JP2017117005A - 事故通知システム、通知システム、車載通知装置及び事故通知方法 - Google Patents
事故通知システム、通知システム、車載通知装置及び事故通知方法 Download PDFInfo
- Publication number
- JP2017117005A JP2017117005A JP2015248788A JP2015248788A JP2017117005A JP 2017117005 A JP2017117005 A JP 2017117005A JP 2015248788 A JP2015248788 A JP 2015248788A JP 2015248788 A JP2015248788 A JP 2015248788A JP 2017117005 A JP2017117005 A JP 2017117005A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- notification
- position information
- accident
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000000034 method Methods 0.000 title claims abstract description 52
- 238000004891 communication Methods 0.000 claims description 102
- 238000003384 imaging method Methods 0.000 claims description 27
- 238000001514 detection method Methods 0.000 claims description 24
- 230000002093 peripheral effect Effects 0.000 claims description 15
- 238000012545 processing Methods 0.000 description 114
- 238000010586 diagram Methods 0.000 description 8
- 230000005540 biological transmission Effects 0.000 description 7
- 230000001133 acceleration Effects 0.000 description 5
- 230000004044 response Effects 0.000 description 4
- 206010039203 Road traffic accident Diseases 0.000 description 3
- 230000006399 behavior Effects 0.000 description 3
- 230000006870 function Effects 0.000 description 3
- 238000013459 approach Methods 0.000 description 2
- 239000000284 extract Substances 0.000 description 2
- 230000005856 abnormality Effects 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 238000012805 post-processing Methods 0.000 description 1
- 238000005070 sampling Methods 0.000 description 1
Images








Landscapes
- Traffic Control Systems (AREA)
Abstract
【課題】事故又は災害等に係る情報を長期間に亘って通知することができる事故通知システム、通知システム、車載通知装置及び事故通知方法を提供する。
【解決手段】事故発生を検出した車両1bは、車両1c,1d及びサーバ装置4へ事故発生位置情報を含む事故発生通知を送信する。事故発生通知を受信した車両1c,1dは、事故発生位置情報と自車両の位置情報とが所定条件を満たす場合、車載カメラの撮像画像を事故状況通知としてサーバ装置4へ送信する。サーバ装置4は、車両1b又は車両1c,1dからの通知を受信した場合、事故発生位から所定範囲内に存在する車両1e,1fへ事故発生通知を行う。サーバ装置4からの事故発生通知を受信した車両1e,1fは、通知された事故発生位置情報と自車両の位置情報とが所定条件を満たす場合、車載カメラの撮像画像を事故状況通知としてサーバ装置4へ送信する。
【選択図】図1
【解決手段】事故発生を検出した車両1bは、車両1c,1d及びサーバ装置4へ事故発生位置情報を含む事故発生通知を送信する。事故発生通知を受信した車両1c,1dは、事故発生位置情報と自車両の位置情報とが所定条件を満たす場合、車載カメラの撮像画像を事故状況通知としてサーバ装置4へ送信する。サーバ装置4は、車両1b又は車両1c,1dからの通知を受信した場合、事故発生位から所定範囲内に存在する車両1e,1fへ事故発生通知を行う。サーバ装置4からの事故発生通知を受信した車両1e,1fは、通知された事故発生位置情報と自車両の位置情報とが所定条件を満たす場合、車載カメラの撮像画像を事故状況通知としてサーバ装置4へ送信する。
【選択図】図1
Description
本発明は、車両の事故に係る情報などを通知する事故通知システム、通知システム、車載通知装置及び事故通知方法に関する。
特許文献1においては、交通事故が発生した場合に、その交通事故発生状況をより正確に把握することを目的としたドライブレコーダシステムが提案されている。このドライブレコーダシステムは、事故車両及び周辺車両の走行履歴データを収集し、収集した走行履歴データに基づいて交通事故の発生状況を映像で再現する。
特許文献2においては、無線通信により得られる情報を、事故等の緊急事態発生後の事後処理に利用することを目的とした車載通信機が提案されている。この車載通信機は、他の車載通信機の移動状態を示す挙動情報を取得し、取得した挙動情報を車外の中央装置に蓄積させる。
特許文献3においては、車両の事故原因を解析する際に有効な情報を極力保存することを目的とした事故通報システムが提案されている。この事故通報システムは、各車両に搭載される車載装置と、車両の事故原因を解析するための事故解析サーバとからなる。車載装置は、各種のセンサの検知結果に基づいて車両の挙動異常を検出した場合、車両の外部に対して緊急撮像リクエスト信号を送信する。車載装置は、車載カメラにより撮像された画像データをメモリに記憶すると共に、車両外部から緊急撮像リクエストを受信した場合、その受信前後の一定時間分だけ記憶された画像データを事故解析サーバへ送信する。
近年では、事故又は災害等が発生した場合に、この事故又は災害等の正確な状況を把握することが非常に重要になってきている。特許文献1〜3に記載の技術は、事故発生時及びその前後一定時間の短時間に得られた画像データなどを収集する技術である。しかしながら、事故又は災害等の状況は時々刻々と変化するため、事故又は災害等の発生時及びその前後の短時間のみではなく、発生からある程度の長い期間に亘って時々刻々と変化する事故又は災害等の状況を把握することが求められている。特許文献1〜3に記載の技術は、このような要求に応え得るものではない。
本発明は、斯かる事情に鑑みてなされたものであって、その目的とするところは、事故又は災害等に係る情報を長期間に亘って通知することができる事故通知システム、通知システム、車載通知装置及び事故通知方法を提供することにある。
本発明に係る事故通知システムは、第1の車両に搭載され、前記第1の車両の位置情報を取得する位置情報取得部、前記第1の車両に係る事故の発生を検出する事故検出部が事故の発生を検出した場合に車車間通信により他車両へ前記位置情報取得部が取得した位置情報を通知する車車間通知部、及び、前記事故検出部が事故の発生を検出した場合に車両外の装置へ前記位置情報取得部が取得した位置情報を通知する車外通知部を有する第1車載通知装置と、第2の車両に搭載され、前記第2の車両の位置情報を取得する位置情報取得部、車車間通信により前記第1車載通知装置からの通知を受信した場合に、該通知に係る位置情報及び前記位置情報取得部が取得する位置情報が所定条件を満たすか否かを判定する位置判定部、該位置判定部が所定条件を満たすと判定した場合に、前記第2の車両の周辺を撮像した画像を取得する周辺画像取得部、並びに、前記位置情報取得部が取得した位置情報及び前記周辺画像取得部が取得した画像を前記車両外の装置へ通知する車外通知部を有する第2車載通知装置と、車両外に設けられ、前記第1車載通知装置又は前記第2車載通知装置からの通知を受信した場合に、該通知に係る位置情報に基づく所定範囲内の車両へ、前記位置情報を通知する通知部を有する事故通知装置と、第3の車両に搭載され、前記第3の車両の位置情報を取得する位置情報取得部、前記事故通知装置からの通知を受信した場合に、該通知に係る位置情報及び前記位置情報取得部が取得する位置情報が所定条件を満たすか否かを判定する位置判定部、該位置判定部が所定条件を満たすと判定した場合に、前記第3の車両の周辺を撮像した画像を取得する周辺画像取得部、並びに、前記位置情報取得部が取得した位置情報及び前記周辺画像取得部が取得した画像を前記事故通知装置へ通知する車外通知部を有する第3車載通知装置とを備えることを特徴とする。
また、本発明に係る事故通知システムは、前記第3車載通知装置が、前記位置情報取得部による位置情報の取得及び前記位置判定部による判定を継続的に行い、前記位置判定部が所定条件を満たすと判定した場合に、周辺画像取得部が前記第3の車両の周辺を撮像した画像を取得することを特徴とする。
また、本発明に係る事故通知システムは、前記事故通知装置が、前記第2車載通知装置及び前記第3車載通知装置から通知された画像を記憶する記憶部と、更なる画像の取得が必要であるか否かを判定する判定部と、前記判定部が画像の取得が必要でないと判定した場合に、前記第3車載通知装置へ画像取得の停止を要求する停止要求部とを有することを特徴とする。
また、本発明に係る通知システムは、第1の車両に搭載され、前記第1の車両の位置情報を取得する位置情報取得部、車車間通信により他車両へ前記位置情報取得部が取得した位置情報を通知する車車間通知部、及び、車両外の装置へ前記位置情報取得部が取得した位置情報を通知する車外通知部を有する第1車載通知装置と、第2の車両に搭載され、前記第2の車両の位置情報を取得する位置情報取得部、車車間通信により前記第1車載通知装置からの通知を受信した場合に、該通知に係る位置情報及び前記位置情報取得部が取得する位置情報が所定条件を満たすか否かを判定する位置判定部、該位置判定部が所定条件を満たすと判定した場合に、前記第2の車両の周辺に係る情報を取得する周辺情報取得部、並びに、前記位置情報取得部が取得した位置情報及び前記周辺情報取得部が取得した情報を前記車両外の装置へ通知する車外通知部を有する第2車載通知装置と、車両外に設けられ、前記第1車載通知装置又は前記第2車載通知装置からの通知を受信した場合に、該通知に係る位置情報に基づく所定範囲内の車両へ、前記位置情報を通知する通知部を有する通知装置と、第3の車両に搭載され、前記第3の車両の位置情報を取得する位置情報取得部、前記通知装置からの通知を受信した場合に、該通知に係る位置情報及び前記位置情報取得部が取得する位置情報が所定条件を満たすか否かを判定する位置判定部、該位置判定部が所定条件を満たすと判定した場合に、前記第3の車両の周辺に係る情報を取得する周辺情報取得部、並びに、前記位置情報取得部が取得した位置情報及び前記周辺情報取得部が取得した情報を前記通知装置へ通知する車外通知部を有する第3車載通知装置とを備えることを特徴とする。
また、本発明に係る車載通知装置は、車両に搭載され、前記車両の位置情報を取得する位置情報取得部と、前記車両外に設けられた事故通知装置から事故発生に係る位置情報の通知を受信した場合に、該通知に係る位置情報及び前記位置情報取得部が取得する位置情報が所定条件を満たすか否かを判定する位置判定部と、該位置判定部が所定条件を満たすと判定した場合に、前記車両の周辺を撮像した画像を取得する周辺画像取得部と、前記位置情報取得部が取得した位置情報及び前記周辺画像取得部が取得した画像を前記事故通知装置へ通知する車外通知部とを備えることを特徴とする。
また、本発明に係る事故通知方法は、第1の車両に搭載された第1車載通知装置が、前記第1の車両に係る事故の発生を検出した場合に、車車間通信により他車両へ前記第1の車両の位置情報を通知し、前記第1車載通知装置が、前記第1の車両に係る事故の発生を検出した場合に、車両外の装置へ前記第1の車両の位置情報を通知し、第2の車両に搭載された第2車載通知装置が、車車間通信により前記第1車載通知装置からの通知を受信した場合に、該通知に係る位置情報及び前記第2の車両の位置情報が所定条件を満たすか否かを判定し、前記第2車載通知装置が、前記所定条件を満たすと判定した場合に、前記第2の車両の位置情報及び前記第2の車両の周辺を撮像した画像を前記車両外の装置へ通知し、車両外に設けられた事故通知装置が、前記第1車載通知装置又は前記第2車載通知装置からの通知を受信した場合に、該通知に係る位置情報に基づく所定範囲内の車両へ、前記位置情報を通知し、第3の車両に搭載された第3車載通知装置が、前記事故通知装置からの通知を受信した場合に、該通知に係る位置情報及び前記第3の車両の位置情報が所定条件を満たすか否かを判定し、前記第3車載通知装置が、前記所定条件を満たすと判定した場合に、前記第3の車両の位置情報及び前記第3の車両の周辺を撮像した画像を前記事故通知装置へ通知することを特徴とする。
本発明においては、第1の車両に搭載された第1車載通知装置は、事故発生を検出した場合に、車車間通信により位置情報を第2の車両へ通知すると共に、車両外に設けられた事故通知装置へ通知する。ここで第1の車両は、事故に遭遇した車両又は事故発生個所近傍に存在する車両等であり、各種の車載センサの検知結果又は車載カメラの撮影画像等に基づいて事故発生の検出を行うことができる。第1車載通知装置が事故発生の通知を、第2の車両及び車外の事故通知装置の2ヶ所に対して行う構成とすることにより、いずれか一方へのみ通知を行う構成と比較して、より確実に事故発生を通知することができる。
第2の車両に搭載された第2車載通知装置は、第1車載通知装置からの通知を車車間通信により受信した場合に、通知された位置情報と自身の位置情報とが所定条件(例えば自車両の位置情報が通知された事故の位置情報から所定距離以内であるなど)を満たすか否かを判定する。所定条件を満たす場合、第2車載通知装置は、周辺を撮像して得られた画像を位置情報と共に事故通知装置へ通知する。ここで第2の車両は、第1の車両と車車間通信を行うことができる範囲内に存在する車両である。第2の車両が事故発生個所の近傍に存在する場合又は近傍を走行する場合等に、第2車載通知装置が事故発生個所周辺の撮像画像を事故通知装置へ通知することができる。
車両外に設けられた事故通知装置は、第1の車両又は第2の車両からの通知を受信した場合、通知された位置情報に基づく所定範囲(例えば事故発生個所から数百メートル以内又は数キロメートル以内等の範囲)に存在する第3の車両へ、第1の車両又は第2の車両から通知された位置情報を通知する。なお事故通知装置が通知する所定範囲は、第1の車両及び第2の車両による車車間通信の範囲より広い範囲であり、第3の車両には第2の車両を含み得る。
第3の車両に搭載された第3車載通知装置は、事故通知装置からの通知を受信した場合に、通知された位置情報と自身の位置情報とが所定条件を満たすか否かを判定する。なお第3の車両が判定する所定条件は、第2の車両が判定する所定条件と同じ条件であってもよく、異なる条件であってもよい。所定条件を満たす場合、第3車載通知装置は、周辺を撮像して得られた画像を位置情報と共に事故通知装置へ通知する。これにより、第1の車両と車車間通信を行うことができない範囲に存在する第3の車両が事故発生個所の近傍を走行する場合などに、第3車載通知装置が事故発生個所周辺の撮像画像を事故通知装置へ通知することができる。
第2の車両に搭載された第2車載通知装置は、第1車載通知装置からの通知を車車間通信により受信した場合に、通知された位置情報と自身の位置情報とが所定条件(例えば自車両の位置情報が通知された事故の位置情報から所定距離以内であるなど)を満たすか否かを判定する。所定条件を満たす場合、第2車載通知装置は、周辺を撮像して得られた画像を位置情報と共に事故通知装置へ通知する。ここで第2の車両は、第1の車両と車車間通信を行うことができる範囲内に存在する車両である。第2の車両が事故発生個所の近傍に存在する場合又は近傍を走行する場合等に、第2車載通知装置が事故発生個所周辺の撮像画像を事故通知装置へ通知することができる。
車両外に設けられた事故通知装置は、第1の車両又は第2の車両からの通知を受信した場合、通知された位置情報に基づく所定範囲(例えば事故発生個所から数百メートル以内又は数キロメートル以内等の範囲)に存在する第3の車両へ、第1の車両又は第2の車両から通知された位置情報を通知する。なお事故通知装置が通知する所定範囲は、第1の車両及び第2の車両による車車間通信の範囲より広い範囲であり、第3の車両には第2の車両を含み得る。
第3の車両に搭載された第3車載通知装置は、事故通知装置からの通知を受信した場合に、通知された位置情報と自身の位置情報とが所定条件を満たすか否かを判定する。なお第3の車両が判定する所定条件は、第2の車両が判定する所定条件と同じ条件であってもよく、異なる条件であってもよい。所定条件を満たす場合、第3車載通知装置は、周辺を撮像して得られた画像を位置情報と共に事故通知装置へ通知する。これにより、第1の車両と車車間通信を行うことができない範囲に存在する第3の車両が事故発生個所の近傍を走行する場合などに、第3車載通知装置が事故発生個所周辺の撮像画像を事故通知装置へ通知することができる。
また本発明においては、第3の車両に搭載された第3車載通知装置は、事故通知装置からの通知を受信した後、位置情報が所定条件を満たすか否かの判定を継続的に行い、所定条件を満たすと判定した場合に撮像画像を取得して事故通知装置への通知を行う。これにより、事故通知装置からの通知を受信した際には事故発生個所の周辺に第3の車両が存在していない場合であっても、その後の走行によって第3の車両が事故発生個所へ近付いた場合などに、第3車載通知装置が画像の取得及び通知を行うことができる。
また本発明において事故通知装置は、第2車載通知装置及び第3車載通知装置から通知された画像を記憶する。事故通知装置は、例えば記憶した画像に基づいて、更なる画像の取得が必要であるか否かを判定する。事故通知装置は、例えば事故車両が事故現場から撤去された場合などに、事故処理が終了し、更なる画像の取得が不要であると判定することができる。画像の取得が不要であると判定した場合、事故通知装置は、第3車載通知装置に対して画像取得の停止を要求する。これにより、事故通知装置からの通知に応じて位置判定などの処理を継続的に行っている第3車載通知装置について処理を停止させることができ、不要な画像が事故通知装置へ通知され続けることを防止できる。
本発明に係る事故通知システムは、事故発生を検知した第1車載通知装置、又は、第1車載通知装置から通知を受けた第2車載通知装置からの通知を車両外の事故通知装置が受信し、通知された位置情報に基づく所定範囲内の第3の車両に搭載された第3車載通知装置へ事故通知装置が通知を行い、この通知に応じて第3車載通知装置が自身の位置情報が所定条件を満たす場合に周辺の撮像画像を事故通知装置へ通知する構成である。これにより、より広い範囲に存在する第3の車両へ事故に係る情報の取得を行わせることができ、事故又は災害等に係る情報を長期間に亘って通知することが可能となる。
図1〜図3は、本実施の形態に係る事故通知システムの概要を説明するための模式図である。本実施の形態に係る事故通知システムは、複数の車両1に搭載された車載通知装置10(図4参照)と、例えば管理センターなどに設置されたサーバ装置4とが、携帯電話通信網の基地局6を介した通信を行うことにより、車両1とサーバ装置4との間で事故に関する情報の通知を行う構成である。また本実施の形態に係る事故通知システムでは、各車両1には他車両との無線通信を行う機能、いわゆる車車間通信機能が搭載されており、複数の車両1間で事故に関する情報の通知を行うことができる。
なお、本実施の形態に係る事故通知システムには複数の車両1が含まれるが、これらを区別する必要がある場合には車両1a,1b…のように符号の最後にa,b…のアルファベットを付して区別する。複数の基地局6についても同様に、これらを区別する必要がある場合には6a,6bとして区別する。また、図1〜図3に示す例は、道路上にて2つの車両1a及び1bが衝突事故を起こした場合に、複数の車両1及びサーバ装置4との間で行われる通知の様子を模式的に図示したものであり、道路状況及び車両位置等の変化を図1,図2,図3の順で時系列的に示してある。
例えば道路上で車両1bがセンターラインを越えて対向の車両1aと衝突する事故が発生したものとする。この場合に車両1b(に搭載された車載通知装置10)は、各種のセンサなどにより事故の発生を検出する(図1の(A)参照)。事故を検出した車両1bは、携帯電話通信網を利用した無線通信により最寄りの基地局6aを介してサーバ装置4との通信を行い、事故の発生を通知する(図1の(B)参照)。このときに車両1bは、GPS(Global Positioning System)に基づく自身の位置情報をサーバ装置4へ通知する。以下、事故を検出した車両1が行う通知を事故発生通知といい、このときに通知される位置情報を事故発生位置情報という。また車両1bは、車車間通信機能を利用した無線通信により周辺の車両1c及び1dへ事故発生通知を行う(図1の(C)参照)。このときにも車両1bは、自身の位置情報を事故発生位置情報として他の車両1c及び1dへ通知する。なお、車両1aについても同様に事故検出及び事故発生通知等の処理が行われ得るが、本例では説明を省略する。
車両1bから車車間通信による事故発生通知を受信した車両1c及び1dは、通知された事故発生位置情報と、GPSに基づいて取得した自車両の位置情報とを比較する。車両1c及び1dは、自車両の位置が事故発生位置から所定範囲内(例えば数メートル〜数十メートル以内)である場合、車載カメラにより周辺の撮像を行う。なお事故発生位置から所定範囲内でない場合、車両1c及び1dは、この時点での車載カメラによる撮像は行わず、位置情報の比較を継続的に行って、その後の走行により事故発生位置から所定範囲内へ移動した際に車載カメラによる撮像を行う。車載カメラによる撮像を行った場合、車両1c及び車両1dは、撮像により得られた画像と、撮影を行った際の自車両の位置情報とを、携帯電話通信網を利用した無線通信により最寄りの基地局6aを介してサーバ装置4へ通知する(図1の(D)参照)。以下、事故発生通知に応じて車両1が行う通知を事故状況通知という。なお車両1c及び1dによる撮像及び事故状況通知は、車両1c及び1dが事故発生位置から所定範囲内に存在する間、繰り返して行ってよい。
車両1bから事故発生通知を受信したサーバ装置4は、通知された事故発生位置情報を記憶する。またサーバ装置4は、各車両1の走行位置を定期的に取得して管理しており、事故発生位置から所定範囲内(例えば数百メートル〜数キロメートル以内)を走行している車両1を検索する。サーバ装置4は、該当する車両1e及び1fに対して、携帯電話通信網を利用した無線通信により基地局6bを介して事故の発生を通知する(図1の(E)参照)。このときにサーバ装置4は、車両1bから通知された事故発生位置情報を車両1e及び1fへ通知する。以下、サーバ装置4が行う通知も事故発生通知という。なおサーバ装置4による事故発生通知は、車両1a〜1dに対しても行われ得るが、本例では説明を省略する。なお、事故に伴う装置の故障などにより車両1bが事故発生通知をサーバ装置4へ送信できない場合があり得るが、サーバ装置4は、他の車両1c又は1dからの事故状況通知を受信した場合には、車両1bから事故発生通知を受信していない場合であっても、車両1e及び1fへの事故発生通知を送信する構成としてよい。この場合にサーバ装置4は、例えば最初に受信した事故状況通知にて通知された位置情報を、事故発生位置情報として扱うことができる。
サーバ装置4から事故発生通知を受信した車両1e及び1fは、自車両の位置が事故発生位置から所定範囲内(例えば数メートル〜数十メートル以内)である場合、車載カメラにより周辺の撮像を行う。サーバ装置4から事故発生通知を受信した場合に車載カメラによる撮像を行う条件は、車両1bから事故発生通知を受信した場合と同じ条件であってもよく、異なる条件であってもよい。事故発生位置から所定範囲内でない場合、車両1e及び1fは、この時点での車載カメラによる撮像は行わず、位置情報の比較を継続的に行って、その後の走行により事故発生位置から所定範囲内へ移動した際に車載カメラによる撮像を行う。車載カメラによる撮像を行った場合、車両1e及び車両1fは、撮像により得られた画像と、撮影を行った際の自車両の位置情報とを、携帯電話通信網を利用した無線通信により最寄りの基地局6aを介してサーバ装置4へ通知する(図2の(F)参照)。なお車両1e及び1fによる撮像及び事故状況通知は、車両1e及び1fが事故発生位置から所定範囲内に存在する間、繰り返して行ってよい。
車両1c〜1fから事故状況通知を受信したサーバ装置4は、事故状況通知に含まれる車載カメラの撮像画像と撮像時の位置情報とを対応付けて記憶する。サーバ装置4は、これらの情報に対して更に通知を受信した日時情報、又は、通知を送信した車両1の識別情報等を対応付けて記憶してもよい。サーバ装置4は、車両1a及び1bの事故に係る画像の更なる取得が必要であるか否かを判定する。このときにサーバ装置4は、例えば事故状況通知として受信した画像に基づいて、事故処理が終了したか否かを判定してもよく、また例えば事故処理を行った救急隊員からの通報などに基づいて判定してもよく、これら以外の方法で画像の取得が必要であるか否かを判定してもよい。
画像の取得が必要であると判定した場合、サーバ装置4は、車両1に対する事故発生通知を継続的に行う。図示の例では、サーバ装置4は更に車両1gに対して事故発生通知を行っている(図2の(G)参照)。サーバ装置4からの事故発生通知に応じて、車両1gは、事故発生位置から所定範囲内を走行した際に車載カメラによる撮像を行って、サーバ装置4に対する事故状況通知を行う(図3の(H)参照)。本例では、車両1gが行った事故状況通知を受信したサーバ装置4が、通知された画像に基づいて事故処理が終了したと判定し、更なる画像の取得が必要ではないと判定したものとする。
画像の取得が必要でないと判定した場合、サーバ装置4は、車両1に対して事故状況通知の停止要求を送信する(図3の(I)参照)。このときにサーバ装置4は、例えば事故発生位置から所定範囲内(事故発生通知を送信する範囲と同じか又はそれよりも広い範囲)に存在する車両1に対して停止要求を送信してもよく、また例えばこれまでに事故発生通知を送信した車両1に対して停止要求を送信してもよく、これら以外の判断基準で選択した車両1に対して停止要求を送信してもよい。本例では、事故発生通知の送信範囲と同じ範囲内に存在する車両1hに対してサーバ装置4が停止要求を送信している。サーバ装置4からの停止要求を受信した車両1は、事故発生位置と自身の走行位置との比較、車載カメラによる周辺の撮像、及び、撮像した画像の通知等の処理を停止する。
このように本実施の形態に係る事故通知システムでは、車両1a及び1bの事故発生から事故処理終了までの長期間に亘る画像の収集がサーバ装置4により行われる。これにより、例えば事故現場において2次災害が発生した場合などに、サーバ装置4が蓄積した画像に基づいて2次災害の原因を解析するなどの処理を行うことができる。
図4は、本実施の形態に係る車両1に搭載される車載通知装置10の構成を示すブロック図である。本実施の形態に係る車両1には、車載通知装置10、車車間通信装置11、無線通信装置12、車載センサ13、車載カメラ14及びGPS受信機15等が搭載されている。また本実施の形態に係る車載通知装置10は、処理部20、車車間通信部21、無線通信部22、センサ入力部23、カメラI/F(インタフェース)24及びGPS入力部25等を備えて構成されている。処理部20は、CPU(Central Processing Unit)又はMPU(Micro-Processing Unit)等の演算処理装置を用いて構成されている。処理部20は、図示しないROM(Read Only Memory)などに記憶されたプログラムを読み出して実行することにより、車両1に係る事故検出処理及び事故通知処理等を行う。
車車間通信装置11は、所定周波数の無線信号を送受信することによって、他の車両1に搭載された車車間通信装置11との間で無線通信を行うことができる。車車間通信装置11は、車両1内に配された通信線を介して車載通知装置10の車車間通信部21に接続されている。車車間通信部21は、処理部20から与えられた送信用のメッセージを車車間通信装置11へ与えることにより、他の車両1へのメッセージ送信を行う。また車車間通信装置11が他の車両1から受信したメッセージは車車間通信部21へ与えられ、車車間通信部21は車車間通信装置11から与えられたメッセージを処理部20へ与えることによりメッセージ受信を行う。
無線通信装置12は、携帯電話通信網を利用した無線通信を行うことができ、携帯電話通信網を構成する基地局6との間で無線信号の送受信を行うことによって、基地局6を介してサーバ装置4との通信を行うことができる。無線通信装置12は、車両1内に配された通信線を介して車載通知装置10の無線通信部22に接続されている。無線通信部22は、処理部20から与えられた送信用のメッセージを無線通信装置12へ与えることにより、サーバ装置4へのメッセージ送信を行う。また無線通信装置12がサーバ装置4から受信したメッセージは無線通信部22へ与えられ、無線通信部22は無線通信装置12から与えられたメッセージを処理部20へ与えることによりメッセージ受信を行う。
車載センサ13は、車両1に搭載された一又は複数のセンサである。車速センサ13には、例えば加速度センサ、速度センサ又は衝撃センサ等の種々のセンサが含まれ得る。車速センサ13は、車両1内に配された信号線を介して車載通知装置10のセンサ入力部23に接続されている。車速センサ13の検知結果は電気信号としてセンサ入力部23へ入力され、センサ入力部23は、入力された電気信号をサンプリングしてデジタル化したデータを車速センサ13の検知結果として処理部20へ与える。
車載カメラ14は、例えば車両1の前方を撮像する一又は複数のカメラである。車載カメラ14には、車両1の後方又は側方等の前方以外の方向を撮像するカメラを含んでもよい。車載カメラ14は、車両1内に配された通信線を介して車載通知装置10のカメラI/F24に接続されている。カメラI/F24は、処理部20から与えられた動作命令などを車載カメラ14へ送信し、これにより車載カメラ14による撮像等の動作が制御される。車載カメラ14は、車載通知装置10からの動作命令に応じて車両1の周辺の撮像を行い、撮像した画像データを車載通知装置10のカメラI/F24へ入力する。カメラI/F24は、車載カメラ14からの画像データを処理部20へ与える。
GPS受信機15は、GPSの複数の人工衛星が送信する無線信号を受信し、受信した複数の無線信号に基づいて位置情報(例えば緯度及び経度)を算出する。GPS受信機15は、車両1内に配された通信線を介して車載通知装置10のGPS入力部25に接続されている。GPS受信機15が算出した位置情報はデジタル信号としてGPS入力部25へ入力され、GPS入力部25は、入力された位置情報を処理部20へ与える。
本実施の形態に係る車載通知装置10の処理部20には、ROMなどに記憶されたプログラムを実行することにより、位置情報取得部31、事故検出部32、位置判定部33、画像取得部34及び通知処理部35等がソフトウェア的な機能ブロックとして実現される。位置情報取得部31は、事故の発生を検出した場合、及び、事故発生通知を受信して通知された事故発生位置と自車両の位置との比較を行う場合等に、GPS受信機15から与えられるGPSに基づく位置情報を、GPS入力部25を介して取得する処理を行う。
事故検出部32は、車載センサ13による検知結果をセンサ入力部23にて定期的に取得し、取得した検知結果に基づいて車両1に係る事故の検出を行う。事故検出部32は、例えば加速度センサが検知する加速度が閾値を超えた場合などに事故が発生したと判断する構成とすることができる。また事故検出部32は、車載カメラ14が撮像する画像に基づいて事故の検出を行ってもよく、車載センサ13及び車載カメラ14を併用して事故の検出を行ってもよく、更には車載センサ13及び車載カメラ14以外の装置を用いて事故の検出を行ってもよい。
位置判定部33は、事故発生通知を受信した場合に、通知された事故発生位置情報と、位置情報取得部31にて取得した自車両の位置情報とを比較し、事故発生位置情報と自車両の位置情報とが所定条件を満たすか否かを判定する。本実施の形態において位置判定部33は、自車両の位置が事故発生位置から所定範囲内であることを所定条件として判定を行うが、これ以外の条件を採用してもよい。
画像取得部34は、位置判定部33が所定条件を満たすと判定した場合など、車載カメラ14による撮像が必要である場合に、カメラI/F24から動作命令を送信して車載カメラ14に撮像を行わせる。画像取得部34は、車載カメラ14が撮像した画像のデータをカメラI/F24を介して取得する。
通知処理部35は、事故検出部32が事故を検出した場合に、無線通信装置12を用いたサーバ装置4への事故発生通知を行うと共に、車車間通信装置11を用いた他の車両1への事故発生通知を行う。このときに通知処理部35は、位置情報取得部31が取得した自車両の位置情報を自己発生位置情報として通知する。また通知処理部35は、サーバ装置4からの事故発生通知を受信した後、事故発生位置情報と位置情報取得部31が取得する位置情報とが所定条件を満たすと位置判定部33が判定した場合に、無線通信装置12を用いたサーバ装置4への事故状況通知を行う。このときに通知処理部35は、画像取得部34が取得した車両1周辺の画像と、位置情報取得部31が取得した自車両の位置情報とを通知する。
図5は、本実施の形態に係るサーバ装置4の構成を示すブロック図である。サーバ装置4は、処理部40、記憶部41及び通信部42等を備えて構成されている。処理部40は、CPU又はMPU等の演算処理装置を用いて構成されている。処理部40は、記憶部41に記憶されたプログラム(図示は省略する)を読み出して実行することにより、車両1から事故発生通知又は事故状況通知を受信する処理、及び、車両1へ事故発生通知を送信する処理等を行うことができる。
記憶部41は、ハードディスクなどの記憶装置を用いて構成されている。本実施の形態において、記憶部41には、車両位置DB(データベース)55及び事故画像DB56が設けられている。車両位置DB55にはサーバ装置4が通信を行うことが可能な各車両1の位置情報が記憶されており、サーバ装置4は、各車両1から定期的に位置情報を取得して車両位置DB55の更新を行っている。事故画像DB56には、車両1から事故状況通知として受信した画像が、撮像された位置情報などの情報と対応付けて記憶されている。
通信部42は、例えばインターネット又は専用ネットワーク等を介して基地局6との間で通信を行うことができる。基地局6は、携帯電話通信網を構成するための装置であり、複数の基地局6が車両1の走行し得る道路の近傍に適所に設置されている。車両1の無線通信装置12は、最寄りの基地局6との間で無線通信を行うことで、基地局6を介してサーバ装置4との通信を行うことができる。通信部42は、処理部40から与えられた送信用のメッセージを基地局6へ送信すると共に、基地局6から受信したメッセージを処理部40へ与える。
本実施の形態に係るサーバ装置4の処理部40には、記憶部41に記憶されたプログラムを実行することにより、通知処理部51、判定処理部52及び停止要求処理部53等がソフトウェア的な機能ブロックとして実現される。通知処理部51は、車両1からの事故発生通知及び事故状況通知を受信する処理、並びに、車両1への事故発生通知を送信する処理等を行う。通知処理部51は、車両1から事故発生通知を受信した場合、通知された事故発生位置情報を記憶部41に記憶すると共に、事故発生位置から所定範囲内に存在する車両1を記憶部41の車両位置DB55から抽出して、抽出した車両1に対して事故発生通知を送信する。通知処理部51は、車両1から事故状況通知を受信した場合、通知された車載カメラ14の画像を位置情報と共に記憶部41の事故画像DB56に記憶する。
判定処理部52は、車両1の事故に関してこれ以上の画像取得が必要であるか否かの判定を行う。例えば判定処理部52は、車両1から事故状況通知として受信した複数の画像から事故現場が撮像されたものを抽出し、事故現場の画像に写された事故車両の時系列的な変化を判定し、事故車両が道路上から撤去されたと判定される場合に、これ以上の画像取得が必要ないと判定する。ただしこの判定方法は一例であって、これに限るものではなく、サーバ装置4は何らかの方法で車両1による画像取得を終了するタイミングを判定すればよい。
停止要求処理部53は、判定処理部52がこれ以上の画像取得が必要でないと判定した場合に、車両1に対して事故状況通知の停止要求を送信する処理を行う。停止要求処理部53は、記憶部41に記憶した事故発生位置情報に基づいて、事故発生位置から所定範囲内に存在する車両1を車両位置DB55から抽出して、抽出した車両1に対して停止要求を送信する。なおサーバ装置4は、これまでに事故発生通知を送信した車両1を記憶しておき、記憶した車両1に対して停止要求を送信する構成としてもよい。
図6は、車載通知装置10が行う事故発生通知処理の手順を示すフローチャートである。車載通知装置10の処理部20の事故検出部32は、車載センサ13の検知結果をセンサ入力部23にて取得する(ステップS1)。事故検出部32は、取得した検知結果に基づいて、例えば加速度センサが検知した加速度が閾値を超えるか否かを判定するなどして、車両1に事故が発生したか否かを判定する(ステップS2)。事故が発生していないと判定した場合(S2:NO)、処理部20の位置情報取得部31は、GPS受信機15による車両1の位置情報をGPS入力部25にて取得する(ステップS3)。処理部20は、ステップS3にて取得した位置情報を無線通信装置12にてサーバ装置4へ送信することにより、定期的な車両1の一報告を行い(ステップS4)、ステップS1へ処理を戻す。
事故が発生したと判定した場合(S2:YES)、処理部20の位置情報取得部31は、GPS受信機15による車両1の位置情報をGPS入力部25にて取得する(ステップS5)。処理部20の通知処理部35は、無線通信装置12にてサーバ装置4へ、ステップS5にて取得した位置情報を含む事故発生通知を送信する(ステップS6)。また通知処理部35は、車車間通信装置11にて他の車両1へ、ステップS5にて取得した位置情報を含む事故発生通知を送信し(ステップS7)、処理を終了する。
図7は、車載通知装置10が車車間通信にて事故発生通知を受信した際に行う処理の手順を示すフローチャートである。車載通知装置10の処理部20は、車車間通信装置11にて他の車両1から事故発生通知を受信したか否かを判定する(ステップS11)。事故発生通知を受信していない場合(S11:NO)、処理部20は、車車間通信にて事故発生通知を受信するまで待機する。事故発生通知を受信した場合(S11:YES)、処理部20は、受信した事故発生通知から事故発生位置情報を取得する(ステップS12)。また処理部20の位置情報取得部31は、GPS受信機15による車両1の位置情報をGPS入力部25にて取得する(ステップS13)。
処理部20の位置判定部33は、ステップS12にて取得した事故発生位置情報と、ステップS13にて取得した自車両の位置情報とを比較し、自車両の位置が事故発生位置から所定範囲内であるか否かを判定する(ステップS14)。自車両の位置が事故発生位置から所定範囲内である場合(S14:YES)、処理部20の画像取得部34は、車載カメラ14による車両1の周辺の撮像を行って撮像画像を取得する(ステップS15)。処理部20の通知処理部35は、ステップS13にて取得した自車両の位置情報と、ステップS15にて取得した画像とを含む事故状況通知を、無線通信装置12にてサーバ装置4へ送信し(ステップS16)、処理を終了する。
自車両の位置が事故発生位置から所定範囲内でない場合(S14:NO)、処理部20は、サーバ装置4からの停止要求を無線通信装置12にて受信したか否かを判定する(ステップS17)。停止要求を受信していない場合(S17:NO)、処理部20は、ステップS12へ処理を戻す。停止要求を受信した場合(S17:YES)、処理部20は、処理を終了する。
図8は、車載通知装置10がサーバ装置4からの事故発生通知を受信した際に行う処理の手順を示すフローチャートである。車載通知装置10の処理部20は、無線通信装置12にてサーバ装置4から事故発生通知を受信したか否かを判定する(ステップS31)。事故発生通知を受信していない場合(S31:NO)、処理部20は、サーバ装置4からの事故発生通知を受信するまで待機する。事故発生通知を受信した場合(S31:YES)、処理部20は、受信した事故発生通知から事故発生位置情報を取得する(ステップS32)。また処理部20の位置情報取得部31は、GPS受信機15による車両1の位置情報をGPS入力部25にて取得する(ステップS33)。
処理部20の位置判定部33は、ステップS32にて取得した事故発生位置情報と、ステップS33にて取得した自車両の位置情報とを比較し、自車両の位置が事故発生位置から所定範囲内であるか否かを判定する(ステップS34)。自車両の位置が事故発生位置から所定範囲内である場合(S34:YES)、処理部20の画像取得部34は、車載カメラ14による車両1の周辺の撮像を行って撮像画像を取得する(ステップS35)。処理部20の通知処理部35は、ステップS33にて取得した自車両の位置情報と、ステップS35にて取得した画像とを含む事故状況通知を、無線通信装置12にてサーバ装置4へ送信し(ステップS36)、処理を終了する。
自車両の位置が事故発生位置から所定範囲内でない場合(S34:NO)、処理部20は、サーバ装置4からの停止要求を無線通信装置12にて受信したか否かを判定する(ステップS37)。停止要求を受信していない場合(S37:NO)、処理部20は、ステップS32へ処理を戻す。停止要求を受信した場合(S37:YES)、処理部20は、処理を終了する。
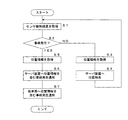
図9は、サーバ装置4が事故発生通知を受信した場合に行う処理の手順を示すフローチャートである。サーバ装置4の処理部40の通知処理部51は、車両1からの事故発生通知を通信部42にて受信したか否かを判定する(ステップS51)。事故発生通知を受信していない場合(S51:NO)、通知処理部51は、事故発生通知を受信するまで待機する。事故発生通知を受信した場合(S51:YES)、通知処理部51は、受信した事故発生通知から事故発生位置情報を取得する(ステップS52)。取得した事故発生位置情報に基づいて、通知処理部51は、記憶部41の車両位置DB55を参照し、事故発生位置から所定範囲内に存在する車両1を通知対象の車両として選択する(ステップS53)。通知処理部51は、ステップS53にて選択した車両1に対して、事故発生通知を送信する(ステップS54)。
通知処理部51は、車両1から事故状況通知を通信部42にて受信したか否かを判定する(ステップS55)。事故状況通知を受信していない場合(S55:NO)、通知処理部51は、前回に車両1へ事故発生通知を送信してから所定時間が経過したか否かを判定する(ステップS56)。なお所定時間は、例えば数分〜数十分などとすることができる。所定時間が経過していない場合(S56:NO)、通知処理部51は、ステップS55へ処理を戻す。所定時間が経過した場合(S56:YES)、通知処理部51は、記憶部41の車両位置DB55を参照し、事故発生位置から所定範囲内に存在する車両1を通知対象の車両として選択する(ステップS57)。通知処理部51は、ステップS57にて選択した車両1に対して、事故発生通知を送信し(ステップS58)、ステップS55へ処理を戻す。
車両1から事故状況通知を受信した場合(S55:YES)、通知処理部51は、通知された画像を記憶部41の事故画像DB56に記憶する(ステップS59)。処理部40の判定処理部52は、ステップS59にて記憶した画像に基づいて、車両1による画像の取得を停止させるか否かを判定する停止判定処理を行う(ステップS60)。停止判定処理において判定処理部52は、例えば事故現場を写した画像から事故車両が撤去されたか否かなどを画像処理により判定することができる。判定処理部52は、停止判定処理の結果が車両1による画像の取得を停止させる結果であるか否かを判定する(ステップS61)。画像取得を停止させない判定結果である場合(S61:NO)、処理部40は、ステップS55へ処理を戻す。画像取得を停止させる判定結果である場合(S61:YES)、処理部40の停止要求処理部53は、例えば事故発生位置から所定範囲内に存在する車両1に対して停止要求を送信し(ステップS62)、処理を終了する。
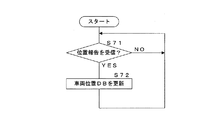
図10は、サーバ装置4が車両1からの位置報告を受信した場合に行う処理の手順を示すフローチャートである。サーバ装置10の処理部40は、通信部42にて車両1からの位置報告を受信したか否かを判定する(ステップS71)。位置報告を受信していない場合(S71:NO)、処理部40は、位置報告を受信するまで待機する。位置報告を受信した場合(S71:YES)、処理部40は、受信した位置報告に含まれる位置情報を取得して、記憶部41の車両位置DB55を更新し(ステップS72)、ステップS71へ処理を戻す。
以上の構成の本実施の形態に係る事故通知システムは、第1の車両1bに搭載された車載通知装置10は、事故検出部32にて事故発生を検出した場合に、車車間通信装置11にて第2の車両1c,1dへ事故発生位置情報を含む事故発生通知を送信すると共に、車両1外に設けられたサーバ装置4へ事故発生通知を送信する。車載通知装置10は、車載センサ13の検知結果又は車載カメラ14の撮像画像等に基づいて事故発生の検出を行うことができる。第1の車両1bの車載通知装置10が事故発生通知を第2の車両1c,1d及び車両1外のサーバ装置4の2ヶ所に対して送信する構成とすることにより、いずれか一方へのみ通知を行う構成と比較して、より確実に事故発生を通知することができる。
第2の車両1c,1dに搭載された車載通知装置10は、第1の車両1bからの事故発生通知を車車間通信装置11にて受信した場合に、通知された事故発生位置情報と、自車両の位置情報とが所定条件(例えば自車両の位置が事故発生位置から所定範囲内であるなど)を満たすか否かを判定する。所定条件を満たす場合、車載通知装置10は、車載カメラ14の撮像により得られた画像を自車両の位置情報と共に事故状況通知としてサーバ装置4へ送信する。これにより第2の車両1c,1dが事故発生個所の近傍に存在する場合又は近傍を走行する場合等に、車載通知装置10が事故発生個所周辺の撮像画像をサーバ装置4へ通知することができる。
車両1外に設けられたサーバ装置4は、第1の車両1bからの事故発生通知又は第2の車両1c,1dからの事故状況通知を受信した場合、通知された事故発生位置情報に基づく所定範囲内に存在する第3の車両1e,1fへ事故発生通知を行う。なおサーバ装置4による事故発生通知の送信範囲は、第1の車両1bの車車間通信による事故発生通知の送信範囲よりも広いことが好ましい。またサーバ装置4が事故発生通知を送信する第3の車両1には、第2の車両1を含み得る。
第3の車両1e,1fに搭載された車載通知装置10は、サーバ装置4からの事故発生通知を受信した場合に、通知された事故発生位置情報と、自車両の位置情報とが所定条件を満たすか否かを判定する。なお第3の車両1e,1bがサーバ装置4からの事故発生通知に応じて判定する所定条件と、第2の車両1c,1dが第1の車両1bからの事故発生通知に応じて判定する所定条件とは、同じ条件であってもよく、異なる条件であってもよい。所定条件を満たす場合、車載通知装置10は、車載カメラ14の撮像により得られた画像を自車両の位置情報と共に事故状況通知としてサーバ装置4へ送信する。これにより第3の車両1e,1fが事故発生個所の近傍に存在する場合又は近傍を走行する場合等に、車載通知装置10が事故発生個所周辺の撮像画像をサーバ装置4へ通知することができる。
これらの構成により本実施の形態に係る事故通知システムは、より広い範囲に存在する車両1へ事故に係る情報の取得を行わせることができ、事故又は災害等に係る情報を長期間に亘って通知することができる。
また車載通知装置10は、他の車両1から車車間通信による事故発生通知を受信した場合、及び、サーバ装置4から事故発生通知を受信した場合、事故発生位置情報と自車両の位置情報とが所定条件を満たすか否かの判定を継続的に行い、所定条件を満たすと判定した場合に車載カメラ14の撮像画像を取得してサーバ装置4へ事故状況通知を送信する。これにより、事故発生通知を受信した際には事故発生個所の周辺に車両1が存在していない場合であっても、その後の走行によって車両1が事故発生個所へ近付いた場合などに車載通知装置10が撮像画像の取得及び事故状況通知の送信を行うことができる。
またサーバ装置4は、車両1の車載通知装置10から通知された画像を記憶部41の事故画像DB56に記憶する。サーバ装置4は、例えば車両1から受信して記憶した画像に基づいて、更なる画像の取得が必要であるか否かを判定する。サーバ装置4は、例えば事故車両1a及び1bが事故現場から撤去された場合などに、事故処理が終了して更なる画像の取得が不要であると判定することができる。画像の取得が不要であると判定した場合、サーバ装置4は、車両1に対して停止要求を送信する。これにより、サーバ装置4からの事故発生通知に応じて位置判定などの処理を継続的に行っている車載通知装置10について処理を停止させることができ、不要な画像がサーバ装置4へ通知され続けることを防止できる。
なお本実施の形態においては、車両1の事故に関する通知を送受信する構成としたが、これに限るものではなく、例えば災害などの事故以外の現象についての通知を送受信する構成としてもよい。また事故発生通知を受信した車両1が車載カメラ14の撮像画像をサーバ装置4へ事故状況通知として送信する構成としたが、これに限るものではなく、車両1が画像以外の情報、例えば事故発生個所周辺の音声情報、温度情報又は天候情報等の種々の情報を車載センサにより取得してサーバ装置4へ送信する構成としてよい。事故発生を検出した第1の車両1bについても、車載カメラ14の撮像画像などの情報をサーバ装置4へ送信する構成としてよい。
また事故発生通知を受信した車載通知装置10が自車両の位置が事故発生位置から所定範囲内である場合に車載カメラ14の撮像を行って画像をサーバ装置4へ送信する構成としたが、撮像を行う条件は事故発生位置から所定範囲内に限らない。例えばカーナビゲーション装置などとの連携により地図情報を扱うことが可能である場合、車載通知装置10は、事故が発生した道路と同じ道路上を走行していることなどを更に判定してもよい。
またサーバ装置4は、事故発生位置から所定範囲内に存在する車両1へ事故発生通知を送信する構成としたが、サーバ装置4による事故発生通知の送信先となる車両1の選択条件はこれに限らない。例えばサーバ装置4は、各車両1の走行経路の予測などを行い、事故発生位置の周辺を走行することが予想される車両1へのみ事故発生通知を送信する構成としてもよい。
また車載通知装置10は、車載センサ13の検知結果及び/又は車載カメラ14の撮像画像に基づいて事故の発生を検出する構成としたが、これに限るものではない。車載通知装置10による事故検出の方法はどのようなものであってもよい。例えば車両1の運転席近傍に事故通知用のスイッチなどを設け、運転者によるスイッチ操作に応じて事故の発生を検出する構成としてもよい。
また車載カメラ14は、必要な場合に車載通知装置10からの命令で撮像を行うのではなく、常に撮像を行って画像をメモリなどに蓄積する構成であってもよい。車載通知装置10は、車載カメラ14が撮像した画像から必要なものを取得してサーバ装置4へ送信すればよい。またこの場合には、例えば事故を検出した第1の車両1b及び車車間通信で事故発生通知を受信した第2の車両1c,1dについて、事故発生前の画像をサーバ装置4へ送信する構成としてもよい。
1,1a〜1h 車両
4 サーバ装置
6,6a,6b 基地局
10 車載通知装置
11 車車間通信装置
12 無線通信装置
13 車載センサ
14 車載カメラ
15 GPS受信機
20 処理部
21 車車間通信部
22 無線通信部
23 センサ入力部
24 カメラI/F
25 GPS入力部
31 位置情報取得部
32 事故検出部
33 位置判定部
34 画像取得部
35 通知処理部
40 処理部
41 記憶部
42 通信部
51 通知処理部
52 判定処理部
53 停止要求処理部
55 車両位置DB
56 事故画像DB
4 サーバ装置
6,6a,6b 基地局
10 車載通知装置
11 車車間通信装置
12 無線通信装置
13 車載センサ
14 車載カメラ
15 GPS受信機
20 処理部
21 車車間通信部
22 無線通信部
23 センサ入力部
24 カメラI/F
25 GPS入力部
31 位置情報取得部
32 事故検出部
33 位置判定部
34 画像取得部
35 通知処理部
40 処理部
41 記憶部
42 通信部
51 通知処理部
52 判定処理部
53 停止要求処理部
55 車両位置DB
56 事故画像DB
Claims (6)
- 第1の車両に搭載され、前記第1の車両の位置情報を取得する位置情報取得部、前記第1の車両に係る事故の発生を検出する事故検出部が事故の発生を検出した場合に車車間通信により他車両へ前記位置情報取得部が取得した位置情報を通知する車車間通知部、及び、前記事故検出部が事故の発生を検出した場合に車両外の装置へ前記位置情報取得部が取得した位置情報を通知する車外通知部を有する第1車載通知装置と、
第2の車両に搭載され、前記第2の車両の位置情報を取得する位置情報取得部、車車間通信により前記第1車載通知装置からの通知を受信した場合に、該通知に係る位置情報及び前記位置情報取得部が取得する位置情報が所定条件を満たすか否かを判定する位置判定部、該位置判定部が所定条件を満たすと判定した場合に、前記第2の車両の周辺を撮像した画像を取得する周辺画像取得部、並びに、前記位置情報取得部が取得した位置情報及び前記周辺画像取得部が取得した画像を前記車両外の装置へ通知する車外通知部を有する第2車載通知装置と、
車両外に設けられ、前記第1車載通知装置又は前記第2車載通知装置からの通知を受信した場合に、該通知に係る位置情報に基づく所定範囲内の車両へ、前記位置情報を通知する通知部を有する事故通知装置と、
第3の車両に搭載され、前記第3の車両の位置情報を取得する位置情報取得部、前記事故通知装置からの通知を受信した場合に、該通知に係る位置情報及び前記位置情報取得部が取得する位置情報が所定条件を満たすか否かを判定する位置判定部、該位置判定部が所定条件を満たすと判定した場合に、前記第3の車両の周辺を撮像した画像を取得する周辺画像取得部、並びに、前記位置情報取得部が取得した位置情報及び前記周辺画像取得部が取得した画像を前記事故通知装置へ通知する車外通知部を有する第3車載通知装置と
を備えることを特徴とする事故通知システム。 - 前記第3車載通知装置は、前記位置情報取得部による位置情報の取得及び前記位置判定部による判定を継続的に行い、前記位置判定部が所定条件を満たすと判定した場合に、周辺画像取得部が前記第3の車両の周辺を撮像した画像を取得すること
を特徴とする請求項1に記載の事故通知システム。 - 前記事故通知装置は、
前記第2車載通知装置及び前記第3車載通知装置から通知された画像を記憶する記憶部と、
更なる画像の取得が必要であるか否かを判定する判定部と、
前記判定部が画像の取得が必要でないと判定した場合に、前記第3車載通知装置へ画像取得の停止を要求する停止要求部と
を有することを特徴とする請求項2に記載の事故通知システム。 - 第1の車両に搭載され、前記第1の車両の位置情報を取得する位置情報取得部、車車間通信により他車両へ前記位置情報取得部が取得した位置情報を通知する車車間通知部、及び、車両外の装置へ前記位置情報取得部が取得した位置情報を通知する車外通知部を有する第1車載通知装置と、
第2の車両に搭載され、前記第2の車両の位置情報を取得する位置情報取得部、車車間通信により前記第1車載通知装置からの通知を受信した場合に、該通知に係る位置情報及び前記位置情報取得部が取得する位置情報が所定条件を満たすか否かを判定する位置判定部、該位置判定部が所定条件を満たすと判定した場合に、前記第2の車両の周辺に係る情報を取得する周辺情報取得部、並びに、前記位置情報取得部が取得した位置情報及び前記周辺情報取得部が取得した情報を前記車両外の装置へ通知する車外通知部を有する第2車載通知装置と、
車両外に設けられ、前記第1車載通知装置又は前記第2車載通知装置からの通知を受信した場合に、該通知に係る位置情報に基づく所定範囲内の車両へ、前記位置情報を通知する通知部を有する通知装置と、
第3の車両に搭載され、前記第3の車両の位置情報を取得する位置情報取得部、前記通知装置からの通知を受信した場合に、該通知に係る位置情報及び前記位置情報取得部が取得する位置情報が所定条件を満たすか否かを判定する位置判定部、該位置判定部が所定条件を満たすと判定した場合に、前記第3の車両の周辺に係る情報を取得する周辺情報取得部、並びに、前記位置情報取得部が取得した位置情報及び前記周辺情報取得部が取得した情報を前記通知装置へ通知する車外通知部を有する第3車載通知装置と
を備えることを特徴とする通知システム。 - 車両に搭載され、
前記車両の位置情報を取得する位置情報取得部と、
前記車両外に設けられた事故通知装置から事故発生に係る位置情報の通知を受信した場合に、該通知に係る位置情報及び前記位置情報取得部が取得する位置情報が所定条件を満たすか否かを判定する位置判定部と、
該位置判定部が所定条件を満たすと判定した場合に、前記車両の周辺を撮像した画像を取得する周辺画像取得部と、
前記位置情報取得部が取得した位置情報及び前記周辺画像取得部が取得した画像を前記事故通知装置へ通知する車外通知部と
を備えることを特徴とする車載通知装置。 - 第1の車両に搭載された第1車載通知装置が、前記第1の車両に係る事故の発生を検出した場合に、車車間通信により他車両へ前記第1の車両の位置情報を通知し、
前記第1車載通知装置が、前記第1の車両に係る事故の発生を検出した場合に、車両外の装置へ前記第1の車両の位置情報を通知し、
第2の車両に搭載された第2車載通知装置が、車車間通信により前記第1車載通知装置からの通知を受信した場合に、該通知に係る位置情報及び前記第2の車両の位置情報が所定条件を満たすか否かを判定し、
前記第2車載通知装置が、前記所定条件を満たすと判定した場合に、前記第2の車両の位置情報及び前記第2の車両の周辺を撮像した画像を前記車両外の装置へ通知し、
車両外に設けられた事故通知装置が、前記第1車載通知装置又は前記第2車載通知装置からの通知を受信した場合に、該通知に係る位置情報に基づく所定範囲内の車両へ、前記位置情報を通知し、
第3の車両に搭載された第3車載通知装置が、前記事故通知装置からの通知を受信した場合に、該通知に係る位置情報及び前記第3の車両の位置情報が所定条件を満たすか否かを判定し、
前記第3車載通知装置が、前記所定条件を満たすと判定した場合に、前記第3の車両の位置情報及び前記第3の車両の周辺を撮像した画像を前記事故通知装置へ通知すること
を特徴とする事故通知方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015248788A JP2017117005A (ja) | 2015-12-21 | 2015-12-21 | 事故通知システム、通知システム、車載通知装置及び事故通知方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015248788A JP2017117005A (ja) | 2015-12-21 | 2015-12-21 | 事故通知システム、通知システム、車載通知装置及び事故通知方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017117005A true JP2017117005A (ja) | 2017-06-29 |
Family
ID=59231843
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015248788A Pending JP2017117005A (ja) | 2015-12-21 | 2015-12-21 | 事故通知システム、通知システム、車載通知装置及び事故通知方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2017117005A (ja) |
Cited By (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018230073A1 (ja) | 2017-06-14 | 2018-12-20 | 株式会社ヨコオ | アンテナ装置 |
| JP2019021187A (ja) * | 2017-07-20 | 2019-02-07 | 株式会社 日立産業制御ソリューションズ | 映像蓄積配信システム |
| JP2020030532A (ja) * | 2018-08-21 | 2020-02-27 | 本田技研工業株式会社 | 制御装置及びプログラム |
| JP2020087217A (ja) * | 2018-11-29 | 2020-06-04 | トヨタ自動車株式会社 | 情報提供システム、サーバ、車載装置、車両、プログラム及び情報提供方法 |
| CN111464736A (zh) * | 2019-01-18 | 2020-07-28 | 丰田自动车株式会社 | 服务器、服务器控制方法、车辆、车辆控制方法以及存储程序的存储介质 |
| JP2020140237A (ja) * | 2019-02-26 | 2020-09-03 | トヨタ自動車株式会社 | 車載用情報処理装置、車両間情報処理システム、及び情報処理システム |
| JP2021047666A (ja) * | 2019-09-19 | 2021-03-25 | Kddi株式会社 | 情報処理装置、情報処理システム、情報処理方法、及びプログラム |
| JP2021152938A (ja) * | 2019-06-21 | 2021-09-30 | ビッグローブ株式会社 | 捜査支援システム及び捜査支援方法 |
| US20210334883A1 (en) * | 2017-10-16 | 2021-10-28 | Allstate Insurance Company | Geotagging Location Data |
| JP2021536648A (ja) * | 2018-09-04 | 2021-12-27 | ケンブリッジ モバイル テレマティクス, インク.Cambridge Mobile Telematics, Inc. | ドライバの挙動を分類するためのシステムおよび方法 |
| US11423772B2 (en) | 2019-01-16 | 2022-08-23 | Denso Corporation | Anomaly detector, anomaly detection program, anomaly detection method, anomaly detection system, and in-vehicle device |
| JP2023095133A (ja) * | 2021-12-24 | 2023-07-06 | 株式会社デンソー | 情報通知システム、管理装置、エッジ装置、情報通知方法、管理装置の運用方法、及びプログラム |
| JP2024153740A (ja) * | 2021-01-15 | 2024-10-29 | 日本電気株式会社 | 管理システム、管理方法、およびプログラム |
| JP2025183272A (ja) * | 2021-09-27 | 2025-12-16 | 株式会社Jvcケンウッド | 端末装置、危険情報通知方法およびプログラム |
-
2015
- 2015-12-21 JP JP2015248788A patent/JP2017117005A/ja active Pending
Cited By (31)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018230073A1 (ja) | 2017-06-14 | 2018-12-20 | 株式会社ヨコオ | アンテナ装置 |
| JP2019021187A (ja) * | 2017-07-20 | 2019-02-07 | 株式会社 日立産業制御ソリューションズ | 映像蓄積配信システム |
| US20210334883A1 (en) * | 2017-10-16 | 2021-10-28 | Allstate Insurance Company | Geotagging Location Data |
| US12056755B2 (en) * | 2017-10-16 | 2024-08-06 | Allstate Insurance Company | Geotagging location data |
| US11322026B2 (en) | 2018-08-21 | 2022-05-03 | Honda Motor Co., Ltd. | Control device and computer readable storage medium |
| JP7100536B2 (ja) | 2018-08-21 | 2022-07-13 | 本田技研工業株式会社 | 制御装置及びプログラム |
| JP2020030532A (ja) * | 2018-08-21 | 2020-02-27 | 本田技研工業株式会社 | 制御装置及びプログラム |
| JP2021536648A (ja) * | 2018-09-04 | 2021-12-27 | ケンブリッジ モバイル テレマティクス, インク.Cambridge Mobile Telematics, Inc. | ドライバの挙動を分類するためのシステムおよび方法 |
| US12561585B2 (en) | 2018-09-04 | 2026-02-24 | Cambridge Mobile Telematics Inc. | Systems and methods for classifying driver behavior |
| JP7499256B2 (ja) | 2018-09-04 | 2024-06-13 | ケンブリッジ モバイル テレマティクス,インク. | ドライバの挙動を分類するためのシステムおよび方法 |
| JP2020087217A (ja) * | 2018-11-29 | 2020-06-04 | トヨタ自動車株式会社 | 情報提供システム、サーバ、車載装置、車両、プログラム及び情報提供方法 |
| JP7192443B2 (ja) | 2018-11-29 | 2022-12-20 | トヨタ自動車株式会社 | 情報提供システム、サーバ、車載装置、車両、プログラム及び情報提供方法 |
| US11423772B2 (en) | 2019-01-16 | 2022-08-23 | Denso Corporation | Anomaly detector, anomaly detection program, anomaly detection method, anomaly detection system, and in-vehicle device |
| US11694547B2 (en) | 2019-01-18 | 2023-07-04 | Toyota Jidosha Kabushiki Kaisha | Server, server control method, server control program, vehicle, vehicle control method, and vehicle control program |
| CN111464736A (zh) * | 2019-01-18 | 2020-07-28 | 丰田自动车株式会社 | 服务器、服务器控制方法、车辆、车辆控制方法以及存储程序的存储介质 |
| US11398151B2 (en) | 2019-01-18 | 2022-07-26 | Toyota Jidosha Kabushiki Kaisha | Server, server control method, server control program, vehicle, vehicle control method, and vehicle control program |
| US11631321B2 (en) | 2019-01-18 | 2023-04-18 | Toyota Jidosha Kabushiki Kaisha | Server, server control method, server control program, vehicle, vehicle control method, and vehicle control program |
| JP2020140237A (ja) * | 2019-02-26 | 2020-09-03 | トヨタ自動車株式会社 | 車載用情報処理装置、車両間情報処理システム、及び情報処理システム |
| JP7131433B2 (ja) | 2019-02-26 | 2022-09-06 | トヨタ自動車株式会社 | 車載用情報処理装置、車両間情報処理システム、及び情報処理システム |
| JP2021152938A (ja) * | 2019-06-21 | 2021-09-30 | ビッグローブ株式会社 | 捜査支援システム及び捜査支援方法 |
| JP7281505B2 (ja) | 2019-06-21 | 2023-05-25 | ビッグローブ株式会社 | 捜査支援システム及び捜査支援方法 |
| JP7428682B2 (ja) | 2019-06-21 | 2024-02-06 | ビッグローブ株式会社 | 捜査支援システム及び捜査支援方法 |
| JP2021166065A (ja) * | 2019-06-21 | 2021-10-14 | ビッグローブ株式会社 | 捜査支援システム及び捜査支援方法 |
| JP7023909B2 (ja) | 2019-09-19 | 2022-02-22 | Kddi株式会社 | 情報処理装置、情報処理システム、情報処理方法、及びプログラム |
| JP2021047666A (ja) * | 2019-09-19 | 2021-03-25 | Kddi株式会社 | 情報処理装置、情報処理システム、情報処理方法、及びプログラム |
| JP2024153740A (ja) * | 2021-01-15 | 2024-10-29 | 日本電気株式会社 | 管理システム、管理方法、およびプログラム |
| JP7747136B2 (ja) | 2021-01-15 | 2025-10-01 | 日本電気株式会社 | 管理システム、管理方法、およびプログラム |
| US12469286B2 (en) | 2021-01-15 | 2025-11-11 | Nec Corporation | Information processing apparatus, information processing method, and program |
| JP2025183272A (ja) * | 2021-09-27 | 2025-12-16 | 株式会社Jvcケンウッド | 端末装置、危険情報通知方法およびプログラム |
| JP2023095133A (ja) * | 2021-12-24 | 2023-07-06 | 株式会社デンソー | 情報通知システム、管理装置、エッジ装置、情報通知方法、管理装置の運用方法、及びプログラム |
| JP7838272B2 (ja) | 2021-12-24 | 2026-04-01 | 株式会社デンソー | 情報通知システム、管理装置、エッジ装置、情報通知方法、管理装置の運用方法、及びプログラム |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2017117005A (ja) | 事故通知システム、通知システム、車載通知装置及び事故通知方法 | |
| JP6801619B2 (ja) | データ転送経路算出装置およびデータ転送端末 | |
| CN106462729B (zh) | 车辆图像数据管理系统和方法 | |
| KR101676940B1 (ko) | 클라우드 플랫폼에 기반한 교통안전 정보 제공 시스템 및 그것을 이용한 교통안전 정보 제공 방법 | |
| JP2017151798A (ja) | 道路異常警告システム及び車載機 | |
| KR20170081920A (ko) | 차량과 관련된 영상 정보를 공유하는 방법 및 장치 | |
| CN105849790A (zh) | 一种路况信息获取方法 | |
| JP2012098105A (ja) | 事故発生場所周辺の映像収集システム | |
| JP2008102762A (ja) | 画像収集システム、記録装置 | |
| JP2017107429A (ja) | 道路異常判定装置、道路異常報知システムおよび道路異常報知方法 | |
| JP5260186B2 (ja) | 安全支援装置、安全支援システム及び安全支援方法 | |
| DE102008016227A1 (de) | Übertragung eines Notrufs mit Adressdaten | |
| JP2012198599A (ja) | 記録装置 | |
| JP2007323117A (ja) | 道路通信システム、移動体装置、および、移動体装置の情報処理方法 | |
| JP2018180860A (ja) | 交通情報システム | |
| JP2022118371A (ja) | 車両映像収集システム | |
| JP2025072650A (ja) | 情報処理装置 | |
| US20190143926A1 (en) | Vehicle management system, inspection information transmission system, information management system, vehicle management program, inspection information transmission program, and information management program | |
| JP2007334574A (ja) | 緊急通報装置および緊急通報システムならびに緊急車両案内システム | |
| JP6569460B2 (ja) | 情報収集システム | |
| CN113612673A (zh) | 自动紧急制动数据采集方法、系统及车辆 | |
| JP2010146443A (ja) | 車載カメラ制御システム | |
| CN113383352B (zh) | 用于自动构建行驶视频的系统和方法 | |
| JP2022127838A (ja) | 車両映像収集システム | |
| JP2022118321A (ja) | 車両映像収集システム |