KR20200074099A - 가동형 구조체을 갖는 자동화된 장치, 특히 로봇 - Google Patents
가동형 구조체을 갖는 자동화된 장치, 특히 로봇 Download PDFInfo
- Publication number
- KR20200074099A KR20200074099A KR1020207009701A KR20207009701A KR20200074099A KR 20200074099 A KR20200074099 A KR 20200074099A KR 1020207009701 A KR1020207009701 A KR 1020207009701A KR 20207009701 A KR20207009701 A KR 20207009701A KR 20200074099 A KR20200074099 A KR 20200074099A
- Authority
- KR
- South Korea
- Prior art keywords
- covering
- sensored
- layer
- electrically conductive
- modules
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images












Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/08—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices
- B25J13/081—Touching devices, e.g. pressure-sensitive
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/08—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices
- B25J13/081—Touching devices, e.g. pressure-sensitive
- B25J13/084—Tactile sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/08—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices
- B25J13/086—Proximity sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/06—Safety devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/06—Safety devices
- B25J19/063—Safety devices working only upon contact with an outside object
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/0009—Constructional details, e.g. manipulator supports, bases
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1674—Program controls characterised by safety, monitoring, diagnostic
- B25J9/1676—Avoiding collision or forbidden zones
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/063—Automatically guided
-
- G—PHYSICS
- G08—SIGNALLING
- G08C—TRANSMISSION SYSTEMS FOR MEASURED VALUES, CONTROL OR SIMILAR SIGNALS
- G08C23/00—Non-electrical signal transmission systems, e.g. optical systems
- G08C23/04—Non-electrical signal transmission systems, e.g. optical systems using light waves, e.g. infrared
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Robotics (AREA)
- Human Computer Interaction (AREA)
- Structural Engineering (AREA)
- Transportation (AREA)
- Geology (AREA)
- Life Sciences & Earth Sciences (AREA)
- Civil Engineering (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Manipulator (AREA)
- Telephone Set Structure (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
- Force Measurement Appropriate To Specific Purposes (AREA)
Abstract
Description
도 2는 본 발명의 가능한 실시예에 따른 센서화된 커버링을 갖는, 도 1의 장치의 일부의 개략적인 사시도이다.
도 3은 도 2의 장치의 일부의 부분 분해도이다.
도 4 및 도 5는, 가능한 실시예에 따른 자동화된 장치에서 사용될 수 있는 센서화된 커버링의 2개의 모듈을, 분리되어 있는 조건과 함께 결합되어 있는 조건에서 각각 도시한 개략적인 사시도이다.
도 6은 본 발명의 가능한 실시예에 따른 센서화된 커버링의 커버링 모듈의 가능한 층상형 구성의 개략적인 단면도이다.
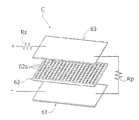
도 7은 본 발명의 가능한 실시예에 따른 센서화된 커버링의 커버링 모듈에서 사용될 수 있는 접촉 센서 장치의 분해 개략도이다.
도 8은 도 7에 도시된 유형의 접촉 센서 장치의 2개의 상이한 조건을 도시하는 것을 목적으로 하는 부분적이고 개략적인 단면도이다.
도 9는 본 발명의 가능한 실시예에 따른 센서화된 커버링의 일부 커버링 모듈의 전기 연결에 대한 가능한 구성의 부분적인 개략도이다.
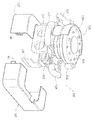
도 10은 가능한 실시예에 따른 또 다른 자동화된 장치의 개략적인 사시도이다.
도 11은 커버링 모듈이 생략된 상태의, 도 10의 장치의 부분적인 분해 개략도이다.
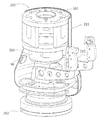
도 12는 본 발명의 가능한 실시예에 따른 추가적인 자동화된 장치의 개략적인 사시도이다.
도 13은 커버링 모듈이 생략된 상태의, 도 12의 장치의 개략적인 사시도이다.
도 14는 본 발명의 가능한 실시예에 따른 추가적인 자동화된 장치의 개략적인 사시도이다.
