JP2017140660A - 作業ロボット - Google Patents
作業ロボット Download PDFInfo
- Publication number
- JP2017140660A JP2017140660A JP2016022162A JP2016022162A JP2017140660A JP 2017140660 A JP2017140660 A JP 2017140660A JP 2016022162 A JP2016022162 A JP 2016022162A JP 2016022162 A JP2016022162 A JP 2016022162A JP 2017140660 A JP2017140660 A JP 2017140660A
- Authority
- JP
- Japan
- Prior art keywords
- robot
- robot arm
- housing member
- contact
- fluid
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/06—Safety devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/08—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices
- B25J13/081—Touching devices, e.g. pressure-sensitive
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/08—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices
- B25J13/087—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices for sensing other physical parameters, e.g. electrical or chemical properties
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/0091—Shock absorbers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/06—Safety devices
- B25J19/063—Safety devices working only upon contact with an outside object
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/0009—Constructional details, e.g. manipulator supports, bases
- B25J9/0012—Constructional details, e.g. manipulator supports, bases making use of synthetic construction materials, e.g. plastics, composites
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1674—Program controls characterised by safety, monitoring, diagnostic
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1694—Program controls characterised by use of sensors other than normal servo-feedback from position, speed or acceleration sensors, perception control, multi-sensor controlled systems, sensor fusion
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Human Computer Interaction (AREA)
- Manipulator (AREA)
Abstract
Description
2 ロボット基台
3 ロボットアーム
4 ロボットコントローラ
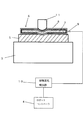
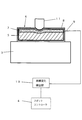
5 衝撃緩衝部材
6 接触検出手段
7 スポンジ部材
8 収容部材
9 流体排出管
10 容積変化検出部
11 物体(人や障害物)
Claims (12)
- ロボットアームと、
前記ロボットアームの表面に設けられ、前記ロボットアームが物体と接触した際の衝撃を緩和するための衝撃緩衝部材と、
前記ロボットアームと前記物体との接触を検出するための接触検出手段と、を備え、
前記接触検出手段は、
前記衝撃緩衝部材の表面側に設けられ、前記衝撃緩衝部材よりも柔らかい軟性多孔質部材と、
前記軟性多孔質部材を内包し、可撓性材料で形成された収容部材と、
前記収容部材の内部に連通する流体排出管であって、前記収容部材に前記物体が接触して前記収容部材の容積が減少したときに前記収容部材の内部の流体を排出する、流体排出管と、
前記流体排出管を介して排出された前記流体を利用して前記収容部材の容積が変化したことを検出するための容積変化検出部と、を有する、ことを特徴とする作業ロボット。 - 前記ロボットアームの駆動を制御するためのロボットコントローラをさらに備え、
前記ロボットコントローラは、前記容積変化検出部からの検出信号に基づいて前記ロボットアームの駆動を制御するように構成されている、請求項1記載の作業ロボット。 - 前記ロボットコントローラは、既知の物体に対して所定の動作で前記ロボットアームを接触させ、その際の前記容積変化検出部からの検出信号に基づいて、前記接触検出手段が正常に動作するか否かを確認するように構成されている、請求項1または2に記載の作業ロボット。
- 前記既知の物体は、前記作業ロボットの一部を構成する構造体である、請求項3記載の作業ロボット。
- 前記衝撃緩衝部材は、前記収容部材の外部に配置されている、請求項1乃至4のいずれか一項に記載の作業ロボット。
- 前記衝撃緩衝部材は、前記収容部材の内部に配置されている、請求項1乃至4のいずれか一項に記載の作業ロボット。
- 前記流体は、空気である、請求項1乃至6のいずれか一項に記載の作業ロボット。
- ロボットアームと、
前記ロボットアームの表面に設けられ、前記ロボットアームと前記物体との接触を検出するための接触検出手段と、を備え、
前記接触検出手段は、
前記ロボットアームが物体と接触した際の衝撃を緩和する機能を有する軟性多孔質部材と、
前記軟性多孔質部材を内包し、可撓性材料で形成された収容部材と、
前記収容部材の内部に連通する流体排出管であって、前記収容部材に前記物体が接触して前記収容部材の容積が減少したときに前記収容部材の内部の流体を排出する、流体排出管と、
