JP2017013958A - エレベータ及びエレベータの制振方法 - Google Patents
エレベータ及びエレベータの制振方法 Download PDFInfo
- Publication number
- JP2017013958A JP2017013958A JP2015132325A JP2015132325A JP2017013958A JP 2017013958 A JP2017013958 A JP 2017013958A JP 2015132325 A JP2015132325 A JP 2015132325A JP 2015132325 A JP2015132325 A JP 2015132325A JP 2017013958 A JP2017013958 A JP 2017013958A
- Authority
- JP
- Japan
- Prior art keywords
- car
- room
- elevator
- actuator
- output
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images









Landscapes
- Cage And Drive Apparatuses For Elevators (AREA)
Abstract
Description
上記した以外の課題、構成及び効果は、以下の実施形態の説明により明らかにされる。
[エレベータの構成]
まず、本発明の第1の実施形態に係るエレベータの構成について、図1を参照して説明する。
図1は、本発明の第1の実施形態に係るエレベータの構成例を示す構成図である。
次に、乗りかご120の構成について、図2及び図3を参照して説明する。
図2は、乗りかご120を示す正面図である。図3は、乗りかご120を示す側面図である。
制振装置200は、減衰装置201と、アクチュエータ202と、変位検出器203と、制御部204と、乗りかご停止判断部205と、かご停止検出部206とを備えている。
次に、従来の乗りかごの振動抑制について、図4〜図8を参照して説明する。
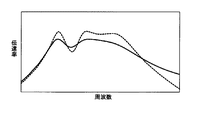
図4は、従来の乗りかごを示す正面図である。図5は、従来の乗りかごの第1の例における振動モードを示す説明図である。図6は、図5に示す振動モードにおける振動の伝達特性図である。図7は、従来の乗りかごの第2の例における振動モードを示す説明図である。図8は、図7に示す振動モードにおける振動の伝達特性図である。
次に、エレベータ1において実行される制振処理(方法)について、図9を参照して説明する。
図9は、エレベータ1の制振処理の一例を示すフローチャートである。
[エレベータの構成]
第2の実施形態に係るエレベータは、第1の実施形態に係るエレベータ1と同様の構成を有しており、異なる点は、アクチュエータ202,302にブレーキが取り付けられている点である。このアクチュエータ202,302のブレーキは、かご室121とかご枠122が相対変位を生じないように、かご室121とかご枠122とを固定する。なお、かご室121とかご枠122が相対変位を生じるようにする場合は、ブレーキを開放する。
次に、第2の実施形態に係るエレベータにおいて実行される制振処理(方法)について、図10を参照して説明する。
図10は、第2の実施形態に係るエレベータの制振処理の一例を示すフローチャートである。
Claims (8)
- かご室及びかご枠を有する乗りかごと、
前記乗りかごを吊持するロープと、
前記ロープが巻き掛けられ、前記ロープを駆動して前記乗りかごを昇降させる巻上機と、
前記乗りかごの昇降を案内するガイドレールと、
前記かご室と前記かご枠との間に配置され、前記かご室と前記かご枠との相対的な上下方向の振動を抑制する上下方向振動抑制部と、
前記かご室と前記かご枠との間に配置され、前記かご室と前記かご枠との相対的な横方向の振動を減衰させる横方向減衰部と、
を備えたエレベータにおいて、
前記乗りかごが停止しているか否かを検出するかご停止検出部と、
前記かご室と前記かご枠との相対的な横方向の変位を検出する変位検出器と、
前記かご室と前記かご枠との間に配置され、前記かご室又は前記かご枠に横方向の力を作用するアクチュエータと、
前記変位検出器と前記かご停止検出部の情報に基づいて、前記アクチュエータに制御信号を出力する制御部と、を有する
ことを特徴とするエレベータ。 - 前記横方向減衰部、前記変位検出器、及び前記アクチュエータは、乗りかご前後方向用と左右方向用にそれぞれ1組以上設ける
ことを特徴とする請求項1に記載のエレベータ。 - 前記かご停止検出部は、前記巻上機に設置されたモータの回転を検出するエンコーダから出力される情報に基づいて乗りかごが停止しているか否かを判断する
ことを特徴とする請求項1に記載のエレベータ。 - 前記かご停止検出部は、前記かご室に設けられたドアの開閉を検出するドア開閉検出器から出力される情報に基づいて乗りかごが停止しているか否かを判断する
ことを特徴とする請求項1に記載のエレベータ。 - 前記かご停止検出部は、前記乗りかごの昇降速度を監視する調速機に設置されたエンコーダの出力に基づいて乗りかごが停止しているか否かを判断する
ことを特徴とする請求項1に記載のエレベータ。 - 前記制御部は、前記かご停止検出部により前記乗りかごが停止していると判断された場合に、前記変位検出器の出力と第1の比例定数に基づいて前記アクチュエータの出力を決定し、前記かご停止検出部により前記乗りかごが停止していないと判断された場合に、前記変位検出器の出力と第2の比例定数に基づいて前記アクチュエータの出力を決定し、
前記第1の比例定数は、前記第2の比例定数よりも大きい
ことを特徴とする請求項1に記載のエレベータ。 - 前記制御部は、前記かご停止検出部により前記乗りかごが停止していると判断された場合に、前記アクチュエータに取り付けられたブレーキを作動させ、前記かご停止検出部により前記乗りかごが停止していないと判断された場合に、前記ブレーキを開放し、前記変位検出器の出力に比例した調整出力値を前記アクチュエータに出力させる
ことを特徴とする請求項1に記載のエレベータ。 - かご室及びかご枠を有する乗りかごが停止しているか否かをかご停止検出部により検出し、
前記かご停止検出部の検出結果と、前記かご室と前記かご枠との相対的な横方向の変位を検出する変位検出器の出力とに基づいて、制御部が前記かご室又は前記かご枠に横方向の力を作用するアクチュエータの出力を決定し、
前記制御部により決定された出力でアクチュエータを動作させる
ことを特徴とするエレベータの制振方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015132325A JP6527036B2 (ja) | 2015-07-01 | 2015-07-01 | エレベータ及びエレベータの制振方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015132325A JP6527036B2 (ja) | 2015-07-01 | 2015-07-01 | エレベータ及びエレベータの制振方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017013958A true JP2017013958A (ja) | 2017-01-19 |
| JP6527036B2 JP6527036B2 (ja) | 2019-06-05 |
Family
ID=57829799
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015132325A Active JP6527036B2 (ja) | 2015-07-01 | 2015-07-01 | エレベータ及びエレベータの制振方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6527036B2 (ja) |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0592886A (ja) * | 1991-08-07 | 1993-04-16 | Mitsubishi Electric Corp | エレベーターの制振装置 |
| JPH07187549A (ja) * | 1993-12-27 | 1995-07-25 | Toshiba Corp | エレベータ |
| JPH09110341A (ja) * | 1995-10-23 | 1997-04-28 | Toshiba Corp | エレベータかご室の制振装置 |
| JP2009051660A (ja) * | 2007-08-29 | 2009-03-12 | Mitsubishi Electric Corp | エレベータの制御装置 |
| WO2011158301A1 (ja) * | 2010-06-18 | 2011-12-22 | 株式会社 日立製作所 | エレベータシステム |
| JP2013184799A (ja) * | 2012-03-08 | 2013-09-19 | Mitsubishi Electric Corp | 油圧式エレベータ、及び油圧式エレベータの戸開走行防止方法 |
-
2015
- 2015-07-01 JP JP2015132325A patent/JP6527036B2/ja active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0592886A (ja) * | 1991-08-07 | 1993-04-16 | Mitsubishi Electric Corp | エレベーターの制振装置 |
| JPH07187549A (ja) * | 1993-12-27 | 1995-07-25 | Toshiba Corp | エレベータ |
| JPH09110341A (ja) * | 1995-10-23 | 1997-04-28 | Toshiba Corp | エレベータかご室の制振装置 |
| JP2009051660A (ja) * | 2007-08-29 | 2009-03-12 | Mitsubishi Electric Corp | エレベータの制御装置 |
| WO2011158301A1 (ja) * | 2010-06-18 | 2011-12-22 | 株式会社 日立製作所 | エレベータシステム |
| JP2013184799A (ja) * | 2012-03-08 | 2013-09-19 | Mitsubishi Electric Corp | 油圧式エレベータ、及び油圧式エレベータの戸開走行防止方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6527036B2 (ja) | 2019-06-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8746411B2 (en) | Elevator car positioning including gain adjustment based upon whether a vibration damper is activated | |
| JP5009304B2 (ja) | エレベータ装置 | |
| JP4266744B2 (ja) | エレベータの案内装置 | |
| JPH0388687A (ja) | エレベーター装置 | |
| CN103003182A (zh) | 具有绳索摇摆检测的电梯系统 | |
| EP1460021A1 (en) | Elevator device | |
| JP2865949B2 (ja) | エレベータの制振装置 | |
| JP2012101899A (ja) | エレベーター装置 | |
| CN103547525A (zh) | 电梯 | |
| JP6399404B2 (ja) | エレベータ用のかご横揺れ抑制装置及びかご横揺れ抑制方法 | |
| JP5071978B2 (ja) | エレベータ制振装置 | |
| JP2008013309A (ja) | エレベータのガバナ装置のテンショナ | |
| JP4810539B2 (ja) | エレベータの振動低減装置 | |
| JP6527036B2 (ja) | エレベータ及びエレベータの制振方法 | |
| JP3214050B2 (ja) | エレベーターの制振装置 | |
| JP6569970B2 (ja) | エレベータ用のかご横揺れ抑制装置 | |
| KR20140060694A (ko) | 엘리베이터의 횡진동 제어를 위한 능동마찰댐퍼 | |
| WO2019077645A1 (ja) | エレベータの制御装置及び制御方法 | |
| JP2001213580A (ja) | 加速緩和システム、エレベータシステムおよびエレベータかご室フロアシステム | |
| JP2016169578A (ja) | 振動制御構造 | |
| JP2019006580A (ja) | エレベータ | |
| JP2006315796A (ja) | マルチカーエレベータ装置 | |
| JP2005231867A (ja) | エレベータの制振装置 | |
| KR20150002620U (ko) | 케이지의 횡진동 억제를 위한 하이브리드 방진고무 | |
| JPH061571A (ja) | エレベーターかごの制振装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180116 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20181122 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20181204 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190115 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190507 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190509 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6527036 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |