JP2017012073A - 歩行型作業機のハンドル - Google Patents
歩行型作業機のハンドル Download PDFInfo
- Publication number
- JP2017012073A JP2017012073A JP2015131686A JP2015131686A JP2017012073A JP 2017012073 A JP2017012073 A JP 2017012073A JP 2015131686 A JP2015131686 A JP 2015131686A JP 2015131686 A JP2015131686 A JP 2015131686A JP 2017012073 A JP2017012073 A JP 2017012073A
- Authority
- JP
- Japan
- Prior art keywords
- handle
- handles
- bridge pipe
- operation lever
- right handles
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000003466 welding Methods 0.000 claims abstract description 15
- 239000002828 fuel tank Substances 0.000 claims description 12
- 239000000446 fuel Substances 0.000 claims description 8
- 230000002787 reinforcement Effects 0.000 abstract description 4
- 230000008030 elimination Effects 0.000 abstract description 2
- 238000003379 elimination reaction Methods 0.000 abstract description 2
- 230000002146 bilateral effect Effects 0.000 abstract 1
- 238000003971 tillage Methods 0.000 description 8
- 238000002347 injection Methods 0.000 description 3
- 239000007924 injection Substances 0.000 description 3
- 230000003014 reinforcing effect Effects 0.000 description 2
- 210000001015 abdomen Anatomy 0.000 description 1
- 230000001154 acute effect Effects 0.000 description 1
- 238000005452 bending Methods 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000037431 insertion Effects 0.000 description 1
- 238000003780 insertion Methods 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 239000002689 soil Substances 0.000 description 1
Images


Landscapes
- Soil Working Implements (AREA)
- Harvester Elements (AREA)
Abstract
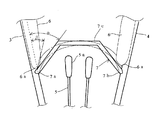
【解決手段】機体1の中央上部に設けた枢支部2に、後方へ左右末広がりとなる左右のハンドル3、4を上下高さ調節可能に突設し、ハンドル3、4には前端部3a、4aがハンドルのほぼ中間部位に位置した操作盤6を備え、機体中央上部の左右のハンドル3、4間に後方に向けて操作レバー5を設けた歩行型作業機において、ハンドル3、4の操作盤6の前端部6aの前側で近接した部位3b、4bを基点として、左右対称な台形上部形状に後方へ膨出した屈曲部7cを形成したブリッジパイプ7を溶接で固着し、グリップ部5aが操作盤の前端部6aよりも後方位置となり且つハンドル3、4及び操作レバー5を移動させてもグリップ部5aがブリッジパイプ7に接触しない長さの操作レバー5を備える。
【選択図】図1
Description
又、畝間用の作業機では別の畝への移動時などにおいて、ロータリでの耕耘作業を一旦停止させハンドルを下げてロータリを浮かせつつ方向転換することが行われており、その際、下げたハンドルが地表に近づき過ぎて正常な運転ができなくなるので、ハンドルを高い位置に調節できる上下可動式のハンドルが使用され、更にハンドルの中間部位にはクラッチ等を操作するための操作盤が設けられる。
従って、該畝間用の作業機では、ハンドルの上げ下げによって操作盤の前側に設けられた補強用の架橋パイプに操作レバーが接触しないように短い操作レバーが使用されている。
この結果、無理な姿勢が強いられることとなるが、従来、この無理な姿勢が当然のものと受け入れてしまい操作の不便さに感付いていなかった嫌いがある。
その際、ハンドルを上下高さ調節した際には、前記ブリッジパイプに操作レバーのグリップ部が接触せず、又、操作レバーの上下左右の操作を行った際には、前記ブリッジパイプに操作レバーのグリップ部が接触せず、この結果、ハンドルの上下高さ調節及び操作レバーの上下左右操作をしたとき前記操作レバーのグリップ部がいずれの位置においても前記ブリッジパイプに接触しなくなり、単に操作レバーの操作に支障を生させないだけではなく、左右のハンドルの間に身体を入れることで操作レバーは身体に極めて近い位置となり、楽な姿勢で操作レバーを操作することが可能となる。
即ち、左右のハンドル間の操作レバーの無理な姿勢での操作の解消と、左右のハンドルのブリッジパイプによる補強とが両立可能となる。
又、左右のハンドルを上げると操作レバーのグリップ部がハンドル及びブリッジパイプよりも下側に隠れてその上側のハンドル及びブリッジパイプにガードされ、操作レバーの不用意な操作による急変速等の誤作動が防止されることで安全性を高めることが可能となる。
本発明は農業用の歩行型作業機のハンドルであり、歩行型作業機は各種あるが、図1に示すように、機体1の中央下部に左右一対の駆動車輪12を備え、機体1の前側に耕耘用のロータリ15を備えた畝間作業機を例に説明する。
なお、図1及び図2中の符号13は上下させてロータリ15の耕耘深さを調節する耕耘深さ調整輪であり、符号14はロータリ15で掻き上げた土を側方へ導き放出させるためのロータリカバーである。
該畝間用の作業機は左右のハンドル3、4の後端部のハンドルグリップ9を左右の手で持って操縦し、畝間を走行させつつロータリ15で耕耘するものである。
図2の(イ)はハンドル3、4を下へ回動させて燃料タンク10近くまで下げた状態を示し、(ロ)はハンドル3、4を上げて耕耘部を上げた状態を示している。
該ハンドル高さ調節部8は、図示しないが、枢支部を中心とする円形状の湾曲面に上下一列に数個並んだ段差孔を有する調節板を左右のハンドル3、4の基部付近に固着し、該調節板の内側から前記段差孔に対してピンがハンドルに設けた操作盤のレバー操作で出没できるように設けられ、ハンドル3、4を上下させて任意の位置で前記段差孔にピンをワイヤーを介してレバー操作して差し込むことでハンドル3、4の高さ位置を固定する仕組みとすることが可能である。
例えば、道路を走行する場合には、図2の(ロ)に示すように、機体前部のロータリ15が路面に接触しないようにロータリ15を高く上げて移動するが、その際、ロータリ15を上げると駆動車輪12を境に機体後部側が下がってハンドルグリップ9の位置が低くなるので、予め前記ハンドル高さ調節部8でハンドル3、4を高い位置に調節しておくことで、該ハンドルグリップ9が運転し易い高さとなる。
該操作盤6にはハンドル高さ調節部8のための前記ピンの出没操作を行うためのレバーや耕耘するために付属させた各種可動部のクラッチ等をワイヤーを介して操作するレバーを後方へ向けて前記ハンドルグリップ9にできるだけ近づけるように設けるが、該操作盤6が前後に長く大きなものは、その該操作盤6の前端部6aが該ハンドル3、4のほぼ中間部位3a、4aに達することとなる。
その際、前記エンジン部の位置が機体1の後部にあるため、左右のハンドル3、4間に入れた身体がエンジン部よりも前へは進めず、操作レバー5までは手が届き難くなっているので、前記操作レバー5は、先端のグリップ部5aがハンドルを握った運転者の身体の近くで楽に操作できるように、左右のハンドル3、4に設けた操作盤6の前端部6aよりも後方となる長い金属棒体を使用する。
なお、図1及び図2には、該操作レバー5の基部と先端部との間をその後部に配設した燃料タンク10を避けるように上方に屈曲させた態様を示している。
その際に、該ブリッジパイプ7は前記操作レバー5先端部のグリップ部5aに対して、ハンドル3、4が上下どの位置にあっても又操作レバー5がどの操作位置にあっても全く接触しないように後方へ膨出させた屈曲部7cを形成する。
更に、前記ブリッジパイプ7の左右の両側が前記操作盤6に内側部分に当たってしまい、ブリッジパイプ7を取り付けられなくなってしまうこともある。
従って、前記ブリッジパイプ7の後方への膨出の程度は、ハンドル補強材としての強度と、溶接し易さ、前記操作盤6との位置関係等を考慮して決めなければなければならない。
このように前記ハンドル3、4に対してブリッジパイプ7を湾曲させて小さい角度で鋭角に突き当てるとその部分に溶接棒が入り難くなって良好な溶接を行うことできなくなるが、本発明では大きい角度に突き当てることで余裕を持って溶接棒を溶接部分に押し当て良好な溶接を行うことが可能となり、溶接部分の強度を高めることが可能となる。
なお、仮に、台形上部形状ではなく二等辺三角形上部形状にした場合には、三角形を低く形成すれば左右のハンドルに対して大きい角度で突き当てることができるが懐が浅くなり、大きく後方へ膨出できず長い操作レバー5を設けることができず、又高い三角形とすると後方に向かって先端が鋭く尖ってしまい左右のハンドル間の運転者の腹部に突き当たるので好ましくないものとなる。
なお、ブリッジパイプ7の台形上部形状とは、台形の上辺部分を上へ湾曲させた形状を含むものである。
例えば、作業機を旋回させて別の畝へ移動させる際などには、機体前のロータリ部を地面から浮かせるためにハンドル3、4を下げるが、その際、長い操作レバー5に当たらずに、ハンドル3、4を高く位置に調節することができ、ハンドル3、4を高い位置に調節することでハンドル3、4の位置が過度に低くならず、適度の高さとなった左右のハンドル3、4の間に身体を入れ、無理のない姿勢での旋回を行うことができようになる。
更に、耕耘作業をする際には、ハンドル3、4を低い位置に調節することにより、操作レバー5のグリップ部5aが左右のハンドル3、4間の上に突出されるのでクラッチ等の操作がし易くなる。
この形態では、ブリッジパイプ7の屈曲部7cが燃料注入口のキャップ11から離れるのでブリッジパイプ7が該キャップ11の着脱や給油ノズルの差し込み等の給油作業の邪魔にならず、楽に給油を行えるようになる。
2 枢支部
3 右のハンドル
3a 右のハンドルの中間部位
3b 右のハンドルの操作盤の前端部の前側で近接した部位
4 左のハンドル
4a 左のハンドルの中間部位
4b 左のハンドルの操作盤の前端部の前側で近接した部位
5 操作レバー
5a 操作レバーのグリップ部
6 操作盤
6a 操作盤の前端部
7 ブリッジパイプ
7a、7b ブリッジパイプの端部
7c 屈曲部
8 ハンドル高さ調節部
9 ハンドルグリップ
10 燃料タンク
11 キャップ
12 駆動車輪
13 耕耘深さ調整輪
14 ロータリカバー
15 ロータリ
16 エンジン
α 台形上部形状の溶接部分のブリッジパイプの突き当て角度
β 単純な湾曲形状の溶接部分のブリッジパイプの突き当て角度
Claims (4)
- 機体の中央上部に設けた枢支部に、後方へ左右末広がりとなる左右のハンドルを上下に回動させて高さ調節可能に突設し、該左右のハンドルには前端部が該ハンドルのほぼ中間部位に位置した操作盤を備え、該機体中央上部の前記左右のハンドル間に後方に向けて変速等を操作する操作レバーを設けた農業用の歩行型作業機において、
前記左右のハンドルの操作盤の前端部の前側で近接した部位を基点として、左右対称な台形上部形状に後方へ膨出した屈曲部を形成したブリッジパイプを前記基点に溶接で固着し、
前記操作レバーのグリップ部が前記操作盤の前端部よりも後方位置となり且つ前記ハンドルの上下高さ調節及び前記操作レバーの上下左右操作で移動させても該グリップ部が前記ブリッジパイプに接触しない長さの操作レバーを備えたことを特徴とする歩行型作業機のハンドル。 - 操作レバーの高さを、左右のハンドルを上下高さ調節して上げたときには該操作レバーのグリップ部が左右のハンドル間の下側となり、下げたときには該操作レバーのグリップ部が左右のハンドル間の上側となるように設定したことを特徴とする請求項1に記載の歩行型作業機のハンドル。
- ブリッジパイプの屈曲部を、操作レバーのグリップ部を握った手がブリッジパイプに接触しない距離を保持できるように形成したことを特徴とする請求項1又は2に記載の歩行型作業機のハンドル。
- エンジン及び燃料タンク等のエンジン部を機体の後部に、ロータリ等の耕耘部を機体の前部に配設し、ブリッジパイプの屈曲部を、前記エンジン部の上部に設けた燃料タンクの燃料注入口を避けるように形成したことを特徴とする請求項1から3のうちのいずれかに記載の歩行型作業機のハンドル。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015131686A JP6855158B2 (ja) | 2015-06-30 | 2015-06-30 | 歩行型作業機 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015131686A JP6855158B2 (ja) | 2015-06-30 | 2015-06-30 | 歩行型作業機 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017012073A true JP2017012073A (ja) | 2017-01-19 |
| JP6855158B2 JP6855158B2 (ja) | 2021-04-07 |
Family
ID=57828436
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015131686A Active JP6855158B2 (ja) | 2015-06-30 | 2015-06-30 | 歩行型作業機 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6855158B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109699213A (zh) * | 2019-03-06 | 2019-05-03 | 甘肃良源农业有限责任公司 | 一种用于农业的翻土设备 |
Citations (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2967579A (en) * | 1958-02-18 | 1961-01-10 | Rotary Hoes Ltd | Power-driven cultivating machine or tractor |
| JPS5120963Y2 (ja) * | 1971-12-04 | 1976-06-01 | ||
| JPS5136888Y2 (ja) * | 1972-04-20 | 1976-09-09 | ||
| JPS5626513U (ja) * | 1979-08-04 | 1981-03-11 | ||
| JPS645663Y2 (ja) * | 1983-01-29 | 1989-02-13 | ||
| JP3017478U (ja) * | 1995-04-27 | 1995-10-31 | 茂樹 佐野 | 耕耘機におけるバック走行装置 |
| JP2001231304A (ja) * | 2000-02-25 | 2001-08-28 | Mitsubishi Agricult Mach Co Ltd | 表層耕耘整地機 |
| JP4167870B2 (ja) * | 2002-09-12 | 2008-10-22 | リョービ株式会社 | 耕耘機 |
| JP2010173368A (ja) * | 2009-01-27 | 2010-08-12 | Kubota Corp | 歩行型作業機 |
| JP2014065425A (ja) * | 2012-09-26 | 2014-04-17 | Kubota Corp | 歩行型作業機の変速レバー牽制構造 |
| JP2014217297A (ja) * | 2013-05-07 | 2014-11-20 | 株式会社クボタ | 歩行型作業機 |
| JP3195621U (ja) * | 2014-11-11 | 2015-01-29 | 関東農機株式会社 | 耕耘深さ調節輪の高低調節装置 |
-
2015
- 2015-06-30 JP JP2015131686A patent/JP6855158B2/ja active Active
Patent Citations (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2967579A (en) * | 1958-02-18 | 1961-01-10 | Rotary Hoes Ltd | Power-driven cultivating machine or tractor |
| JPS5120963Y2 (ja) * | 1971-12-04 | 1976-06-01 | ||
| JPS5136888Y2 (ja) * | 1972-04-20 | 1976-09-09 | ||
| JPS5626513U (ja) * | 1979-08-04 | 1981-03-11 | ||
