<第1発明>
以下、添付図面に従って第1発明の好ましい実施の形態について説明する。
<第1の実施形態>
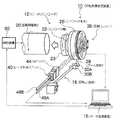
図1は、第1発明に係る回転角度測定装置の構成例を示した全体概略図である。また、図2は、ロータリエンコーダの内部構造を示した断面図である。
図1に示すように、回転角度測定装置10は、工作機械の回転移動軸20の回転角度を測定するロータリエンコーダ12と、ロータリエンコーダ12上に配置される反射ユニット38と、ロータリエンコーダ12とは独立した部分に固定されるレーザ干渉ユニット40と、ロータリエンコーダ12及びレーザ干渉ユニット40が接続されるデータ処理装置18と、から主に構成される。なお、データ処理装置18は、回転移動軸20の回転制御を行う制御装置90との間で各種データの送受信が行われるようになっている。
図1及び図2に示すように、ロータリエンコーダ12は、回転移動軸20に連結されるエンコーダ軸22と、エンコーダ軸22を回転自在に軸支するエンコーダ本体26とから主に構成される。なお、エンコーダ本体26は、任意の回転軸方向において、一定範囲に回転に回転規制された支持基準体である。また、エンコーダ軸22は、支持基準体としてのエンコーダ本体26に連結され、エンコーダ本体26に対し全周回転自在に軸支された回転体である。
エンコーダ軸22の一端(図2の左端)には、エンコーダ本体26の外部に配置された大径部23が設けられている。大径部23は、回転移動軸20をエンコーダ軸22に連結するための取付部であり、ねじなどの固定手段によって回転移動軸20が大径部23に固定される。
エンコーダ軸22は、エンコーダ本体26の内部に設けられる軸受24を介して回転自在に構成されている。すなわち、回転移動軸20にエンコーダ軸22が連結された状態で回転移動軸20が回転すると、エンコーダ軸22が回転移動軸と一体となって回転する。また、エンコーダ本体26は、エンコーダ軸22の周りで回転自在に構成されており、後述するように回転止治具16によって回転可能範囲が所定範囲に規制されている。
エンコーダ軸22には、図2に示すように、目盛板34が同軸状態で固定されている。目盛板34は、エンコーダ本体26の内部に配置されており、目盛板34の周囲には周方向に沿って所定の角度間隔で複数の目盛が刻まれている。また、目盛板34の外周部には、目盛板34を挟み込むように配置されたU字状の読み取りヘッド36が設けられている。読み取りヘッド36は、目盛板34の目盛を光学的又は磁気的に読み取る検出センサを備え、目盛板34の回転角度(回転変位量)を示す回転角度データをデータ処理装置18に対して出力する。なお、読み取りヘッド36は、エンコーダ本体26の内部に固定されており、エンコーダ本体26と一体となって回転する。
エンコーダ本体26の外周面には、径方向外側に向かって伸びる棒状のアーム部材28が設けられている。すなわち、アーム部材28は、エンコーダ本体26からエンコーダ軸22に対して垂直な方向に突設されている。なお、アーム部材28が設けられる方向は、エンコーダ軸22に対して垂直な方向な方向に限らず、所定角度斜めに傾いた方向であってもよい。アーム部材28は、回転止治具16の先端に所定の間隔をあけて並設される一対の回転規制部材38A、38Bの間に介挿されており、エンコーダ本体26の回転可能範囲は所定範囲に規制されている。なお、回転止治具16は、エンコーダ本体26とは異なる部分に固定されている。
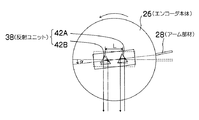
図3は、反射ユニット38とレーザ干渉ユニット40との配置関係を示した概略図である。図3に示すように、エンコーダ本体26上に固定されている反射ユニット38には、2個のコーナーキューブ42A、42Bが並べて配設されている。各コーナーキューブ42A、42Bは、後述するレーザ干渉ユニット40の光ヘッド44から平行に照射された第1及び第2のレーザ光を逆方向に反射する反射部材である。反射ユニット38は、エンコーダ本体26と一体となって回転する。すなわち、エンコーダ本体26の回転角度は反
射ユニット38の回転角度と等しく、例えば図4に示すように、エンコーダ本体26が反時計方向にα(但し、α>0とする。)度回転すると、反射ユニット38も反時計方向にα度だけ回転する。
図3に示すように、レーザ干渉ユニット40は、反射ユニット38に対向する位置に配置される光ヘッド(角度測定干渉ヘッド)44と、光ヘッド44に第1の光ファイバ48Aを介して接続されるレーザ光源50と、光ヘッド44に第2の光ファイバ48Bを介して接続される光検出器46と備えて構成される。なお、レーザ干渉ユニット40は、エンコーダ軸22及びエンコーダ本体26に接触しない位置を基準として、エンコーダ本体26の回転角度を検出する非接触式角度検出手段である。
レーザ光源50としては、波長安定性に優れたHe−Neレーザ光源が好適であるが、波長安定化が行われなくても、測定精度に大きな影響は大きな影響を与えないことから、他のレーザ光源を用いることも可能である。
光ヘッド44には偏光ビームスプリッタ52及び直角プリズム54が隣接して配置されている。レーザ光源50から発光されたレーザ光は、第1の光ファイバ48Aを介して光ヘッド44に入射されると、まず始めに、偏光ビームスプリッタ52に入射され、偏光ビームスプリッタ52で2つのレーザ光に分割される。分割された一方のレーザ光(第1のレーザ光)は、第1のコーナーキューブ42Aに入射して逆方向に戻り、再び偏光ビームスプリッタ52に入射する。分割されたもう一方のレーザ光(第2のレーザ光)は、直角プリズム54で反射され、第1のレーザ光の光軸と平行な平行光となって第2のコーナーキューブ42Bに入射して逆方向に戻り、再び直角プリズム54及び偏光ビームスプリッタ52で反射されて、第1のコーナーキューブ42Aで反射された光と干渉し、干渉したレーザ光(干渉光)は第2の光ファイバ48Bを介して光検出器46に対して出力される。
光検出器46は、光ヘッド44から出力される干渉光に基づき、各コーナーキューブ42A、42Bで反射されて戻ってきた光(第1及び第2のレーザ光)の光路長差(位相差)を検出し、検出した光路長差を示す光路長差データをデータ処理装置18に対して出力する。なお、光路長差の検出原理は公知であるため、ここでは詳しい説明を省略するが、エンコーダ本体26の微小な回転運動に伴って反射ユニット38の回転角度が変化すると、第1のコーナーキューブ42Aで反射されて戻る経路と第2のコーナーキューブ42Bで反射されて戻る経路の光路長が変化する。このとき、干渉光の縞数が変化するので、この干渉光の縞数の変化をカウントすることにより、第1及び第2のレーザ光の光路長差を求めることができる。
また、光路長差の検出方式としては、例えば、マイケルソン干渉計によるフリンジカウント方式やヘテロダイン方式などを用いることが可能である。ヘテロダイン方式の場合、レーザ光源50は直交2周波の必要があり、例えば、ゼーマンレーザやAOM(音響光学素子)が使われる。
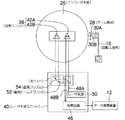
図5は、データ処理装置18の構成を示した機能ブロック図である。図5に示すように、データ処理装置18は、入出力IF56、メモリ58、制御部60、及びデータ処理部62を備えて構成される。
入出力IF56は、操作者による入力操作に用いられるキーボードやマウス、タッチパネルなどの入力装置72や各種情報の表示出力に用いられるモニタやプリンタなどの出力装置74との間でデータ入出力を行うためのインターフェースである。
メモリ58は、データ処理装置18の各部を動作させるためのプログラムや各種データが記憶される記憶部であり、ROMやRAMなどにより構成される。制御部60は、データ処理装置18の各部の制御を行う。
データ処理部62は、回転移動軸20の回転角度の補正データを生成するための処理部であり、エンコーダ軸回転角度算出部64、エンコーダ本体回転角度算出部66、回転角度補正部68、及び補正データ生成部70を備えて構成される。
エンコーダ軸回転角度算出部64は、ロータリエンコーダ12(読み取りヘッド36)から出力された回転角度データを取得し、取得した回転角度データに基づいてエンコーダ軸22の回転角度θ1を算出する。エンコーダ軸回転角度算出部64で算出された回転角度θ1は、回転角度補正部68に対して出力される。
エンコーダ本体回転角度算出部66は、レーザ干渉ユニット(光検出器46)から出力された光路長差データを取得し、取得した光路長差データに基づいてエンコーダ本体26の回転角度θ2を算出する。エンコーダ本体回転角度算出部66で算出された回転角度θ2は、回転角度補正部68に対して出力される。
回転角度補正部68は、エンコーダ本体回転角度算出部66で算出された回転角度θ2に基づいて、エンコーダ軸回転角度算出部64で算出された回転角度θ1を補正する。具体的には、回転角度θ1に回転角度θ2を加算することにより、回転角度θ1の補正を行う。回転角度補正部68で補正された補正後の回転角度(補正回転角度)θ1´は、補正データ生成部70に対して出力される。
補正データ生成部70は、回転角度補正部68から出力された補正回転角度θ1´に基づいて、回転移動軸20の回転角度(設定角度)と実際の回転角度(補正回転角度θ1´)との誤差が打ち消されるように補正データを生成する。補正データ生成部70で生成された補正データは、工作機械の制御装置90又は出力装置74に対して出力される。
なお、補正データ生成部70は、制御装置90から補正データを回転角度の補正量に変換するための換算係数を取得し、取得した換算係数に応じて補正データを生成する。例えば回転角度の補正量が1度である場合、補正データ生成部70は、制御装置90から取得した換算係数が0.1のときは補正データとして10を出力し、換算係数が1のときは補正データとして1を出力する。
ここで、本実施形態で行われる回転角度の補正原理について説明する。
図6は、エンコーダ軸22とエンコーダ本体26との相対的な位置関係を示した概略図である。ここでは、図6に示すように、エンコーダ軸22の中心Oから所定距離離れた位置に回転中心Cが配置されるものとする。なお、回転中心Cは回転移動軸20の軸心と一致している。また、図6(a)の状態を初期位置とし、そのときの回転移動軸20の回転角度θを0度とする。回転角度θは、反時計周り方向を正方向、その反対側の時計周り方向を負方向とする。
まず、回転移動軸20が初期位置から90度回転したとき、図6(b)に示すように、エンコーダ軸22の中心Oは回転中心Cに対して上側に移動する。このとき、エンコーダ本体26は、アーム部材28の先端部分が回転止治具16の一対の回転規制部材38A、38Bによって(図6における上下方向の)動きが規制されているので、その先端部分を中心として振り子のように時計周り方向に微小角度回転する。これにより、エンコーダ本体26は中心Oの周りを−α度だけ回転した位置に移動する。このため、ロータリエンコ
ーダ12(読み取りヘッド36)からは、エンコーダ軸22が実際に回転した回転角度よりもα度だけ多い回転角度、すなわち、(90+α)度を示す回転角度データが出力される。
次に、回転移動軸20が初期位置から180度回転したとき、図6(c)に示すように、エンコーダ軸22の中心Oは回転中心Cに対して左側に移動する。この移動に伴って、エンコーダ本体26は初期位置と同じ状態(図6(a)の状態)となる。したがって、ロータリエンコーダ12からは、エンコーダ軸22が実際に回転した回転角度、すなわち、180度を示す回転角度データが出力される。
次に、回転移動軸20が初期位置から270度回転したとき、図6(d)に示すように、エンコーダ軸22の中心Oは回転中心Cに対して下側に移動する。この移動に伴って、エンコーダ本体26は、アーム部材28の先端部分を中心として反時計周り方向に微小角度回転する。これにより、エンコーダ本体26は中心Oの周りをα度だけ回転した位置に移動する。このため、ロータリエンコーダ12からは、エンコーダ軸22が実際に回転した回転角度よりもα度だけ少ない回転角度、すなわち、(270−α)度を示す回転角度データが出力される。
次に、回転移動軸20が初期位置から360度回転したとき、図6(e)に示すように、エンコーダ本体26は初期位置と同じ状態(図6(a)の状態)となる。したがって、ロータリエンコーダ12からは、エンコーダ軸22が実際に回転した回転角度、すなわち、360度を示す回転角度データが出力される。
すなわち、本実施形態では、回転移動軸20に対してエンコーダ軸22が軸ずれした状態で連結されたとき、エンコーダ本体26は、アーム部材28の先端部分、すなわち、一対の回転規制部材38A、38Bによって挟持される部分を支点(中心)として、エンコーダ軸22の回転角度に応じて振り子のように揺動し、偏心誤差に相当する角度分だけエンコーダ軸22の周りを回転可能に構成される。このため、ロータリエンコーダ12から出力される回転角度データに含まれる偏心誤差はエンコーダ本体26の回転角度から求めることが可能となる。したがって、エンコーダ本体26の回転角度に基づいてエンコーダ軸22の回転角度を補正することにより、エンコーダ軸22の軸偏心に起因する偏心誤差の影響をキャンセルすることができ、エンコーダ軸22の回転角度を精度良く検出することが可能となる。
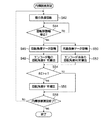
次に、本実施形態の回転角度測定装置10を用いた回転角度測定方法について説明する。図7は、本実施形態の回転角度測定方法の手順の一例を示したフローチャート図である。
まず始めに、回転角度測定装置10を用いて測定を行うための準備作業を行う(ステップS10)。具体的には、回転移動軸20に対してエンコーダ軸22を連結する。また、エンコーダ本体26上に反射ユニット38を取り付け、これに対向する位置に光ヘッド44を固定する。光ヘッド44には、第1及び第2の光ファイバ48A、48Bを介してレーザ光源50及び光検出器46を接続する。そして、ロータリエンコーダ12及びレーザ干渉ユニット40を不図示のケーブルを介してデータ処理装置18に接続する。また、エンコーダ本体26の外周面から突設されるアーム部材28を回転止治具16の一対の回転規制部材38A、38Bの間に介挿する。
次に、データ処理装置18の電源をオンにして、回転角度測定用プログラムを起動する(ステップS12)。その際、データ処理装置18以外の各部の電源もオンにして、測定を開始できる状態にしておく。
次に、回転角度の測定条件の設定を行う(ステップS14)。具体的には、回転角度の測定条件として、計測開始位置、計測終了位置、計測間隔、データ取得方法などを設定する。例えば、計測開始位置を0度、計測終了位置を360度、計測間隔を45度として設定した場合、回転移動軸20の1周分、すなわち360度の範囲にわたって45度毎に9個の測定点が計測位置となる。また、計測間隔の代わりに測定点の個数を入力してもよいし、各測定点の位置を示す回転角度を直接入力できるようにしてもよい。データ取得方法としては、各測定点の測定回数や各測定点の移動シーケンス(測定開始位置から測定終了位置に向かう方向選択や繰り返し方法)などが含まれる。これらの測定条件は、データ処理装置18に接続される入力装置72から入力される。
次に、回転移動軸20を計測開始位置まで回転させる(ステップS16)。続いて、回転移動軸20が停止したか否か判断が行われ(ステップS18)、回転移動軸20が停止したと判断されるまで待機状態となる。回転移動軸20が停止したと判断された場合には、次のステップS20及びステップS24に進む。
回転移動軸20が停止した後、エンコーダ軸回転角度算出部64は、ロータリエンコーダ12から出力される回転角度データを取得し(ステップS20)、取得した回転角度データに基づいてエンコーダ軸22の回転角度θ1を算出する(ステップS22)。
また、ステップS20及びステップS22の各処理と並行して、エンコーダ本体回転角度算出部66は、光検出器46から出力される光路長差データを取得し(ステップS24)、取得した光路長差データに基づいてエンコーダ本体26の回転角度θ2を算出する(ステップS26)。
このとき、エンコーダ本体26の回転角度θ2の算出方法としては、図4に示すように、2個のコーナーキューブ42A、42Bの間隔(中心間距離)をLとし、レーザ干渉ユニット40(光検出器46)で検出された光路長差をxとしたとき、次式(1)によって求められる。
θ2=sin-1(x/2L) ・・・(1)
なお、光路長差xは2Lに比べて十分に小さいことから、次式(2)を用いてもよい。
θ2≒x/2L ・・・(2)
次に、回転角度補正部68は、エンコーダ本体26の回転角度θ2が閾値εよりも大きいか否かの判断を行う(ステップS28)。そして、エンコーダ本体26の回転角度θ2が閾値εよりも大きい場合には、ステップS26で算出されたエンコーダ本体26の回転角度θ2に基づき、ステップS22で算出されたエンコーダ軸22の回転角度θ1を補正する(ステップS30)。具体的には、エンコーダ軸22の回転角度θ1にエンコーダ本体26の回転角度θ2を加算することにより、エンコーダ軸22の軸偏心に起因する偏心誤差が取り除かれた補正後の回転角度θ1’を算出し、現在の測定点(計測位置)における割り出し角度を補正後の回転角度θ1’とし、次のステップS32に進む。
一方、エンコーダ本体26の回転角度θ2が閾値ε以下の場合には、エンコーダ軸22の回転角度θ1の補正は行わずに、現在の測定点における割り出し角度を回転角度θ1とし、次のステップS32に進む。
なお、図7に示した方法では、エンコーダ本体26の回転角度θ2の大きさに応じてエンコーダ軸22の回転角度θ1の補正は行わないようにしているが、これに限らず、エンコーダ本体26の回転角度θ2の大きさにかかわらず、全ての測定点についてエンコーダ
軸22の回転角度を補正するようにしてもよい。ただし、図7に示した方法によれば、全ての測定点についてエンコーダ軸22の回転角度θ1を補正しなくてもすむので、全ての測定点についてエンコーダ軸22の回転角度を補正する態様に比べて、回転角度の割り出し精度の測定に伴う処理を簡略化することが可能となる。特に、エンコーダ本体26の回転角度θ2が測定範囲の全体にわたって十分に小さく無視できる場合には、全ての測定点についてエンコーダ軸22の回転角度θ1を補正することが不要となり、各測定点におけるエンコーダ軸22の回転角度θ1をそのまま割り出し角度として利用することが可能となる。
次に、全ての測定点の測定が指定回数行われたか否かが判断される(ステップS32)。全ての測定点の測定が指定回数行われていない場合には、ステップS14で設定されたデータ取得条件に従って回転移動軸20を次の測定点まで回転させる(ステップS34)。そして、全ての測定点の測定が指定回数行われるまでステップS18以降の処理を繰り返す。ステップS32にて全ての測定点の測定が指定回数行われたと判断された場合には、次のステップS36に進む。
次に、補正データ生成部70は、各測定点の回転角度(設定角度)と割り出し角度(すなわち、ステップS30で算出された補正回転角度θ1’)との誤差を算出し、この誤差が打ち消されるように回転角度の補正量を示す補正データを生成し(ステップS36)、工作機械の制御装置90又は出力装置74に補正データを出力する(ステップS38)。
以上のとおり、本実施形態によれば、回転移動軸20に対してエンコーダ軸22が軸ずれした状態で取り付けられた場合でも、エンコーダ本体26のエンコーダ軸22周りにおける絶対的な回転角度を検出し、その検出された回転角度に基づいてロータリエンコーダ12によって検出された回転角度が補正される。これにより、ロータリエンコーダ12によって検出された回転角度、すなわち、エンコーダ軸22の回転角度に含まれる偏心誤差を取り除くことが可能となる。
特に本実施形態では、レーザ干渉ユニット40を用いてエンコーダ本体26の回転角度が検出されるため、回転移動軸20に対するエンコーダ軸22の軸ずれが微量である場合でも、エンコーダ本体26の微小な回転角度を高精度に検出することができる。したがって、エンコーダ軸22の回転角度に含まれる偏心誤差を確実に取り除くことができる。その結果、回転移動軸20の回転角度の割り出し精度を向上させることができる。
また、本実施形態では、エンコーダ軸22が軸ずれした状態で取り付けられた場合でも偏心誤差による影響を取り除くことができるため、ロータリエンコーダ単独で測定が行われる場合に比べて、回転移動軸20に対するエンコーダ軸22の許容偏心量(最大偏心量)を拡大することができる。このため、ロータリエンコーダ12の取り付け作業が簡単となり、作業者の負担が大幅に軽減し、作業効率が向上する。
また、本実施形態では、エンコーダ本体26の回転可能範囲は、レーザ干渉ユニット40によってエンコーダ本体26の回転角度を精度良く検出できる範囲(例えば±10度前後)に制限されていることが好ましい。なお、エンコーダ本体26の回転可能範囲は、回転止治具16に設けられる一対の回転規制部材38A、38Bの間隔を調整することによって変化させることができる。これにより、エンコーダ本体26の回転角度を高精度に検出することができ、偏心誤差を確実に取り除くことが可能となる。
また、本実施形態によれば、回転移動軸20の回転開始時ないしは回転停止時に伴う慣性力により、エンコーダ軸22の回転につられてエンコーダ本体26が共回りすることによって、ロータリエンコーダ12によって検出された回転角度に微小な角度ずれ(以下、
「初期オフセット誤差」という。)が生じた場合でも、上記補正を行うことにより、偏心誤差と初期オフセット誤差の影響を同時にキャンセルすることができる。
なお、本実施形態では、エンコーダ本体26の絶対的な回転角度を検出する手段として、レーザ干渉ユニット40を用いているが、これに限定されず、補正対象となる誤差の大きさ(オーダ)に応じて各種方式(例えば、水準器やオートコリメータなど)を適宜採用することができる。但し、本実施形態の如く、レーザ干渉ユニット40を用いてエンコーダ本体26の回転角度を検出する態様が好ましく、偏心誤差や初期オフセット誤差の影響を受けることなく、回転移動軸20の回転角度の割り出し精度を向上させることができる。
<第2発明>
次に、第2発明の実施形態について説明する。以下、上述した実施形態と共通する部分については説明を省略し、本実施形態の特徴的部分を中心に説明する。
図8は、第2発明の実施形態に係る回転角度測定方法の手順の一例を示したフローチャート図である。図8中、図7と共通する処理には同一の符号を付し、その説明を省略する。なお、図8に示したフローチャートは、第1発明の実施形態で示した回転角度測定装置10を用いて行われる。
図8に示すように、本実施形態では、ステップS26で算出されたエンコーダ本体26の回転角度θ2の大きさに応じて、ステップS22で算出されたエンコーダ軸22の回転角度θ1を補正した後(ステップS28、S30)、現在の測定点の周辺部を計測対象とした内挿誤差測定が行われる(ステップS40)。
ここで、ステップS40で行われる内挿誤差測定について説明する。図9は、内挿誤差測定で行われる処理内容を示したフローチャート図である。
まず始めに、内挿誤差の測定処理が開始されると、回転移動軸20を微小角度回転させる(ステップS42)。ここでは、回転移動軸20を回転させることが可能な最小単位角度だけ回転させる。なお、ステップS42で回転させる微小角度は、最小単位角度に限定されず、少なくとも内挿誤差の周期、すなわち、回転移動軸20に設けられている歯車の一歯あたりの回転角度(回転ピッチ)よりも小さい角度であればよく、内挿誤差の周期の4分の1以下の角度であることが好ましい。
ステップS44からステップS54までの処理については、図7及び図8に示したステップS18からステップS30までの処理と同様にして行われる。すなわち、回転移動軸20が停止した後、ロータリエンコーダ12及びレーザ干渉ユニット40から取得した回転角度データ及び光路長差データに基づいてエンコーダ軸22の回転角度θ1及びエンコーダ本体26の回転角度θ2を算出し、エンコーダ本体26の回転角度θ2の大きさに応じてエンコーダ軸22の回転角度θ1の補正を行う(ステップS44〜S56)。なお、上述した実施形態と同様に、エンコーダ本体26の回転角度θ2の大きさにかかわらず、エンコーダ本体26の回転角度θ2に基づいてエンコーダ軸22の回転角度θ1を補正するようにしてもよい。
次に、内挿誤差測定が終了したか否かが判断される(ステップS58)。ここでは、内挿誤差測定が開始された位置(測定点)から現在の位置までの回転範囲が所定の閾値を超えているか否かを判断することにより、内挿誤差測定が終了したか否かを判断する。このとき、判断の基準となる閾値(角度範囲)は、検出対象とする内挿誤差の周期と等しいか、それよりも広い範囲とする。なお、閾値を大きく設定しすぎると内挿誤差の測定に要す
る時間が長くなることから、内挿誤差の周期に応じて適正な範囲に設定することが望ましい。
内挿誤差測定が終了していないと判断される場合には、ステップS42に戻って回転移動軸20を微小角度回転させた後、ステップS44以降の処理を繰り返す。一方、内挿誤差測定が終了したと判断される場合には、図8のステップS32に戻る。
図8のステップS32では、全ての測定点の測定が指定回数行われるまでステップS18からステップS40までの処理が繰り返される(ステップS32)。これにより、例えば図10の上段に示すように、各測定点毎に測定された内挿誤差が得られる。なお、図10では、45度毎に設定された複数の測定点(0度、45度、90度、135度)の周辺部で測定された内挿誤差を一例として示している。
次に、補正データ生成部70は、第1の実施形態と同様にして各測定点の回転角度(設定角度)と割り出し角度(ステップS30で算出された補正回転角度θ1’、又は、補正前の回転角度θ1)との誤差を算出し、この誤差が打ち消されるように回転角度の補正量を示す補正データを生成する(ステップS34)。
その際、補正データ生成部70は、各測定点で得られた内挿誤差に基づいて、内挿誤差がキャンセルされるように補正データを生成する。具体的には、例えば図10の下段に示すように、各測定点で得られた内挿誤差の平均値を内挿誤差補正値として内挿誤差の周期毎に補正データに反映させる。
そして最後に、工作機械の制御装置90又は出力装置74に補正データを出力する(ステップS36)。
以上のとおり、本実施形態によれば、回転移動軸20に対してエンコーダ軸22が軸ずれした状態で連結される場合でも、軸ずれに起因する偏心誤差の影響を受けることなく、回転移動軸20に設けられる歯車に起因する内挿誤差を精度良く測定することができる。これにより、内挿誤差を補正するための補正データを生成することが可能となり、この補正データを用いて回転移動軸20の回転角度を補正することにより、内挿誤差の影響を受けることなく、回転移動軸20の回転角度の割り出し精度を向上させることが可能となる。また、ロータリエンコーダ12の簡単な取り付けが可能となる。
なお、本実施形態では、ステップS14で設定された全ての測定点を対象にして内挿誤差の測定が行われているが、これに限らず、これらの測定点のうち一部の測定点を対象にして内挿誤差を測定するようにしてもよい。
<第3発明>
次に、第3発明の実施形態について説明する。以下、上述した各実施形態と共通する部分については説明を省略し、本実施形態の特徴的部分を中心に説明する。
第1及び第2発明の実施形態では、回転移動軸20の回転が停止してから回転角度を測定する静的測定(スタッティック測定)が行われるのに対し、第3発明の実施形態では、回転移動軸20を一定の回転速度で等速回転させながら所定の時間間隔毎に回転角度を検出する動的測定(ダイナミック測定)が行われる。
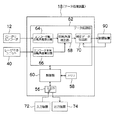
図11は、第3発明の実施形態に係るデータ処理装置18の構成を示した機能ブロック図である。図11中、図5と共通する構成要素には同一の符号を付し、その説明を省略する。
図11に示すように、データ処理装置18は、同期信号を生成する同期信号を生成する同期信号生成部76を備えている。同期信号生成部76の同期信号の発生回数、発生間隔などは制御部60により制御される。同期信号生成部76で生成された同期信号は、ロータリエンコーダ12及びレーザ干渉ユニット40に対して出力される。
図12は、第3発明の実施形態に係る回転角度測定方法の手順の一例を示したフローチャート図である。図12中、図7又は図8と共通する処理には同一の符号を付し、その説明を省略する。
図12に示すように、回転移動軸20を計測開始位置まで回転させた後(ステップS16)、回転移動軸20の回転を開始する(ステップS50)。このとき、回転移動軸20を一定の回転速度で等速回転させる。また、同期信号生成部76は、ロータリエンコーダ12及びレーザ干渉ユニット40に対して同期信号を出力する。なお、同期信号生成部76では、所定の時間間隔毎に検出タイミングを示す同期信号が生成される。
次に、ロータリエンコーダ12及びレーザ干渉ユニット40は、同期信号生成部76から出力された同期信号に基づいて、所定時間が経過するまで待機した後(ステップS52)、同一タイミングで回転角度及び光路長差の検出を行い、これらに対応する回転角度データ及び光路長差データを出力する。
ステップS20からステップS30までの処理については、上述した実施形態と同様であり、エンコーダ軸回転角度算出部64及びエンコーダ本体回転角度算出部66は、ロータリエンコーダ12及びレーザ干渉ユニット40から計測時間間隔毎に出力される回転角度データ及び光路長差データを取得すると、取得した回転角度データ及び光路長差データに基づいてエンコーダ軸22の回転角度θ1及びエンコーダ本体26の回転角度θ2を算出する。そして、回転角度補正部68は、エンコーダ本体26の回転角度θ2の大きさに応じてエンコーダ軸22の回転角度θ1の補正を行う。なお、上述した実施形態と同様に、エンコーダ本体26の回転角度θ2の大きさにかかわらず、エンコーダ本体26の回転角度θ2に基づいてエンコーダ軸22の回転角度θ1を補正するようにしてもよい。
次に、全ての測定が終了したか否かが判断される(ステップS32)。ここでは、回転移動軸20が計測終了位置まで移動したか否かの判断が行われる。回転移動軸20が計測終了位置まで移動していない場合には、ステップS20からからステップS28までの処理が繰り返される。回転移動軸20が計測終了位置まで移動した場合には、次のステップS36に進む。
ステップS36で行われる補正データの生成処理は上述した実施形態と同様であり、計測が行われた各位置における回転角度(設定角度)と割り出し角度との誤差を算出し、この誤差が打ち消されるように回転角度の補正量を示す補正データを生成する(ステップS36)。そして、ステップS36で生成した補正データを工作機械の制御装置90又は出力装置74に出力する(ステップS38)。
以上のとおり、本実施形態では、回転移動軸20を一定の回転速度で等速回転させながら、ロータリエンコーダ12及びレーザ干渉ユニット40は、同期信号生成部76から出力される同期信号に従って、所定の時間間隔毎に同一タイミングで回転角度及び光路長差を検出する動的測定(ダイナミック測定)が行われる。したがって、計測範囲にわたって連続的に回転角度の測定を行うことができるため、局所的に発生する角度誤差を確実に検出することが可能となる。これにより、回転移動軸20の回転角度の割り出し精度を向上させることができる。
<第4発明>
次に、第4発明の実施形態について説明する。以下、上述した各実施形態と共通する部分については説明を省略し、本実施形態の特徴的部分を中心に説明する。
図14は、第4発明の実施形態に係る回転止治具の先端部分の構成例を示した構成図である。図14中、図3と共通する構成要素には同一の符号を付し、その説明を省略する。
図14に示すように、回転止治具16の先端に配置される回転規制部材38A又は38Bには、アーム部材28の変位を検出する変位センサ140が設けられている。変位センサ140は、アーム部材28の変位を検出すると、その検出結果をデータ処理装置18に対して出力する。
変位センサ140としては、アーム部材28の変位を検出することができるものであれば各種公知のセンサを適用することが可能であり、例えば、静電容量式、渦電流式、光学式(3角測距式、反射光量式)、レーザ式、接触式(差動トランス式、プランジャ式、歪ゲージを用いた方式)を使用することができる。また、光学スケールを用いてアーム部材28の変位を検出してもよい。これらの方式については公知の構成が適用されるため、ここでは説明を省略する。
図15は、第4発明の実施形態に係るデータ処理装置の構成を示したブロック図である。図15中、図5と共通する構成要素には同一の符号を付し、その説明を省略する。
図15に示すように、変位センサ140で検出されたアーム部材28の変位は、エンコーダ本体回転角度算出部66に入力される。エンコーダ本体回転角度算出部66は、変位センサ140で検出されたアーム部材28の変位に基づき、エンコーダ本体26の回転角度を算出する。
ここで、エンコーダ本体26の回転角度をα、アーム部材28の変位をd、エンコーダ本体26の回転中心からアーム部材28の先端部分(変位計測位置)までの距離をlとしたとき、エンコーダ本体26の回転角度αは、次式α=sin−1(d/l)により求めることができる。他の処理については、上述した各実施形態と同様に行われる。
以上のとおり、本実施形態によれば、エンコーダ本体26のアーム部材28の変位を検出する変位センサ140を備えたので、変位センサ140によって検出されるアーム部材28の変位からエンコーダ本体26の回転角度を求めることができる。したがって、回転移動軸20の回転開始時ないしは回転停止時に伴う慣性力により、エンコーダ軸22の回転につられてエンコーダ本体26が共回りしてしまう場合でも、上述した各実施形態に比べてより簡易な構成で、エンコーダ本体26の回転角度に基づいてロータリエンコーダ12によって検出された回転角度を補正することができ、初期オフセット誤差による影響をキャンセルすることができる。これにより、回転移動軸20の回転角度の割り出し精度を向上させることができる。
なお、上述した各実施形態では、ロータリエンコーダ12の出力方式は特に限定されず、測定開始位置からの回転変位量(回転角度)に応じたパルス信号(相対角度信号)を出力するインクリメンタル方式でもよいし、基準点に対して絶対的な角度位置に対応したコード信号(絶対角度信号)を出力するアブソリュート方式でもよい。
また、ロータリエンコーダ12の検出方式は特に限定されず、光学式、磁気式、レーザ式、機械式、光ファイバ式、静電容量式などの各種方式のものを採用することができる。
また、ロータリエンコーダ12には、エンコーダ軸22と回転移動軸20を機械的に連結するカップリング部材が設けられていてもよい。カップリング部材としては、回転移動軸20と回転移動軸20との間の軸ずれを吸収可能なフレキシブルカップリングが好ましい。その際、フレキシブルカップリングの種類に応じて、吸収可能な偏心量が異なることから、測定精度に応じて使用するフレキシブルカップリングを選定する必要がある。
また、上述した各実施形態では、相対角度検出手段としてロータリエンコーダ12が用いられた構成を一例として示したが、本発明はこれに限らず、例えば、レゾルバを用いた角度センサを用いてもよい。なお、レゾルバを用いた角度センサについては公知のものが適用されるため、ここでは説明を省略する。
以上、本発明の回転角度測定装置及び回転角度測定方法について詳細に説明したが、本発明は、以上の例には限定されず、本発明の要旨を逸脱しない範囲において、各種の改良や変形を行ってもよいのはもちろんである。
最後に、本発明の課題の1つとして、回転体の回転角度をリアルタイムに精度良く検出することもある。その上で、必要な前提としては、回転体の精度を精度良く検出する上では、次の前提条件を踏まえて検出する必要がある。本検出するステップが一つでも欠けると全体として意味のないものになってしまう。
回転体の回転角度を精度良く測定する上では、回転体の外側から回転体の回転角度を検出することは不可能である。なぜならば、回転体は回転に伴う回転系全体の微小変位や回転系の振動などが発生するため、外部から検出しようとしても、それが微小変位や振動によるものか、真の回転による角度変化であるかの見分けがつかないからである。
例えば、レーザ光で角度検出する方法の場合、レーザ光を照射し、回転角度を測定する対象が回転規制されておらず、まさに回転体に対して、回転体の軸ないしは軸受け部分より離れた点から回転体に向けて測定しているため、回転体自身の振動や微小平行変位など、回転以外の運動による誤差も回転とみなしてしまうことがある。よって、回転系以外の地点から回転体へ光を投射して検出する機構は、高精度に回転角を検出する機構として意味をなさないものになる。
よって、回転系の回転角度を測定するためには、まず、基準となる支持体(支持基準体)が回転体と同じ回転系に属する必要がある。すなわち、回転体が支持基準体に対して軸支された状態、つまり、軸と軸受けによって結合された状態で回転角度を測定しなくてはならない。同じ軸によって結合された状態で回転を測定する場合、すなわち、同一の回転系に属しながら回転角度を検出する場合は、支持基準体と回転体は同じ回転系であるため、回転体の回転に伴う振動や回転系の変位はキャンセルされ、相対的に精度良く回転角度のみを測定することが可能となる。
さらに、回転体の回転角度を求めるためには、微小ピッチで連続したエンコードを等間隔で刻んでいる必要がある。等間隔で刻まれたエンコードからパルスが発せられ、それぞれの回転角度を読み取ることができる。例えば、エンコードピッチは直径50mmの部分に20μmピッチ程度で刻まれているものなどがある。これは全周で刻まれている必要がある。
全周を等間隔で微小ピッチでエンコードを刻むことによって、多少偏心があったとしても、パルスの等間隔性とパルスの連続性から一周させることで校正(較正)することが可能となる。すなわち、エンコーダが中心からずれて固定されていたとしても、角度のずれ
方はサインカーブを描くようにずれて一周させることで元の位置に戻るので、パルスの等間隔性と微小パルスの連続性から回転角を正確に修正することが可能となる。
また、一周にわたって円板ないしはリング状のエンコーダを形成することで、軸周りにおいて摩擦熱の影響があったとしても、熱は軸と軸受けの間で発生するため、軸に対して円対称、半径方向に分布するため、エンコーダ内で熱応力におけるせん断的な熱応力は働かない。すなわち、熱応力によって変形する際に、ポアソン比の影響を受けることなく、円周方向は同じ角度を維持することが可能となる。
一方、同じ回転系で測定する場合、回転体内で測定すれば全て精度良く検出できるかといえば、そうではない。それは、回転体内で測定する場合、回転規制している部分に対して、少なからず軸と軸受けの間で発生する摩擦力、また、急に回転するないしは急に静止することによって生まれる慣性力などの力が加わるからである。こうした力が加わる系においては、回転の基準になる基準部分が、摩擦力、慣性力などによって変位してしまう。そのため、回転の基準位置がどの程度角度が変化したかを検出しておかなければならない。
これは同じ回転系にいる状態では測定することはできない。なぜなら、同一回転系の中ではどうしても摩擦力、慣性力が作用してしまうからである。
例えば、水準器を用いて回転体の回転角度を検出しようとすると、その水準器は同じ回転系に取り付けなければならない。このような場合、水準器は回転体の摩擦力や慣性力を受けることになる。例えば、回転体が急激に回転駆動する場合、又は回転体が急激に静止する場合、その摩擦力・慣性力の影響をまともに受ける。
その結果、リアルタイムに、かつ即座に角度を検出することは不可能となる。なぜならば、回転体に接触して測定する場合、多かれ少なかれ、摩擦力、慣性力の影響を受けるためである。また、水準器は、位置を即座に検知するのではなく、重力によって静止する部分を基準に水準を定義する。すなわち、重力のみが作用する力学系のバランスで位置が決まることになる。こうした場合、回転体が回転することに伴う摩擦力や慣性力が働く系において、重力で基準を設定しても、リアルタイムに、すなわち即座に角度を検出できないことは自明である。
また、仮にリアルタイムに、かつ即座に角度を検出できなかったとして、リアルタイムではなくても水準器の場合、正確な角度を検出することはできない。
なぜならば、回転体の回転によって摩擦力や慣性力が作用し、その結果、理想的な水準位置でない位置で止まった場合において、理想的な水準位置に戻すために、逆回転させる必要があるからである。逆回転させて戻した場合、正回転した際の角度ずれの量と逆回転させて補正するとした場合の角度戻しの量は、厳密には異なる。これは回転体を駆動させるためのギアの影響があるからであり、ギアのバックラッシの影響やギア一つ一つのかみ合わせによって生じる内挿誤差の影響により、回転角度は行きと帰りで微小に変化するからである。そうしたことから、水準器のような重力のバランスで位置が決まる方式では、逆戻りする工程を必要とするため、本発明の課題である、即座に角度検出することや、精度よく角度検出するという目的を到底達成することはできない。
また、水準器の場合、本発明のような任意の回転軸方向に対応することはできず、例えば回転軸が鉛直方向の場合においては、重力が作用しないため、動作すらしない。よって、本質的な観点で本発明とは解決すべき課題の点で相容れるものではない。
したがって、同じ回転系の回転角度を正確に検出するためには、まずは、回転系全体の変位や振動をキャンセルしながら正確に測定するために、同一回転系に軸支された状態で測定する必要がある。
しかし、同じ回転系で測定する場合は、軸と軸受け間の摩擦力、慣性力などの力が加わる。そのため、回転における支持基準となる側に対し、回転系とは接触しない位置から非接触で回転変位を測定するとよい。そうすれば、回転運動の影響を受けることなく、非接触で精度良く回転変位を測定することが可能となる。
なお、回転系に組み込む軸支した状態で測定する相対的な回転角度測定手段と、回転系とは接触しない位置からの非接触での回転角度測定手段とは、互いに独立した基準を基に、独立して測定することが可能なものであって、互いの測定結果が互いに干渉するものではない。
また、相互の測定結果をつなぎあわせる上で、例えば逆回転しなくてはならなかったり、機構的に嵌めこまなくてはならなかったりなど、別の機構的な外乱要素が入り込む余地も存在しない。
その結果、トータルとして回転運動による回転角度を簡便かつ精度良く検出し、測定することが可能となる。
以上より、本発明の構成、すなわち、支持基準体と、支持基準体に連結され、支持基準体に対し全周回転自在に軸支された駆動する回転体とを有し、支持基準体に対する回転体の相対的な回転角度を検出する相対角度検出手段と、回転体及び支持基準体に接触しない位置を基準として、支持基準体の回転角度を検出する非接触式角度検出手段と、相対角度検出手段による回転角度の検出と非接触式角度検出手段による回転角度の検出とを同期させる同期制御手段を備えることは、当業者が容易に想到し得るものではない。