前記流体排出管を介して排出された前記流体を利用して前記収容部材の容積が変化したことを検出するための容積変化検出部と、を有する、ことを特徴とする作業ロボット。 - 前記ロボットアームの駆動を制御するためのロボットコントローラをさらに備え、
前記ロボットコントローラは、前記容積変化検出部からの検出信号に基づいて前記ロボットアームの駆動を制御するように構成されている、請求項8記載の作業ロボット。 - ロボットアームと、
前記ロボットアームの表面に設けられ、前記ロボットアームと前記物体との接触を検出するための接触検出手段と、を備え、
前記接触検出手段は、
軟性多孔質部材と、
前記軟性多孔質部材を内包し、可撓性材料で形成された収容部材と、
前記収容部材の内部に連通する流体排出管であって、前記収容部材に前記物体が接触して前記収容部材の容積が減少したときに前記収容部材の内部の流体を排出する、流体排出管と、
前記流体排出管を介して排出された前記流体を利用して前記収容部材の容積が変化したことを検出するための容積変化検出部と、を有する、ことを特徴とする作業ロボット。 - 前記ロボットアームの少なくとも一部は、前記ロボットアームが物体と接触した際の衝撃を緩和するための衝撃緩衝部材で形成されており、
前記収容部材は、前記衝撃緩衝部材の表面に設けられている、請求項10記載の作業ロボット。 - 前記ロボットアームの駆動を制御するためのロボットコントローラをさらに備え、
前記ロボットコントローラは、前記容積変化検出部からの検出信号に基づいて前記ロボットアームの駆動を制御するように構成されている、請求項10または11に記載の作業ロボット。
Priority Applications (7)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016022162A JP6850538B2 (ja) | 2016-02-08 | 2016-02-08 | 作業ロボット |
| DE112017000700.3T DE112017000700B4 (de) | 2016-02-08 | 2017-02-07 | Industrieroboter |
| PCT/JP2017/004402 WO2017138524A1 (ja) | 2016-02-08 | 2017-02-07 | 作業ロボット |
| CN201780010391.7A CN108602194B (zh) | 2016-02-08 | 2017-02-07 | 作业机器人 |
| KR1020187025744A KR102205658B1 (ko) | 2016-02-08 | 2017-02-07 | 작업 로봇 |
| US16/076,642 US11123883B2 (en) | 2016-02-08 | 2017-02-07 | Work robot |
| US17/320,837 US11679515B2 (en) | 2016-02-08 | 2021-05-14 | Work robot |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016022162A JP6850538B2 (ja) | 2016-02-08 | 2016-02-08 | 作業ロボット |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017140660A true JP2017140660A (ja) | 2017-08-17 |
| JP6850538B2 JP6850538B2 (ja) | 2021-03-31 |
Family
ID=59563153
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016022162A Active JP6850538B2 (ja) | 2016-02-08 | 2016-02-08 | 作業ロボット |
Country Status (6)
| Country | Link |
|---|---|
| US (2) | US11123883B2 (ja) |
| JP (1) | JP6850538B2 (ja) |
| KR (1) | KR102205658B1 (ja) |
| CN (1) | CN108602194B (ja) |
| DE (1) | DE112017000700B4 (ja) |
| WO (1) | WO2017138524A1 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109465821A (zh) * | 2017-09-07 | 2019-03-15 | 发那科株式会社 | 机器人系统 |
| WO2020045396A1 (ja) * | 2018-08-30 | 2020-03-05 | 川崎重工業株式会社 | 緩衝装置及びそれを備えるロボット |
| KR20200074099A (ko) * | 2017-10-26 | 2020-06-24 | 꼼마우 에스.피.에이. | 가동형 구조체을 갖는 자동화된 장치, 특히 로봇 |
| KR102518302B1 (ko) * | 2022-09-25 | 2023-04-06 | (주) 마가커피 | 인공지능 카메라에 기반한 협동 로봇 토탈 제어 시스템 |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6794800B2 (ja) * | 2016-11-29 | 2020-12-02 | セイコーエプソン株式会社 | ロボット |
| US12552034B2 (en) | 2021-12-25 | 2026-02-17 | Mantis Robotics, Inc. | Robot system |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0811085A (ja) * | 1994-06-28 | 1996-01-16 | Toyota Motor Corp | ロボット |
| EP1810795A1 (en) * | 2006-01-19 | 2007-07-25 | Abb Ab | Safety device for an industrial robot with elastic sealed bag comprising a fluid or gas |
| JP2015123505A (ja) * | 2013-12-25 | 2015-07-06 | ファナック株式会社 | 保護部材を有する人協調型産業用ロボット |
Family Cites Families (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS54146371A (en) * | 1978-05-10 | 1979-11-15 | Kobe Steel Ltd | Safety apparatus for robot |
| JPS6133894A (ja) | 1984-07-25 | 1986-02-17 | 神鋼電機株式会社 | 産業用ロボツトの安全ア−ム及び安全ハンド |
| JPS6339786A (ja) | 1986-08-05 | 1988-02-20 | 松下電器産業株式会社 | 工業用ロボツトの安全装置 |
| JP3249424B2 (ja) | 1997-03-13 | 2002-01-21 | 川崎重工業株式会社 | 光学式ロボット用接触センサ |
| JP2004034251A (ja) | 2002-07-05 | 2004-02-05 | Mitsubishi Heavy Ind Ltd | 圧力感知センサ及び該センサを備えたロボット |
| CN100358682C (zh) * | 2004-09-09 | 2008-01-02 | 山东鲁能智能技术有限公司 | 热交换器受热面管道检测机器人 |
| US8676379B2 (en) | 2006-07-04 | 2014-03-18 | Panasonic Corporation | Device and method for controlling robot arm, robot, and robot arm control program |
| CN102079094B (zh) * | 2009-11-26 | 2013-11-06 | 鸿富锦精密工业(深圳)有限公司 | 机器人结构 |
| JP2009229453A (ja) | 2008-02-28 | 2009-10-08 | Seiko Epson Corp | 圧力検出装置及び圧力検出方法 |
| JP2010214474A (ja) | 2009-03-13 | 2010-09-30 | Panasonic Corp | マニピュレータ |
| WO2011001569A1 (ja) * | 2009-07-02 | 2011-01-06 | パナソニック株式会社 | ロボット、ロボットアームの制御装置、及びロボットアームの制御プログラム |
| DE102010063214A1 (de) | 2010-12-16 | 2012-06-21 | Robert Bosch Gmbh | Sicherungseinrichtung für eine Handhabungsvorrichtung, insbesondere einen Industrieroboter, sowie Verfahren zum Betreiben der Sicherungseinrichtung |
| US20140316571A1 (en) * | 2013-04-22 | 2014-10-23 | Quanta Storage Inc. | Articulation module for a robot and control method for the same |
| CN104608113B (zh) * | 2013-11-01 | 2018-07-17 | 精工爱普生株式会社 | 机器人、机器人系统以及机器人控制装置 |
| JP5931167B1 (ja) * | 2014-12-11 | 2016-06-08 | ファナック株式会社 | 人間協調型ロボットシステム |
| EP3222394A3 (en) * | 2016-03-25 | 2017-10-18 | Seiko Epson Corporation | Robot and external-force detecting device |
| JP6794800B2 (ja) * | 2016-11-29 | 2020-12-02 | セイコーエプソン株式会社 | ロボット |
| AT519655B1 (de) * | 2017-04-24 | 2018-09-15 | Blue Danube Robotics Gmbh | Erkennung einer Kollision eines Handhabungsgeräts mit einem Hindernis |
| JP2019000930A (ja) * | 2017-06-13 | 2019-01-10 | 住友理工株式会社 | 安全装置 |
| JP2020179443A (ja) * | 2019-04-24 | 2020-11-05 | ファナック株式会社 | 水平多関節ロボット |
| US12447606B2 (en) * | 2021-07-05 | 2025-10-21 | Mantis Robotics, Inc. | Safety system for hand-guiding a robot |
-
2016
- 2016-02-08 JP JP2016022162A patent/JP6850538B2/ja active Active
-
2017
- 2017-02-07 WO PCT/JP2017/004402 patent/WO2017138524A1/ja not_active Ceased
- 2017-02-07 DE DE112017000700.3T patent/DE112017000700B4/de active Active
- 2017-02-07 KR KR1020187025744A patent/KR102205658B1/ko active Active
- 2017-02-07 US US16/076,642 patent/US11123883B2/en active Active
- 2017-02-07 CN CN201780010391.7A patent/CN108602194B/zh active Active
-
2021
- 2021-05-14 US US17/320,837 patent/US11679515B2/en active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0811085A (ja) * | 1994-06-28 | 1996-01-16 | Toyota Motor Corp | ロボット |
| EP1810795A1 (en) * | 2006-01-19 | 2007-07-25 | Abb Ab | Safety device for an industrial robot with elastic sealed bag comprising a fluid or gas |
| JP2015123505A (ja) * | 2013-12-25 | 2015-07-06 | ファナック株式会社 | 保護部材を有する人協調型産業用ロボット |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109465821A (zh) * | 2017-09-07 | 2019-03-15 | 发那科株式会社 | 机器人系统 |
| JP2019042907A (ja) * | 2017-09-07 | 2019-03-22 | ファナック株式会社 | ロボットシステム |
| US11440188B2 (en) | 2017-09-07 | 2022-09-13 | Fanuc Corporation | Robot system |
| KR20200074099A (ko) * | 2017-10-26 | 2020-06-24 | 꼼마우 에스.피.에이. | 가동형 구조체을 갖는 자동화된 장치, 특히 로봇 |
| KR102474080B1 (ko) | 2017-10-26 | 2022-12-05 | 꼼마우 에스.피.에이. | 가동형 구조체을 갖는 자동화된 장치, 특히 로봇 |
| WO2020045396A1 (ja) * | 2018-08-30 | 2020-03-05 | 川崎重工業株式会社 | 緩衝装置及びそれを備えるロボット |
| JP2020032493A (ja) * | 2018-08-30 | 2020-03-05 | 川崎重工業株式会社 | 緩衝装置及びそれを備えるロボット |
| JP7156865B2 (ja) | 2018-08-30 | 2022-10-19 | 川崎重工業株式会社 | 緩衝装置及びそれを備えるロボット |
| KR102518302B1 (ko) * | 2022-09-25 | 2023-04-06 | (주) 마가커피 | 인공지능 카메라에 기반한 협동 로봇 토탈 제어 시스템 |
| WO2024063625A1 (ko) * | 2022-09-25 | 2024-03-28 | (주) 마가커피 | 인공지능 카메라에 기반한 협동 로봇 토탈 제어 시스템 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20190039254A1 (en) | 2019-02-07 |
| WO2017138524A1 (ja) | 2017-08-17 |
| JP6850538B2 (ja) | 2021-03-31 |
| CN108602194B (zh) | 2021-09-10 |
| CN108602194A (zh) | 2018-09-28 |
| US11123883B2 (en) | 2021-09-21 |
| KR102205658B1 (ko) | 2021-01-21 |
| US11679515B2 (en) | 2023-06-20 |
| DE112017000700T5 (de) | 2018-10-18 |
| US20210268669A1 (en) | 2021-09-02 |
| KR20180108801A (ko) | 2018-10-04 |
| DE112017000700B4 (de) | 2022-06-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2017138524A1 (ja) | 作業ロボット | |
| US9475200B2 (en) | Safety device for a handling apparatus, in particular an industrial robot, and method for operating the safety device | |
| CN103249530B (zh) | 运行搬运装置用的防护装置的方法、防护装置和搬运装置 | |
| CN107877548B (zh) | 进行作业员与机器人的协同作业的生产系统 | |
| JP5149416B2 (ja) | ロボットの異常検出機能を有するロボットシステム及びその制御方法 | |
| CN103386684B (zh) | 一种防止机器人产生意外碰撞的装置及设计方法 | |
| EP1810795A1 (en) | Safety device for an industrial robot with elastic sealed bag comprising a fluid or gas | |
| JP4550849B2 (ja) | アーム搭載移動ロボット | |
| US10828791B2 (en) | Human-cooperative industrial robot including protection member | |
| CN105690383A (zh) | 人机协调机器人系统 | |
| JP2006021287A (ja) | ロボットの接触力検出装置 | |
| CN107263549A (zh) | 机器人以及外力探测装置 | |
| US12447606B2 (en) | Safety system for hand-guiding a robot | |
| JP5177008B2 (ja) | ロボットの制御装置およびロボット | |
| CN106272564A (zh) | 机器人防跌倒系统 | |
| JP2009090717A (ja) | 衝突判定装置、及び乗員保護装置 | |
| KR20170004088A (ko) | 로봇 관절 검사 장치 및 이를 위한 방법 | |
| JP2006219219A (ja) | エレベータ緩衝装置 | |
| TWI671055B (zh) | 充氣式裝置、具有充氣式裝置的系統及其控制方法 | |
| CN109254295B (zh) | 防碰撞检测装置、方法和设备 | |
| US20210146550A1 (en) | Device for controlling a handling device | |
| JP7401297B2 (ja) | バランサの異常検出システム及びバランサの異常検出方法 | |
| JP2020188392A (ja) | ステレオイヤホン及び判定装置 | |
| JP4383123B2 (ja) | 移動ロボット | |
| KR20130009316A (ko) | 충격 센서가 내장된 로봇 제어 장치 및 이를 이용한 로봇 제어 방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190123 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200120 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20200323 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200519 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200702 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20200821 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20201027 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210205 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210308 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6850538 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |