本発明を実施するための形態(実施形態)につき、図面を参照しつつ詳細に説明する。以下の実施形態に記載した内容により本発明が限定されるものではない。また、以下に記載した構成要素には、当業者が容易に想定できるもの、実質的に同一のものが含まれる。さらに、以下に記載した構成要素は適宜組み合わせることが可能である。
(実施形態)
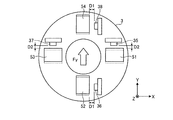
図1は、本実施形態に係る力覚センサを示す斜視図である。力覚センサ1は、加えられた外力を検出することができる装置である。力覚センサ1は、例えば産業用ロボットのアームの先端にあるハンドに取り付けられ、ハンドに作用する力を検出する。力覚センサ1が検出した力は、産業用ロボットを駆動するモータ等の制御に用いられる。具体的には、力覚センサ1は、加えられた外力の大きさおよび方向を検出し、加えられた外力の大きさおよび方向に応じた制御信号を、モータ等を制御する制御部に送ることができる。図1に示すように、力覚センサ1は、支持体2と、弾性体4と、第1基板3と、第2基板5と、天板6と、を備える。
図2は、本実施形態に係る力覚センサの分解図である。支持体2は、円盤状の部材であって、アルミニウム等の金属で形成されている。支持体2は、産業用ロボットのアームの先端にあるハンドに固定される。また、支持体2の中央部には孔が設けられている。以下の説明において、支持体2に対して直交するZ軸と、Z軸に対して直交するX軸、Z軸およびX軸に対して直交するY軸と、からなる直交座標系が用いられる。
図2に示すように、弾性体4は、例えば円盤状の部材であって、アルミニウム等の金属で形成されている。弾性体4は、支持体2に固定されている。より具体的には、弾性体4の一方の端面が支持体2に固定されている。弾性体4の中央部には、Z軸方向で支持体2の孔に重なる孔40が設けられている。また、弾性体4は、Z軸を中心とした螺旋状のスリット41を備える。言い換えると、弾性体4の形状はコイルバネ状である。弾性体4に外力が作用すると、弾性体4の支持体2に固定された一方の端面には変位が生じず、他方の端面に変位が生じる。例えば、弾性体4にX軸方向の力が作用すれば他方の端面がX軸方向に移動する。弾性体4にY軸方向の力が作用すれば他方の端面がY軸方向に移動する。弾性体4にZ軸方向の力が作用すれば他方の端面がZ軸方向に移動する。また、弾性体4にX軸廻りのモーメントが作用すれば他方の端面がX軸廻りに傾斜する。弾性体4にY軸廻りのモーメントが作用すれば他方の端面がY軸廻りに傾斜する。弾性体4にZ軸廻りのモーメントが作用すれば他方の端面がZ軸廻りに傾斜する。
図2に示すように、第1基板3は、例えば円盤状の部材であって、樹脂で形成されたプリント基板である。第1基板3は、支持体2に固定されている。第1基板3の中央部には孔30が設けられており、弾性体4が孔30を貫通している。第1基板3は支持体2に固定されているので、弾性体4に外力が作用するとき第1基板3には変位が生じない。
図2及び図3に示すように、第2基板5は、例えば円盤状の部材であって、アルミニウム等の金属で形成されている。第2基板5は、弾性体4に固定されている。より具体的には、弾性体4の支持体2に固定された端部とは反対側の端部が第2基板5に設けられた凹部59に嵌合した状態で、第2基板5が弾性体4に固定されている。第2基板5は、第1基板3とZ軸方向に対向している。第2基板5の中央部には、Z軸方向で弾性体4の孔40に重なる孔50が設けられている。図3に示すように、第2基板5は、第1突起51と、第2突起52と、第3突起53と、第4突起54と、凸部55と、を備える。第1突起51、第2突起52、第3突起53及び第4突起54は、第2基板5から第1基板3に向かって突出する部材であって、例えばZ軸方向から見て周方向に等間隔に並べられている。例えば、第1突起51、第2突起52、第3突起53及び第4突起54の形状は互いに同じであって、略直方体状である。凸部55は、第2基板5から第1基板3とは反対側に突出する部材であって、例えばZ軸方向から見て円環状である。以下の説明において、Z軸方向のうち第1基板3から第2基板5に向かう方向を+Z方向とし、+Z方向とは反対方向を−Z方向とする。
図2に示すように、天板6は、例えば円盤状の部材であって、アルミニウム等の金属で形成されている。天板6は、第2基板5に固定されている。より具体的には、天板6に設けられた凹部に凸部55が嵌合した状態で、天板6が第2基板5に固定されている。天板6の中央部には、Z軸方向で第2基板5の孔50に重なる孔60が設けられている。例えば、天板6の外径は、第2基板5の外径よりも大きく且つ支持体2の外径に略等しい。天板6に外力が作用すると、天板6及び第2基板5は弾性体4の変形に伴って一体に移動する。
図4は、本実施形態に係る第1基板を示す平面図である。図5は、図4におけるA矢視図を示す。図6は、本実施形態に係るセンサ及び突起を示す模式平面図である。図7は、図6におけるB矢視図を示す。図8は、図6におけるC矢視図を示す。図4及び図5に示すように、第1基板3には第1センサ31、第2センサ32、第3センサ33、第4センサ34、第5センサ35、第6センサ36、第7センサ37及び第8センサ38が設けられている。第1センサ31、第2センサ32、第3センサ33、第4センサ34、第5センサ35、第6センサ36、第7センサ37及び第8センサ38は、例えばフォトリフレクタであって、発光部としての発光ダイオード及び受光部としてのフォトトランジスタを備える。発光部が照射した光の反射光が受光部に入射し、受光部に入射した反射光強度に応じて受光部から出力されるセンサ出力(電圧)が変化する。また、第1センサ31、第2センサ32、第3センサ33、第4センサ34、第5センサ35、第6センサ36、第7センサ37及び第8センサ38の電子部品は、第1基板3の表面に搭載されている。これにより、力覚センサ1が小型化する。
図4に示すように、第1センサ31、第2センサ32、第3センサ33及び第4センサ34は、例えばZ軸方向から見て弾性体4を中心とした周方向で等間隔に配置されている。また、第3センサ33は、Z軸方向から見て、弾性体4の中心を通り且つY軸方向に沿った直線L1を対称軸として第1センサ31に対して線対称に配置されている。第4センサ34は、Z軸方向から見て、弾性体4の中心を通り且つX軸方向に沿った直線L2を対称軸として第2センサ32に対して線対称に配置されている。
図6から図8に示すように、第1センサ31はZ軸方向で第1突起51に対向し、第2センサ32はZ軸方向で第2突起52に対向し、第3センサ33はZ軸方向で第3突起53に対向し、第4センサ34はZ軸方向で第4突起54に対向している。第1センサ31、第2センサ32、第3センサ33及び第4センサ34の発光部は、+Z方向に光を照射する。第1センサ31の発光部が照射した光は、第1突起51で反射し、第1センサ31の受光部に入射する。第2センサ32の発光部が照射した光は、第2突起52で反射し、第2センサ32の受光部に入射する。第3センサ33の発光部が照射した光は、第3突起53で反射し、第3センサ33の受光部に入射する。第4センサ34の発光部が照射した光は、第4突起54で反射し、第4センサ34の受光部に入射する。天板6に外力が作用していないとき(弾性体4が変形していないとき)、第1センサ31から第1突起51までの距離、第2センサ32から第2突起52までの距離、第3センサ33から第3突起53までの距離、及び第4センサ34から第4突起54までの距離は、図7及び図8に示すように距離H1であって、互いに等しい。
以下の説明において、X軸方向のうち第3センサ33から第1センサ31に向かう方向を+X方向とし、+X方向とは反対方向を−X方向とする。Y軸方向のうち第2センサ32から第4センサ34に向かう方向を+Y方向とし、+Y方向とは反対方向を−Y方向とする。
図6に示すように、第5センサ35は、第1センサ31の+Y方向側に配置されている。第6センサ36は、第2センサ32の+X方向側に配置されている。第7センサ37は、第3センサ33の+Y方向側に配置されている。第8センサ38は、第4センサ34の+X方向側に配置されている。また、図4に示すように、第7センサ37は、Z軸方向から見て直線L1を対称軸として第5センサ35に対して線対称に配置されている。第8センサ38は、Z軸方向から見て、直線L2を対称軸として第6センサ36に対して線対称に配置されている。
図6に示すように、第5センサ35は、Y軸方向で第1突起51に対向している。第5センサ35の発光部は、−Y方向に光を照射する。第5センサ35の発光部が照射した光は、第1突起51で反射し、第5センサ35の受光部に入射する。第6センサ36は、X軸方向で第2突起52に対向している。第6センサ36の発光部は、−X方向に光を照射する。第6センサ36の発光部が照射した光は、第2突起52で反射し、第6センサ36の受光部に入射する。第7センサ37は、Y軸方向で第3突起53に対向している。第7センサ37の発光部は、−Y方向に光を照射する。第7センサ37の発光部が照射した光は、第3突起53で反射し、第7センサ37の受光部に入射する。第8センサ38は、X軸方向で第4突起54に対向している。第8センサ38の発光部は、−X方向に光を照射する。第8センサ38の発光部が照射した光は、第4突起54で反射し、第8センサ38の受光部に入射する。天板6に外力が作用していないとき(弾性体4が変形していないとき)、第5センサ35から第1突起51までの距離、第6センサ36から第2突起52までの距離、第7センサ37から第3突起53までの距離、及び第8センサ38から第4突起54までの距離は、図6に示すように距離D1であって、互いに等しい。
図9は、本実施形態に係る上板にX軸方向の力が加えられた状態における突起の変位を示す模式図である。図10は、本実施形態に係る上板にY軸方向の力が加えられた状態における突起の変位を示す模式図である。図11は、本実施形態に係る上板にZ軸方向の力が加えられた状態における突起の変位を示す模式図である。図12は、本実施形態に係る上板にX軸廻りのモーメントが加えられた状態における突起の変位を示す模式図である。図13は、本実施形態に係る上板にY軸廻りのモーメントが加えられた状態における突起の変位を示す模式図である。図14は、本実施形態に係る上板にZ軸廻りのモーメントが加えられた状態における突起の変位を示す模式図である。以下の説明において、天板6に外力が作用していない状態、すなわち図6から図8に示した状態は、単に基準状態と記載される。なお、図9から図14における破線は、天板6に外力が作用していないときの第1突起51、第2突起52、第3突起53及び第4突起54の位置を示す。また、図9に示す力Fxの大きさは図10に示す力Fyの大きさに等しい。図12に示すモーメントMxの大きさは図13に示すモーメントMyの大きさに等しい。
図9に示すように、天板6に+X方向に力Fxが作用すると、弾性体4の変形に伴って第1突起51、第2突起52、第3突起53及び第4突起54は+X方向に移動する。これにより、第6センサ36から第2突起52までの距離、及び第8センサ38から第4突起54までの距離は、図9に示すように距離D2となり、互いに等しい。距離D2は距離D1(図6参照)よりも小さい。これにより、第6センサ36及び第8センサ38に入射する反射光強度が大きくなる。このため、第6センサ36及び第8センサ38のセンサ出力が、基準状態に比較して大きくなる。一方、第5センサ35から第1突起51までの距離、及び第7センサ37から第3突起53までの距離は、距離D1のままである。第1センサ31から第1突起51までの距離、第2センサ32から第2突起52までの距離、第3センサ33から第3突起53までの距離、及び第4センサ34から第4突起54までの距離は、距離H1(図7及び図8参照)のままである。このため、第1センサ31、第2センサ32、第3センサ33、第4センサ34、第5センサ35及び第7センサ37のセンサ出力は、基準状態と同じである。また、天板6に−X方向に力Fxが作用すると、上述した説明とは逆に、第6センサ36及び第8センサ38のセンサ出力が基準状態に比較して小さくなる。
図10に示すように、天板6に+Y方向に力Fyが作用すると、弾性体4の変形に伴って第1突起51、第2突起52、第3突起53及び第4突起54は+Y方向に移動する。これにより、第5センサ35から第1突起51までの距離、及び第7センサ37から第3突起53までの距離は、図10に示すように距離D2となり、互いに等しい。距離D2は距離D1(図6参照)よりも小さい。これにより、第5センサ35及び第7センサ37に入射する反射光強度が大きくなる。このため、第5センサ35及び第7センサ37のセンサ出力が、基準状態に比較して大きくなる。一方、第6センサ36から第2突起52までの距離、及び第8センサ38から第4突起54までの距離は、距離D1のままである。第1センサ31から第1突起51までの距離、第2センサ32から第2突起52までの距離、第3センサ33から第3突起53までの距離、及び第4センサ34から第4突起54までの距離は、距離H1(図7及び図8参照)のままである。このため、第1センサ31、第2センサ32、第3センサ33、第4センサ34、第6センサ36及び第8センサ38のセンサ出力は、基準状態と同じである。また、天板6に−Y方向に力Fyが作用すると、上述した説明とは逆に、第5センサ35及び第7センサ37のセンサ出力が基準状態に比較して小さくなる。
図11に示すように、天板6に−Z方向に力Fzが作用すると、弾性体4の変形に伴って第1突起51、第2突起52、第3突起53及び第4突起54は−Z方向に移動する。これにより、第1センサ31から第1突起51までの距離、第2センサ32から第2突起52までの距離、第3センサ33から第3突起53までの距離、及び第4センサ34から第4突起54までの距離は、距離H2となり、互いに等しい。距離H2は距離H1(図7及び図8参照)よりも小さい。これにより、第1センサ31、第2センサ32、第3センサ33及び第4センサ34に入射する反射光強度が大きくなる。このため、第1センサ31、第2センサ32、第3センサ33及び第4センサ34のセンサ出力が、基準状態に比較して大きくなる。一方、第5センサ35から第1突起51までの距離、第6センサ36から第2突起52までの距離、第7センサ37から第3突起53までの距離、及び第8センサ38から第4突起54までの距離は、距離D1(図6参照)のままである。このため、第5センサ35、第6センサ36、第7センサ37、第8センサ38のセンサ出力は、基準状態と同じである。また、天板6に+Z方向に力Fzが作用すると、上述した説明とは逆に、第1センサ31、第2センサ32、第3センサ33及び第4センサ34のセンサ出力が基準状態に比較して小さくなる。
図12に示すように、天板6にX軸廻りにモーメントMxが作用すると、弾性体4の変形に伴って第2突起52が−Z方向に移動し、第4突起54が+Z方向に移動する。これにより、第2センサ32から第2突起52までの距離が距離H3となり、第4センサ34から第4突起54までの距離が距離H4となる。距離H3は距離H1(図7及び図8参照)よりも小さい。距離H4は距離H1よりも大きい。これにより、第2センサ32に入射する反射光強度が大きくなるので、第2センサ32のセンサ出力が基準状態に比較して大きくなる。第4センサ34に入射する反射光強度が小さくなるので、第4センサ34のセンサ出力が基準状態に比較して小さくなる。一方、第1センサ31から第1突起51までの距離、及び第3センサ33から第3突起53までの距離は、距離H1のままである。第5センサ35から第1突起51までの距離、第6センサ36から第2突起52までの距離、第7センサ37から第3突起53までの距離、及び第8センサ38から第4突起54までの距離は、距離D1(図6参照)のままである。このため、第1センサ31、第3センサ33、第5センサ35、第6センサ36、第7センサ37、第8センサ38のセンサ出力は、基準状態と同じである。また、天板6に図12に示した方向とは逆向きのモーメントMxが作用すると、上述した説明とは逆に、第2センサ32のセンサ出力が基準状態に比較して小さくなり、且つ第4センサ34のセンサ出力が基準状態に比較して大きくなる。
図13に示すように、天板6にY軸廻りにモーメントMyが作用すると、弾性体4の変形に伴って第3突起53が−Z方向に移動し、第1突起51が+Z方向に移動する。これにより、第3センサ33から第3突起53までの距離が距離H3となり、第1センサ31から第1突起51までの距離が距離H4となる。距離H3は距離H1(図7及び図8参照)よりも小さい。距離H4は距離H1よりも大きい。これにより、第3センサ33に入射する反射光強度が大きくなるので、第3センサ33のセンサ出力が基準状態に比較して大きくなる。第1センサ31に入射する反射光強度が小さくなるので、第1センサ31のセンサ出力が基準状態に比較して小さくなる。一方、第2センサ32から第2突起52までの距離、及び第4センサ34から第4突起54までの距離は、距離H1のままである。第5センサ35から第1突起51までの距離、第6センサ36から第2突起52までの距離、第7センサ37から第3突起53までの距離、及び第8センサ38から第4突起54までの距離は、距離D1(図6参照)のままである。このため、第2センサ32、第4センサ34、第5センサ35、第6センサ36、第7センサ37、第8センサ38のセンサ出力は、基準状態と同じである。また、天板6に図13に示した方向とは逆向きのモーメントMyが作用すると、上述した説明とは逆に、第3センサ33のセンサ出力が基準状態に比較して小さくなり、且つ第1センサ31のセンサ出力が基準状態に比較して大きくなる。
図14に示すように、天板6にZ軸廻りにモーメントMzが作用すると、弾性体4の変形に伴って第1突起51が+Y方向に移動し、第2突起52が+X方向に移動し、第3突起53が−Y方向に移動し、第4突起54が−X方向に移動する。これにより、第5センサ35から第1突起51までの距離及び第6センサ36から第2突起52までの距離が距離D3となり、第7センサ37から第3突起53までの距離及び第8センサ38から第4突起54までの距離が距離D4となる。距離D3は距離D1(図6参照)よりも小さい。距離D4は距離D1よりも大きい。これにより、第5センサ35及び第6センサ36に入射する反射光強度が大きくなるので、第5センサ35及び第6センサ36のセンサ出力が基準状態に比較して大きくなる。第7センサ37及び第8センサ38に入射する反射光強度が小さくなるので、第7センサ37及び第8センサ38のセンサ出力が基準状態に比較して小さくなる。一方、第1センサ31から第1突起51までの距離、第2センサ32から第2突起52までの距離、第3センサ33から第3突起53までの距離、及び第4センサ34から第4突起54までの距離は、距離H1(図7及び図8参照)のままである。このため、第1センサ31、第2センサ32、第3センサ33及び第4センサ34のセンサ出力は、基準状態と同じである。また、天板6に図14に示した方向とは逆向きのモーメントMzが作用すると、上述した説明とは逆に、第5センサ35及び第6センサ36のセンサ出力が基準状態に比較して小さくなり、第7センサ37及び第8センサ38のセンサ出力が基準状態に比較して大きくなる。
図15は、本実施形態に係る演算処理部を示すブロック図である。図16は、本実施形態に係る演算処理部を示す構成図である。図15に示すように、力覚センサ1は演算処理部9を備える。力覚センサ1は、第1センサ31、第2センサ32、第3センサ33、第4センサ34、第5センサ35、第6センサ36、第7センサ37及び第8センサ38の各センサ出力を受信する。そして、力覚センサ1は、各センサ出力に基づいて天板6に作用している外力を演算し、外力の情報を制御部100に送信する。制御部100は、例えば産業用ロボットを駆動するモータを制御する。
図16に示すように、演算処理部9は、マイクロコンピュータ(マイコン)等のコンピュータであり、入力インターフェース9aと、出力インターフェース9bと、CPU(Central Processing Unit)9cと、ROM(Read Only Memory)9dと、RAM(Random Access Memory)9eと、内部記憶装置9fと、を含んでいる。入力インターフェース9a、出力インターフェース9b、CPU9c、ROM9d、RAM9eおよび内部記憶装置9fは、内部バスに接続されている。
入力インターフェース9aは、第1センサ31、第2センサ32、第3センサ33、第4センサ34、第5センサ35、第6センサ36、第7センサ37及び第8センサ38からの各センサ出力を受信し、CPU9cに出力する。出力インターフェース9bは、CPU9cから外力の情報を受け取り、制御部100に出力する。
ROM9dには、BIOS(Basic Input/Output System)等のプログラムが記憶されている。内部記憶装置9fは、例えばHDD(Hard Disk Drive)やフラッシュメモリ等であり、オペレーティングシステムプログラムやアプリケーションプログラムを記憶している。CPU9cは、RAM9eをワークエリアとして使用しながらROM9dや内部記憶装置9fに記憶されているプログラムを実行することにより、種々の機能を実現する。
内部記憶装置9fは、各センサ出力に基づいて外力を求めるための係数を記憶している。係数は、第1センサ31、第2センサ32、第3センサ33、第4センサ34、第5センサ35、第6センサ36、第7センサ37及び第8センサ38の特性によって定まる定数である。
図15に示すように、演算処理部9は、AD変換部901と、AD変換部902と、AD変換部903と、AD変換部904と、AD変換部905と、AD変換部906と、AD変換部907と、AD変換部908と、加算部91と、減算部92と、減算部93と、加算部94と、加算部95と、加算部96と、加算部97と、減算部98と、Fz演算部991と、Mx演算部992と、My演算部993と、Fx演算部994と、Fy演算部995と、Mz演算部996と、を備える。演算処理部9内で行われる各処理は、入力インターフェース9a、出力インターフェース9b、CPU9c、ROM9d、RAM9e及び内部記憶装置9fの組み合わせにより実現される。
AD変換部901は、第1センサ31のアナログデータとしてのセンサ出力S1aを受信し、センサ出力S1aをデジタルデータとしてのセンサ出力S1に変換する。AD変換部901は、センサ出力S1を加算部91及び減算部93に出力する。
AD変換部902は、第2センサ32のアナログデータとしてのセンサ出力S2aを受信し、センサ出力S2aをデジタルデータとしてのセンサ出力S2に変換する。AD変換部902は、センサ出力S2を加算部91及び減算部92に出力する。
AD変換部903は、第3センサ33のアナログデータとしてのセンサ出力S3aを受信し、センサ出力S3aをデジタルデータとしてのセンサ出力S3に変換する。AD変換部903は、センサ出力S3を加算部91及び減算部93に出力する。
AD変換部904は、第4センサ34のアナログデータとしてのセンサ出力S4aを受信し、センサ出力S4aをデジタルデータとしてのセンサ出力S4に変換する。AD変換部904は、センサ出力S4を加算部91及び減算部92に出力する。
AD変換部905は、第5センサ35のアナログデータとしてのセンサ出力S5aを受信し、センサ出力S5aをデジタルデータとしてのセンサ出力S5に変換する。AD変換部905は、センサ出力S5を加算部95及び加算部96に出力する。
AD変換部906は、第6センサ36のアナログデータとしてのセンサ出力S6aを受信し、センサ出力S6aをデジタルデータとしてのセンサ出力S6に変換する。AD変換部906は、センサ出力S6を加算部94及び加算部96に出力する。
AD変換部907は、第7センサ37のアナログデータとしてのセンサ出力S7aを受信し、センサ出力S7aをデジタルデータとしてのセンサ出力S7に変換する。AD変換部907は、センサ出力S7を加算部95及び加算部97に出力する。
AD変換部908は、第8センサ38のアナログデータとしてのセンサ出力S8aを受信し、センサ出力S8aをデジタルデータとしてのセンサ出力S8に変換する。AD変換部908は、センサ出力S8を加算部94及び加算部97に出力する。
以下の説明においては、基準状態におけるセンサ出力S1、センサ出力S2、センサ出力S3、センサ出力S4、センサ出力S5、センサ出力S6、センサ出力S7及びセンサ出力S8の値を0と仮定する。天板6に外力が作用している状態におけるセンサ出力S1、センサ出力S2、センサ出力S3、センサ出力S4、センサ出力S5、センサ出力S6、センサ出力S7及びセンサ出力S8の値を、それぞれs1、s2、s3、s4、s5、s6、s7、s8とする。
加算部91は、センサ出力S1、センサ出力S2、センサ出力S3及びセンサ出力S4の和を演算する。すなわち、加算部91は、(s1+s2+s3+s4)を演算する。加算部91は、演算結果であるセンサ出力和S91をFz演算部991に出力する。
Fz演算部991は、センサ出力和S91に基づいて力Fzを演算する。力Fzの値をfzとし、センサ出力和S91を力Fzに変換するための係数をαとすると、Fz演算部991は下記(1)式の演算を行う。αは事前の実験等によって求められた定数である。そして、Fz演算部991は、演算結果である力Fzを制御部100に出力する。
fz=α×(s1+s2+s3+s4) ・・・(1)
減算部92は、センサ出力S2及びセンサ出力S4の差を演算する。すなわち、減算部92は、(s2−s4)を演算する。減算部92は、演算結果であるセンサ出力差S92をMx演算部992に出力する。
Mx演算部992は、センサ出力差S92に基づいてモーメントMxを演算する。モーメントMxの値をmxとし、センサ出力差S92をモーメントMxに変換するための係数をβとすると、Mx演算部992は下記(2)式の演算を行う。βは事前の実験等によって求められた定数である。そして、Mx演算部992は、演算結果であるモーメントMxを制御部100に出力する。
mx=β×(s2−s4) ・・・(2)
減算部93は、センサ出力S1及びセンサ出力S3の差を演算する。すなわち、減算部93は、(s1−s3)を演算する。減算部93は、演算結果であるセンサ出力差S93をMy演算部993に出力する。
My演算部993は、センサ出力差S93に基づいてモーメントMyを演算する。モーメントMyの値をmyとし、センサ出力差S93をモーメントMyに変換するための係数をγとすると、My演算部993は下記(3)式の演算を行う。γは事前の実験等によって求められた定数である。そして、My演算部993は、演算結果であるモーメントMyを制御部100に出力する。
my=γ×(s1−s3) ・・・(3)
加算部94は、センサ出力S6及びセンサ出力S8の和を演算する。すなわち、加算部94は、(s6+s8)を演算する。加算部94は、演算結果であるセンサ出力和S94をFx演算部994に出力する。
Fx演算部994は、センサ出力和S94に基づいて力Fxを演算する。力Fxの値をfxとし、センサ出力和S94を力Fxに変換するための係数をδとすると、Fx演算部994は下記(4)式の演算を行う。δは事前の実験等によって求められた定数である。そして、Fx演算部994は、演算結果である力Fxを制御部100に出力する。
fx=δ×(s6+s8) ・・・(4)
加算部95は、センサ出力S5及びセンサ出力S7の和を演算する。すなわち、加算部95は、(s5+s7)を演算する。加算部95は、演算結果であるセンサ出力和S95をFy演算部995に出力する。
Fy演算部995は、センサ出力和S95に基づいて力Fyを演算する。力Fyの値をfyとし、センサ出力和S95を力Fyに変換するための係数をεとすると、Fy演算部995は下記(5)式の演算を行う。εは事前の実験等によって求められた定数である。そして、Fy演算部995は、演算結果である力Fyを制御部100に出力する。
fy=ε×(s5+s7) ・・・(5)
加算部96は、センサ出力S5及びセンサ出力S6の和を演算する。すなわち、加算部96は、(s5+s6)を演算する。加算部96は、演算結果であるセンサ出力和S96を減算部98に出力する。
加算部97は、センサ出力S7及びセンサ出力S8の和を演算する。すなわち、加算部97は、(s7+s8)を演算する。加算部97は、演算結果であるセンサ出力和S97を減算部98に出力する。
減算部98は、センサ出力和S96及びセンサ出力和S97の差を演算する。すなわち、減算部98は、{(s5+s6)−(s7+s8)}を演算する。減算部98は、演算結果であるセンサ出力差S98をMz演算部996に出力する。
Mz演算部996は、センサ出力差S98に基づいてモーメントMzを演算する。モーメントMzの値をmzとし、センサ出力差S98をモーメントMzに変換するための係数をζとすると、Mz演算部996は下記(6)式の演算を行う。ζは事前の実験等によって求められた定数である。そして、Mz演算部996は、演算結果であるモーメントMzを制御部100に出力する。
mz=ζ×{(s5+s6)−(s7+s8)} ・・・(6)
上述したように、力覚センサ1は、第1センサ31、第2センサ32、第3センサ33及び第4センサ34のセンサ出力の変化に基づいて、Z軸方向の力Fzを検出できる。力覚センサ1は、第2センサ32及び第4センサ34のセンサ出力の変化に基づいて、X軸廻りのモーメントMxを検出できる。力覚センサ1は、第1センサ31及び第3センサ33のセンサ出力の変化に基づいて、Y軸廻りのモーメントMyを検出できる。力覚センサ1は、第6センサ36及び第8センサ38のセンサ出力の変化に基づいて、X軸方向の力Fxを検出できる。力覚センサ1は、第5センサ35及び第7センサ37のセンサ出力の変化に基づいて、Y軸方向の力Fyを検出できる。力覚センサ1は、第5センサ35、第6センサ36、第7センサ37及び第8センサ38のセンサ出力の変化に基づいて、Z軸廻りのモーメントMzを検出できる。すなわち、力覚センサ1は6つの外力を検出できる。
制御部100は、演算処理部9から受信した力Fz、モーメントMx、モーメントMy、力Fx、力Fy及びモーメントMzに基づいてモータを制御する。具体的には、制御部100は、モータの回転方向及び回転数を制御する。
なお、支持体2、第1基板3、弾性体4、第2基板5及び天板6のZ軸方向から見た形状は必ずしも円形でなくてもよく、例えば楕円又は多角形等であってもよい。また、第1突起51、第2突起52、第3突起53及び第4突起54の形状は、必ずしも直方体状でなくてもよく、例えば多角柱等であってもよい。
なお、第1センサ31、第2センサ32、第3センサ33、第4センサ34、第5センサ35、第6センサ36、第7センサ37及び第8センサ38の位置は、上述した位置からずれていてもよい。また、少なくとも第1センサ31、第2センサ32、第3センサ33、第4センサ34、第5センサ35、第6センサ36、第7センサ37及び第8センサ38が設けられていればよく、他にセンサが設けられてもよい。
なお、上述した説明では、基準状態における各センサ出力を0としたが、基準状態における各センサ出力は実際には0とは限らない。例えば、基準状態におけるセンサ出力S1、センサ出力S2、センサ出力S3、センサ出力S4、センサ出力S5、センサ出力S6、センサ出力S7及びセンサ出力S8の値がそれぞれs10、s20、s30、s40、s50、s60、s70、s80であると仮定する。そして、天板6に外力が作用すると各センサ出力がそれぞれs11、s21、s31、s41、s51、s61、s71、s81に変化すると仮定する。このような場合、上述した(1)式から(6)式においてs1に(s11−s10)を代入し、s2に(s21−s20)を代入し、s3に(s31−s30)を代入し、s4に(s41−s40)を代入し、s5に(s51−s50)を代入し、s6に(s61−s60)を代入し、s7に(s71−s70)を代入し、s8に(s81−s80)を代入すればよい。
以上で説明したように、力覚センサ1は、支持体2と、支持体2に支持される第1基板3と、一端が支持体2に支持され且つ他端が移動可能な弾性体4と、弾性体4に支持されており、第1基板3に対向する第2基板5と、を備える。力覚センサ1は、第1基板3に設けられた第1センサ31、第2センサ32、第3センサ33、第4センサ34、第5センサ35、第6センサ36、第7センサ37及び第8センサ38を備える。力覚センサ1は、第2基板5に設けられており第1基板3に向かって突出する第1突起51、第2突起52、第3突起53及び第4突起54を備える。第1基板3に対して直交するZ軸方向で、第1センサ31が第1突起51に対向しており、第2センサ32が第2突起52に対向しており、第3センサ33が第3突起53に対向しており、第4センサ34が第4突起54に対向している。Z軸方向に対して直交するY軸方向で、第5センサ35が第1突起51に対向しており、第7センサ37が第3突起53に対向している。Z軸方向及びY軸方向に対して直交するX軸方向で、第6センサ36が第2突起52に対向しており、第8センサ38が第4突起54に対向している。
これにより、力覚センサ1は、第1センサ31、第2センサ32、第3センサ33、第4センサ34、第5センサ35、第6センサ36、第7センサ37及び第8センサ38の各センサ出力の変化に基づいて、6つの外力(力Fx、力Fy、力Fz、モーメントMx、モーメントMy、モーメントMz)を検出できる。さらに、6つの外力のそれぞれは、各センサ出力の変化分の加算又は減算によって求められる。このため、6つの外力を求めるための演算処理が容易である。したがって、力覚センサ1は、検出の応答性を向上させることができ且つ6つの外力を検出できる。
さらに、上述した特許文献1の技術に比較して、力覚センサ1においては第2基板5の+Z方向側にセンサが配置されないので、Z軸方向の厚みが小さくなりやすい。このため、力覚センサ1は、特許文献1の技術よりも容易に小型化することができる。
また、力覚センサ1において、第1センサ31、第2センサ32、第3センサ33及び第4センサ34は、Z軸方向から見て、弾性体4を中心とした周方向で等間隔に配置されている。
これにより、X軸廻りのモーメントMx又はY軸廻りのモーメントMyが作用したとき、第1センサ31、第2センサ32、第3センサ33及び第4センサ34の各センサ出力のうちの2つのセンサ出力が変化する一方、残り2つのセンサ出力は変化しない。このため、力覚センサ1は、2つのセンサ出力の変化に基づいてモーメントMxを検出でき、残りの2つのセンサ出力の変化に基づいてモーメントMyを検出できる。したがって、モーメントMx及びモーメントMyを求めるための演算が容易である。
また、力覚センサ1において、弾性体4は、Z軸方向に沿った軸を中心とした螺旋状のスリット41を備える。
これにより、弾性体4において、X軸方向、Y軸方向及びZ軸方向への変位が生じやすくなり、且つX軸廻り、Y軸廻り及びZ軸廻りの傾斜が生じやすくなる。このため、第1センサ31、第2センサ32、第3センサ33、第4センサ34、第5センサ35、第6センサ36、第7センサ37及び第8センサ38の各センサ出力の変化分が大きくなる。したがって、力覚センサ1の検出精度が向上する。