hook | |
| EP3728029B1 (en) | System and methods for automatic payload pickup by uav | |
| CN112638770B (zh) | 安全的无人航空器 | |
| WO2019198768A1 (ja) | 無人飛行体 | |
| CN106444795A (zh) | 可移动物体的起飞辅助的方法以及系统 | |
| AU2018393009A1 (en) | Methods and systems for using an unmanned aerial vehicle (UAV) dedicated to deployment of operational infrastructure | |
| US20260062125A1 (en) | Package Loading Mechanism | |
| US12515794B2 (en) | UAV having a rotatable cargo bay | |
| US12148206B2 (en) | Method for controlling an unmanned aerial vehicle to avoid obstacles | |
| US20250340296A1 (en) | Conveyor System for Payload Retrieval System and Method of Use |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20171019 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180619 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180621 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190108 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20190702 |