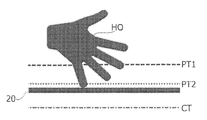
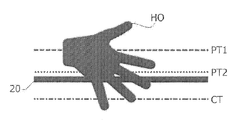
도 15, 도 16 및 도 17은 본 발명의 가능한 실시예에 따른 센서화된 커버링의 가능한 동작 조건을 나타내는 것을 목적으로 하는 개략도이다.
Claims (14)
- 특히 로봇인 자동화된 장치(1, 15; 100; 200; 300)이며,
- 가동형 구조체(4 내지 8; 103; 203; 301);
- 가동형 구조체(4 내지 8; 103; 203; 301)의 변위를 야기하는 액추에이터 수단(M; 102; 202);
- 액추에이터 수단(M; 102; 202)을 제어하도록 구성되는 제어 시스템(15, 50; 303); 및
- 가동형 구조체(4 내지 8; 103; 203; 301)의 적어도 일부를 커버하는 센서화된 커버링(20; 120; 220; 320)을 포함하고,
센서화된 커버링(20; 120; 220; 320)은 센서 수단(C, P)을 갖는 하나 이상의 센서화된 커버링 모듈(23, 24, 28, 29)을 포함하는 복수의 커버링 모듈(21 내지 39; 110 내지 113; 210 및 211; 321 내지 328)을 포함하며,
각각의 센서화된 커버링 모듈(23, 24, 28, 29)은 복수의 중첩된 별개의 층(40, 60 내지 67)을 포함하는 구조를 갖고, 이는 강성 또는 반-강성 재료로 제조되고 미리 정의된 형상을 갖는 하중-지탱 층(40), 및 하중-지탱 층(40)에 의해 유지되고 탄성 압축 가능 재료로 제조되는 적어도 하나의 완충 층(60, 64, 65)을 포함하며,
각각의 센서화된 커버링 모듈(23, 24, 28, 29)은 적어도 하나의 접촉 센서 장치(C)를 통합하고, 이는 제1 하부 전기 전도성 층(61) 및 제2 상부 전기 전도성 층(63)을, 그 사이에 전기 절연성 층(62)이 그 사이에 설정되게 포함하며,
접촉 센서 장치(C)의 전기 절연성 층(62)은 탄성 압축 가능 재료로 제조되며 복수의 관통 개구(62a)를 갖고, 복수의 관통 개구(62a)는 제1 하부 전기 전도성 층(61) 및 제2 상부 전기 전도성 층(63)이 상기 관통 개구(62a)에서 서로 국부적으로 대면하는 방식으로 배열되는, 자동화된 장치(1, 15; 100; 200; 300). - 제1항에 있어서, 접촉 센서 장치(C)는:
- 제1 하부 전기 전도성 층(61) 및 제2 상부 전기 전도성 층(63)에 각각 연결되어 그 사이의 전위차를 적용하기 위한 제1 전기 전도체(-) 및 제2 전기 전도체(+); 및
- 적어도 2개의 저항기(Rs, Rp)로서, 제1 저항기(Rp)는 제1 하부 전기 전도성 층(61)과 제2 상부 전기 전도성 층(63) 사이에 연결되고, 제2 저항기(Rs)는 제1 전기 전도체(-) 및 제2 전기 전도체(+) 중 하나에 연결되는, 저항기(Rs, Rp)를 포함하고,
제1 저항기(Rp) 및 제2 저항기(Rs)는 바람직하게는 상이한 전기 저항 값을 가지며, 제1 저항기(Rp)의 전기 저항 값은 바람직하게는 제2 저항기(Rs)의 전기 저항 값보다 더 높은, 자동화된 장치(1, 15; 100; 200; 300). - 제1항 또는 제2항에 있어서, 센서 수단(C, P)을 통해 검출 가능한 적어도 하나의 조건을 나타내는 정보를 공급하도록 구성되는 광학-유형 신호전달 배열체(80, 81)를 추가로 포함하고, 광학-유형 신호전달 배열체(80, 81)는 광 신호를 생성하도록 제어 가능한 적어도 하나의 다중 색상 발광 장치(80)를 포함하며, 그 방출의 색상 및/또는 방식(modality)은 공급하고자 하는 정보의 유형에 의존하는, 자동화된 장치(1, 15; 100; 200; 300).
- 제3항에 있어서, 상기 적어도 하나의 다중 색상 발광 장치(80)는 RGB LED 스트립을 포함하는, 자동화된 장치(1, 15; 100; 200; 300).
- 제1항 내지 제4항 중 어느 한 항에 있어서, 커버링 모듈(21 내지 39; 110 내지 113; 210 및 211; 321 내지 328)의 적어도 일부의 하중-지탱 층(40)은 서로 인접한 적어도 2개의 상이한 커버링 모듈(23, 24, 28, 29)이 분리 가능한 방식으로 기계적 및/또는 전기적으로 함께 연결될 수 있도록 구성되는 연계된 커넥터 요소(45, 46)를 형성 또는 구비하고, 바람직하게는 제1 커버링 모듈(23)의 하중-지탱 층(40)은 인접한 제2 커버링 모듈(24)의 대응하는 표면 또는 벽(42, 43)을 대면하는 적어도 하나의 표면 또는 벽(42, 43)을 갖고, 각각의 커넥터 요소는 제1 커버링 모듈(23)의 표면 또는 벽에 연계되며 제2 커버링 모듈(24)의 표면 또는 벽에 연계되는, 자동화된 장치(1, 15; 100; 200; 300).
- 제1항 내지 제5항 중 어느 한 항에 있어서, 제1 하부 전기 전도성 층(61) 및 제2 상부 전기 전도성 층(63) 각각은 전기 전도성 직물을 포함하고, 제2 상부 전기 전도성 층(63)은 바람직하게는 제1 하부 전기 전도성 층(62)보다 더 탄성인, 자동화된 장치(1, 15; 100; 200; 300).
- 제1항 내지 제6항 중 어느 한 항에 있어서, 적어도 하나의 센서화된 커버링 모듈(23, 24, 28, 29)은 특히 전기 전도성 직물인 전기 전도성 재료의 적어도 하나의 각각의 층(65)을 포함하는 적어도 하나의 근접도 센서 장치(P)를 통합하는, 자동화된 장치(1, 15; 100; 200; 300).
- 제1항 내지 제7항 중 어느 한 항에 있어서, 제어 시스템(15, 50; 303)의 제어 유닛(15)과 신호 통신적으로 연결되고 각각의 센서 수단(C, P)을 통해 이루어지는 검출을 나타내는 신호 또는 데이터를 공급하도록 구성되는 복수의 상기 센서화된 커버링 모듈(23, 24, 28, 29)을 포함하고, 제어 유닛(15)은 상기 신호 또는 데이터를 공급하는 상기 복수의 센서화된 커버링 모듈(23, 24, 28, 29)을 식별하도록 구성되는, 자동화된 장치(1, 15; 100; 200; 300).
- 제1항 내지 제8항 중 어느 한 항에 있어서, 복수의 별개의 중첩된 층(40, 60 내지 67)은 이하:
- 탄성 압축 가능 재료로 제조되고 하중-지탱 층(40)의 외부 측면에 연계되는, 접촉 센서 장치(C) 아래에 설정되는 하부 완충 층(60);
- 탄성 압축 가능 재료로 제조되고, 접촉 센서 장치(C) 상부에 설정되는 상부 완충 층(64, 66);
- 전기 절연성 재료로 제조되고 각각의 커버링 모듈의 외부 표면의 적어도 일부를 형성하는 외부 코팅 층(67) 중 하나 이상을 포함하는, 자동화된 장치(1, 15; 100; 200; 300). - 제1항 내지 제9항 중 어느 한 항에 있어서, 하중-지탱 층(40) 위에서 연장되는 별개의 중첩된 층(60 내지 67)은 가요성이고 그리고/또는 대응하는 커버링 모듈(23, 24, 28, 29)의 외부 면 또는 그 주된 부분의 영역에 실질적으로 대응하는 표면적을 갖는, 자동화된 장치(1, 15; 100; 200; 300).
- 제1항 내지 제10항 중 어느 한 항에 있어서, 하중-지탱 층(40)은 그 내부 측면과 가동형 구조체(4 내지 8; 103; 203; 301)의 하부 부분 사이에, 특히 구성요소(50, 51, 52, 70, 80)를 수용하기 위한 그리고/또는 통기 통로를 형성하기 위한 자유 간극을 형성하도록 성형되는, 자동화된 장치(1, 15; 100; 200; 300).
- 제1항 내지 제11항 중 어느 한 항에 있어서, 각각의 센서화된 모듈(28, 29)의 센서 수단(C, P) 또는 복수의 센서화된 모듈(23, 24)의 센서 수단(C, P)이 연결되는 적어도 하나의 전자 제어 보드(50)를 포함하고, 상기 적어도 하나의 전자 제어 보드(50)는 자동화된 장치(1, 15; 100; 200; 300)의 제어 시스템(15, 50; 303)의 제어 유닛(15)과 신호 통신적으로 연결되도록 구성되는, 자동화된 장치(1, 15; 100; 200; 300).
- 자동화된 장치(1, 15; 100; 200; 300)의 구조체(4 내지 8; 103; 203; 301)의 적어도 일부를 커버하도록 구성되는 센서화된 커버링(20; 120; 220; 320)이며, 센서화된 커버링(20; 120; 220; 320)은 탄성 압축 가능 재료의 적어도 하나의 층(60, 64, 66)이 연계되는 각각의 미리 정의된 형상의 하중-지탱 구조체(40)를 각각 갖는 복수의 커버링 모듈(21 내지 39; 110 내지 113; 210 및 211; 321 내지 328)을 포함하고, 센서화된 커버링(20; 120; 220; 320)은 하나 이상의 센서 요소(C, P)를 포함하며, 이하:
- 제1 전기 전도성 층(61) 및 제2 전기 전도성 층(63)을 포함하는 접촉 센서 장치(C)로서, 탄성 압축 가능 재료로 제조되는 중간 전기 절연성 층(62)이 그 사이에 설정되며, 중간 전기 절연성 층(62)은 복수의 관통 개구(62a)를 갖고, 복수의 관통 개구(62a)는 제1 전기 전도성 층(61) 및 제2 전기 전도성 층(63)이 상기 관통 개구(62a)에서 서로 국부적으로 대면하는 방식으로 배열되는, 접촉 센서 장치(C); 및
- 하나 이상의 센서 요소(C, P)에 의해 검출될 수 있는 센서화된 커버링(20; 120; 220; 320)의 적어도 하나의 동작 상태에 관한 정보를 공급하도록 구성되는 광학-유형 신호전달 배열체(80, 81)로서, 광학-유형 신호전달 배열체(80, 81)는 광 신호를 생성하도록 제어될 수 있는 적어도 하나의 다중 색상 발광 장치(80)를 포함하고, 그 방출의 색상 및/또는 방식은 공급하고자 하는 정보의 유형에 의존하는, 광학-유형 신호전달 배열체(80, 81) 중 적어도 하나를 포함하는, 센서화된 커버링(20; 120; 220; 320) - 제13항에 따른 센서화된 커버링(20; 120; 220; 320)을 포함하는, 특히 로봇인 자동화된 장치.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| IT102017000121883A IT201700121883A1 (it) | 2017-10-26 | 2017-10-26 | "Dispositivo automatizzato con una struttura mobile, in particolare un robot" |
| IT102017000121883 | 2017-10-26 | ||
| PCT/IB2018/057993 WO2019082019A1 (en) | 2017-10-26 | 2018-10-16 | AUTOMATED DEVICE WITH A SENSORY COVERED MOBILE STRUCTURE, ESPECIALLY A ROBOT |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200074099A true KR20200074099A (ko) | 2020-06-24 |
| KR102474080B1 KR102474080B1 (ko) | 2022-12-05 |
Family
ID=61224443
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020207009701A Active KR102474080B1 (ko) | 2017-10-26 | 2018-10-16 | 가동형 구조체을 갖는 자동화된 장치, 특히 로봇 |
Country Status (14)
| Country | Link |
|---|---|
| US (1) | US11440191B2 (ko) |
| EP (1) | EP3700719B1 (ko) |
| JP (1) | JP7298811B2 (ko) |
| KR (1) | KR102474080B1 (ko) |
| CN (1) | CN111246980B (ko) |
| BR (1) | BR112020003453B1 (ko) |
| CA (1) | CA3072148A1 (ko) |
| ES (1) | ES2962318T3 (ko) |
| IT (1) | IT201700121883A1 (ko) |
| MX (1) | MX2020004293A (ko) |
| PL (1) | PL3700719T3 (ko) |
| RS (1) | RS65121B1 (ko) |
| RU (1) | RU2763460C2 (ko) |
| WO (1) | WO2019082019A1 (ko) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20220091276A (ko) * | 2020-12-23 | 2022-06-30 | (주)아스토 | 로봇 충돌 감지 시스템 및 방법 |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11648672B2 (en) | 2018-01-16 | 2023-05-16 | Sony Interactive Entertainment Inc. | Information processing device and image generation method |
| WO2019142229A1 (ja) * | 2018-01-16 | 2019-07-25 | 株式会社ソニー・インタラクティブエンタテインメント | ロボット装置、ロボット装置の制御方法およびプログラム |
| US11733705B2 (en) | 2018-01-16 | 2023-08-22 | Sony Interactive Entertainment Inc. | Moving body and moving body control method |
| KR102791357B1 (ko) * | 2019-10-11 | 2025-04-09 | 한국기계연구원 | 로봇의 외력 센싱 구조 |
| JP7497221B2 (ja) * | 2020-06-09 | 2024-06-10 | パラマウントベッド株式会社 | マットレス、センサシステム |
| DE102021200795A1 (de) * | 2021-01-28 | 2022-07-28 | Dr. Doll Engineering Gmbh | Schutzvorrichtung für einen Industrieroboter |
| CN112936346A (zh) * | 2021-02-08 | 2021-06-11 | 中科新松有限公司 | 一种机械臂末端io板 |
| JP7657621B2 (ja) * | 2021-03-11 | 2025-04-07 | 川崎重工業株式会社 | ロボットシステムおよびロボットシステムの組み立て方法 |
| JP7540384B2 (ja) * | 2021-04-05 | 2024-08-27 | トヨタ自動車株式会社 | 協働ロボットシステム及びその組み立てセット |
| WO2023283146A1 (en) * | 2021-07-05 | 2023-01-12 | Mantis Robotics, Inc. | Safety system for hand-guiding a robot |
| US12447606B2 (en) | 2021-07-05 | 2025-10-21 | Mantis Robotics, Inc. | Safety system for hand-guiding a robot |
| DE102022204453A1 (de) | 2022-05-05 | 2023-11-09 | Dr. Doll Engineering Gmbh | Schutzvorrichtung für einen Endeffektor eines Roboterarms eines Industrieroboters und Industrieroboter |
| DE102023115331A1 (de) * | 2023-06-13 | 2024-12-19 | Iav Gmbh Ingenieurgesellschaft Auto Und Verkehr | Manipulator mit Steuermodulanordnung für eine Erntemaschine |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007015050A (ja) * | 2005-07-07 | 2007-01-25 | Kawada Kogyo Kk | 精密機器の外装構造および移動ロボット |
| JP2007102719A (ja) * | 2005-10-07 | 2007-04-19 | Toyota Motor Corp | 接触点検出装置およびこれを用いたロボット |
| JP2008149442A (ja) * | 2006-12-14 | 2008-07-03 | Ind Technol Res Inst | 表面に情報表示および相互作用機能を備える可動装置 |
| JP2014100752A (ja) * | 2012-11-19 | 2014-06-05 | Yaskawa Electric Corp | ロボット |
| JP2014138966A (ja) * | 2013-01-21 | 2014-07-31 | Yaskawa Electric Corp | ロボット装置 |
| JP2017140660A (ja) * | 2016-02-08 | 2017-08-17 | 川崎重工業株式会社 | 作業ロボット |
Family Cites Families (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5855888U (ja) * | 1981-10-12 | 1983-04-15 | オムロン株式会社 | ロボツト |
| JPS63238502A (ja) | 1987-03-27 | 1988-10-04 | Yokohama Rubber Co Ltd:The | 近接覚・触覚センサ |
| BE1004639A5 (fr) * | 1990-09-27 | 1993-01-05 | Dumont Gilbert | Tampon de protection contre les dangers de collisions en robotique. |
| JP2001239479A (ja) * | 1999-12-24 | 2001-09-04 | Sony Corp | 脚式移動ロボット及びロボットのための外装モジュール |
| DE10162412A1 (de) | 2001-12-19 | 2003-07-10 | Kuka Roboter Gmbh | Einrichtung und Verfahren zum Sichern von Vorrichtungen mit frei im Raum beweglichen Teilen |
| SE529377C2 (sv) * | 2005-10-18 | 2007-07-24 | Morphic Technologies Ab Publ | Metod och arrangemang för att lokalisera och plocka upp föremål från en bärare |
| RU2361726C2 (ru) * | 2007-02-28 | 2009-07-20 | Общество С Ограниченной Ответственностью "Алгоритм-Робо" | Система управления антропоморфным роботом и способ управления |
| ITPI20070085A1 (it) * | 2007-07-23 | 2009-01-24 | Scuola Superiore Di Studi Univ | Sensore tattile flessibile e metodo per ottenerlo |
| US8490501B2 (en) * | 2008-05-29 | 2013-07-23 | Harmonic Drive Systems Inc. | Complex sensor and robot hand |
| JP5162799B2 (ja) | 2008-05-30 | 2013-03-13 | 株式会社フジクラ | 接近制御装置および接近センサ |
| FR2942658B1 (fr) | 2009-02-27 | 2011-12-09 | Commissariat Energie Atomique | Peau protectrice pour robots |
| JP2012218139A (ja) * | 2011-04-14 | 2012-11-12 | Seiko Epson Corp | モーターユニット、およびロボット |
| JP6044036B2 (ja) * | 2012-06-26 | 2016-12-14 | フォンダツィオーネ・イスティトゥート・イタリアーノ・ディ・テクノロジャFondazione Istituto Italiano Di Tecnologia | テキスタイルサポータ内に一体化された電気的または電子的な装置のための触覚コントロール装置 |
| JP5660401B2 (ja) | 2012-11-19 | 2015-01-28 | 株式会社安川電機 | ロボット装置 |
| JP2016068200A (ja) | 2014-09-30 | 2016-05-09 | セイコーエプソン株式会社 | ロボット |
| ITUB20153909A1 (it) * | 2015-09-25 | 2017-03-25 | Scuola Superiore Di Studi Univ E Di Perfezionamento Santanna | Rivestimento sensorizzato per l'interazione robotica |
| EP3147752B1 (en) * | 2015-09-25 | 2018-12-26 | Technische Universität München | An arrangement for providing a user interface |
| ITUA20163520A1 (it) | 2016-05-17 | 2017-11-17 | Comau Spa | "Dispositivo automatizzato con una struttura mobile, particolarmente un robot" |
| ITUA20163522A1 (it) | 2016-05-17 | 2017-11-17 | Comau Spa | "Copertura sensorizzata per un dispositivo industriale" |
| USD834082S1 (en) | 2016-05-18 | 2018-11-20 | Comau S.P.A. | Robot |
| JP2018155713A (ja) * | 2017-03-21 | 2018-10-04 | 住友理工株式会社 | センサ装置 |
| JP2018155712A (ja) * | 2017-03-21 | 2018-10-04 | 住友理工株式会社 | センサ装置 |
| FR3066131B1 (fr) * | 2017-05-15 | 2019-06-14 | Fogale Nanotech | Robot dote d'une detection capacitive |
| USD850506S1 (en) | 2017-08-21 | 2019-06-04 | Comau S.P.A. | Industrial robot |
| US10668627B2 (en) * | 2017-09-26 | 2020-06-02 | Toyota Research Institute, Inc. | Deformable sensors and methods for detecting pose and force against an object |
-
2017
- 2017-10-26 IT IT102017000121883A patent/IT201700121883A1/it unknown
-
2018
- 2018-10-16 MX MX2020004293A patent/MX2020004293A/es unknown
- 2018-10-16 CN CN201880069680.9A patent/CN111246980B/zh active Active
- 2018-10-16 EP EP18793480.7A patent/EP3700719B1/en active Active
- 2018-10-16 CA CA3072148A patent/CA3072148A1/en active Pending
- 2018-10-16 PL PL18793480.7T patent/PL3700719T3/pl unknown
- 2018-10-16 BR BR112020003453-3A patent/BR112020003453B1/pt active IP Right Grant
- 2018-10-16 RU RU2020110447A patent/RU2763460C2/ru active
- 2018-10-16 RS RS20240120A patent/RS65121B1/sr unknown
- 2018-10-16 ES ES18793480T patent/ES2962318T3/es active Active
- 2018-10-16 WO PCT/IB2018/057993 patent/WO2019082019A1/en not_active Ceased
- 2018-10-16 JP JP2020506970A patent/JP7298811B2/ja active Active
- 2018-10-16 US US16/757,545 patent/US11440191B2/en active Active
- 2018-10-16 KR KR1020207009701A patent/KR102474080B1/ko active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007015050A (ja) * | 2005-07-07 | 2007-01-25 | Kawada Kogyo Kk | 精密機器の外装構造および移動ロボット |
| JP2007102719A (ja) * | 2005-10-07 | 2007-04-19 | Toyota Motor Corp | 接触点検出装置およびこれを用いたロボット |
| JP2008149442A (ja) * | 2006-12-14 | 2008-07-03 | Ind Technol Res Inst | 表面に情報表示および相互作用機能を備える可動装置 |
| JP2014100752A (ja) * | 2012-11-19 | 2014-06-05 | Yaskawa Electric Corp | ロボット |
| JP2014138966A (ja) * | 2013-01-21 | 2014-07-31 | Yaskawa Electric Corp | ロボット装置 |
| JP2017140660A (ja) * | 2016-02-08 | 2017-08-17 | 川崎重工業株式会社 | 作業ロボット |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20220091276A (ko) * | 2020-12-23 | 2022-06-30 | (주)아스토 | 로봇 충돌 감지 시스템 및 방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| CA3072148A1 (en) | 2019-05-02 |
| US11440191B2 (en) | 2022-09-13 |
| CN111246980A (zh) | 2020-06-05 |
| IT201700121883A1 (it) | 2019-04-26 |
| WO2019082019A1 (en) | 2019-05-02 |
| KR102474080B1 (ko) | 2022-12-05 |
| RU2020110447A (ru) | 2021-11-26 |
| MX2020004293A (es) | 2020-07-29 |
| EP3700719A1 (en) | 2020-09-02 |
| JP2021500239A (ja) | 2021-01-07 |
| US20210197381A1 (en) | 2021-07-01 |
| CN111246980B (zh) | 2024-03-29 |
| ES2962318T3 (es) | 2024-03-18 |
| BR112020003453A2 (pt) | 2020-08-25 |
| RS65121B1 (sr) | 2024-02-29 |
| BR112020003453B1 (pt) | 2024-02-20 |
| JP7298811B2 (ja) | 2023-06-27 |
| PL3700719T3 (pl) | 2024-02-26 |
| RU2020110447A3 (ko) | 2021-11-26 |
| EP3700719B1 (en) | 2023-11-08 |
| RU2763460C2 (ru) | 2021-12-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20200074099A (ko) | 가동형 구조체을 갖는 자동화된 장치, 특히 로봇 | |
| US10245729B2 (en) | Sensorized covering for an industrial device | |
| EP3246136B1 (en) | Automated device with a movable structure, in particular a robot | |
| KR102468856B1 (ko) | 적층형 모듈로봇 | |
| JP2016538150A (ja) | 入力モジュールを備えたロボットアーム | |
| KR102148251B1 (ko) | 탈부착식 로봇 교시장치 | |
| CN112088071A (zh) | 机器人组件 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0105 | International application |
St.27 status event code: A-0-1-A10-A15-nap-PA0105 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| A201 | Request for examination | ||
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| D13-X000 | Search requested |
St.27 status event code: A-1-2-D10-D13-srh-X000 |
|
| D14-X000 | Search report completed |
St.27 status event code: A-1-2-D10-D14-srh-X000 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| E13-X000 | Pre-grant limitation requested |
St.27 status event code: A-2-3-E10-E13-lim-X000 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U12-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 4 |
|
| U11 | Full renewal or maintenance fee paid |
Free format text: ST27 STATUS EVENT CODE: A-4-4-U10-U11-OTH-PR1001 (AS PROVIDED BY THE NATIONAL OFFICE) Year of fee payment: 4 |