下記の実施形態1、2において説明する各図は、模式的な図であり、各構成要素の大きさや厚さそれぞれの比が、必ずしも実際の寸法比を反映しているとは限らない。
(実施形態1)
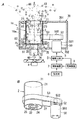
以下では、本実施形態の分離装置1aについて、図1A、1B、2及び3に基づいて説明する。
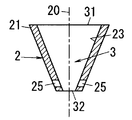
分離装置1aは、筒体2と、筒体2の内部空間により構成される流路3に気体を流す送風装置4と、筒体2の軸方向に沿った中心線20を筒体2の回転中心軸として筒体2を回転させる駆動装置5と、を備える。また、分離装置1aは、筒体2の回転数を設定する設定部6と、駆動装置5が設定部6により設定された回転数で筒体2を回転させるように駆動装置5を制御する制御装置7と、を備える。流路3は、気体の流入口31と流出口32とがあり、筒体2の軸方向に直交する流路断面が円形状であり、流入口31の口径が流入口31以外の口径以上である。送風装置4は、流入口31よりも下流側にある。分離装置1aでは、筒体2における流出口32の周部24に、気体中に含まれていた固体を排出する排出孔25が形成されている。以上の構成により、分離装置1aは、圧力損失の低減を図りながらも分粒特性の向上を図れ、かつ、分粒特性を容易に変えることが可能となる。排出孔25から排出される固体は、分離装置1aの分粒径以上の固体である。分離装置1aでは、筒体2の回転数を変更することにより、分粒径を変えることができる。
気体としては、例えば、空気、排気ガス等が挙げられる。流路3を通る物質としては、気体を構成している気体分子、気体中に含まれている固体等がある。気体分子としては、例えば、窒素分子、酸素分子等が挙げられる。固体としては、例えば、微粒子、塵埃等が挙げられる。微粒子としては、例えば、粒子状物質等を挙げることができる。粒子状物質としては、微粒子として直接大気中に放出される一次生成粒子、気体として大気中に放出されたものが大気中で微粒子として生成される二次生成粒子等がある。一次生成粒子としては、例えば、土壌粒子(黄砂等)、粉塵、植物性粒子(花粉等)、動物性粒子(カビの胞子等)、煤等が挙げられる。粒子状物質は、大きさの分類として、例えば、PM0.5、PM2.5、PM10、SPM等を挙げることができる。
図1A及び2では、分粒径以上の固体の一例として、微粒子61を模式的に記載してある。また、図1Aでは、分粒径未満の固体の一例として、超微粒子60を模式的に記載してある。超微粒子60は、微粒子61よりも粒径が小さい粒子である。
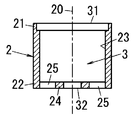
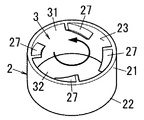
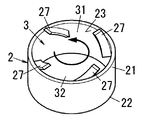
筒体2は、円筒状に形成されている。筒体2は、筒体2の中心線20に沿った方向において筒体2の第1端21側に流入口31があり、筒体2の第2端22側に流出口32がある。筒体2は、外径が一定であり、第2端22の内径が他の部位の内径よりも小さくなっている。言い換えれば、筒体2は、第2端22以外の内径が一定である。分離装置1aでは、筒体2における流出口32の周部24に、排出孔25が形成されている。排出孔25は、流出口32の周部24において、筒体2の中心線20から遠い外側に形成されている。筒体2では、一例として、2つの排出孔25が形成されている。2つの排出孔25の各々は、筒体2の内周面23に沿った円弧状に形成されている。
筒体2は、気体と、気体に含まれている固体と、を筒体2の厚さ方向に通さないように構成されている。筒体2の材料としては、例えば、金属、合成樹脂等を採用することができる。筒体2は、導電性を有するのが好ましい。これにより、分離装置1aでは、筒体2の帯電を抑制することが可能となる。
流路3の断面形状は、円形状である。流入口31の流路断面積(開口面積)は、流出口32の流路断面積よりも大きい。流路3は、筒体2の第2端22以外において流路断面積が一定である。「流路断面積」は、筒体2の中心線20に直交する任意の断面における筒体2の開口面積である。
流路3は、筒体2の中心線20に沿った方向において筒体2の第1端21側が上流側であり、かつ、筒体2の第2端22側が下流側である。本明細書における「上流側」は、気体の流れる方向でみたときの上流側(一次側)を意味する。また、本明細書における「下流側」は、気体の流れる方向でみたときの下流側(二次側)を意味する。
本実施形態における送風装置4は、ファンにより構成されている。ファンは、電動ファンである。これにより、分離装置1aでは、送風装置4を動作させることにより、流路3に気体を流すことが可能となる。電動ファンとしては、例えば、軸流ファンを採用することができる。送風装置4は、流路3の流入口31の下流側において、流路3の流出口32の下流側に配置されている。要するに、送風装置4は、気体を吸引することで流路3に気体を流す装置である。図1A及び2では、送風装置4を動作させたときの気体の流れを白抜きの矢印で模式的に示してある。
駆動装置5は、モータ50と、駆動回路51と、プーリ52と、回転ベルト53と、を備えている。モータ50は、モータ本体(胴体)501から円柱状の回転軸502が突出している。駆動回路51は、モータ50を駆動する。プーリ52は、円板状に形成されている。プーリ52は、モータ50の回転軸502に連結されている。回転ベルト53は、プーリ52の外周面と筒体2の外周面とに架け渡されている。これにより、駆動装置5は、筒体2を回転させることができる。筒体2の回転方向は、モータ50の回転軸502の回転方向と同じである。筒体2の回転角速度は、モータ50の回転軸502の回転角速度と同じである。筒体2の回転数は、モータ50の回転軸502の回転数と同じである。
分離装置1aは、駆動装置5及び制御装置7へ電力を供給する電源装置8を備えているのが好ましい。電源装置8は、例えば、外部の交流電源から供給される交流電圧から駆動装置5及び制御装置7に適した電圧を生成して出力するように構成されているのが好ましい。
分離装置1aは、筒体2を収納するケース70を備えている。ケース70は、直方体状に形成されている。ケース70には、流路3の流入口31を露出させる第1開口部71と、流路3の流出口32を露出させる第2開口部72と、が形成されている。第1開口部71は、ケース70において、筒体2の中心線20に直交する平板状の第1壁701に形成されている。第2開口部72は、ケース70において、筒体2の中心線20に直交する平板状の第2壁702に形成されている。第1開口部71の開口形状は、円形状である。第1開口部71の内径は、筒体2の外径よりも大きい。第2開口部72の開口形状は、円形状である。第2開口部72の内径は、流出口32の内径と略同じである。分離装置1aでは、筒体2の第1端21が第1開口部71内に配置され、筒体2の第2端22が第2開口部72よりも第1開口部71に近い側に配置されている。
ケース70には、排出孔25よりも筒体2の中心線20から離れた位置に、排出孔25に連通する貫通孔75が形成されている。貫通孔75は、排出孔25から排出される固体を通すことができる大きさに形成されている。また、ケース70は、第2開口部72の周部から第1開口部71側へ突出する第1流管73と、第2開口部72の周部から反対側へ突出する第2流管74と、を一体に備えている。第1流管73及び第2流管74は、円筒状に形成されている。第1流管73及び第2流管74それぞれの内径は、第2開口部72の内径と同じであるのが好ましい。
ケース70は、筒体2だけでなく、モータ50の一部及び回転ベルト53を収納する大きさに形成されている。ケース70は、モータ50のモータ本体501を固定できるように構成されている。
ケース70には、筒体2の第1端21を回転自在に保持する第1軸受81と、筒体2の第2端22を回転自在に保持する第2軸受82と、が固定されている。これにより、分離装置1aでは、筒体2をより安定して回転させることが可能となる。
図2では、筒体2の回転方向を太線の矢印で模式的に示してある。筒体2の回転方向は、筒体2を軸方向の第1端21側から見て、反時計回りの方向である。筒体2の回転方向は、筒体2を軸方向の第2端22側から見て、時計回りの方向である。