| JPS645663Y2 (ja) * | 1983-01-29 | 1989-02-13 | ||
| JP3017478U (ja) * | 1995-04-27 | 1995-10-31 | 茂樹 佐野 | 耕耘機におけるバック走行装置 |
| JP2001231304A (ja) * | 2000-02-25 | 2001-08-28 | Mitsubishi Agricult Mach Co Ltd | 表層耕耘整地機 |
| JP4167870B2 (ja) * | 2002-09-12 | 2008-10-22 | リョービ株式会社 | 耕耘機 |
| JP2010173368A (ja) * | 2009-01-27 | 2010-08-12 | Kubota Corp | 歩行型作業機 |
| JP2014065425A (ja) * | 2012-09-26 | 2014-04-17 | Kubota Corp | 歩行型作業機の変速レバー牽制構造 |
| JP2014217297A (ja) * | 2013-05-07 | 2014-11-20 | 株式会社クボタ | 歩行型作業機 |
| JP3195621U (ja) * | 2014-11-11 | 2015-01-29 | 関東農機株式会社 | 耕耘深さ調節輪の高低調節装置 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109699213A (zh) * | 2019-03-06 | 2019-05-03 | 甘肃良源农业有限责任公司 | 一种用于农业的翻土设备 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6855158B2 (ja) | 2021-04-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8931586B2 (en) | Working vehicle | |
| US6860334B2 (en) | Walk-behind tiller | |
| US5197551A (en) | Extended drag tool for a front tine tiller | |
| US7438517B2 (en) | Tractor | |
| JP2017012073A (ja) | 歩行型作業機のハンドル | |
| JP5634493B2 (ja) | 耕耘機 | |
| JP6007842B2 (ja) | 歩行型耕耘機 | |
| JP2012249591A (ja) | 抵抗棒と補助輪の切替装置及びそれを備えた歩行型作業機 | |
| JP6656852B2 (ja) | ロータリ耕耘機 | |
| US2762284A (en) | Tractor-mounted hitch | |
| JP3884654B2 (ja) | ロータリ耕耘装置 | |
| JP4275040B2 (ja) | ロータリ | |
| US2826130A (en) | Hitch assembly for connecting a farm tractor with a ground working farm implement | |
| JP3625130B2 (ja) | ロータリー耕耘装置のリヤカバー | |
| JPS6223296Y2 (ja) | ||
| JP4746522B2 (ja) | 歩行型作業機 | |
| JP3690071B2 (ja) | ロータリ耕耘具の防護装置 | |
| JP4057506B2 (ja) | 部分深耕機 | |
| JP2004217117A (ja) | 歩行型ロータリ耕耘機のクラッチレバー構造 | |
| JP2006006162A (ja) | ロータリ耕耘装置 | |
| JP4084012B2 (ja) | フロントドーザを備えた農作業機における操作レバーの配置構造 | |
| JP3693830B2 (ja) | ロータリ耕耘機におけるカバー体の連結構造 | |
| JP2005058127A (ja) | ロ−タリ耕耘装置及び耕土均平装置 | |
| JP2008035826A (ja) | 農用トラクタ | |
| JP2002058303A (ja) | 歩行型耕耘機の走行装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180625 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190213 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190402 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190530 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20191105 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191228 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200616 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20210106 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20210106 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210302 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210317 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6855158 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |