JP2017006051A - 散歩アシスト方法、散歩アシスト装置、及びプログラム - Google Patents
散歩アシスト方法、散歩アシスト装置、及びプログラム Download PDFInfo
- Publication number
- JP2017006051A JP2017006051A JP2015125207A JP2015125207A JP2017006051A JP 2017006051 A JP2017006051 A JP 2017006051A JP 2015125207 A JP2015125207 A JP 2015125207A JP 2015125207 A JP2015125207 A JP 2015125207A JP 2017006051 A JP2017006051 A JP 2017006051A
- Authority
- JP
- Japan
- Prior art keywords
- walk
- visual field
- automatic unmanned
- guidance target
- information
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images







Landscapes
- Navigation (AREA)
Abstract
【課題】自動無人航空機が進行経路を決定する場合に、自動無人航空機が誘導する対象に応じて、進行経路を決定することは考慮されていない。【解決手段】自動無人航空機とリードで接続される誘導対象の散歩をアシストする散歩アシスト装置であって、誘導対象の散歩経路の情報と誘導対象の視野範囲の情報とに基づいて、誘導対象の散歩中の視野領域を求め、地図情報上において、視野領域に他の誘導対象の散歩経路とが重なる領域があるか否かを判定する予測部と、視野領域と他の誘導対象の散歩経路とが重なる領域を用いて、誘導対象の散歩経路を変更する散歩経路変更部と、変更した散歩経路を用いて、自動無人航空機の移動を制御する信号を飛行機構に出力する移動制御部とを備える。【選択図】図1
Description
本発明は、散歩アシスト方法および散歩アシスト装置に関する。
特許文献1には、複数の独立した無人移動輸送手段を用いて、構造物の検査方法が開示されている。各無人移動輸送手段は、検査対象の構造物に対する輸送手段用の進行経路を規定する動作プログラムによりプログラミングする。無人移動輸送手段は、それらが構造物の周囲を進行する群を協働して形成するように配備される。
しかし、犬を自由に散歩させた場合、他の犬と遭遇した時に暴れる、あるいは迷子になったりして帰ってこられないなどの課題が存在する。
しかし、犬を自由に散歩させた場合、他の犬と遭遇した時に暴れる、あるいは迷子になったりして帰ってこられないなどの課題が存在する。
特許文献1では、自動無人航空機が進行経路を決定する場合に、自動無人航空機が誘導する対象に応じて、進行経路を決定することは考慮されていない。
本発明のある局面に係る自動無人航空機を用いて、誘導対象の散歩をアシストする散歩アシスト方法は、誘導対象の散歩経路の情報と、誘導対象の視野範囲の情報と、他の散歩アシスト装置の誘導対象である他の誘導対象の散歩経路の情報とを取得し、前記誘導対象の散歩経路の情報と前記誘導対象の視野範囲の情報とに基づいて、前記湯動対象の散歩中の視野領域を求め、前記視野領域に前記他の誘導対象の散歩経路とが重なる領域があるか否かを判定し、前記視野領域に前記他の誘導対象の散歩経路が含まれている場合には、前記視野領域と前記他の誘導対象の散歩経路とが重なる領域を用いて、前記誘導対象の散歩経路を変更し、前記変更した散歩経路を用いて、前記自動無人航空機の移動を制御する信号を出力する。
本発明の一態様に係る散歩アシスト方法、散歩アシスト装置、及びプログラムによれば、自動無人航空機が誘導する対象に応じて、進行経路を決定することができる。
(本発明の基礎となる知見)
犬を散歩させる際には、散歩させている犬が他の犬と遭遇した時に暴れる、さらに散歩させている犬が迷子になるなどの課題が存在する。人が犬を散歩させる場合には、状況に応じて、対応を判断できる。自動無人航空機により犬を散歩させる場合には、様々な状況に対応することが難しいため、犬が他の犬に遭遇しないように散歩経路を設定することが有効である。複数の自動無人航空機がそれぞれ犬を散歩させる場合には、相互に情報を送受信することにより、散歩経路を設定し得るという知見を得た。
犬を散歩させる際には、散歩させている犬が他の犬と遭遇した時に暴れる、さらに散歩させている犬が迷子になるなどの課題が存在する。人が犬を散歩させる場合には、状況に応じて、対応を判断できる。自動無人航空機により犬を散歩させる場合には、様々な状況に対応することが難しいため、犬が他の犬に遭遇しないように散歩経路を設定することが有効である。複数の自動無人航空機がそれぞれ犬を散歩させる場合には、相互に情報を送受信することにより、散歩経路を設定し得るという知見を得た。
(実施の形態1)
以下、図面を参照しながら、実施の形態1を説明する。
以下、図面を参照しながら、実施の形態1を説明する。
本開示の一態様に係る散歩アシスト装置は、人間が乗らず、コンピュータによる自動操縦で飛行する航空機(以下、自動無人航空機と表記する)を備え、自動無人航空機とリードを介して接続された散歩対象の犬を誘導する。
散歩アシスト装置は、誘導する犬と他の犬を遭遇させないように、散歩経路を動的に変更して、犬を散歩させる。
散歩アシスト装置1は、自動無人航空機100と、リード制御部とを少なくとも備える。
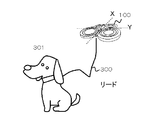
図3に、本実施の形態に係る散歩アシスト装置1の外観図を示す。図3に示す散歩アシスト装置1は、自動無人航空機100と、リード300と、リード制御部とを備える。散歩アシスト装置1は、リード300に誘導する犬301がつながれた状態で移動することにより、犬301を誘導して、散歩させることができる。なお、散歩アシスト装置1は、予めリード制御部と接続されたリード300を備えていても良いし、利用する際に、リード制御部にリード300が接続されても良い。
リード300により、誘導する犬301と自動無人航空機100とが接続される。具体的には、リード制御部は、リード300を介して、誘導する犬301と接続される。リード制御部は、例えば、モータを有し、リード300を巻き取ることにより、自動無人航空機100と誘導する犬301との距離を変更することができる。
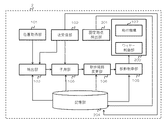
図1に、自動無人航空機100の機能的ブロック図を示す。図1に示す自動無人航空機100は、位置取得部101と、送受信部102と、検出部103と、記憶部104と、予測部105と、散歩経路変更部106と、飛行機構107と、移動制御部108とを備える。
(位置取得部101)
位置取得部101は、自動無人航空機100の現在位置を取得する。自動無人航空機100の現在位置は、自動無人航空機100が誘導する犬の位置情報に相当する。位置取得部101の具体例は、GPSである。以下、自動無人航空機100が誘導する犬を、誘導される犬とも表記する。
位置取得部101は、自動無人航空機100の現在位置を取得する。自動無人航空機100の現在位置は、自動無人航空機100が誘導する犬の位置情報に相当する。位置取得部101の具体例は、GPSである。以下、自動無人航空機100が誘導する犬を、誘導される犬とも表記する。
(送受信部102)
送受信部102は、他犬の散歩させる他の自動無人航空機から、他の犬の位置情報、他の犬の散歩の経路情報を少なくとも受信する。送受信部102は、受信した情報を記憶部104に記憶しても良い。送受信部102は、他の散歩アシスト装置に、誘導させる犬の位置の情報、誘導させる犬の散歩の経路の情報を送信しても良い。
送受信部102は、他犬の散歩させる他の自動無人航空機から、他の犬の位置情報、他の犬の散歩の経路情報を少なくとも受信する。送受信部102は、受信した情報を記憶部104に記憶しても良い。送受信部102は、他の散歩アシスト装置に、誘導させる犬の位置の情報、誘導させる犬の散歩の経路の情報を送信しても良い。
送受信部102の具体的なハードウェアは、信号を受信するアンテナである。
(検出部103)
検出部103は、誘導される犬の位置情報と、他の犬の位置情報とに基づいて、誘導される犬の所定距離以内に、他の犬が位置するか否かを検出する。例えば、所定の距離の情報は、記憶部104に記憶されても良い。
検出部103は、誘導される犬の位置情報と、他の犬の位置情報とに基づいて、誘導される犬の所定距離以内に、他の犬が位置するか否かを検出する。例えば、所定の距離の情報は、記憶部104に記憶されても良い。
(記憶部104)
記憶部104は、地図情報と、誘導される犬の散歩経路の情報と、誘導される犬の視野範囲の情報とを少なくとも記憶する。誘導される犬の散歩経路の情報の例は、地図上における誘導される犬の家から出発し、帰宅するまでの経路の情報である。誘導される犬の視野範囲の情報の例は、誘導される犬が、眼で見て、対象物を判別できる距離である。
記憶部104は、地図情報と、誘導される犬の散歩経路の情報と、誘導される犬の視野範囲の情報とを少なくとも記憶する。誘導される犬の散歩経路の情報の例は、地図上における誘導される犬の家から出発し、帰宅するまでの経路の情報である。誘導される犬の視野範囲の情報の例は、誘導される犬が、眼で見て、対象物を判別できる距離である。
(予測部105)
予測部105は、記憶部104から、地図情報と、散歩経路情報と、視野範囲の情報とを取得する。また、予測部105は、送受信部102を介して、他の自動無人航空機から、他の犬の散歩の経路情報を取得する。
予測部105は、記憶部104から、地図情報と、散歩経路情報と、視野範囲の情報とを取得する。また、予測部105は、送受信部102を介して、他の自動無人航空機から、他の犬の散歩の経路情報を取得する。
予測部105は、地図情報と散歩の経路情報と視野範囲の情報とを用いて、散歩経路全体における誘導される犬の視野領域を求める。図4Aに、散歩経路の一部における誘導される犬の視野領域の例を示す。
図4Aにおいて、誘導される犬は、地図上のAからBに向かう散歩経路501を有する。図4Aに示す犬の視野領域502は、散歩経路501における各点を中心として、左右に視野範囲を加えた領域を意味する。つまり、誘導される犬の視野領域は、地図上において、散歩の全経路を中心として、左右に視野範囲を加えた領域である。
予測部105は、求められた散歩経路全体における誘導される犬の視野領域に、他の犬の散歩経路が含まれているか否かを判定する。
図4Bに、誘導される犬及び他の犬の視野領域を示す。予測部105は、他の犬の散歩の経路情報に基づいて、他の犬の視野領域を求める。具体的には、予測部105は、誘導される犬の視野領域と同様に、他の犬の散歩の経路情報と、視野範囲の情報とを用いて、他の犬の視野領域を求める。ここで、他の自動無人航空機から他の犬の視野範囲の情報を取得しても良いし、記憶部104に記憶されている視野範囲の情報を用いても良い。
図4Bに示すように、他の犬は、地図上のCからDに向かう散歩経路502を有する場合、誘導される犬の視野領域と、他の犬の視野領域とが重なる部分がある。この場合には、予測部105は、誘導される犬の視野領域に、他の犬の散歩経路が含まれていると判定する。
(散歩経路変更部106)
散歩経路変更部106は、予測部105により、誘導される犬の視野領域に、他の犬の散歩経路が含まれていると判定された場合に、散歩経路を変更する。
散歩経路変更部106は、予測部105により、誘導される犬の視野領域に、他の犬の散歩経路が含まれていると判定された場合に、散歩経路を変更する。
散歩経路変更部106は、予測部105から誘導される犬の視野領域と、他の犬の視野領域とが重なる部分の位置情報を受け付ける。散歩経路変更部106は、犬の散歩経路の情報に含まれる始点及び終点と、他の犬の視野領域とが重なる部分の位置情報とに基づいて、重なる部分の位置情報を通らず、かつ、始点及び終点の結ぶ経路に、散歩経路を変更する。例えば、図4Cに示すように、地図上のAからBに向かう散歩経路を散歩経路504に変更する。なお、散歩経路変更部106は、変更した散歩経路の情報を記憶部104に記憶しても良い。
(飛行機構107)
飛行機構107により、自動無人航空機100を飛行する。飛行機構107の具体例は、プロペラと、プロペラを駆動するモータである。モータは、プロペラの回転を駆動する移動モータと、プロペラの位置の変更を駆動する位置変更モータとを含む。
飛行機構107により、自動無人航空機100を飛行する。飛行機構107の具体例は、プロペラと、プロペラを駆動するモータである。モータは、プロペラの回転を駆動する移動モータと、プロペラの位置の変更を駆動する位置変更モータとを含む。
例えば、図3に示すX軸又はY軸を起点として、自動無人航空機100の形状を変更することにより、プロペラの位置が変更される。
移動モータにより、自動無人航空機100の飛行、飛行速度が制御される。位置変更モータにより、自動無人航空機100の左右の旋回が制御される。
(移動制御部108)
移動制御部108は、記憶部104に記憶されている散歩経路の情報、又は散歩経路変更部106により変更された散歩経路の情報に基づいて、飛行機構107に、移動方向を指示する。具体的には、移動制御部108は、位置取得部101により現在の位置を取得し、地図情報及び散歩経路の情報に基づいて、移動方向を決定し、飛行機構107に指示信号を出力する。
移動制御部108は、記憶部104に記憶されている散歩経路の情報、又は散歩経路変更部106により変更された散歩経路の情報に基づいて、飛行機構107に、移動方向を指示する。具体的には、移動制御部108は、位置取得部101により現在の位置を取得し、地図情報及び散歩経路の情報に基づいて、移動方向を決定し、飛行機構107に指示信号を出力する。
図1に示す機能ブロック図のうち、検出部103、予測部105、散歩経路変更部106、及び移動制御部108は、半導体装置、半導体集積回路(IC)、又はLSI(large scale integration)を含む一つ又は一つ以上の電子回路によって実行されてもよい。LSI又はICは、一つのチップに集積されてもよいし、複数のチップを組み合わせて構成されてもよい。例えば、記憶素子以外の機能ブロックは、一つのチップに集積されてもよい。
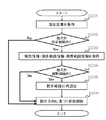
図2に、散歩アシストシステム1の動作のフローチャートを示す。なお、図2に示すフローチャートの処理は、散歩中、連続的に行われる。
(ステップS201)
位置取得部101は、自動無人航空機100の現在位置を取得する。自動無人航空機100の現在位置は、自動無人航空機100が誘導する犬の位置情報に相当する。ここで、自動無人航空機100が誘導する犬を、誘導される犬とも表記する。現在の位置の情報の例は、緯度経度の情報、または地図情報上での位置である。
位置取得部101は、自動無人航空機100の現在位置を取得する。自動無人航空機100の現在位置は、自動無人航空機100が誘導する犬の位置情報に相当する。ここで、自動無人航空機100が誘導する犬を、誘導される犬とも表記する。現在の位置の情報の例は、緯度経度の情報、または地図情報上での位置である。
(ステップS202)
検出部103は、送受信部102を介して、他犬の散歩させる他の自動無人航空機から、他の犬の位置情報を取得する。他の犬とは、自動無人航空機100が散歩させる犬以外の犬を意味する。
検出部103は、送受信部102を介して、他犬の散歩させる他の自動無人航空機から、他の犬の位置情報を取得する。他の犬とは、自動無人航空機100が散歩させる犬以外の犬を意味する。
検出部103は、現在の位置情報と他の犬の位置情報とを用いて、誘導される犬の所定距離以内に、他の犬が位置するか否かを検出する。所定距離の例は、100m以上500m以下である。誘導される犬の所定距離以内に、他の犬が位置する場合には、ステップS203に進む。誘導される犬の所定距離以内に、他の犬が位置しない場合には、ステップS206に進む。
(ステップS203)
予測部105は、記憶部104から、地図情報と、散歩経路情報と、視野範囲の情報とを取得する。また、予測部105は、送受信部102を介して、他の自動無人航空機から、他の犬の散歩の経路情報を取得する。
予測部105は、記憶部104から、地図情報と、散歩経路情報と、視野範囲の情報とを取得する。また、予測部105は、送受信部102を介して、他の自動無人航空機から、他の犬の散歩の経路情報を取得する。
(ステップS204)
予測部105は、地図情報と散歩の経路情報と視野範囲の情報とを用いて、散歩経路全体における誘導される犬の視野領域を求める。図4Bに示すように、例えば、予測部105は、地図上において、散歩の全経路を中心として、左右に視野範囲を加えた領域である。
予測部105は、地図情報と散歩の経路情報と視野範囲の情報とを用いて、散歩経路全体における誘導される犬の視野領域を求める。図4Bに示すように、例えば、予測部105は、地図上において、散歩の全経路を中心として、左右に視野範囲を加えた領域である。
予測部105は、求められた散歩経路全体における誘導される犬の視野領域に、他の犬の散歩経路が含まれているか否かを判定する。
誘導される犬の視野領域に、他の犬の散歩経路が含まれている場合には、ステップS205に進む。誘導される犬の視野領域に、他の犬の散歩経路が含まれていない場合には、ステップS206に進む。
(ステップS205)
散歩経路変更部106は、誘導される犬の視野領域と他の犬の散歩経路とが重なる領域の位置情報と、地図情報に基づいて、散歩経路を変更する。散歩経路変更部106は、記憶部104に、変更した散歩経路を記憶させる。
散歩経路変更部106は、誘導される犬の視野領域と他の犬の散歩経路とが重なる領域の位置情報と、地図情報に基づいて、散歩経路を変更する。散歩経路変更部106は、記憶部104に、変更した散歩経路を記憶させる。
(ステップS206)
移動制御部108は、記憶部104に記憶されている散歩経路の情報に基づいて、飛行機構107を制御することにより、自動無人航空機100の移動を制御する。記憶部104には、予め記憶されている散歩経路の情報、又はステップS205で変更された散歩経路の情報が記憶されている。変更された散歩経路の情報が記憶されている場合には、移動制御部108は、変更された散歩経路の情報を予め記憶された散歩経路の情報よりも優先して利用することにより、移動を制御する。
移動制御部108は、記憶部104に記憶されている散歩経路の情報に基づいて、飛行機構107を制御することにより、自動無人航空機100の移動を制御する。記憶部104には、予め記憶されている散歩経路の情報、又はステップS205で変更された散歩経路の情報が記憶されている。変更された散歩経路の情報が記憶されている場合には、移動制御部108は、変更された散歩経路の情報を予め記憶された散歩経路の情報よりも優先して利用することにより、移動を制御する。
なお、ステップS201及びステップS202は、必ずしも実行する必要は無く、ステップS203からステップS206を実行しても良い。ただし、ステップS201及びステップS202を実行することにより、誘導する犬の視野領域に含まれる可能性がある他の犬の数を絞って、散歩を誘導することができる。例えば、他の犬の数が多い可能性がある場所を含む散歩経路を有する場合には、処理の回数を最低限に減らし、接触可能性がある他の犬のみを考慮した散歩経路の変更をできる。
以上のように、本実施の形態にかかる散歩アシスト装置によれば、自動無人航空機が犬を散歩させる際に、犬の視野に他の犬が入ることを防ぐことができる。従って、散歩している犬が他犬に気づくことにより散歩経路から外れること、又は犬同士が喧嘩する等のトラブルを防ぐことができる。
(実施の形態2)
小さい機体を有する自動無人航空機が用いられる場合には、犬の引っ張る力に対して、対抗してリードを引っ張る力を有さない場合がある。また、小さい容量のバッテリーを有する自動無人航空機が用いられる場合には、犬の引っ張る力に対抗してリードを引っ張ることができても、バッテリーの容量を消費する可能性がある。
小さい機体を有する自動無人航空機が用いられる場合には、犬の引っ張る力に対して、対抗してリードを引っ張る力を有さない場合がある。また、小さい容量のバッテリーを有する自動無人航空機が用いられる場合には、犬の引っ張る力に対抗してリードを引っ張ることができても、バッテリーの容量を消費する可能性がある。
したがって、自動無人航空機は、誘導する犬の状態に応じて、散歩経路に存在する固定可能地点に位置することにより、散歩経路を逸脱して移動すること、またはバッテリーの消費を低減することができる。
そこで、実施の形態2に係る散歩アシスト装置2は、自動無人航空機が固定され得る位置の情報を考慮して、散歩経路を変更する。
これにより、所定以上の力で犬が自動無人航空機を引いたときに、散歩アシスト装置2は、電柱を含む固定位置に自動無人航空機を固定することで、犬の動きを所定範囲に制限する。
図5に、実施の形態2に係る散歩アシスト装置2の機能ブロック図を示す。実施形態2に係る散歩アシスト装置2は、実施形態1に係るアシスト装置1と異なり、固定点検出部201、及びワイヤー制御部202を備え、散歩経路変更部206の処理が変更される。本変形例におけるシステムのブロック図を図9に示す。図1との違いは固定可能地点検出部601とワイヤー制御部602を備える点である。
(固定点検出部201)
固定点検出部201は、地図情報における自動無人航空機200を固定でき得る固定点を検出する。例えば、固定点検出部201は、現在の位置から所定の距離範囲内の固定点を検出する。地図情報に含まれる柱の地点を固定点と検出しても良いし、記憶部104に固定点の情報を記憶しても良い。
固定点検出部201は、地図情報における自動無人航空機200を固定でき得る固定点を検出する。例えば、固定点検出部201は、現在の位置から所定の距離範囲内の固定点を検出する。地図情報に含まれる柱の地点を固定点と検出しても良いし、記憶部104に固定点の情報を記憶しても良い。
(ワイヤー制御部202)
ワイヤー制御部202は、ワイヤー203と、固定部とを有する。ワイヤーの一端は、自動無人航空機200と固定されており、ワイヤーの他端は、固定部により脱着可能に固定される。例えば、図6に示すように、自動無人航空機200は、柱を囲むように、ワイヤー203を固定することにより、犬301の急な動きに対しても柱で支えることにより、犬301の移動を制御できる。
ワイヤー制御部202は、ワイヤー203と、固定部とを有する。ワイヤーの一端は、自動無人航空機200と固定されており、ワイヤーの他端は、固定部により脱着可能に固定される。例えば、図6に示すように、自動無人航空機200は、柱を囲むように、ワイヤー203を固定することにより、犬301の急な動きに対しても柱で支えることにより、犬301の移動を制御できる。
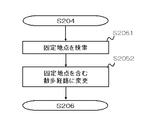
固定点検出部201により、図2に示す処理フローチャートのステップS205の処理が変更される。図7に、散歩アシスト装置2によるステップS205の処理フローを示す。
(ステップS2051)
ステップS204において、誘導される犬の視野領域に、他の犬の散歩経路が含まれている場合には、ステップS2051に進む。固定点検出部201は、現在の位置から所定の距離範囲内の固定点を検出する。
ステップS204において、誘導される犬の視野領域に、他の犬の散歩経路が含まれている場合には、ステップS2051に進む。固定点検出部201は、現在の位置から所定の距離範囲内の固定点を検出する。
(ステップS2052)
散歩経路変更部206は、誘導される犬の視野領域及び他の犬の視野領域が重なる部分の位置情報と、固定点とを受け付ける。散歩経路変更部206は、犬の散歩経路の情報に含まれる始点及び終点と、他の犬の視野領域とが重なる部分の位置情報とに基づいて、重なる部分の位置情報を通らず、固定点を通り、かつ、始点及び終点の結ぶ経路に、散歩経路を変更する。
散歩経路変更部206は、誘導される犬の視野領域及び他の犬の視野領域が重なる部分の位置情報と、固定点とを受け付ける。散歩経路変更部206は、犬の散歩経路の情報に含まれる始点及び終点と、他の犬の視野領域とが重なる部分の位置情報とに基づいて、重なる部分の位置情報を通らず、固定点を通り、かつ、始点及び終点の結ぶ経路に、散歩経路を変更する。
図8に、変更された散歩経路の一例を示す。図7において、地点Aから地点Bまでの経路において、実施形態1でも説明したように、地点Aから地点Bへの直進する経路は、他の犬の散歩経路502に接するために変更される。図7において、地点Aから地点Bまでの経路は、第1の経路候補(地点A→E→F→B)と、第2の経路候補(地点A→G→H→B)とが考えられる。
ここで、図7に示す地図情報において、固定点検出部201により、複数の固定点(800a〜800e)が検出されている。第1の経路候補は、固定点800bを有するのに対して、第2の経路候補は、固定点800a、800c、800d、及び800eを有する。例えば、複数の経路候補のうち、固定点の数が多い経路に変更する。または、固定点の数を、経路候補の距離で除算することにより、単位距離あたりの固定点の数が多い経路に変更しても良い。なお、所定の距離以上の間、固定点を有さない経路は、経路候補から除外しても良い。
次に、図9に、犬301の急な移動に対して、固定点を用いて、自動無人航空機200を固定する処理フローを示す。
(ステップ901)
リード制御部は、所定の時間間隔毎に、誘導する犬がリードを引っ張る力(以下、リード張力と記述)を算出する。所定の時間間隔の例は、10秒から3分である。
リード制御部は、所定の時間間隔毎に、誘導する犬がリードを引っ張る力(以下、リード張力と記述)を算出する。所定の時間間隔の例は、10秒から3分である。
(ステップ902)
リード制御部は、リード張力が閾値以上か否かを判定する。例えば、記憶部104は所定の閾値を記憶している。リード張力が所定の閾値以上の場合には、ステップS903に進む。リード張力が閾値以下だった場合は、処理を終了する。
リード制御部は、リード張力が閾値以上か否かを判定する。例えば、記憶部104は所定の閾値を記憶している。リード張力が所定の閾値以上の場合には、ステップS903に進む。リード張力が閾値以下だった場合は、処理を終了する。
(ステップ903)
固定点検出部201は、地図情報おいて、現在地点と最も近い固定点を検出する。ここで、固定点検出部201は、散歩経路上の固定点を検出しても良いし、現在の位置から所定の距離範囲内の固定点を検出しても良い。
固定点検出部201で、固定点が検出された場合、移動制御部108により、現在の位置から固定点までの経路を移動するように、移動指示が出力される。
固定点検出部201は、地図情報おいて、現在地点と最も近い固定点を検出する。ここで、固定点検出部201は、散歩経路上の固定点を検出しても良いし、現在の位置から所定の距離範囲内の固定点を検出しても良い。
固定点検出部201で、固定点が検出された場合、移動制御部108により、現在の位置から固定点までの経路を移動するように、移動指示が出力される。
(ステップ904)
固定点に到着した後に、ワイヤー制御部201により、固定点と自動無人航空機200とが固定される。
固定点に到着した後に、ワイヤー制御部201により、固定点と自動無人航空機200とが固定される。
(ステップS905)
リード制御部は、リード張力が所定の閾値以下か否かを判定する。リード張力が所定の閾値以上の場合には、ステップS906に進む。リード張力が所定の閾値以下の場合には、ステップS907に進む。
リード制御部は、リード張力が所定の閾値以下か否かを判定する。リード張力が所定の閾値以上の場合には、ステップS906に進む。リード張力が所定の閾値以下の場合には、ステップS907に進む。
(ステップ906)
リード張力が閾値以上の場合には、所定時間の間、固定地点と自動無人航空機200との固定した状態で、固定地点に停滞する。記憶部104に、所定の時間の情報を記憶しても良い。所定時間経過後、ステップS905に進む。
リード張力が閾値以上の場合には、所定時間の間、固定地点と自動無人航空機200との固定した状態で、固定地点に停滞する。記憶部104に、所定の時間の情報を記憶しても良い。所定時間経過後、ステップS905に進む。
(ステップ907)
リード張力が所定の閾値以下になった場合には、ワイヤー制御部201により、固定地点と自動無人航空機200との固定を解除する。具体的には、固定部のワイヤーの固定を解除する。移動制御部108により、固定地点から散歩経路の移動を開始するように移動の指示を出力される。
リード張力が所定の閾値以下になった場合には、ワイヤー制御部201により、固定地点と自動無人航空機200との固定を解除する。具体的には、固定部のワイヤーの固定を解除する。移動制御部108により、固定地点から散歩経路の移動を開始するように移動の指示を出力される。
なお、犬を誘導される対象の例として記載したが、その他の動物であっても良い。誘導される対象は、誘導対象とも表記される。
本発明にかかる散歩アシスト装置は、人間を必要とせず、誘導対象の散歩を含む誘導を実現できる。
100、200 自動無人航空機
101 位置取得部
102 送受信部
103 検出部
104 記憶部
105 予測部
106、206 散歩経路変更部
107 飛行機構
108 移動制御部
101 位置取得部
102 送受信部
103 検出部
104 記憶部
105 予測部
106、206 散歩経路変更部
107 飛行機構
108 移動制御部
Claims (12)
- 自動無人航空機を用いて、前記自動無人航空機とリードで接続される誘導対象の散歩をアシストする散歩アシスト方法であって、
(a)地図情報と、誘導対象の散歩経路の情報と、誘導対象の視野範囲の情報と、他の散歩アシスト装置の誘導対象である他の誘導対象の散歩経路の情報とを取得し、
(b)前記誘導対象の散歩経路の情報と前記誘導対象の視野範囲の情報とに基づいて、前記誘導対象の散歩中の視野領域を求め、前記地図情報の上において、前記視野領域に前記他の誘導対象の散歩経路とが重なる領域があるか否かを判定し、
(c)前記視野領域に前記他の誘導対象の散歩経路が含まれている場合には、前記視野領域と前記他の誘導対象の散歩経路とが重なる領域を用いて、前記誘導対象の散歩経路を変更し、
(d)前記変更した散歩経路を用いて、前記自動無人航空機の移動を制御する信号を出力する、
散歩アシスト方法。 - さらに、
(e)前記誘導対象の位置を取得し、前記他の誘導対象の位置を取得し、
前記誘導対象の位置と前記他の誘導対象の位置とが所定の距離以内の場合に、前記(a)〜前記(d)を実行する、
請求項1に記載の散歩アシスト方法。 - さらに、
(f)前記地図情報において、自動無人航空機と固定しうる固定点の位置を検出し、
前記(c)において、前記視野領域と前記他の誘導対象の散歩経路とが重なる領域と、前記固定点の位置とを用いて、前記誘導対象の散歩経路を変更する、
請求項1に記載の散歩アシスト方法。 - さらに、
(g)前記リードの張力が所定の閾値以上か否かを検出し、
(h)前記リードの張力が所定の閾値以上の場合には、前記地図情報における自動無人航空機と固定しうる固定点の位置を検出し、
(i)前記固定点の位置に、前記自動無人航空機を移動するように制御し、
(j)前記固定点の位置に到着した後に、前記自動無人航空機が有するワイヤー制御部とワイヤーとを用いて、前記自動無人航空機と前記固定点とを固定する、
請求項1に記載の散歩アシスト方法。 - コンピュータにより、自動無人航空機を用いて、前記自動無人航空機とリードで接続される誘導対象の散歩をアシストするプログラムであって、
(a)地図情報と、誘導対象の散歩経路の情報と、誘導対象の視野範囲の情報と、他の散歩アシスト装置の誘導対象である他の誘導対象の散歩経路の情報とを取得させ、
(b)前記誘導対象の散歩経路の情報と前記誘導対象の視野範囲の情報とに基づいて、前記誘導対象の散歩中の視野領域を求め、前記地図情報の上において、前記視野領域に前記他の誘導対象の散歩経路とが重なる領域があるか否かを判定させ、
(c)前記視野領域に前記他の誘導対象の散歩経路が含まれている場合には、前記視野領域と前記他の誘導対象の散歩経路とが重なる領域を用いて、前記誘導対象の散歩経路を変更させ、
(d)前記変更した散歩経路を用いて、前記自動無人航空機の移動を制御する信号を出力させる、
プログラム。 - さらに、
(e)前記誘導対象の位置を取得し、前記他の誘導対象の位置を取得させ、
前記誘導対象の位置と前記他の誘導対象の位置とが所定の距離以内の場合に、前記(a)〜前記(d)を実行させる、
請求項5に記載のプログラム。 - さらに、
(f)前記地図情報において、自動無人航空機と固定しうる固定点の位置を検出させ、
前記(c)において、前記視野領域と前記他の誘導対象の散歩経路とが重なる領域と、前記固定点の位置とを用いて、前記誘導対象の散歩経路を変更させる、
請求項5に記載のプログラム。 - さらに、
(g)前記リードの張力が所定の閾値以上か否かを検出させ、
(h)前記リードの張力が所定の閾値以上の場合には、前記地図情報における自動無人航空機と固定しうる固定点の位置を検出させ、
(i)前記固定点の位置に、前記自動無人航空機を移動するように制御させ、
(j)前記固定点の位置に到着した後に、前記自動無人航空機が有するワイヤー制御部とワイヤーとを用いて、前記自動無人航空機と前記固定点とを固定させる、
請求項5に記載のプログラム。 - 自動無人航空機を用いて、前記自動無人航空機とリードで接続される誘導対象の散歩をアシストする散歩アシスト装置であって、
前記自動無人航空機は、
飛行機構と、
前記自動無人航空機の位置を取得する位置取得部と、
地図情報と、誘導対象の散歩経路の情報と、誘導対象の視野範囲の情報と、他の散歩アシスト装置の誘導対象である他の誘導対象の散歩経路の情報とを取得し、前記誘導対象の散歩経路の情報と前記誘導対象の視野範囲の情報とに基づいて、前記誘導対象の散歩中の視野領域を求め、前記地図情報の上において、前記視野領域に前記他の誘導対象の散歩経路とが重なる領域があるか否かを判定する予測部と、
前記視野領域に前記他の誘導対象の散歩経路が含まれている場合に、前記視野領域と前記他の誘導対象の散歩経路とが重なる領域を用いて、前記誘導対象の散歩経路を変更する散歩経路変更部と、
前記変更した散歩経路を用いて、前記自動無人航空機の移動を制御する信号を前記飛行機構に出力する移動制御部と、
散歩アシスト装置。 - さらに、
前記誘導対象の位置を取得する位置取得部と、
前記他の誘導対象の位置を取得し、前記誘導対象の位置と前記他の誘導対象の位置とが所定の距離以内か否かを判定する検出部とを備え、
前記検出部が、前記誘導対象の位置と前記他の誘導対象の位置とが所定の距離以内の場合に、前記予測部は、前記視野領域に前記他の誘導対象の散歩経路とが重なる領域があるか否かを判定する、
請求項9に記載の散歩アシスト装置。 - さらに、
前記地図情報において、自動無人航空機と固定しうる固定点の位置を検出する固定点検出部とを備え、
前記散歩経路変更部は、前記視野領域と前記他の誘導対象の散歩経路とが重なる領域と、前記固定点の位置とを用いて、前記誘導対象の散歩経路を変更する、
請求項9に記載の散歩アシスト装置。 - さらに、
前記リードの張力が所定の閾値以上か否かを検出するリード制御部と、
前記地図情報における自動無人航空機と固定しうる固定点の位置を検出する固定点検出部と、
ワイヤーにより前記自動無人航空機と前記固定点とを固定するワイヤー制御部と
を備え、
前記移動制御部は、前記リードの張力が所定の閾値以上の場合に、前記固定点の位置に、前記自動無人航空機を移動するように制御し、
前記ワイヤー制御部は、前記固定点の位置に到着した後に、前記ワイヤーにより前記自動無人航空機と前記固定点とを固定する、
請求項1に記載の散歩アシスト方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015125207A JP2017006051A (ja) | 2015-06-23 | 2015-06-23 | 散歩アシスト方法、散歩アシスト装置、及びプログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015125207A JP2017006051A (ja) | 2015-06-23 | 2015-06-23 | 散歩アシスト方法、散歩アシスト装置、及びプログラム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017006051A true JP2017006051A (ja) | 2017-01-12 |
Family
ID=57760377
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015125207A Pending JP2017006051A (ja) | 2015-06-23 | 2015-06-23 | 散歩アシスト方法、散歩アシスト装置、及びプログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2017006051A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111397621A (zh) * | 2020-03-25 | 2020-07-10 | 咪咕互动娱乐有限公司 | 散步路径规划方法、装置及存储介质 |
| CN114291088A (zh) * | 2020-10-02 | 2022-04-08 | 丰田自动车株式会社 | 引导车辆 |
-
2015
- 2015-06-23 JP JP2015125207A patent/JP2017006051A/ja active Pending
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111397621A (zh) * | 2020-03-25 | 2020-07-10 | 咪咕互动娱乐有限公司 | 散步路径规划方法、装置及存储介质 |
| CN111397621B (zh) * | 2020-03-25 | 2023-10-17 | 咪咕互动娱乐有限公司 | 散步路径规划方法、装置及存储介质 |
| CN114291088A (zh) * | 2020-10-02 | 2022-04-08 | 丰田自动车株式会社 | 引导车辆 |
| JP2022060065A (ja) * | 2020-10-02 | 2022-04-14 | トヨタ自動車株式会社 | 誘導車両 |
| JP7259824B2 (ja) | 2020-10-02 | 2023-04-18 | トヨタ自動車株式会社 | 誘導車両 |
| US11718967B2 (en) | 2020-10-02 | 2023-08-08 | Toyota Jidosha Kabushiki Kaisha | Guidance vehicle |
| CN114291088B (zh) * | 2020-10-02 | 2023-10-20 | 丰田自动车株式会社 | 引导车辆 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101751298B1 (ko) | 차량 경로 예측 방법 및 장치 | |
| US10877162B2 (en) | Terrestrial based positioning systems and methods | |
| CN110226143B (zh) | 前导无人机的方法 | |
| ES2767677T3 (es) | Ayudas de navegación para sistemas aéreos no tripulados en un entorno sin GPS | |
| US9079307B2 (en) | Autonomous locomotion apparatus, autonomous locomotion method, and program for autonomous locomotion apparatus | |
| US9964950B2 (en) | Driving assistance apparatus and driving assistance method | |
| CN111295627B (zh) | 水下领航无人机系统 | |
| US8972166B2 (en) | Proactive mitigation of navigational uncertainty | |
| JP6111490B2 (ja) | 位置検知システム及び位置検知方法 | |
| KR101934368B1 (ko) | 앙상블 인공 신경망 조합을 이용한 자율 운항 선박 제어 장치 및 그 방법 | |
| CN111626538A (zh) | 用于确定行驶策略的方法以及系统 | |
| JP7552449B2 (ja) | 交差点管制システム、交差点管制方法、及び、プログラム | |
| RU2016115695A (ru) | Способ и устройство для программируемого управления траекторией движения пользователя к лифту/эскалатору | |
| CN107074282A (zh) | 用于运行车辆的方法和装置 | |
| US20140022121A1 (en) | Navigating in areas of uncertain positioning data | |
| KR20160086921A (ko) | 측위 시스템 및 프로그램 | |
| JP2023072001A (ja) | 情報処理装置、制御方法、プログラム及び記憶媒体 | |
| JP2024052926A (ja) | 情報処理装置、情報処理方法、情報処理用プログラム、及び記録媒体 | |
| JP2017006051A (ja) | 散歩アシスト方法、散歩アシスト装置、及びプログラム | |
| CN112215450B (zh) | 对乘客转移的基于风险的评估 | |
| JP2017206072A (ja) | 飛行制御装置及び飛行制御方法 | |
| US20180267546A1 (en) | Navigation system, navigation method, and recording medium | |
| JP6742589B2 (ja) | 位置推定システム | |
| JP6475532B2 (ja) | 無人航空機の飛行制御装置、無人航空機の飛行制御方法及び無人航空機の飛行制御プログラム | |
| WO2023112367A1 (ja) | 情報出力方法、および、情報出力装置 |