設定部6は、筒体2の回転数を設定できるように構成されている。言い換えれば、設定部6は、モータ50の回転軸502の回転数を設定できるように構成されていることにより、筒体2の回転数を設定できる。これにより、分離装置1aでは、筒体2の回転数を変更することができる。設定部6は、例えば、ポテンショメータ等によって構成することができる。
制御装置7は、設定部6で設定された回転数で駆動装置5が筒体2を回転させるように駆動回路51を制御する。制御装置7は、例えば、コンピュータ(マイクロコンピュータ等)に所定のプログラムを実行させることにより実現することができる。所定のプログラムは、例えば、コンピュータのメモリに記憶されていればよい。制御装置7は、コンピュータに限らず、適宜の機能回路を組み合わせて構成してもよい。
図3は、分離装置1aにおける筒体2の回転数と分粒径との関係を示すグラフである。図3は、筒体2の内径が10mm、筒体2の長さL1(図2参照)が30mmの場合の実験データである。ここで、図3中の「◆」は、筒体2における流量が0.5L/minの場合の50%分粒径の実験データである。また、図3中の「■」は、筒体2における流量(流路3を通る流量)が1.0L/minの場合の50%分粒径の実験データである。図3から、分離装置1aでは、筒体2における流量を一定として筒体2の回転数を変えることにより50%分粒径を変えることができるのが分かる。
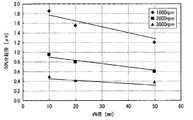
図4は、分離装置1aにおける筒体2の内径と分粒径との関係を示すグラフである。図4は、筒体2の長さL1が30mm、筒体2における流量が0.5L/minの場合の実験データである。ここで、図4中の「◆」は、筒体2の回転数が1000rpmの場合の50%分粒径の実験データである。また、図4中の「■」は、筒体2の回転数が2000rpmの場合の50%分粒径の実験データである。また、図4中の「▲」は、筒体2の回転数が3000rpmの場合の50%分粒径の実験データである。図4から、分離装置1aでは、筒体2の長さL1、筒体2における流量及び筒体2の回転数それぞれを一定として筒体2の内径を変えることにより50%分粒径を変えることができるのが分かる。
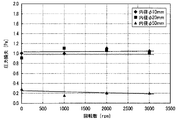
図5は、分離装置1aにおける筒体2の回転数と圧力損失との関係を示すグラフである。図5は、筒体2の長さL1が30mm、筒体2における流量が0.5L/minの場合の実験データである。ここで、図5中の「◆」は、筒体2の内径が10mmの場合の50%分粒径の実験データである。また、図5中の「■」は、筒体2の内径が20mmの場合の50%分粒径の実験データである。また、図5中の「▲」は、筒体2の内径が50mmの場合の50%分粒径の実験データである。図5から、分離装置1aでは、筒体2の長さL1、筒体2における流量及び筒体2の内径それぞれを一定とした場合、筒体2の回転数を変えても圧力損失がほとんど変化しないことが変わる。言い換えれば、分離装置1aでは、回転数を大きくしても圧力損失が増えない傾向にあることが分かる。
分離装置1aでは、流路3に入った気体に含まれていた固体は、流路3において螺旋状に回転するときに筒体2の中心線20から筒体2の内周面23に向かう方向の遠心力を受ける。遠心力を受けた固体は、筒体2の内周面23へ向かい、筒体2の内周面23付近を内周面23に沿って螺旋状に回転する。そして、分離装置1aでは、排出孔25付近を回転していた固体が、その固体に作用していた遠心力により、排出孔25を通して排出される。固体に作用する遠心力は、固体の質量と、固体の円運動の半径と、に比例する。円運動の半径は、筒体2の中心線20に直交する方向における中心線20と固体との距離である。固体の質量をm、固体の速度をv、円運動の半径をrとすると、遠心力の大きさはmv2/rである。ここで、角速度をωとすると、v=rωなので、遠心力の大きさは、mω2rである。要するに、固体には、ωの二乗に比例した遠心力が作用する。
分離装置1aでは、分粒径の微粒子(規定粒径の微粒子)を分離できるように、設定部6において、筒体2の回転数を設定してある。したがって、分離装置1aでは、分粒径以上の固体を分離することが可能となる。規定粒径の微粒子としては、例えば、空気動力学的粒子径が、1.0μmの粒子を想定している。「空気動力学的粒子径」とは、空気動力学的挙動が、比重1.0の球形粒子と等価になるような粒子の直径を意味する。空気動力学的粒子径は、粒子の沈降速度によって測定される粒径である。分離装置1aで分離されずに気体中に残る固体としては、分離装置1aで分離することを想定している微粒子よりも粒径の小さな微粒子(言い換えれば、質量が小さな微粒子)を挙げることができる。
分離装置1aでは、送風装置4を動作させ、かつ、駆動装置5により筒体2を回転させる。これにより、分離装置1aでは、流路3の流入口31よりも上流側の気体(流路3の外側で流入口31付近にある気体)及び流路3に流入した気体に対して筒体2の中心線20のまわりの回転方向の力を与えることが可能となる。より詳細には、分離装置1aでは、送風装置4を動作させ、かつ、筒体2を第1端21側から見て反時計回り方向に回転させることにより、流路3の流入口31よりも上流側の物質(気体、気体中に含まれている固体)及び流路3を通る物質を螺旋状に回転させることができる。「螺旋状に回転」とは、螺旋状に旋回と同じ意味である。図1A及び2では、物質が螺旋状に回転する方向を点線の矢印で模式的に示してある。分離装置1aでは、物質が流入口31に流入する前に物質の旋回流が発生するので、流入口31に流入する前の物質に遠心力が働き、流路3内でのみ物質に遠心力が働くような構成に比べて、分粒効率を向上させることが可能となる。
分離装置1aでは、流路3を通る気流に含まれている分粒径以上の固体(微粒子61)を排出孔25から外部へ排出でき、分粒径以上の固体が分離された気体を流出口32から下流側へ流すことができる。よって、分離装置1aは、圧力損失の低減を図りながらも分粒特性の向上を図れ、かつ、分粒特性を容易に変えることが可能となる。
図6は、分離装置1aを備えた空気浄化システム300の概略構成図である。
分離装置1aのうち送風装置4を含まない分離装置本体10aは、住戸400の屋外に配置される室外機301のハウジング302内に配置される。一方、送風装置4は、住戸400の天井裏に配置される。
分離装置本体10aは、空気中の微粒子61を室外機301におけるハウジング302の外に排出するように構成されている。微粒子61は、上述の規定粒径以上の微粒子であり、空気動力学的粒子径が、1.0μmの粒子を想定している。
ハウジング302には、空気の流入口303と、微粒子61等の固体を排出する固体排出口304と、清浄化された空気の流出口と、が形成されている。ハウジング302の流入口303には、第1のメッシュが配置されているのが好ましい。ハウジング302の固体排出口304には、第2のメッシュが配置されているのが好ましい。ハウジング302には、固体排出口304が複数形成されている。分離装置本体10aでは、ケース70をハウジング302に固定してある。より詳細には、複数の固体排出口304は、筒体2の外周方向において離れて形成されている。
空気浄化システム300は、室外機301により浄化された空気を住戸400内へ流すための第1ダクト311と、第1ダクト311で給気された空気を更に浄化するためのフィルタ装置317と、を備える。フィルタ装置317は、例えば、エアフィルタとして、HEPAフィルタ(high efficiency particulate air filter)を備える。「HEPAフィルタ」とは、定格流量で粒径が0.3μmの粒子に対して99.97%以上の粒子捕集率をもち、かつ初期圧力損失が245Pa以下の性能をもつエアフィルタである。フィルタ装置317は、100%の粒子捕集効率を必須の条件とはしない。ただし、フィルタ装置317は、気体中に含まれている固体の捕集効率がより高いのが好ましい。
図6では、空気の流れを白抜きの矢印で模式的に示してある。また、図6では、分離装置本体10aによって空気から分離して排出する微粒子61と、フィルタ装置317で捕集する超微粒子60と、を模式的に示してある。超微粒子60は、微粒子61よりも粒径が小さく、かつ、HEPAフィルタで除去できる粒径の微粒子である。
また、空気浄化システム300は、フィルタ装置317と送風装置4との間に配置された第2ダクト312と、送風装置4の下流側に配置された分配器318と、送風装置4と分配器318との間に配置された第3ダクト313と、を備える。分配器318には、住戸400内の複数の区画401(例えば、リビング、寝室等)それぞれへ空気を給気するための複数の第4ダクト314が接続されている。フィルタ装置317、第2ダクト312、送風装置4、第3ダクト313及び分配器318は、住戸400の天井裏に配置される。
空気浄化システム300では、室外機301が分離装置本体10aを備えることにより、PM2.5等の微粒子61がフィルタ装置317へ到達するのを抑制することが可能となる。これにより、空気浄化システム300は、フィルタ装置317の長寿命化を図ることが可能となる。言い換えれば、空気浄化システム300では、フィルタ装置317に捕集される微粒子等の総質量が増加することによる圧力損失の上昇を抑制することが可能となる。これにより、空気浄化システム300では、フィルタ装置317の交換頻度を少なくすることが可能とする。
分離装置1aは、送風装置4、駆動装置5及び制御装置7の運転を開始する運転スイッチの操作部を備えているのが好ましい。
筒体2は、流路3に関して、筒体2の軸方向に直交する流路断面が円形状であり、流入口31の口径が流入口31以外の口径以上となる円筒状の形状であれば、上述の例に限定されない。
例えば、本実施形態の分離装置1aの第1変形例では、筒体2が、図7に示すように、第1端21の内径が他の部位に比べて大きくなっている形状でもよい。また、本実施形態の分離装置1aの第2変形例では、筒体2が、図8に示すように、流入口31から流出口32に向かう方向において内径が漸減するテーパ円筒状でもよい。
また、本実施形態の分離装置1aの第3変形例では、図9に示すように、筒体2の内径が一定で、かつ、筒体2の第1端21において内周面23から径方向へ突出した複数の突起26を備えていてもよい。ただし、突起26の突出寸法は、流入口31の内径の半分よりも十分に小さいのが好ましく、内径の4分の1以下であるのが好ましい。
また、本実施形態の分離装置1aの第4変形例では、図10に示すように、筒体2の内径が一定で、かつ、筒体2の第1端21において内周面23から突出する複数の羽根27を備えている。筒体2の径方向における羽根27の突出寸法は、流入口31の内径の半分よりも十分に小さいのが好ましく、内径の4分の1以下であるのが好ましい。複数の羽根27は、それぞれが、筒体2の内周面23に沿った仮想の螺旋形状の一部により構成されているのが好ましい。第4変形例では、複数の羽根27と駆動装置5(図1A参照)とで、筒体2の内部空間により構成される流路3に気体を流す送風装置を構成してもよい。この場合でも、送風装置は、流入口31よりも下流側にある。図10中の太線の矢印は、筒体2の回転方向を示している。
また、本実施形態の分離装置1aの第5変形例では、図11に示すように、筒体2が、流入口31から流出口32に向かう方向において内径が漸減するテーパ円筒状であり、かつ、筒体2の第1端21において内周面23から突出する複数の羽根27を備えている。筒体2の径方向における羽根27の突出寸法は、流入口31の内径の半分よりも十分に小さいのが好ましく、内径の4分の1以下であるのが好ましい。第5変形例では、複数の羽根27と駆動装置5(図1A参照)とで、筒体2の内部空間により構成される流路3に気体を流す送風装置を構成してもよい。この場合でも、送風装置は、流入口31よりも下流側にある。図11中の太線の矢印は、筒体2の回転方向を示している。
また、本実施形態の分離装置1aの第6変形例では、図12に示すように、筒体2の内径が一定で、かつ、筒体2の第2端22において内周面23から突出する複数の羽根27を備えている。筒体2の径方向における羽根27の突出寸法は、流出口32の内径の半分よりも十分に小さいのが好ましく、内径の4分の1以下であるのが好ましい。第6変形例では、複数の羽根27と駆動装置5(図1A参照)とで、筒体2の内部空間により構成される流路3に気体を流す送風装置を構成してもよい。この場合でも、送風装置は、流入口31よりも下流側にある。図12中の太線の矢印は、筒体2の回転方向を示している。
また、本実施形態の分離装置1aの第7変形例では、図13に示すように、筒体2が、流入口31から流出口32に向かう方向において内径が漸減するテーパ円筒状であり、かつ、筒体2の第2端22において内周面23から突出する複数の羽根27を備えている。筒体2の径方向における羽根27の突出寸法は、流出口32の内径の半分よりも十分に小さいのが好ましく、内径の4分の1以下であるのが好ましい。第7変形例では、複数の羽根27と駆動装置5(図1A参照)とで、筒体2の内部空間により構成される流路3に気体を流す送風装置を構成してもよい。この場合でも、送風装置は、流入口31よりも下流側にある。図13中の太線の矢印は、筒体2の回転方向を示している。
また、本実施形態の分離装置1aの第8変形例では、第4変形例と同様、図14に示すように、筒体2の内径が一定で、かつ、筒体2の第1端21において内周面23から突出する複数の羽根27を備えている。第8変形例では、複数の羽根27と駆動装置5(図1A参照)とで、筒体2の内部空間により構成される流路3に気体を流す送風装置を構成してもよい。この場合でも、送風装置は、流入口31よりも下流側にある。第8変形例では、複数の羽根27それぞれの一端が流入口31よりも上流側にある点が第4変形例と相違するだけである。要するに、送風装置は、流入口31よりも下流側にあればよく、複数の羽根27それぞれの一部が流入口31よりも上流側にあってもよい。図14中の太線の矢印は、筒体2の回転方向を示している。
(実施形態2)
以下では、本実施形態の分離装置1bを備えた計測器600について、図15〜19に基づいて説明する。なお、実施形態1と同様の構成要素については、実施形態1と同一の符号を付して説明を適宜省略する。
分離装置1bの基本構成は、実施形態1の分離装置1aと略同じであり、排出孔25から排出された固体を捕集する捕集部9を備える点が相違する。これにより、分離装置1bでは、筒体2の排出孔25から排出された分粒径の固体(微粒子61)を捕集部9で捕集することが可能となる。捕集部9は、ケース70に対して着脱自在であるのが好ましい。また、分離装置1bの基本構成が実施形態1の分離装置1aと略同じであるから、分離装置1bでは、分離装置1aと同様、圧力損失の低減を図りながらも分粒特性の向上を図れ、かつ、分粒特性を容易に変えることが可能となる。
計測器600は、分粒径未満の計測対象粒子の質量濃度を求め、求めた質量濃度を表示できるように構成されている。本実施形態では、計測対象粒子の一例として、煙草の煙粒子を想定している。
計測器600は、分離装置1bと、粒子検知モジュール601と、フィルタ装置602と、回路モジュール603と、表示装置608と、設定部6と、を備える。
分離装置1bは、分離装置本体10bと、送風装置4と、を備える。分離装置本体10bの基本構成は、実施形態1で説明した分離装置本体10aと略同じであり、排出孔25から排出された固体を捕集する捕集部9を備える点が相違する。分離装置1bは、分離装置本体10bが、粒子検知モジュール601及びフィルタ装置602よりも上流側に配置され、送風装置4が、フィルタ装置602よりも下流側に配置されている。なお、図16中の白抜きの矢印は、気体の流れを模式的に示している。より詳細には、分離装置本体10bに向かう白抜きの矢印、粒子検知モジュール601に向かう白抜きの矢印及びフィルタ装置602に向かう白抜きの矢印は、エアロゾル(煙草の煙粒子)を含む気体の流れを模式的に示している。また、送風装置4に向かう白抜きの矢印及び送風装置4から下流側へ向かう白抜きの矢印は、フィルタ装置602でエアロゾルが取り除かれた後の気体の流れを模式的に示している。
粒子検知モジュール601は、チャンバ610と、発光素子611と、発光素子611から放射される光を制御する第1レンズ612と、受光素子613と、受光素子613の受光面の前方に配置される第2レンズ614と、を備える。
チャンバ610の一部は、発光素子611と第1レンズ612と受光素子613と第2レンズ614とを位置決めする光学基台を兼ねている。チャンバ610は、黒色の合成樹脂により形成されているのが好ましい。
計測器600は、チャンバ610と分離装置本体10bの第2流管74とを連結する配管604を備えている。配管604は、円筒状に形成されている。また、計測器600は、チャンバ610とフィルタ装置602のハウジング621とを連結する配管605及び620を備えている。配管605は、円筒状に形成されている。配管620は、フィルタ装置602に近づくにつれて開口面積が徐々に大きくなるテーパ円筒状に形成されている。
チャンバ610は、分離装置本体10bにおける流路3の流出口32から流出した、計測対象粒子を含む気体が通過できるように構成されている。また、チャンバ610は、外部からの外光が入射するのを抑制するように構成されている。
発光素子611は、LED(Light Emitting Diode)により構成されている。発光素子611による光の照射範囲は、例えば、チャンバ610と第1レンズ612とで規定することができる。発光素子611による光の照射範囲は、発光素子611の光軸と筒体2の中心線20とを含む一面内では、図17に模式的に示すように、2本の点線A1によって囲まれた範囲である。なお、発光素子611は、LEDに限らず、例えば、LD(Laser Diode)でもよい。
受光素子613は、フォトダイオードにより構成されている。受光素子613による光の受光範囲は、例えば、チャンバ610と第2レンズ614とで規定することができる。受光素子613による光の受光範囲は、受光素子613の光軸と筒体2の中心線20とを含む一面内では、図17に模式的に示すように、2本の点線B1によって囲まれた範囲である。
発光素子611と受光素子613とは、発光素子611と受光素子613とが対向しないように配置されている。より詳細には、発光素子611と受光素子613とは、発光素子611の光軸と受光素子613の光軸とがチャンバ610の粒子検知室615で交差するように、光学基台により位置決めされている。発光素子611による光の照射範囲と受光素子613による光の受光範囲とは、粒子検知室615において重複する。
粒子検知モジュール601では、発光素子611から放射された光が粒子検知室615に照射される。粒子検知モジュール601では、粒子検知室615に計測対象粒子が入ると、計測対象粒子による散乱光の一部が受光素子613に入射するので、受光素子613の出力信号が大きくなる。
フィルタ装置602は、HEPAフィルタである。フィルタ装置602は、HEPAフィルタに限らず、例えば、ULPAフィルタ(ultra low penetration air filter)等でもよい。「ULPAフィルタ」とは、定格流量で粒径が0.15μmの粒子に対して99.9995%以上の粒子捕集率をもち、かつ初期圧力損失が245Pa以下の性能をもつエアフィルタである。
送風装置4は、電動ファンである。計測器600は、送風装置4を収納するハウジング607を備えている。計測器600は、フィルタ装置602のハウジング621とハウジング607とを連結する配管622及び606を備えている。配管622は、フィルタ装置602から離れるにつれて開口面積が徐々に大きくなるテーパ円筒状に形成されている。配管606は、円筒状に形成されている。
回路モジュール603は、プリント基板631を備えている。回路モジュール603では、プリント基板631に、電源回路640、アナログ回路641及び制御装置7が形成されている。また、回路モジュール603では、プリント基板631に7個のコネクタ632、634、635、636、637、638及び639が実装されている。コネクタ632は、商用電源との接続用コネクタである。これにより、計測器600は、商用電源を電源として動作することができる。計測器600は、電池を電源として動作するように構成してもよい。コネクタ634には、送風装置4との接続用コネクタである。コネクタ635は、モータ50との接続用コネクタである。コネクタ636は、表示装置608との接続用コネクタである。コネクタ637は、設定部6との接続用コネクタである。コネクタ638は、発光素子611との接続用コネクタである。コネクタ639は、受光素子613との接続用コネクタである。
アナログ回路641は、モータ50を駆動する駆動回路(以下、「第1駆動回路」ともいう。)と、粒子検知モジュール601を駆動する駆動回路(以下、「第2駆動回路」ともいう。)と、送風装置4を駆動する駆動回路(以下、「第3駆動回路」ともいう)と、を備える。第1駆動回路は、制御装置7によって制御される。制御装置7は、駆動装置5が設定部6により設定された回転数で筒体2を回転させるように駆動装置5(における第1駆動回路)を制御する。第2駆動回路は、制御装置7によって制御されて発光素子611及び受光素子613を駆動する。第3駆動回路は、制御装置7によって制御されて筒体2に単位時間当たりに流れる流量が所定流量となるように送風装置4を駆動する。また、アナログ回路641は、粒子検知モジュール601の出力信号を信号処理する信号処理回路を備える。
信号処理回路は、例えば、図17に示すように、受光素子613の出力信号を電流−電圧変換して出力する電流電圧変換回路616と、電流電圧変換回路616の後段に設けられたフィルタ617と、フィルタ617の後段に設けられた増幅回路618と、増幅回路618の後段に設けられたフィルタ619と、を備えている。フィルタ617は、HPF(high pass filter)であり、一例として、カットオフ周波数を5Hzに設定してある。フィルタ619は、LPF(low pass filter)であり、一例として、カットオフ周波数を20Hzに設定してある。フィルタ617とフィルタ619とは、計測対象粒子が粒子検知室615を通過するのに要する時間(以下、「通過時間」ともいう。)基づいて設定するのが好ましい。例えば、通過時間が100msecの場合、受光素子613の出力信号における信号成分の周波数は、10Hz付近にある。信号処理回路では、フィルタ617とフィルタ619とで、5Hz〜20Hzの通過帯域を有するバンドパスフィルタを構成している。
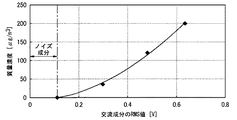
図18は、信号処理回路から出力される電圧信号の波形の一例を示している。図18は、横軸が時間、縦軸が電圧信号の波高値である。図18において、波高値が高くなっている時刻では、煙粒子による散乱光に起因して受光素子613の出力信号が大きくなっていると推考され、波高値が低い時刻では、煙粒子による散乱光がなく受光素子613の出力信号の主成分が交流成分であると推考される。波高値と粒子径とには相関があり、粒子の密度、屈折率及び反射率それぞれが一定であると仮定すれば、粒子径が大きいほど波高値が大きくなる傾向にある。
制御装置7は、時計部と、演算部と、質量濃度推定部と、記憶部と、を備えている。第1演算部は、信号処理回路から出力される電圧信号の波形の所定時間T1における交流成分のRMS値(root mean square value)を演算する。質量濃度推定部は、下記の式(1)の換算式により計測対象粒子の質量濃度を推定する。
式(1)において、xは、演算部での演算により求めた交流成分のRMS値である。また、式(1)において、yは、計測対象粒子の質量濃度である。a1、b1及びc1は、それぞれ係数である。一例では、a1=503.7、b1=14.23、c1=−9.0035である。ここで、a1、b1及びc1の各値は、図19から求めた値である。
図19の横軸は、図18の電圧信号の波形の所定時間T1における交流成分のRMS値である。RMS値は、所定時間T1を3分としたときの値である。また、図19では、所定時間T1において、波高値がVn1とVn2との間にあるノイズ交流成分のRMS値を、ノイズ成分として記載してある。
図19の縦軸は、JIS B9908:2011で規定されている試験方法形式3における試験項目の粒子捕集率(質量法)による、煙粒子の質量濃度の計測値である。
式(1)の換算式は、図19の4つの計測値に対して最小二乗法を適用して2次関数をフィッティングさせたときの式である。
制御装置7は、質量濃度推定部で推定した質量濃度を表示装置608に表示させる。表示装置608は、例えば、液晶表示装置等により構成することができる。
制御装置7は、例えば、コンピュータ(マイクロコンピュータ等)に所定のプログラムを実行させることにより実現することができる。所定のプログラムは、例えば、コンピュータのメモリに記憶されていればよい。制御装置7は、コンピュータに限らず、適宜の機能回路を組み合わせて構成してもよい。
質量濃度は、光学式の粒子検知モジュール601を利用して求める方式に限らず、例えば、濾紙で粒子をためて質量法で測定する方式でもよい。
実施形態1及び2に記載した材料、数値等は、好ましい例を示しているだけであり、それに限定する主旨ではない。更に、本願発明は、その技術的思想の範囲を逸脱しない範囲で、構成及び形状それぞれに適宜変更を加えることが可能である。
例えば、送風装置4は、電動ファンに限らず、電動ポンプ、ブロワ等でもよい。