JP2017105387A - 車両の操向制御システムおよび操向制御方法 - Google Patents
車両の操向制御システムおよび操向制御方法 Download PDFInfo
- Publication number
- JP2017105387A JP2017105387A JP2015242031A JP2015242031A JP2017105387A JP 2017105387 A JP2017105387 A JP 2017105387A JP 2015242031 A JP2015242031 A JP 2015242031A JP 2015242031 A JP2015242031 A JP 2015242031A JP 2017105387 A JP2017105387 A JP 2017105387A
- Authority
- JP
- Japan
- Prior art keywords
- turning
- vehicle
- hydraulic pump
- super
- traveling
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






Landscapes
- Non-Deflectable Wheels, Steering Of Trailers, Or Other Steering (AREA)
Abstract
【解決手段】操向制御システムの制御装置50は、アクセルペダル52が操作されていない状態で超信地旋回モード切替スイッチ57がオフされている場合には、ハンドル56の操作によって旋回用油圧ポンプ7の流量が変化しないように、ハンドル56と旋回用油圧ポンプ7とが非連動状態となるように制御する。また、アクセルペダル52が操作されていない状態で超信地旋回モード切替スイッチ57がオンされている場合には、ハンドル56の操作量に応じてエンジン5の回転数と、旋回用油圧ポンプ7の流量とを変化させ、車両2の停車状態から超信地旋回を行なう。
【選択図】図5
Description
以下、この発明を図示の実施の形態に基づいて説明する。
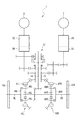
次に、本発明の第2の実施の形態について説明する。なお、第1の実施の形態と同部品については、同符号を用いて詳しい説明は省略する。図7は、第2の実施の形態を適用した走行駆動装置80の動力伝達ブロック図である。この走行駆動装置80は、第1の実施の形態の走行駆動装置1とは逆に、走行用入力シャフト14を円筒状とし、この走行用入力シャフト14に旋回用入力シャフト15を貫通させている。また、走行駆動装置1では、走行用入力シャフト14および旋回用入力シャフト15と、左右一対の遊星歯車機構16L、16Rとの連結に複数のベベルギヤ28A、28B、29A、29BL、29BRを用いたが、本実施の形態では、複数の平歯車と、左右のリングギヤ47L、47Rの外周に設けられた伝達ギヤ81L、81Rとを用いて、走行用入力シャフト14および旋回用入力シャフト15を左右一対の遊星歯車機構16L、16Rに連結している。
1A 走行駆動系
1B 旋回駆動系
2 車両
5 エンジン
6 走行用油圧ポンプ
7 旋回用油圧ポンプ
8L、8R クローラ
9L、9R 車軸
13 ケース
14 走行用入力シャフト
15 旋回用入力シャフト
16L、16R 遊星歯車機構
22 走行用油圧モータ
23 旋回用油圧モータ
24 走行用ブレーキ
25 旋回用ブレーキ
33 変速機構
50 制御装置(制御手段)
52 アクセルペダル(アクセル操作手段)
55 ブレーキペダル
56 ハンドル
57 超信地旋回モード切替スイッチ
Claims (4)
- 走行用油圧モータの動力によって車両を直進走行させる走行駆動系と、旋回用油圧モータの動力によって前記車両を旋回させる旋回駆動系とを備えた車両に設けられ、前記車両のアクセル操作手段の操作量に応じて、前記走行用油圧モータを駆動する走行用油圧ポンプの流量と、前記走行用油圧ポンプを駆動するエンジンの回転速度とを調節し、前記車両のハンドルの操作量に応じて、前記旋回用油圧モータを駆動する前記旋回用油圧ポンプの流量を調節する制御手段を備えた車両の操向制御システムであって、
前記旋回駆動系により前記車両をその場で旋回させる超信地旋回を行うか否かを切り替える超信地旋回モード切替スイッチを備えており、
前記制御手段は、前記アクセル操作手段の操作状態を検出し、前記アクセル操作手段が操作されていない状態で、前記超信地旋回モード切替スイッチがオフされている第1の条件に該当する場合には、前記ハンドルの操作によって前記旋回用油圧ポンプの流量が変化しないように、前記ハンドルと前記旋回用油圧ポンプとを非連動状態とし、
前記アクセル操作手段が操作されていない状態で、前記超信地旋回モード切替スイッチがオンされている第2の条件に該当する場合には、前記ハンドルの操作量に応じて前記旋回用油圧ポンプの流量を調節し、前記車両を超信地旋回させる、
ことを特徴とする車両の操向制御システム。 - 前記制御手段は、前記第2の条件に該当する場合に、前記ハンドルの操作量に応じて、前記旋回用油圧ポンプの流量とともに、前記エンジンの回転速度を調節する、
ことを特徴とする請求項1に記載の車両の操向制御システム。 - 前記車両は、左右一対の車軸に左右一対の遊星歯車機構がそれぞれ連結されており、
前記走行駆動系は、前記走行用油圧モータの動力を前記左右一対の遊星歯車機構の太陽ギヤに入力し、前記一対の車軸を同方向に同速度で回転させ、
前記旋回駆動系は、前記旋回用油圧ポンプの動力を前記左右一対の遊星歯車機構のリングギヤに入力して互いに逆方向に回転させ、前記一対の車軸の回転速度に差を生じさせる、
ことを特徴とする請求項1または2に記載の車両の操向制御システム。 - 走行用油圧モータの動力によって車両を直進走行させる走行駆動系と、旋回用油圧モータの動力によって前記車両を旋回させる旋回駆動系とを備えた車両に用いられ、前記車両のアクセル操作手段の操作量に応じて、前記走行用油圧モータを駆動する走行用油圧ポンプの流量と、前記走行用油圧ポンプを駆動するエンジンの回転速度とを調節し、前記車両のハンドルの操作量に応じて、前記旋回用油圧モータを駆動する前記旋回用油圧ポンプの流量を調節する車両の操向制御方法であって、
前記旋回駆動系により前記車両をその場で旋回させる超信地旋回を行うか否かを切り替える超信地旋回モード切替スイッチの操作状態を検出するステップと、
前記アクセル操作手段の操作状態を検出するステップと、
を備えており、
前記アクセル操作手段が操作されていない状態で、前記超信地旋回モード切替スイッチがオフされている第1の条件に該当する場合には、前記ハンドルの操作によって前記旋回用油圧ポンプの流量が変化しないように、前記ハンドルと前記旋回用油圧ポンプとを非連動状態とし、
前記アクセル操作手段が操作されていない状態で、前記超信地旋回モード切替スイッチがオンされている第2の条件に該当する場合には、前記ハンドルの操作量に応じて前記旋回用油圧ポンプの流量を調節し、前記車両を超信地旋回させる、
ことを特徴とする車両の操向制御方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015242031A JP2017105387A (ja) | 2015-12-11 | 2015-12-11 | 車両の操向制御システムおよび操向制御方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015242031A JP2017105387A (ja) | 2015-12-11 | 2015-12-11 | 車両の操向制御システムおよび操向制御方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017105387A true JP2017105387A (ja) | 2017-06-15 |
Family
ID=59058495
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015242031A Pending JP2017105387A (ja) | 2015-12-11 | 2015-12-11 | 車両の操向制御システムおよび操向制御方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2017105387A (ja) |
Citations (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5922061U (ja) * | 1982-08-02 | 1984-02-10 | ヤンマー農機株式会社 | クロ−ラ−車輌の走行装置 |
| JPH04257777A (ja) * | 1991-02-08 | 1992-09-11 | Mitsubishi Heavy Ind Ltd | 静油圧駆動式クローラ車両 |
| JPH0594671U (ja) * | 1992-05-29 | 1993-12-24 | 東洋運搬機株式会社 | 人工降雪機 |
| JPH08322368A (ja) * | 1995-06-01 | 1996-12-10 | Honda Motor Co Ltd | 乗用管理機 |
| JPH09207810A (ja) * | 1996-10-18 | 1997-08-12 | Yanmar Agricult Equip Co Ltd | 走行クローラの操向装置 |
| JPH10230756A (ja) * | 1997-02-18 | 1998-09-02 | Komatsu Ltd | 超信地旋回機能付き多軸車両及び左右逆回転機能付き差動装置 |
| JPH1149025A (ja) * | 1997-08-01 | 1999-02-23 | Yanmar Agricult Equip Co Ltd | 作業機における操向制御装置 |
| JP2001163243A (ja) * | 1999-12-06 | 2001-06-19 | Yanmar Agricult Equip Co Ltd | クローラ走行車 |
| JP2001328556A (ja) * | 2000-05-19 | 2001-11-27 | Iseki & Co Ltd | 移動車両の走行ミッション装置 |
| JP2001347965A (ja) * | 2000-06-07 | 2001-12-18 | Iseki & Co Ltd | コンバインの操向装置 |
| US6345674B1 (en) * | 2000-08-23 | 2002-02-12 | Deere & Company | Tracked vehicle steering control system with steering pump feedback |
| JP2003040133A (ja) * | 2001-07-31 | 2003-02-13 | Iseki & Co Ltd | クローラ型作業車両の操向制御装置 |
-
2015
- 2015-12-11 JP JP2015242031A patent/JP2017105387A/ja active Pending
Patent Citations (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5922061U (ja) * | 1982-08-02 | 1984-02-10 | ヤンマー農機株式会社 | クロ−ラ−車輌の走行装置 |
| JPH04257777A (ja) * | 1991-02-08 | 1992-09-11 | Mitsubishi Heavy Ind Ltd | 静油圧駆動式クローラ車両 |
| JPH0594671U (ja) * | 1992-05-29 | 1993-12-24 | 東洋運搬機株式会社 | 人工降雪機 |
| JPH08322368A (ja) * | 1995-06-01 | 1996-12-10 | Honda Motor Co Ltd | 乗用管理機 |
| JPH09207810A (ja) * | 1996-10-18 | 1997-08-12 | Yanmar Agricult Equip Co Ltd | 走行クローラの操向装置 |
| JPH10230756A (ja) * | 1997-02-18 | 1998-09-02 | Komatsu Ltd | 超信地旋回機能付き多軸車両及び左右逆回転機能付き差動装置 |
| JPH1149025A (ja) * | 1997-08-01 | 1999-02-23 | Yanmar Agricult Equip Co Ltd | 作業機における操向制御装置 |
| JP2001163243A (ja) * | 1999-12-06 | 2001-06-19 | Yanmar Agricult Equip Co Ltd | クローラ走行車 |
| JP2001328556A (ja) * | 2000-05-19 | 2001-11-27 | Iseki & Co Ltd | 移動車両の走行ミッション装置 |
| JP2001347965A (ja) * | 2000-06-07 | 2001-12-18 | Iseki & Co Ltd | コンバインの操向装置 |
| US6345674B1 (en) * | 2000-08-23 | 2002-02-12 | Deere & Company | Tracked vehicle steering control system with steering pump feedback |
| JP2003040133A (ja) * | 2001-07-31 | 2003-02-13 | Iseki & Co Ltd | クローラ型作業車両の操向制御装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2567846B1 (en) | Hybrid working vehicle | |
| JP2009241663A (ja) | 作業車 | |
| WO2023149141A1 (ja) | 履帯式作業機械 | |
| CN104389979A (zh) | 带辅助转向功能的液压机械变速箱 | |
| JP2008175294A (ja) | 走行伝動装置 | |
| JP5426731B2 (ja) | 作業車両の変速装置 | |
| JP6602658B2 (ja) | 車両の走行駆動装置 | |
| WO2016189917A1 (ja) | 作業車両 | |
| JP2017105387A (ja) | 車両の操向制御システムおよび操向制御方法 | |
| JP4933387B2 (ja) | トラクタ | |
| JP6567404B2 (ja) | 車両のブレーキシステム | |
| JP4037972B2 (ja) | クローラトラクタの駆動装置 | |
| JP5592539B2 (ja) | 作業車両の変速装置 | |
| JP7001499B2 (ja) | 作業車輌 | |
| JP2006082707A (ja) | セミクローラ型作業車両 | |
| JP4796432B2 (ja) | 作業車両の走行停止制御装置 | |
| JP2016215953A (ja) | クローラトラクタ | |
| JP3498715B2 (ja) | 移動農機の走行伝動装置 | |
| JP6487774B2 (ja) | 作業車両 | |
| JP3878756B2 (ja) | クローラトラクタのステアリング構造 | |
| JP3498709B2 (ja) | 移動農機の走行伝動装置 | |
| JP3368597B2 (ja) | 移動農機の走行伝動装置 | |
| JP3498710B2 (ja) | 移動農機の走行伝動装置 | |
| JP3963833B2 (ja) | 作業車の走行伝動構造 | |
| JPH08216914A (ja) | 作業車両の操向制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180705 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190419 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190507 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190625 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20191008 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191121 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200414 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200611 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20200915 |