JP2017104002A - モータ組立体、集積回路、及び応用機器 - Google Patents
モータ組立体、集積回路、及び応用機器 Download PDFInfo
- Publication number
- JP2017104002A JP2017104002A JP2016155511A JP2016155511A JP2017104002A JP 2017104002 A JP2017104002 A JP 2017104002A JP 2016155511 A JP2016155511 A JP 2016155511A JP 2016155511 A JP2016155511 A JP 2016155511A JP 2017104002 A JP2017104002 A JP 2017104002A
- Authority
- JP
- Japan
- Prior art keywords
- terminal
- current
- circuit
- switching transistor
- motor assembly
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images









Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/20—Arrangements for starting
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B7/00—Measuring arrangements characterised by the use of electric or magnetic techniques
- G01B7/003—Measuring arrangements characterised by the use of electric or magnetic techniques for measuring position, not involving coordinate determination
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/14—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage
- G01D5/142—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage using Hall-effect devices
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/0011—Arrangements or instruments for measuring magnetic variables comprising means, e.g. flux concentrators, flux guides, for guiding or concentrating the magnetic flux, e.g. to the magnetic sensor
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/0023—Electronic aspects, e.g. circuits for stimulation, evaluation, control; Treating the measured signals; calibration
- G01R33/0029—Treating the measured signals, e.g. removing offset or noise
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/02—Measuring direction or magnitude of magnetic fields or magnetic flux
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/02—Measuring direction or magnitude of magnetic fields or magnetic flux
- G01R33/06—Measuring direction or magnitude of magnetic fields or magnetic flux using galvano-magnetic devices
- G01R33/07—Hall effect devices
- G01R33/072—Constructional adaptation of the sensor to specific applications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K11/00—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection
- H02K11/04—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection for rectification
- H02K11/049—Rectifiers associated with stationary parts, e.g. stator cores
- H02K11/05—Rectifiers associated with casings, enclosures or brackets
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K11/00—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection
- H02K11/20—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection for measuring, monitoring, testing, protecting or switching
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K11/00—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection
- H02K11/20—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection for measuring, monitoring, testing, protecting or switching
- H02K11/21—Devices for sensing speed or position, or actuated thereby
- H02K11/215—Magnetic effect devices, e.g. Hall-effect or magneto-resistive elements
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K11/00—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection
- H02K11/30—Structural association with control circuits or drive circuits
- H02K11/33—Drive circuits, e.g. power electronics
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/08—Arrangements for controlling the speed or torque of a single motor
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/14—Electronic commutators
- H02P6/16—Circuit arrangements for detecting position
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/30—Arrangements for controlling the direction of rotation
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P7/00—Arrangements for regulating or controlling the speed or torque of electric DC motors
- H02P7/03—Arrangements for regulating or controlling the speed or torque of electric DC motors for controlling the direction of rotation of DC motors
- H02P7/05—Arrangements for regulating or controlling the speed or torque of electric DC motors for controlling the direction of rotation of DC motors by means of electronic switching
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P7/00—Arrangements for regulating or controlling the speed or torque of electric DC motors
- H02P7/06—Arrangements for regulating or controlling the speed or torque of electric DC motors for regulating or controlling an individual DC dynamo-electric motor by varying field or armature current
- H02P7/18—Arrangements for regulating or controlling the speed or torque of electric DC motors for regulating or controlling an individual DC dynamo-electric motor by varying field or armature current by master control with auxiliary power
- H02P7/24—Arrangements for regulating or controlling the speed or torque of electric DC motors for regulating or controlling an individual DC dynamo-electric motor by varying field or armature current by master control with auxiliary power using discharge tubes or semiconductor devices
- H02P7/28—Arrangements for regulating or controlling the speed or torque of electric DC motors for regulating or controlling an individual DC dynamo-electric motor by varying field or armature current by master control with auxiliary power using discharge tubes or semiconductor devices using semiconductor devices
- H02P7/285—Arrangements for regulating or controlling the speed or torque of electric DC motors for regulating or controlling an individual DC dynamo-electric motor by varying field or armature current by master control with auxiliary power using discharge tubes or semiconductor devices using semiconductor devices controlling armature supply only
- H02P7/292—Arrangements for regulating or controlling the speed or torque of electric DC motors for regulating or controlling an individual DC dynamo-electric motor by varying field or armature current by master control with auxiliary power using discharge tubes or semiconductor devices using semiconductor devices controlling armature supply only using static converters, e.g. AC to DC
- H02P7/295—Arrangements for regulating or controlling the speed or torque of electric DC motors for regulating or controlling an individual DC dynamo-electric motor by varying field or armature current by master control with auxiliary power using discharge tubes or semiconductor devices using semiconductor devices controlling armature supply only using static converters, e.g. AC to DC of the kind having one thyristor or the like in series with the power supply and the motor
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10B—ELECTRONIC MEMORY DEVICES
- H10B61/00—Magnetic memory devices, e.g. magnetoresistive RAM [MRAM] devices
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N—ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N52/00—Hall-effect devices
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10W—GENERIC PACKAGES, INTERCONNECTIONS, CONNECTORS OR OTHER CONSTRUCTIONAL DETAILS OF DEVICES COVERED BY CLASS H10
- H10W70/00—Package substrates; Interposers; Redistribution layers [RDL]
- H10W70/40—Leadframes
- H10W70/464—Additional interconnections in combination with leadframes
- H10W70/465—Bumps or wires
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10W—GENERIC PACKAGES, INTERCONNECTIONS, CONNECTORS OR OTHER CONSTRUCTIONAL DETAILS OF DEVICES COVERED BY CLASS H10
- H10W72/00—Interconnections or connectors in packages
- H10W72/50—Bond wires
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P2207/00—Indexing scheme relating to controlling arrangements characterised by the type of motor
- H02P2207/05—Synchronous machines, e.g. with permanent magnets or DC excitation
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02P—CLIMATE CHANGE MITIGATION TECHNOLOGIES IN THE PRODUCTION OR PROCESSING OF GOODS
- Y02P80/00—Climate change mitigation technologies for sector-wide applications
- Y02P80/10—Efficient use of energy, e.g. using compressed air or pressurized fluid as energy carrier
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Control Of Motors That Do Not Use Commutators (AREA)
- Control Of Ac Motors In General (AREA)
- Measuring Magnetic Variables (AREA)
- Rectifiers (AREA)
- Thyristor Switches And Gates (AREA)
- Semiconductor Integrated Circuits (AREA)
- Measurement Of Length, Angles, Or The Like Using Electric Or Magnetic Means (AREA)
- Transmission And Conversion Of Sensor Element Output (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Structures Of Non-Positive Displacement Pumps (AREA)
- Brushless Motors (AREA)
- Permanent Magnet Type Synchronous Machine (AREA)
- Motor And Converter Starters (AREA)
- Control Of Electrical Variables (AREA)
- Control Of Eletrric Generators (AREA)
Abstract
【課題】回路の複雑性及びコストを低減するようになった降圧回路を提供すること。【解決手段】モータ組立体、集積回路、及びモータ組立体を含む応用機器が提供される。モータ組立体はモータ及びモータ駆動回路を含み、モータ駆動回路は降圧回路を備え、降圧回路は、選択的にオンとされる第1の電流分岐及び第2の電流分岐を含む。降圧回路は、回路の複雑性及びコストを低減するために、特定用途向け集積回路に統合することができる。【選択図】図2
Description
本開示は、モータ駆動技術の分野に関し、より具体的には、モータ組立体、集積回路、及びモータ組立体を含む応用機器に関する。
モータは、電磁誘導の法則に基づいて電気エネルギを変換又は伝達することができる。モータ駆動回路は、モータに駆動信号を供給するために必要である。モータ駆動回路は、可能な限り特定用途向け集積回路に統合して、回路の複雑性及びコストを低減することができる。一部のモータ駆動回路では、電圧低下抵抗が必要である。しかしながら、大きな電圧低下を生じることができる電圧低下抵抗は、特定用途向け集積回路に統合することができない。
モータ及びモータ駆動回路を備えるモータ組立体が提供される。モータ駆動回路は、降圧回路を含み、降圧回路は、選択的にオンとされる第1の電流分岐及び第2の電流分岐を有する。
好ましくは、第1の電流分岐及び第2の電流分岐は、反対方向の電流を流すことができる単方向電流分岐である。
好ましくは、第1の電流分岐は電力トランジスタを備え、第1の電流分岐がオンになると、電力トランジスタは増幅器モードで作動する。
好ましくは、降圧回路は、第1の端子及び第2の端子を備え、
第1の電流分岐は、第1の切換トランジスタ及び第1の抵抗を備え、第1の切換トランジスタの電流入力端子は第1の端子に電気的に接続され、第1の切換トランジスタの電流出力端子は第2の端子に電気的に接続され、第1の切換トランジスタの制御端子は第1の抵抗のある端子に電気的に接続され、第1の抵抗の別の端子は、第1の切換トランジスタの電流入力端子に電気的に接続され、
第2の分岐は、第2の切換トランジスタ及び第2の抵抗を備え、第2の切換トランジスタの電流入力端子は第2の端子に電気的に接続され、第2の切換トランジスタの電流出力端子は第1の端子に電気的に接続され、第2の切換トランジスタの制御端子は第2の抵抗のある端子に電気的に接続され、第2の抵抗の別の端子は第2の切換トランジスタの電流入力端子に電気的に接続される。
第1の電流分岐は、第1の切換トランジスタ及び第1の抵抗を備え、第1の切換トランジスタの電流入力端子は第1の端子に電気的に接続され、第1の切換トランジスタの電流出力端子は第2の端子に電気的に接続され、第1の切換トランジスタの制御端子は第1の抵抗のある端子に電気的に接続され、第1の抵抗の別の端子は、第1の切換トランジスタの電流入力端子に電気的に接続され、
第2の分岐は、第2の切換トランジスタ及び第2の抵抗を備え、第2の切換トランジスタの電流入力端子は第2の端子に電気的に接続され、第2の切換トランジスタの電流出力端子は第1の端子に電気的に接続され、第2の切換トランジスタの制御端子は第2の抵抗のある端子に電気的に接続され、第2の抵抗の別の端子は第2の切換トランジスタの電流入力端子に電気的に接続される。
好ましくは、切換トランジスタの電流入力端子と第1の電流出力端子との間の電圧降下は、第2の切換トランジスタの電流入力端子と電流出力端子との間の電圧降下と等しい。
好ましくは、モータ駆動回路は、両方共にモータと直列に接続される双方向交流スイッチ及び切換制御回路をさらに備え、切換制御回路の制御出力端子は、双方向交流スイッチの制御端子に電気的に接続される。
好ましくは、モータ駆動回路は、モータの回転子の磁界を検出して、出力磁界検出情報を切換制御回路に出力する磁界検出回路をさらに備える。
集積回路が提供される。集積回路は、ハウジングと、ハウジングの内部に配置された半導体基板と、ハウジングから外方に延びる入力ポート及び出力ポートと、半導体基板上に配置された電子回路とを備え、電子回路は、選択的にオンとされる第1の電流分岐及び第2の電流分岐を含む降圧回路を備える。
好ましくは、放熱板をハウジングに固定する。
上記いずれかの記載によるモータ組立体を備える応用機器が提供される。
本開示の実施形態において、降圧回路は、特定用途向け集積回路に統合して回路の複雑性及びコストを低減することができる。
本開示の実施形態による又は従来技術による技術的解決策がより明らかになるように、本開示の実施形態又は従来技術の説明に用いられる図面を以下のように簡単に説明する。以下の説明における図面は、本開示の幾つかの実施形態を単に例証するものであることが明らかである。当業者であれば、これらの図面からいかなる創造的作業も伴わずに他の図面を得ることができる。
本開示の実施形態による技術的解決策は、以下に本開示の実施形態における図面と併せて明確かつ完全に説明される。説明された実施形態は、本開示の実施形態の全てではなく一部あることが明らかである。本開示の実施形態に基づいて、当業者が創作的作業を行うことなく得ることができる全ての他の実施形態は、本開示の保護の範囲に属する。
図1及び図2を参照する。本開示の実施形態によるモータ組立体の構造概略図が示されている。モータ組立体は、モータ100及びモータ駆動回路200を含むことができる。具体的には、モータ駆動回路200は降圧回路10を含み、降圧回路10は、選択的にオンとされる第1の電流分岐101及び第2の電流分岐102を含む。
好ましくは、本開示の実施形態による第1の電流分岐101及び第2の電流分岐102は単方向電流分岐であり、反対方向の電流を流すことができるように構成される。図2に矢印で示すように、第1の電流分岐101の電流は左から右に流れ、第2の電流分岐102の電流は右から左に流れる。もちろん、第1の電流分岐101の電流は右から左に流れることができ、この場合、第2の電流分岐102の電流は左から右に流れることが必要であり、換言すると、第1の電流分岐101及び第2の電流分岐102の電流は反対方向に流れる。
上記の実施形態に基づいて、本開示の実施形態では、第1の電流分岐101で生じる電圧降下は、第2の電流分岐102で生じる電圧降下と等しいが、本開示は、これに限定されず、特定の状况に左右される。
好ましくは、第1の電流分岐101は、電力トランジスタを含む。第1の電流分岐101がオンになると、その電流は、電力トランジスタを第1の方向に流れ、電力トランジスタは、増幅器モードで作動可能であり、第1の電流分岐が所要の電圧降下を生じるようになっている。また、第2の電流分岐は、電力トランジスタを含む。第2の電流分岐102がオンになると、その電流は、電力トランジスタを第1の方向とは逆の第2の方向に流れ、電力トランジスタは、同様に増幅器モードで作動可能であり、第2の電流分岐が所要の電圧降下を生じるようになっている。さらに、第2の電流分岐102における電力トランジスタの電流の流れ方向は、第1の電流分岐101における電力トランジスタの電流の流れ方向とは逆方向である。
本開示の実施形態において、第1の電流分岐又は第2の電流分岐がオンになると、電力トランジスタがオンになり増幅器モードで作動し、ベース電流は非常に小さく、コレクタとエミッタとの間の等価抵抗は非常に大きいので、コレクタとエミッタとの間に非常に大きな電圧降下が生じ、所要の電圧降下がもたらされる。
図3には、本開示の実施形態による電圧低下回路10の具体的な実施構成が示される。降圧回路10は、第1の端子A及び第2の端子Bを有する。第1の電流分岐101は、第1の切換トランジスタQ1及び第1の抵抗Raを含む。第1の切換トランジスタQ1の電流入力端子(即ち、第1の切換トランジスタQ1のコレクタ)は第1の端子Aに電気的に接続され、第1の切換トランジスタQ1の電流出力端子(即ち、第1の切換トランジスタQ1のエミッタ)は第2の端子Bに電気的に接続され、第1の切換トランジスタQ1の制御端子(即ち、第1の切換トランジスタQ1のベース)は第1の抵抗Raの端子に電気的に接続され、第1の抵抗Raの他の端子は電流入力端子(即ち、降圧回路10の第1の端子A)に電気的に接続される。
第2の電流分岐102は、第2の切換トランジスタQ2及び第2の抵抗Rbを含むことができる。第2の切換トランジスタQ2の電流入力端子(即ち、第2の切換トランジスタQ2のコレクタ)は第2の端子Bに電気的に接続され、第2の切換トランジスタQ2の電流出力端子(即ち、第2の切換トランジスタQ2のエミッタ)は第1の端子Aに電気的に接続され、第2の切換トランジスタQ2の制御端子(即ち、第2の切換トランジスタQ2のベース)は、第2の抵抗Rbの端子に電気的に接続され、第2の抵抗Rbの他の端子は第2の切換トランジスタの電流入力端子(即ち、降圧回路10の第2の端子B)に電気的に接続される。
本開示の実施形態において、第1の切換トランジスタの電流入力端子と電流出力端子との間の電圧降下は、第2の切換トランジスタの電流入力端子と電流出力端子との間の電圧降下圧と等しいように設定できることに留意されたい。もちろん、第1の電流分岐の電圧降下は、回路の実際の要求に基づいて、第2の電流分岐の電圧降下とは異なるように設定することができるが、これは本開示に限定されず、特定の状况に左右される。
上記のいずれかの実施形態において、随意的に、モータ100は、図1に示すように降圧回路10に対して直列に接続される。本開示の具体的な適用例では、モータ100は。同期モータとすることができる。本開示によるモータ駆動回路200の降圧回路は、同期モータ並びに他のタイプの交流永久磁石モータに適用可能であることを理解されたい。同期モータは、固定子と、この固定子に対して回転可能な回転子とを含むことができる。固定子は、固定子鉄心と、この固定子鉄心に巻回された固定子巻線とを含むことができる。固定子鉄心は、純鉄、鋳鉄、鋳鋼、電炉鋼、ケイ素鋼のような軟磁性材料で作ることができる。回転子は永久磁石を含み、固定子巻線を交流電源に対して直列に接続する場合、回転子は、定常状態時、一定回転数の毎分60f/pで動作し、ここでfは交流電源の周波数、pは回転子の極対の数である。
上記の実施形態に基づいて、本開示の実施形態では、図5に示すように、モータ駆動回路200は、モータ100に対して直列に接続される双方向交流スイッチ20及び切換制御回路30をさらに含む。切換制御回路30の制御出力端子は、双方向交流スイッチ20の制御端子に電気的に接続され、双方向交流スイッチ20を所定の方法でオン又はオフにする。実施形態では、切換制御回路30は、マイクロコントローラによって実装することができる。
双方向交流スイッチ20は、トライアック(TRIAC)とすることができ、トライアックの2つのアノードはノードA及びノードCにそれぞれ接続され、トライアックの制御端子は切換制御回路に接続される。制御可能な双方向交流スイッチは、電流を両方向に流すことができる電子スイッチとすることができ、金属酸化膜半導体電界効果トランジスタ、シリコン制御整流器、双方向トリオードサイリスタ、絶縁ゲート双極トランジスタ、双極接合トランジスタ、サイリスタ及び光カプラのうちの1又は2以上から構成できることを理解されたい。例えば、2つの金属酸化膜型半導体電界効果トランジスタ、2つのシリコン制御整流器、2つの絶縁ゲート双極トランジスタ、及び2つの双極接合トランジスタである。
上記の実施形態に基づいて、本開示の実施形態では、図6に示すように、モータ駆動回路200は、モータ100の回転子の磁界を検出して対応する磁界検出情報を切換制御回路30に出力するための磁界検出回路40をさらに含む。
具体的には、本開示の実施形態では、磁界検出回路40は、回転子の外部磁界を検出して電気信号を出力する磁界検出素子と、電気信号を増幅して逆スクランブルする信号処理ユニットと、増幅かつ逆スクランブルされた電気信号を磁界検出情報へ変換するアナログ・デジタル変換ユニットとを含む。回転子の磁界の極性の認識のみを認識する用途では、磁界検出情報は切換式デジタル信号とすることができる。好ましくは、磁界検出素子はホールプレートとすることができる。
上記の実施形態では、切換制御回路30は、少なくとも磁界検出情報に基づいて、駆動電流が切換制御回路30の制御出力端子から双方向交流スイッチ20の制御端子に流れる第1の状態と、駆動電流が双方向交流スイッチ20の制御端子から切換制御回路30の制御出力端子に流れる第2の状態のうちの少なくとも一方で作動することができる。好ましい実施形態では、切換制御回路30は、第1の状態と第2の状態との間で切り換わることができる。本開示の実施形態では、切換制御回路30は、一方の状態が終わると直ぐに他方の状態に切り換わることに限定されず、一方の状態の終了後に一定の時間間隔でもって他方の状態に切り変わることができることに留意されたい。好ましい応用例では、2つの状態を切り換える間の時間間隔では、切換制御回路30の制御出力端子に出力が存在しない。
上記の実施形態に基づいて、本開示の実施形態では、切換制御回路30は、第1の切換トランジスタ及び第2の切換トランジスタを含むことができる。第1の切換トランジスタと制御出力端子とは第1の電流路で接続され、第2の切換トランジスタと制御出力端子とは、第1の電流路とは逆方向の第2の電流路で接続され、第1の切換トランジスタ及び第2の切換トランジスタは、磁界検出情報に基づいて選択的にオンとされる。好ましくは、第1の切換トランジスタはトリオードとすること、第2の切換トランジスタはトリオード又はダイオードにとすることができ、これは本開示に限定されず、特定の状况に左右される。
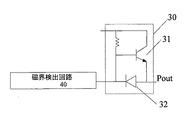
具体的には、本開示の実施形態では、図7に示すように、第1のスイッチ31及び第2のスイッチ32は、一対の相補的な半導体スイッチである。第1のスイッチ31は低レベルにてオンとなり、第2のスイッチ32は高レベルにてオンとなる。第1のスイッチ31と制御出力端子Poutとは第1の電流路で接続され、第2のスイッチ32と制御出力端子Poutとは第2の電流路で接続される。第1のスイッチ31の制御端子及び第2のスイッチ32の制御端子は、両方とも磁界検出回路40に接続される。第1のスイッチ31の電流入力端子は、高電圧(例えば直流電源)に電気的に接続され、第1のスイッチ31の電流出力端子は第2のスイッチ32の電流入力端子に電気的に接続され、第2のスイッチ32の電流出力端子は、低電圧(例えば接地)に電気的に接続される。磁界検出回路40から出力される磁界検出情報が低レベルである場合、第1のスイッチ31がオンとなり、第2のスイッチ32がオフとなり、駆動電流は、高電圧から第1のスイッチ31及び制御出力端子Poutを通って外部に流れる。磁界検出回路40から出力される磁界検出情報が高レベルである場合、第2のスイッチ32がオンとなり、第1のスイッチ31がオフとなり、駆動電流は、双方向交流スイッチ20の制御端子から制御出力端子Poutに流れ、第2のスイッチ32を通って低電圧に流れる。好ましくは、本開示の実施形態では、図7に示す実施例における第1のスイッチ31は、p型金属酸化膜半導体電界効果トランジスタ(P型MOSFET)であり、第2のスイッチ32は、n型金属酸化膜半導体電界効果トランジスタ(N型MOSFET)である。他の実施形態では、第1のスイッチ及び第2のスイッチは、接合型電界効果トランジスタ(JFET)又は金属半導体電界効果トランジスタ(MESFET)のような他のタイプの半導体スイッチとすることができ、これは本開示に限定されないことを理解されたい。
本開示の別の実施形態では、図8に示すように、第1のスイッチ31は高レベルにてオンとなるスイッチであり、第2のスイッチ32はダイオードである。第1のスイッチ31の制御端子及び第2のスイッチ32のカソードは、磁界検出回路40に電気的に接続される。第1のスイッチ31の電流入力端子は外部交流電源に接続され、第1のスイッチ31の電流出力端子及び第2のアノードは、両方とも制御出力端子Poutに電気的に接続される。第1のスイッチ31及び制御出力端子Poutは第1の電流路で接続され、制御出力端子Pout、第2のスイッチ32、及び磁界検出回路40は第2の電流路で接続される。磁界検出回路40から出力される磁界検出情報が高レベルである場合、第1のスイッチ31がオンとなり、第2のスイッチ32がオフとなり、駆動電流は、外部交流電源から流出して第1のスイッチ31及び制御出力端子Poutを通って外部に流れる。磁界検出回路40から出力される磁界検出情報が低レベルである場合、第2のスイッチ32がオンとなり、第1のスイッチ31がオフとなり、駆動電流は、双方向交流スイッチ20の制御端子から制御出力端子Poutに流れ、第2のスイッチ32を通って流れる。本開示の他の実施形態では、第1のスイッチ31及び第2のスイッチ32は他の構造とすることができ、これは本開示に限定されず、特定の状况に左右されることを理解されたい。
本開示の別の実施形態では、切換制御回路30は、駆動電流が制御出力端子Poutから外部に流れる第1の電流路と、駆動電流が制御出力端子Poutから内部に流れる第2の電流路と、第1の電流路及び第2の電流路の一方に接続されるスイッチとを含む。第1の電流路及び第2の電流路の他方にスイッチはなく、切換制御回路30は、磁界検出回路40から出力される磁界検出情報によって制御されて、第1の電流路及び第2の電流路が選択的にオンとされる。
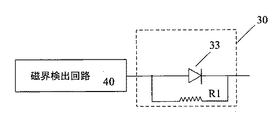
具体的な実施構成では、図9に示すように、切換制御回路30は単方向スイッチ33を含み、単方向スイッチ33と制御出力端子Poutとは第1の電流路で接続され、単方向スイッチ33の電流入力端子は、磁界検出回路40の出力端子に電気的に接続することができ、磁界検出回路40の出力端子は、抵抗R1を介して第1の電流路とは反対方向の第2の電流路の制御出力端子Poutにさらに接続することができる。単方向スイッチ33は、磁界誘導信号が高いレベルの際にオンになり、駆動電流は、単方向スイッチ33及び制御出力端子Poutを通って外部に流れる。単方向スイッチ33は、磁界誘導信号が低レベルの場合にオフとなり、駆動電流は、外部から制御出力端子Poutに流れ、抵抗R1及び磁界検出回路40を流れる。代替例として、第2の電流路内の抵抗R1は、単方向スイッチ33とは逆向きに並列に接続された別の単方向スイッチと置き換えることができる。このように、制御出力端子から流れる駆動電流は、制御出力端子に流れる駆動電流と相対的にバランスするが、これは本開示に限定されない。
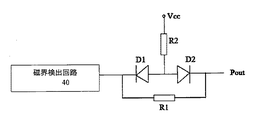
別の特定の実施構成では、図10に示すように、切換制御回路30は、磁界検出回路40の出力端子と制御出力端子Poutとの間に逆向きに直列に接続されたダイオードD1及びD2と、直列に接続されたD1及びD2と並列に接続された抵抗R1と、ダイオードD1及びD2の共通の端子と外部電源Vccとの間に接続された抵抗R2とを含む。ダイオードD1のカソードは、磁界検出回路40の出力端子に接続される。ダイオードD1は磁界検出回路40によって制御される。磁界検出回路40が高レベルを出力する場合、ダイオードD1はオフとなり、駆動電流は、電源Vccから流れ、抵抗R2及びダイオードD2を通り、制御出力端子Poutから外部に流れる。磁界検出回路40が低レベルを出力する場合、駆動電流は、外部から制御出力端子Poutに流れ、抵抗R1及び磁界検出回路40を通って流れる。
本開示の実施形態では、図6に示すように、モータ100は、外部交流電源300の両端に双方向交流スイッチ20に対して直列に接続される。切換制御回路30は、交流電源300の極性及び磁界検出情報の変化に基づいて、第1の状態と第2の状態との間で切り換わることができる。
本開示の実施形態では、交流電源300が正の半周期にありかつ磁界検出回路40によって検出される回転子の磁界の極性が第1の極性である場合、又は交流電源300が負の半周期にありかつ磁界検出回路40によって検出される回転子の磁界が第1の極性とは反対の第2の極性である場合、切換制御回路30は、制御出力端子に駆動電流が流れるようにすることができる。交流電源300が正の半周期にありかつ回転子の磁界の極性が第2の極性である場合、又は交流電源300が負の半周期にありかつ回転子の磁界の極性が第1の極性である場合、制御出力端子には駆動電流が流れない。交流電源300が正の半周期にありかつ回転子の磁界が第1の極性を有する場合、又は交流電源300が負の半周期にありかつ回転子の磁界が第2の極性を有する場合、制御出力端子に駆動電流が流れる状况は、上述した2つの場合の全ての継続時間の間、制御出力端子に駆動電流が流れる状况とすること、又は上述した2つの場合の一部の継続時間の間、出力制御端子に駆動電流が流れる状况とすることができることに留意されたい。
本開示の実施形態では、図11に示すように、モータ駆動回路は、降圧回路10と直列に接続された整流回路60をさらに含む。整流回路60は、交流電源300から出力される交流信号を直流信号へ変換することができる。
本開示の実施形態では、整流回路60の入力端子は、交流電源300に接続される第1の入力端子及び第2の入力端子を含むことができることに留意されたい。本開示では、入力端子が交流電源300に接続される場合とは、入力端子を交流電源300の2つの端子に直接接続する場合、又は入力端子を交流電源300の2つの端子の両端の間でモータと直列に接続する場合とすることができ、これは、整流回路60が交流電源300から出力された交流信号を直流信号へ変換することができる限り、本開示に限定されず、特定の状况に左右される。
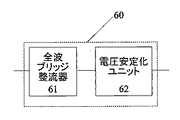
本開示の具体的な実施形態では、図12に示すように、整流回路60は、全波ブリッジ整流器61と、全波ブリッジ整流器61の出力に接続された電圧安定化ユニット62とを含むことができる。全波ブリッジ整流器61は、交流電源300から出力される交流を直流へ変換することができ、電圧安定化ユニット62は、全波ブリッジ整流器61から出力された直流信号を予め設定された範囲に安定させることができる。
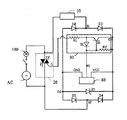
図13には、整流回路60の具体的な回路が示される。電圧安定化ユニット62は、全波ブリッジ整流器61の2つの出力端子間に接続されたツェナーダイオード621を含む。全波ブリッジ整流器61は、直列に接続された第1のダイオード611及び第2のダイオード612と、直列に接続された第3のダイオード613及び第4のダイオード614とを含む。第1のダイオード611及び第2のダイオード612の共通の端子は、第1の入力端子VAC+に電気的に接続され、第3のダイオード613及び第4のダイオード614の共通の端子は、第2の入力端子VAC−に電気的に接続される。
第1のダイオード611の入力端子は、第3のダイオード613の入力端子に電気的に接続され、全波ブリッジ整流器の接地出力端子を形成するようになっており、第2のダイオード612の出力端子は、第4のダイオード614の出力端子に電気的に接続され、全波ブリッジ整流器の電圧出力端子VDDを形成するようになっている。ツェナーダイオード621は、第2のダイオード612及び第4のダイオード614の共通の端子と、第1のダイオード611及び第3のダイオード613の共通の端子との間に接続される。本開示の実施形態では、切換制御回路30の電源端子は、全波ブリッジ整流器61の電圧出力端子に電気的に接続できることに留意されたい。
従って、上記の実施形態のいずれかによるモータ組立体を含む応用機器がさらに提供される。好ましくは、応用機器は、ポンプ、ファン、家電、又は車両であり、本開示に限定されず、特定の状况に左右される。
上記の実施形態に基づいて、本開示の実施形態では、モータ組立体におけるモータは、単相永久磁石ブラシレスモータであり、本開示に限定されず、特定の状況に左右される。要約すると、従来のモータ駆動回路の機能が、本開示の実施形態によるモータ組立体によって提供されるので、回路全体のコストが低減しかつ回路の信頼性が高くなる。
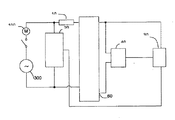
さらに、本開示の実施形態による集積回路がさらに提供される。集積回路は、ハウジングと、このハウジングの内部に配置された半導体基板と、ハウジングから外方に延びる入力ポート及び出力ポートと、半導体基板上に配置された電子回路とを含む。図14に示すように、電子回路は降圧回路10を含み、この降圧回路は、選択的にオンとされる第1の電流分岐及び第2の電流分岐を含む。上記の実施形態に基づいて、本開示の実施形態では、降圧回路は、上記の実施形態のいずれかによるモータ組立体における降圧回路の特徴を有することに留意されたい。
本開示の実施形態による降圧回路は、集積回路に統合することができる。放熱板を集積回路のハウジングに固定することができるので、降圧回路は、放熱板を介して放熱することができ、内部回路の非常な高い温度に起因する損傷を回避できる。
本開示の実施形態では、図14に示すように、電子回路は、磁界検出回路40、切換制御回路30、双方向交流スイッチ20、及び整流回路(ダイオードD2、D3、D4及びD5を含む)の一部又は全てをさらに含む。磁界検出回路、切換制御回路、双方向交流スイッチ、及び整流回路の構造及び機能については、上記の実施形態のいずれかによるモータ組立体の磁界検出回路、切換制御回路、双方向交流スイッチ、及び整流回路の構造及び機能を参照することができるので、本開示では繰り返し説明しない。
上記の実施形態のいずれかに基づいて、本開示の実施形態では、放熱板がハウジングに固定され、電子回路で発生した熱を外部環境に放散して、電子回路の非常に高い温度に起因するその損傷を回避するようになっている。
別の実施形態では、モータは、ノードAとノードCとの間で双方向スイッチに対して直列に接続することができ、ノードA及びノードCは、交流電源の2つの端子にそれぞれ接続することができる。
本開示において、モータ組立体、集積回路、及びモータ組立体を含む応用機器が提供される。モータ組立体はモータ及びモータ駆動回路を含み、モータ駆動回路は降圧回路を含み、降圧回路は選択的にオンとされる第1の電流分岐及び第2の電流分岐を含む。本開示の実施形態によるモータ組立体では、降圧回路は、特定用途向け集積回路に統合され、回路の複雑性及びコストを低減するようになっている。
説明を容易にするために、上記システムは、機能に基づき様々なモジュールに分けてそれぞれ説明される。もちろん、本開示を実行する際に、様々なモジュールの機能は、1又は2以上のソフトウェア及び/又はハードウェアで実施することができる。
「第1」、「第2」及びそれと同じような、関係性を示す用語は、本明細書においては、1つの実体または動作を他のものと区別するためにのみ用いられるものであり、実体又は動作の間に実際の関係又は順序が存在することを要する又は含意するものではない。さらに、「含む」、「備える」又はその他のいかなる変形も、非排他的であることが意図される。したがって、複数の要素を含むプロセス、方法、物品若しくは装置は、開示された要素のみを含むのではなく、明確に列挙されていない他の要素も含み、又は該プロセス、方法、物品若しくは装置の固有の要素も含む。別途明示的に限定されない限り、「...を含む」という言明は、列挙された要素以外にプロセス、方法、物品又は装置内に他の同様の要素が存在し得る場合を排除しない。
本明細書の実施形態の説明は、当業者が本開示を実装すること又は使用することを可能にする。実施形態に対する多数の変更は当業者には明らかであり、本明細書で定められた一般原理は、本開示の思想又は範囲から逸脱することなく他の実施形態で実装することができる。したがって、本開示は、本明細書で説明される実施形態に限定される必要はなく、本明細書で開示された原理及び新規の特徴と矛盾しない最も広い範囲に従う。
10 降圧回路
100 モータ
AC 交流電源
101 第1の電流分岐
102 第2の電流分岐
200 モータ駆動回路
100 モータ
AC 交流電源
101 第1の電流分岐
102 第2の電流分岐
200 モータ駆動回路
Claims (10)
- モータ及びモータ駆動回路を備えるモータ組立体であって、前記モータ駆動回路は、選択的にオンとされる第1の電流分岐及び第2の電流分岐を有する降圧回路を備える、ことを特徴とするモータ組立体。
- 前記第1の電流分岐及び前記第2の電流分岐は、反対方向の電流を流すことができる単方向電流分岐である、請求項1に記載のモータ組立体。
- 前記第1の電流分岐は電力トランジスタを備え、前記第1の電流分岐がオンとされると、前記電力トランジスタは増幅器モードで作動する、請求項2に記載のモータ組立体。
- 前記降圧回路は、第1の端子及び第2の端子を備え、
前記第1の電流分岐は、第1の切換トランジスタ及び第1の抵抗を備え、前記第1の切換トランジスタの電流入力端子は前記第1の端子に電気的に接続され、前記第1の切換トランジスタの電流出力端子は前記第2の端子に電気的に接続され、前記第1の切換トランジスタの制御端子は前記第1の抵抗の端子に電気的に接続され、前記第1の抵抗の別の端子は、前記第1の切換トランジスタの前記電流入力端子に電気的に接続され、
前記第2の電流分岐は、第2の切換トランジスタ及び第2の抵抗を備え、前記第2の切換トランジスタの電流入力端子は前記第2の端子に電気的に接続され、前記第2の切換トランジスタの電流出力端子は前記第1の端子に電気的に接続され、前記第2の切換トランジスタの制御端子は前記第2の抵抗の端子に電気的に接続され、前記第2の抵抗の別の端子は前記第2の切換トランジスタの前記電流入力端子に電気的に接続される、請求項1に記載のモータ組立体。 - 前記第1の切換トランジスタの前記電流入力端子と前記電流出力端子との間の電圧降下は、前記第2の切換トランジスタの前記電流入力端子と電流出力端子との間の電圧降下と等しい、請求項4に記載のモータ組立体。
- 前記モータ駆動回路は、両方共に前記モータに対して直列に接続される双方向交流スイッチ及び切換制御回路をさらに備え、前記切換制御回路の制御出力端子が、前記双方向交流スイッチの制御端子に電気的に接続される、請求項1から5のいずれかに記載のモータ組立体。
- 前記モータ駆動回路は、前記モータの回転子の磁界を検出して、磁界検出情報を前記切換制御回路に出力する磁界検出回路をさらに備える、請求項6に記載のモータ組立体。
- 集積回路であって、ハウジングと、前記ハウジングの内部に配置された半導体基板と、前記ハウジングから外方に延びる入力ポート及び出力ポートと、前記半導体基板上に配置された電子回路とを備え、前記電子回路は、選択的にオンとされる第1の電流分岐及び第2の電流分岐を含む降圧回路を備える、ことを特徴とする集積回路。
- 放熱板が前記ハウジングに固定される、請求項8に記載の集積回路。
- 請求項1から7のいずれかに記載のモータ組立体を備える応用機器。
Applications Claiming Priority (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201410390592 | 2014-08-08 | ||
| CN201410404474.2A CN107634683B (zh) | 2014-08-08 | 2014-08-15 | 同步电机驱动电路 |
| WOPCT/CN2015/086422 | 2015-08-07 | ||
| PCT/CN2015/086422 WO2016019921A1 (zh) | 2014-08-08 | 2015-08-07 | 电机组件及用于电机驱动的集成电路 |
| CN201610524458.6 | 2016-07-05 | ||
| CN201610524458.6A CN106452227B (zh) | 2014-08-08 | 2016-07-05 | 电机组件、集成电路和应用设备 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017104002A true JP2017104002A (ja) | 2017-06-08 |
Family
ID=53783646
Family Applications (14)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017526740A Pending JP2017523768A (ja) | 2014-08-08 | 2015-08-07 | 駆動モータ用のモータ構成部品及び集積回路 |
| JP2017526741A Abandoned JP2017529057A (ja) | 2014-08-08 | 2015-08-07 | 駆動モータ用の送風機、ポンプ、モータ組立品及び集積回路 |
| JP2015158281A Abandoned JP2016039778A (ja) | 2014-08-08 | 2015-08-10 | 永久磁石モータのための駆動回路 |
| JP2015005315U Expired - Fee Related JP3202526U (ja) | 2014-08-08 | 2015-10-20 | 永久磁石モータのための駆動回路 |
| JP2016155987A Pending JP2017055640A (ja) | 2014-08-08 | 2016-08-08 | 集積回路、モータの駆動回路、モータアセンブリ及びその応用機器 |
| JP2016155511A Pending JP2017104002A (ja) | 2014-08-08 | 2016-08-08 | モータ組立体、集積回路、及び応用機器 |
| JP2016155643A Pending JP2017073959A (ja) | 2014-08-08 | 2016-08-08 | モータ駆動回路及びモータ構成要素 |
| JP2016155947A Pending JP2017053845A (ja) | 2014-08-08 | 2016-08-08 | 集積回路、モータ構成要素及び該モータ構成要素を有する応用装置 |
| JP2016155670A Pending JP2017055638A (ja) | 2014-08-08 | 2016-08-08 | モータ構成要素及びモータ駆動回路 |
| JP2016155642A Pending JP2017060382A (ja) | 2014-08-08 | 2016-08-08 | モータ駆動回路及びモータ構成要素 |
| JP2016155946A Pending JP2017055639A (ja) | 2014-08-08 | 2016-08-08 | 応用機器及びモータ駆動回路 |
| JP2016005894U Expired - Fee Related JP3210891U (ja) | 2014-08-08 | 2016-12-09 | 電子装置及び磁気センサ集積回路 |
| JP2016006001U Expired - Fee Related JP3211139U (ja) | 2014-08-08 | 2016-12-15 | モータ駆動回路及びモータ構成要素 |
| JP2016006000U Expired - Fee Related JP3211138U (ja) | 2014-08-08 | 2016-12-15 | モータ駆動回路及びモータ構成要素 |
Family Applications Before (5)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017526740A Pending JP2017523768A (ja) | 2014-08-08 | 2015-08-07 | 駆動モータ用のモータ構成部品及び集積回路 |
| JP2017526741A Abandoned JP2017529057A (ja) | 2014-08-08 | 2015-08-07 | 駆動モータ用の送風機、ポンプ、モータ組立品及び集積回路 |
| JP2015158281A Abandoned JP2016039778A (ja) | 2014-08-08 | 2015-08-10 | 永久磁石モータのための駆動回路 |
| JP2015005315U Expired - Fee Related JP3202526U (ja) | 2014-08-08 | 2015-10-20 | 永久磁石モータのための駆動回路 |
| JP2016155987A Pending JP2017055640A (ja) | 2014-08-08 | 2016-08-08 | 集積回路、モータの駆動回路、モータアセンブリ及びその応用機器 |
Family Applications After (8)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016155643A Pending JP2017073959A (ja) | 2014-08-08 | 2016-08-08 | モータ駆動回路及びモータ構成要素 |
| JP2016155947A Pending JP2017053845A (ja) | 2014-08-08 | 2016-08-08 | 集積回路、モータ構成要素及び該モータ構成要素を有する応用装置 |
| JP2016155670A Pending JP2017055638A (ja) | 2014-08-08 | 2016-08-08 | モータ構成要素及びモータ駆動回路 |
| JP2016155642A Pending JP2017060382A (ja) | 2014-08-08 | 2016-08-08 | モータ駆動回路及びモータ構成要素 |
| JP2016155946A Pending JP2017055639A (ja) | 2014-08-08 | 2016-08-08 | 応用機器及びモータ駆動回路 |
| JP2016005894U Expired - Fee Related JP3210891U (ja) | 2014-08-08 | 2016-12-09 | 電子装置及び磁気センサ集積回路 |
| JP2016006001U Expired - Fee Related JP3211139U (ja) | 2014-08-08 | 2016-12-15 | モータ駆動回路及びモータ構成要素 |
| JP2016006000U Expired - Fee Related JP3211138U (ja) | 2014-08-08 | 2016-12-15 | モータ駆動回路及びモータ構成要素 |
Country Status (10)
| Country | Link |
|---|---|
| US (4) | US9755555B2 (ja) |
| EP (1) | EP2983288B1 (ja) |
| JP (14) | JP2017523768A (ja) |
| KR (3) | KR20170039740A (ja) |
| CN (17) | CN107251405B (ja) |
| BR (1) | BR102015019000B1 (ja) |
| DE (2) | DE112015003676T5 (ja) |
| MX (3) | MX2017001792A (ja) |
| TW (6) | TWM542218U (ja) |
| WO (2) | WO2016019921A1 (ja) |
Families Citing this family (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017523768A (ja) * | 2014-08-08 | 2017-08-17 | ジョンソン エレクトリック ソシエテ アノニム | 駆動モータ用のモータ構成部品及び集積回路 |
| CN106469958A (zh) * | 2015-08-14 | 2017-03-01 | 德昌电机(深圳)有限公司 | 流体产生装置 |
| EP3135937A1 (en) * | 2015-08-14 | 2017-03-01 | Johnson Electric S.A. | Electric apparatus, actuator and clutch thereof |
| CN107231062A (zh) * | 2016-03-24 | 2017-10-03 | 德昌电机(深圳)有限公司 | 冷却风扇及应用该冷却风扇的风冷冰箱 |
| DE102017106426A1 (de) * | 2016-03-28 | 2017-09-28 | Johnson Electric S.A. | Motor, Ständer und Verfahren zum Bilden des Ständers |
| DE102016118501A1 (de) | 2016-09-29 | 2018-03-29 | Miele & Cie. Kg | Zweisträngiger Einphasen-Synchronantrieb |
| US10461671B2 (en) * | 2017-03-29 | 2019-10-29 | Qm Power, Inc. | Multispeed alternating current motor |
| CN108696057B (zh) * | 2017-04-12 | 2021-06-25 | 德昌电机(深圳)有限公司 | 电机及具有该电机的用电设备 |
| CN109672373A (zh) * | 2017-08-25 | 2019-04-23 | 德昌电机(深圳)有限公司 | 电机及其驱动电路与驱动方法 |
| CN109687780A (zh) * | 2017-08-25 | 2019-04-26 | 德昌电机(深圳)有限公司 | 电机及其驱动电路与驱动方法 |
| CN109842330B (zh) * | 2017-11-24 | 2021-12-14 | 南京德朔实业有限公司 | 一种单相无刷电机的控制方法 |
| DE102017223061A1 (de) * | 2017-12-18 | 2019-06-19 | Bühler Motor GmbH | Kommutatormotor und baureihe von kommutatormotoren |
| JP7061457B2 (ja) | 2017-12-22 | 2022-04-28 | ローム株式会社 | 磁気センサ、半導体装置及び電気機器 |
| CN111226626B (zh) * | 2018-11-28 | 2022-09-16 | 南京泉峰科技有限公司 | 链锯、电动工具以及电动工具的控制方法 |
| CN109921770A (zh) * | 2019-03-07 | 2019-06-21 | 维沃移动通信有限公司 | 一种马达驱动电路及终端设备 |
| WO2021212238A1 (en) * | 2020-04-25 | 2021-10-28 | 121352 Canada Inc. | Electric motors and methods of controlling thereof |
| IT202000016672A1 (it) * | 2020-07-09 | 2022-01-09 | De Longhi Appliances Srl | Metodo e circuito di controllo per un motore a corrente continua |
| CN111856337A (zh) * | 2020-07-10 | 2020-10-30 | 海信集团有限公司 | 一种控制电路、控制板、电器设备以及控制方法 |
| US11424709B2 (en) * | 2020-11-05 | 2022-08-23 | Raptor Lift Solutions, Llc | Method and apparatus for riding through power disruptions of a drive circuit |
| CN113053836A (zh) * | 2021-03-09 | 2021-06-29 | 深圳市恒驱电机股份有限公司 | 一种智能功率芯片 |
| JP7734538B2 (ja) * | 2021-07-06 | 2025-09-05 | 株式会社マキタ | 電動作業機 |
| US11522465B1 (en) * | 2021-08-18 | 2022-12-06 | Aes Global Holdings Pte Ltd. | High precision power controller |
| CN121441023A (zh) * | 2021-11-04 | 2026-01-30 | 佛山市霍斯智能控制科技有限公司 | 一种三线直流电机转向和转速信号的传输电路 |
| CN114485738B (zh) * | 2022-01-06 | 2024-01-12 | 天津中德应用技术大学 | 一种双组霍尔传感器装置及其控制方法 |
| CN115603615A (zh) * | 2022-11-09 | 2023-01-13 | 中山市富迪电器有限公司(Cn) | 一种交流电机线圈的驱动电路 |
| US12278578B2 (en) | 2022-11-23 | 2025-04-15 | Whirlpool Corporation | Analog dynamic triac firing circuit |
| TWI904946B (zh) * | 2024-11-22 | 2025-11-11 | 研深電機工業有限公司 | 馬達轉向切換器及具有該馬達轉向切換器之數位控制馬達 |
Family Cites Families (52)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3056896A (en) * | 1958-11-10 | 1962-10-02 | Licentia Gmbh | Stator for a.c. motor |
| US3596159A (en) * | 1968-03-22 | 1971-07-27 | Janome Sewing Machine Co Ltd | Speed control circuit for a single-phase motor,using a thyristor |
| JPS48102222A (ja) * | 1972-04-12 | 1973-12-22 | ||
| DE2407601C2 (de) * | 1974-02-16 | 1980-04-17 | Robert Bosch Gmbh, 7000 Stuttgart | Steuereinrichtung zur Absenkung der Drehzahl eines wechselstromgespeisten Reihenschlußmotors im Leerlaufbetrieb |
| US4896105A (en) * | 1988-03-25 | 1990-01-23 | Westinghouse Electric Corp. | AC electric energy meter having drive circuit including stepper motor for driving mechanical register |
| US4949214A (en) * | 1989-08-28 | 1990-08-14 | Spencer George A | Trip delay override for electrical circuit breakers |
| US6348752B1 (en) * | 1992-04-06 | 2002-02-19 | General Electric Company | Integral motor and control |
| US5682459A (en) * | 1995-07-27 | 1997-10-28 | Wilkerson; Alan W. | Speed control for controlling the speed of a DC motor |
| US5675226A (en) * | 1995-09-06 | 1997-10-07 | C.E.Set. S.R.L. | Control circuit for an synchronous electric motor of the brushless type |
| JP3555297B2 (ja) * | 1996-02-06 | 2004-08-18 | 松下電器産業株式会社 | 動力発生装置及びその応用機器たる掃除機 |
| US6118427A (en) * | 1996-04-18 | 2000-09-12 | Silicon Graphics, Inc. | Graphical user interface with optimal transparency thresholds for maximizing user performance and system efficiency |
| US6097127A (en) * | 1996-08-22 | 2000-08-01 | Rivera; Nicholas N. | Permanent magnet direct current (PMDC) machine with integral reconfigurable winding control |
| JPH1084685A (ja) * | 1996-09-06 | 1998-03-31 | Tominaga Jushi Kogyosho:Kk | 交流2極モータの回転方向制御装置 |
| JPH10117495A (ja) * | 1996-10-09 | 1998-05-06 | Higashifuji Manuf Ltd | リバーシブルモータ |
| IT1289817B1 (it) * | 1996-12-30 | 1998-10-16 | Plaset Srl | Dispositivo per il controllo di un motore elettrico sincrono con rotore a magnete permanente |
| JPH10337065A (ja) * | 1997-06-03 | 1998-12-18 | Techno Takatsuki:Kk | 同期電動機およびその始動法 |
| JP3446692B2 (ja) * | 1999-11-24 | 2003-09-16 | 三菱電機株式会社 | 単相モータの制御装置並びに該単相モータの制御装置を用いたアクチュエータ及び送風機 |
| KR100367478B1 (ko) * | 2000-12-15 | 2003-01-10 | 김준 | 슬롯리스 스테이터 코어를 사용한 브러시리스 직류 모터용 스테이터 어셈블리 제조 방법과 이를 이용한브러시리스 직류 모터 |
| DE10103845B4 (de) * | 2001-01-30 | 2006-11-16 | Ontoprise Gmbh | Rechnersystem |
| DK1351375T3 (da) * | 2002-03-05 | 2005-01-10 | Askoll Holding Srl | Permanentmagnetsynkronmotor med elektronisk indretning til start af motoren og med sensormidler, hvis postion er afhængig af den af motoren drevne belastning |
| US6767817B2 (en) * | 2002-07-11 | 2004-07-27 | Micron Technology, Inc. | Asymmetric plating |
| JP4053840B2 (ja) * | 2002-08-26 | 2008-02-27 | 富士通株式会社 | 半導体集積回路 |
| JP2004153906A (ja) * | 2002-10-29 | 2004-05-27 | Asahi Kasei Microsystems Kk | 逆接続防止装置 |
| CN2622928Y (zh) * | 2003-05-08 | 2004-06-30 | 建准电机工业股份有限公司 | 直流无刷风扇马达的转速控制电路 |
| ITMI20031661A1 (it) * | 2003-08-22 | 2005-02-23 | Askoll Holding Srl | Dispositivo elettronico di accensione e spegnimento per |
| JP2005245167A (ja) * | 2004-02-27 | 2005-09-08 | Matsushita Electric Ind Co Ltd | 直流電源装置 |
| US7208907B2 (en) * | 2004-10-21 | 2007-04-24 | Shop Vac Corporation | System and method of restarting a switched reluctance motor after a rapid cycling of power |
| JP4691376B2 (ja) * | 2005-03-25 | 2011-06-01 | 山洋電気株式会社 | 永久磁石型回転モータ |
| US20070103103A1 (en) * | 2005-11-09 | 2007-05-10 | Maue H W | Bi-directional motor voltage conversion circuit |
| US7173388B1 (en) * | 2005-11-14 | 2007-02-06 | Power Logic Tech. Inc. | Drive control device for brushless motor |
| US7536860B2 (en) * | 2006-05-25 | 2009-05-26 | Thermotion Corporation | Thermo-magnetic actuator |
| US7622876B2 (en) * | 2006-07-31 | 2009-11-24 | Danaher Motion, Llc | Overload prevention device for permanent magnet DC motors |
| NZ549662A (en) * | 2006-09-04 | 2009-01-31 | Wellington Drive Technologies | Control of synchronous electrical machines |
| CN101174804A (zh) * | 2006-10-31 | 2008-05-07 | 德昌电机股份有限公司 | 用于同步马达的电子启动控制设备 |
| DE102006055482A1 (de) | 2006-11-24 | 2008-06-12 | Hanning Elektro-Werke Gmbh & Co. Kg | Verfahren zur elektronischen Ansteuerung eines Synchronmotors |
| JP5150276B2 (ja) * | 2008-01-25 | 2013-02-20 | パナソニック株式会社 | モータのインシュレータ構造 |
| US7791232B2 (en) * | 2008-05-02 | 2010-09-07 | Black & Decker Inc. | Power tool having an electronically commutated motor and double insulation |
| CN101662205B (zh) * | 2008-08-27 | 2013-07-10 | 德昌电机(深圳)有限公司 | 加速升降压电路 |
| JP4823294B2 (ja) * | 2008-11-04 | 2011-11-24 | 三菱電機株式会社 | 送風機及びこの送風機を用いたヒートポンプ装置 |
| CN201409107Y (zh) * | 2009-03-12 | 2010-02-17 | 敬石桥 | 交流电机控制电路及交流同步水泵 |
| GB0908111D0 (en) * | 2009-05-12 | 2009-06-24 | Peto Raymond J | A motor controller & related method |
| CN201590796U (zh) * | 2009-11-18 | 2010-09-22 | 佛山市顺德区泛仕达机电有限公司 | 单相永磁同步电机驱动电路 |
| US8618751B2 (en) * | 2009-12-30 | 2013-12-31 | Leviton Manufacturing Co., Inc. | Phase control with adaptive parameters |
| CN201839250U (zh) * | 2010-01-21 | 2011-05-18 | 艾如菊 | 设置有转向控制电路的单相永磁体同步电动机及其转向控制电路 |
| PL2410653T3 (pl) * | 2010-07-23 | 2019-09-30 | Askoll Holding S.R.L. | Urządzenie do sterowania synchronicznym silnikiem elektrycznym z wirnikiem z magnesami trwałymi |
| TWI553998B (zh) * | 2012-07-06 | 2016-10-11 | 緯創資通股份有限公司 | 動態充電裝置及動態充電方法 |
| GB201304269D0 (en) * | 2013-03-08 | 2013-04-24 | Dyson Technology Ltd | Drive circuit for a brushless motor |
| CN103281019B (zh) * | 2013-05-29 | 2015-06-03 | 东南大学 | 永磁同步电机容错型牵引模块及其控制方法 |
| US20160352267A1 (en) * | 2014-08-08 | 2016-12-01 | Johnson Electric S.A. | Motor driving circuit and motor component |
| JP2017523768A (ja) * | 2014-08-08 | 2017-08-17 | ジョンソン エレクトリック ソシエテ アノニム | 駆動モータ用のモータ構成部品及び集積回路 |
| CN205984965U (zh) * | 2015-08-07 | 2017-02-22 | 德昌电机(深圳)有限公司 | 集成电路、电机组件和具有该电机组件的应用设备 |
| CN204993125U (zh) * | 2015-08-07 | 2016-01-20 | 德昌电机(深圳)有限公司 | 电机组件、用于电机驱动的集成电路、风机及泵 |
-
2015
- 2015-08-07 JP JP2017526740A patent/JP2017523768A/ja active Pending
- 2015-08-07 DE DE112015003676.8T patent/DE112015003676T5/de not_active Withdrawn
- 2015-08-07 DE DE112015003682.2T patent/DE112015003682T5/de not_active Withdrawn
- 2015-08-07 KR KR1020177006374A patent/KR20170039740A/ko not_active Withdrawn
- 2015-08-07 WO PCT/CN2015/086422 patent/WO2016019921A1/zh not_active Ceased
- 2015-08-07 BR BR102015019000-0A patent/BR102015019000B1/pt not_active IP Right Cessation
- 2015-08-07 WO PCT/CN2015/086423 patent/WO2016019922A1/zh not_active Ceased
- 2015-08-07 CN CN201580052597.7A patent/CN107251405B/zh not_active Expired - Fee Related
- 2015-08-07 MX MX2017001792A patent/MX2017001792A/es unknown
- 2015-08-07 KR KR1020150111708A patent/KR20160018434A/ko not_active Withdrawn
- 2015-08-07 JP JP2017526741A patent/JP2017529057A/ja not_active Abandoned
- 2015-08-07 MX MX2017001793A patent/MX2017001793A/es unknown
- 2015-08-07 CN CN201580052595.8A patent/CN107306517B/zh not_active Expired - Fee Related
- 2015-08-07 EP EP15180248.5A patent/EP2983288B1/en active Active
- 2015-08-07 KR KR1020177006216A patent/KR20170039728A/ko not_active Withdrawn
- 2015-08-10 US US14/822,353 patent/US9755555B2/en not_active Expired - Fee Related
- 2015-08-10 JP JP2015158281A patent/JP2016039778A/ja not_active Abandoned
- 2015-10-20 JP JP2015005315U patent/JP3202526U/ja not_active Expired - Fee Related
-
2016
- 2016-06-02 CN CN201610390067.XA patent/CN106449583A/zh not_active Withdrawn
- 2016-06-16 CN CN201620601393.6U patent/CN205846998U/zh not_active Expired - Fee Related
- 2016-06-16 CN CN201610437236.0A patent/CN106451925A/zh not_active Withdrawn
- 2016-06-20 CN CN201620606339.0U patent/CN205864187U/zh not_active Expired - Fee Related
- 2016-06-20 CN CN201610447131.3A patent/CN106451926A/zh not_active Withdrawn
- 2016-06-20 CN CN201610447057.5A patent/CN106452222B/zh not_active Expired - Fee Related
- 2016-06-20 CN CN201620608979.5U patent/CN205883093U/zh not_active Withdrawn - After Issue
- 2016-07-05 CN CN201610524458.6A patent/CN106452227B/zh not_active Expired - Fee Related
- 2016-07-05 CN CN201610523521.4A patent/CN106452211B/zh not_active Expired - Fee Related
- 2016-07-06 CN CN201610529496.0A patent/CN106443516A/zh not_active Withdrawn
- 2016-07-06 CN CN201610529406.8A patent/CN106452223A/zh not_active Withdrawn
- 2016-07-06 CN CN201610527483.XA patent/CN106452228A/zh not_active Withdrawn
- 2016-07-06 CN CN201620709071.3U patent/CN206270478U/zh not_active Expired - Fee Related
- 2016-07-06 CN CN201620709072.8U patent/CN206211891U/zh not_active Expired - Fee Related
- 2016-07-08 CN CN201610539478.0A patent/CN106452268A/zh not_active Withdrawn
- 2016-07-27 MX MX2016009741A patent/MX2016009741A/es unknown
- 2016-08-05 TW TW105211936U patent/TWM542218U/zh not_active IP Right Cessation
- 2016-08-05 TW TW105211940U patent/TWM542288U/zh not_active IP Right Cessation
- 2016-08-05 TW TW105211937U patent/TWM547783U/zh not_active IP Right Cessation
- 2016-08-06 TW TW105211944U patent/TWM542243U/zh not_active IP Right Cessation
- 2016-08-06 TW TW105211942U patent/TWM542245U/zh not_active IP Right Cessation
- 2016-08-06 TW TW105211943U patent/TWM541519U/zh not_active IP Right Cessation
- 2016-08-08 JP JP2016155987A patent/JP2017055640A/ja active Pending
- 2016-08-08 JP JP2016155511A patent/JP2017104002A/ja active Pending
- 2016-08-08 JP JP2016155643A patent/JP2017073959A/ja active Pending
- 2016-08-08 US US15/231,172 patent/US10439529B2/en not_active Expired - Fee Related
- 2016-08-08 JP JP2016155947A patent/JP2017053845A/ja active Pending
- 2016-08-08 JP JP2016155670A patent/JP2017055638A/ja active Pending
- 2016-08-08 JP JP2016155642A patent/JP2017060382A/ja active Pending
- 2016-08-08 JP JP2016155946A patent/JP2017055639A/ja active Pending
- 2016-12-09 JP JP2016005894U patent/JP3210891U/ja not_active Expired - Fee Related
- 2016-12-15 JP JP2016006001U patent/JP3211139U/ja not_active Expired - Fee Related
- 2016-12-15 JP JP2016006000U patent/JP3211138U/ja not_active Expired - Fee Related
-
2017
- 2017-02-07 US US15/426,570 patent/US20170149311A1/en not_active Abandoned
- 2017-02-07 US US15/426,599 patent/US20170149312A1/en not_active Abandoned
Also Published As
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2017104002A (ja) | モータ組立体、集積回路、及び応用機器 | |
| US10205412B2 (en) | Motor driving circuit and motor component | |
| CN206135752U (zh) | 电机组件、集成电路和应用设备 | |
| JP3207757U (ja) | モータ組立体、集積回路、及び応用機器 | |
| US20160344320A1 (en) | Magnetic sensor integrated circuit, motor component and application apparatus | |
| JP3211136U (ja) | 磁気センサ集積回路及びモータ組立体 | |
| US10637374B2 (en) | Magnetic sensor integrated circuit, motor component and application apparatus | |
| CN106452210B (zh) | 磁传感器集成电路、电机组件及应用设备 | |
| US20160359395A1 (en) | Motor assembly, integrated circuit and application device | |
| US10205413B2 (en) | Magnetic sensor integrated circuit, motor assembly and application device | |
| JP3209106U (ja) | 磁気センサ集積回路及びモータ組立体 | |
| JP3207073U (ja) | 磁気センサ集積回路及びモータ組立体 | |
| JP3207076U (ja) | 集積回路、モータ構成要素及び該モータ構成要素を有する応用装置 | |
| JP3209065U (ja) | モータ構成要素及びモータ駆動回路 | |
| KR20170017815A (ko) | 모터 구동 회로 및 모터 부품 | |
| KR20170017822A (ko) | 모터 구동 회로 및 모터 구성요소 | |
| TWM539091U (zh) | 電機組件、應用設備及感測器積體電路 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160908 |