JP2017149273A - 車載装置、車両用システム、及びプログラム - Google Patents
車載装置、車両用システム、及びプログラム Download PDFInfo
- Publication number
- JP2017149273A JP2017149273A JP2016033517A JP2016033517A JP2017149273A JP 2017149273 A JP2017149273 A JP 2017149273A JP 2016033517 A JP2016033517 A JP 2016033517A JP 2016033517 A JP2016033517 A JP 2016033517A JP 2017149273 A JP2017149273 A JP 2017149273A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- wearable device
- driver
- arm
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images









Landscapes
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Measuring Pulse, Heart Rate, Blood Pressure Or Blood Flow (AREA)
- Measurement Of The Respiration, Hearing Ability, Form, And Blood Characteristics Of Living Organisms (AREA)
Abstract
【課題】ドライバが装着しているウェアラブルデバイスをより容易に特定することを可能にする。【解決手段】車両で用いられ、車両の横Gを取得する車両信号取得部402と、ユーザの腕に装着されて、ユーザの腕に生じる腕Gを計測するウェアラブルデバイスと通信を行う通信部401と、車両信号取得部402で取得した車両の横Gと、ウェアラブルデバイスから通信部401で受信したユーザの腕Gとを比較して、ウェアラブルデバイスをドライバが装着しているか否か判定する装着判定部403とを備える。【選択図】図4
Description
本発明は、ユーザの生体情報を計測するウェアラブルデバイスと無線通信を行う車載装置、この車載装置を含む車両用システム、この車載装置を動作させるプログラムに関するものである。
従来、ユーザの生体情報を用いてユーザを特定する技術が知られている。例えば、特許文献1には、ユーザごとの生体情報を含むプロファイルデータをウェアラブルデバイスの記憶部に保持しておき、ユーザの身体からウェアラブルデバイスで取得する生体情報と、記憶部に保持されたプロファイルデータとを比較して生体認証を行うことでユーザを特定する技術が開示されている。
特許文献1に開示の技術では、ウェアラブルデバイスを装着しているユーザを特定することはできるものの、そのユーザが車両を運転しているドライバであることを特定することはできない。よって、ドライバが装着しているウェアラブルデバイスを特定することが困難であった。
本発明は、上記従来の問題点に鑑みなされたものであって、その目的は、ドライバが装着しているウェアラブルデバイスをより容易に特定することを可能にする車載装置、車両用システム、及びプログラムを提供することにある。
上記目的は独立請求項に記載の特徴の組み合わせにより達成され、また、下位請求項は、発明の更なる有利な具体例を規定する。特許請求の範囲に記載した括弧内の符号は、一つの態様として後述する実施形態に記載の具体的手段との対応関係を示すものであって、本発明の技術的範囲を限定するものではない。
上記目的を達成するために、本発明の車載装置は、車両で用いられるとともに、車両のドライバが操作する操作部材の操作に応じて変動する車両信号を取得する車両信号取得部(402)を備える車載装置であって、ユーザの腕のいずれかの部位である腕部に装着されて、腕部に生じる加速度を含むユーザの生体情報を計測するウェアラブルデバイス(2)と、無線通信によって情報のやり取りを行う通信部(401)と、車両信号取得部で取得した車両信号と、ウェアラブルデバイスから通信部で受信した腕部に生じる加速度とを比較して、ウェアラブルデバイスをドライバが装着しているか否か判定する装着判定部(403)とを備える。
上記目的を達成するために、本発明の車両用システムは、前述の車載装置(40)と、ユーザの指、手、及び腕のいずれかである腕部に装着されて、腕部に生じる加速度を含むユーザの生体情報を計測するウェアラブルデバイス(2)とを含む。
上記目的を達成するために、本発明のプログラムは、車両のドライバが操作する操作部材の操作に応じて変動する車両信号を取得する車両信号取得機能(402)と、ユーザの腕のいずれかの部位である腕部に装着されて、腕部に生じる加速度を含むユーザの生体情報を計測するウェアラブルデバイス(2)と、無線通信によって情報のやり取りを行う通信機能(401)と、ウェアラブルデバイスから通信機能によって受信した腕部に生じる加速度と、車両信号取得機能によって取得した車両信号とを比較して、ウェアラブルデバイスをドライバが装着しているか否か判定する装着判定機能(403)とをコンピュータに実行させる。
これらによれば、車両信号は、車両のドライバが操作する操作部材の操作に応じて変動する。操作部材の操作に応じて、ユーザの腕のいずれかの部位である腕部も移動するため、この腕部に生じる加速度も、操作部材の操作に応じて変動する。ウェアラブルデバイスを腕部に装着しているユーザがドライバであれば、この車両信号と腕部に生じる加速度との間には相関が生じる。よって、ウェアラブルデバイスから通信機能によって受信した腕部に生じる加速度と、車両信号取得機能によって取得した車両信号とを比較することで、ウェアラブルデバイスをドライバが装着しているか否かを判定できる。その結果、ドライバが装着しているウェアラブルデバイスをより容易に特定することが可能になる。
図面を参照しながら、開示のための複数の実施形態及び変形例を説明する。なお、説明の便宜上、複数の実施形態及び変形例の間において、それまでの説明に用いた図に示した部分と同一の機能を有する部分については、同一の符号を付し、その説明を省略する場合がある。同一の符号を付した部分については、他の実施形態及び/又は変形例における説明を参照することができる。
(実施形態1)
<ドライバ状態判定システム1の概略構成>
以下、本発明の実施形態1について説明する。図1に示すように、ドライバ状態判定システム1は、ウェアラブルデバイス2及び車両側ユニット3を含んでいる。このドライバ状態判定システム1が請求項の車両用システムに相当する。
<ドライバ状態判定システム1の概略構成>
以下、本発明の実施形態1について説明する。図1に示すように、ドライバ状態判定システム1は、ウェアラブルデバイス2及び車両側ユニット3を含んでいる。このドライバ状態判定システム1が請求項の車両用システムに相当する。
ウェアラブルデバイス2は、ユーザの手首に装着されて、そのユーザの生体信号を計測する腕時計型のウェアラブルデバイスである。ウェアラブルデバイス2としては、ユーザの指、手、手首、前腕といった腕のいずれかの部位に装着するものであればよく、例えばユーザの指に装着する指輪型、ユーザの手に装着するグローブ型等であってもよいが、以下では腕時計型を例に挙げて説明を行う。
車両側ユニット3は、ウェアラブルデバイス2と無線通信を行う。また、車両側ユニット3は、車両HVのドライバの状態(以下、ドライバ状態)を判定したり、ドライバ状態を提示したりする。
<ウェアラブルデバイス2の概略構成>
ウェアラブルデバイス2は、図2に示すように、主制御部20、計測関連部21、操作入力部22、通信部23、及び提示部24を備えている。
ウェアラブルデバイス2は、図2に示すように、主制御部20、計測関連部21、操作入力部22、通信部23、及び提示部24を備えている。
計測関連部21は、図2に示すように、加速度センサ211、体動判定部212、脈波センサ213、心拍計測部214、及び血圧計測部215を備えている。
加速度センサ211は、起動された場合に、ウェアラブルデバイス2に生じる加速度を電圧値として逐次計測するセンサである。つまり、加速度センサ211は、ユーザの生体情報(以下、生体信号)として、ウェアラブルデバイス2を装着したユーザの腕に生じる加速度を計測する。例えば、加速度センサ211は、ウェアラブルデバイス2の電源がオンになったときに主制御部20の指示に従って起動する構成とすればよい。加速度センサ211としては、互いに直交する3軸それぞれの軸方向に沿った加速度を計測可能な3軸加速度センサを用いればよい。なお、加速度センサ211としては、1軸加速度センサ、2軸加速度センサを用いる構成としてもよい。加速度センサ211は、計測した加速度を体動判定部212及び主制御部20に出力する。計測した加速度は、体動判定部212を介して主制御部20に出力する構成としてもよい。
体動判定部212は、加速度センサ211で計測した加速度をもとに、ユーザの体動の有無を判定する。一例として、3軸の加速度のいずれかでも閾値以上となった場合に、ユーザの体動ありと判定し、3軸の加速度のいずれも閾値未満となった場合に、ユーザの体動なしと判定する。ここで言うところの閾値とは、例えばユーザの体動なしの場合のノイズを体動ありと判定しない程度に設定された任意の値とすればよい。なお、3軸それぞれの閾値が異なる構成であってもよい。
脈波センサ213は、起動された場合に、ユーザの脈波を検出する。例えば、脈波センサ213は、体動判定部212で体動なしと判定している場合に作動する構成とすればよい。脈波センサ213は、計測周期(言い換えるとサンプリングレート)を変更可能な脈波センサであって、サンプリングレートを例えば20Hzの低周期と200Hzの高周期とに切り替えることができるものとする。このような脈波センサ213としては、例えば光電式脈波センサ、インピーダンス式脈波センサ等を用いることができる。
心拍計測部214は、脈波センサ213で逐次検出される容積脈波の信号に周知の信号処理を行い、容積脈波からユーザの心拍数を計測する。計測した心拍数は主制御部20へ出力する。血圧計測部215は、脈波センサ213で逐次検出される容積脈波の信号に周知の信号処理を行い、容積脈波からユーザの血圧を計測する。計測した血圧は主制御部20へ出力する。
容積脈波の信号をもとに血圧を計測するには、心拍数の計測に必要なサンプリングレートよりもサンプリングレートを大きくして、容積脈波の波形を詳細に計測することが必要になる。よって、脈波センサ213で検出される容積脈波を用いて血圧を計測する場合には、心拍数と血圧とのうちの心拍数のみを計測する場合よりもサンプリングレートを大きくする構成とすればよい。本実施形態の例では、心拍数と血圧とのうちの心拍数のみの計測はサンプリングレート20Hzで行い、血圧の計測はサンプリングレート200Hzで行う構成とすればよい。
操作入力部22は、ユーザが操作するスイッチ群である。操作入力部22はメカニカルなスイッチであってもよいし、タッチパネル式のスイッチであってもよい。一例として、ウェアラブルデバイス2の電源をオン状態とオフ状態との間で切り替える電源スイッチ、生体信号の計測開始を指示する計測開始スイッチ、計測結果の提示を指示する提示開始スイッチ等を有している。計測開始スイッチ及び提示開始スイッチは、複数の生体信号の個々を対象として指定できる構成としてもよい。
なお、ウェアラブルデバイス2の電源のオンオフは、操作入力部22へのユーザからの操作入力によって切り換えない構成としてもよい。例えば、ウェアラブルデバイス2の着脱に応じて自動的に切り換わる構成としてもよい。
通信部23は、車両側ユニット3の後述する近距離通信機5との間で近距離無線通信を行う。通信部23は、Bluetooth(登録商標)、ZigBee(登録商標)等の近距離無線通信規格に沿って信号を送受信する構成とすればよいが、以下ではBluetoothの規格に沿って信号を送受信する場合を例に挙げて説明を行う。なお、消費電力低減の観点からは、Bluetooth Low Energyの規格に沿って信号を送受信する構成とすることがより好ましい。
提示部24は、主制御部20の指示に従って情報提示を行う。情報提示は、表示装置によって行ってもよいし、音声出力装置によって行ってもよい。一例として、計測関連部21で計測されるユーザの心拍数、血圧といった生体信号の計測値を表示すればよい。
主制御部20は、揮発性メモリ、不揮発性メモリ、I/O、及びこれらを接続するバスを備え、不揮発性メモリに記憶された制御プログラムを実行することで各種の処理を実行する。例えば、ウェアラブルデバイス2の電源がオンになったときに、加速度センサ211を起動させる。また、操作入力部22のうちの計測開始スイッチが操作された場合に、脈波センサ213を起動させる。他にも、操作入力部22のうちの提示開始スイッチが操作された場合に、計測関連部21で計測した生体信号の計測値を提示部24に提示させる。また、計測関連部21で計測したユーザの腕に生じる加速度、推定心拍数、推定血圧といった生体信号を通信部23から車両側ユニット3へ送信させる。
また、主制御部20は、脈波センサ213及び/又は加速度センサ211の出力に基づき、心拍推定、血圧推定、眠気度合い推定、漫然度合い推定等を行う構成としてもよい。心拍推定、血圧推定を主制御部20で行う構成とする場合、つまり、心拍計測部214及び血圧計測部215の機能を主制御部20が担う場合には、心拍計測部214及び血圧計測部215を計測関連部21に備えない構成とすればよい。なお、主制御部20が実行する機能の一部又は全部を、一つ或いは複数のIC等によりハードウェア的に構成してもよい。
<車両側ユニット3の概略構成>
車両側ユニット3は、車両HVに搭載され、図3に示すように、HMI(Human Machine Interface)システム4、近距離通信機5、車両制御ECU6、加速度センサ7、及びボデーECU8を含んでいる。HMIシステム4、近距離通信機5、車両制御ECU6、及びボデーECU8は、例えば車内LANに接続されており、通信によって互いに情報をやり取りすることができる。
車両側ユニット3は、車両HVに搭載され、図3に示すように、HMI(Human Machine Interface)システム4、近距離通信機5、車両制御ECU6、加速度センサ7、及びボデーECU8を含んでいる。HMIシステム4、近距離通信機5、車両制御ECU6、及びボデーECU8は、例えば車内LANに接続されており、通信によって互いに情報をやり取りすることができる。
近距離通信機5は、近距離無線通信規格に沿って信号を送受信する。近距離通信機5は、通信範囲が車両HVの車室内に止まることが好ましく、例えば最大通信距離が1m未満程度となるようにすればよい。近距離通信機5は、通信範囲内に存在するウェアラブルデバイス2との間で無線通信を行う。本実施形態の例では、近距離通信機5は、Bluetooth Low Energyの規格に沿って信号を送受信する。以下では、ユーザが装着するウェアラブルデバイス2と近距離通信機5とのペアリングが実行済みであるものとして以降の説明を行う。
車両制御ECU6は、車両HVの加減速制御及び/又は操舵制御を行う電子制御装置である。車両制御ECU6としては、操舵制御を行う操舵ECU、加減速制御を行うパワーユニット制御ECU及びブレーキECU等がある。車両制御ECU6は、車両HVに搭載されたアクセルポジションセンサ、ブレーキ踏力センサ、舵角センサ、車速センサ、加速度センサ7、ジャイロセンサ等の各センサから出力される検出信号を取得し、電子制御スロットル、ブレーキアクチュエータ、EPS(Electric Power Steering)モータ等の各走行制御デバイスへ制御信号を出力する。また、車両制御ECU6は、上述の各センサの検出信号(以下、車両信号)を車内LANへ出力可能である。
また、車両制御ECU6は、車両HVの周辺を監視する周辺監視センサで検出した監視情報をもとに、車両HVの加速、制動、及び/又は操舵を自動で制御することで、ドライバによる運転操作の代行を行う自動運転機能を備えている。自動運転機能の一例としては、先行車の監視情報をもとに駆動力及び制動力を調整することで、先行車との目標車間距離を維持するように車両HVの走行速度を制御するACC(Adaptive Cruise Control)機能等がある。
加速度センサ7は、車両HVの左右方向に発生する横加速度(つまり、横G)を検出する加速度センサであり、検出した横Gを車両制御ECU6に逐次出力する。横Gは、車両HVのドライバがステアリングホイールを操作するのに応じて変動することから、この横Gが請求項の車両信号、ステアリングホイールが請求項の操作部材に相当する。なお、加速度センサ7は、自車の前後方向に発生する加速度(つまり、前後G)も検出して車両制御ECU6に逐次出力する構成としてもよい。
ボデーECU8は、ヘッドライト、ハザードランプ、ウィンカーランプ、ルームランプ等の照明、ドアの施解錠、パワーウィンドウ等を制御する電子制御装置である。ボデーECU8は、エンジンスタートボタン、シフトポジションセンサ、ライトスイッチ、ウィンカースイッチ、ルームランプスイッチ、パワーウィンドウスイッチ等から入力された各種情報に基づき、ROMに記憶された各種の制御プログラムを実行することで、各種の処理を行う。
エンジンスタートボタンは、車両HVのエンジンを始動するためのボタンスイッチであり、このエンジンスタートボタンのオンオフに応じた信号を出力する。このエンジンスタートボタンが請求項の操作部材に相当し、このエンジンスタートボタンのオンオフに応じた信号が請求項の車両信号に相当する。シフトポジションセンサは、車両HVのシフトレバーの操作に応じたシフトポジションを検出するセンサであって、検出したポジションを示す信号を出力する。シフトポジションは、ドライビングレンジ若しくはギアポジションと呼ばれることもある。このシフトレバーが請求項の操作部材に相当し、シフトポジションセンサの信号が請求項の車両信号に相当する。
ライトスイッチは、例えば車両HVの例えばステアリングコラムに設けられ、ヘッドライト等の車外灯のオンオフを切り替えるスイッチであり、オンオフに応じた信号を出力する。このライトスイッチが請求項の操作部材に相当し、ライトスイッチの信号が請求項の車両信号に相当する。ウィンカースイッチは、ウィンカーレバーに対する左右それぞれのウィンカーランプ点灯操作を検出するためのスイッチであって、ウィンカーレバーの操作に応じた右左折時のウィンカー信号を出力する。以下では、右折時のウィンカー信号を右ウィンカー信号、左折時のウィンカー信号を左ウィンカー信号と呼ぶ。このウィンカーレバーが請求項の操作部材に相当し、ウィンカー信号が請求項の車両信号に相当する。
ルームランプスイッチは、ルームランプスイッチのオンオフに応じた信号を出力する。このルームランプスイッチが請求項の操作部材に相当し、ルームランプスイッチのオンオフに応じた信号が請求項の車両信号に相当する。パワーウィンドウスイッチは、車両HVのウィンドウの開閉を行うためのスイッチであって、開閉操作に応じた信号を出力する。このパワーウィンドウスイッチが請求項の操作部材に相当し、開閉操作に応じた信号が請求項の車両信号に相当する。
HMIシステム4は、自車のドライバからの入力操作を受け付けたり、自車のドライバに向けて情報を提示したり、自車のドライバの状態を監視したりする。HMIシステム4については、以下で詳述する。
<HMIシステム4の概略構成>
図3に示すように、HMIシステム4は、HCU(Human Machine Interface Control Unit)40、操作デバイス41、表示装置42、及び音声出力装置43を備えている。
図3に示すように、HMIシステム4は、HCU(Human Machine Interface Control Unit)40、操作デバイス41、表示装置42、及び音声出力装置43を備えている。
操作デバイス41は、車両HVのドライバが操作するスイッチ群である。操作デバイス41は、各種の設定を行うために用いられる。例えば、操作デバイス41としては、車両HVのステアリングのスポーク部に設けられたステアリングスイッチ、表示装置42と一体となったタッチスイッチ、センタクラスタに設けられたエアコンのオンオフを切り替えるエアコンスイッチ等がある。
ステアリングスイッチの一例としては、前述したACC機能のオンオフを切り替えるためのクルーズコントロールスイッチ等がある。なお、クルーズコントロールスイッチは、ステアリングコラム等のステアリングのスポーク部以外に設けられる構成としてもよい。このクルーズコントロールスイッチが請求項の操作部材に相当し、クルーズコントロールスイッチのオンオフに応じた信号が請求項の車両信号に相当する。タッチスイッチの一例としては、カーオーディオの選曲ボタン等がある。なお、カーオーディオの選曲ボタンは、センタクラスタに設けられたメカニカルスイッチであってもよい。この選曲ボタンも請求項の操作部材に相当し、選曲ボタンの操作に応じた信号が請求項の車両信号に相当する。また、エアコンスイッチも請求項の操作部材に相当し、エアコンスイッチのオンオフに応じた信号が請求項の車両信号に相当する。
表示装置42としては、例えばコンビネーションメータ、CID(Center Information Display)、HUD(Head-Up Display)等がある。コンビネーションメータは、車両HVの運転席前方に配置される。CIDは、車両HVの車室内にてセンタクラスタの上方に配置される。コンビネーションメータ及びCIDは、HCU40から取得した画像データに基づいて、情報提示のための種々の画像をディスプレイの表示画面に表示する。HUDは、HCU40から取得した画像データに基づく画像の光を、車両HVのウインドシールドに規定された投影領域に投影する。ウインドシールドによって車室内側に反射された画像の光は、運転席に着座するドライバによって知覚される。ドライバは、HUDによって投影された画像の虚像を、車両HVの前方の外界風景と重ねて視認可能となる。
音声出力装置43としては、例えばオーディオスピーカ等がある。オーディオスピーカは、車両HVのドアの内張り内に配置される。オーディオスピーカは、再生する音声によって乗員への情報提示を行う。
HCU40は、CPU、ROM及びRAM等のメモリ、I/O、これらを接続するバスを備え、メモリに記憶された制御プログラムを実行することで各種の処理を実行する。例えば、近距離通信機5を介して通信を行っているウェアラブルデバイス2をドライバが装着しているか否か判定したり、ウェアラブルデバイス2から近距離通信機5で受信した生体信号をもとにドライバ状態を判定したりする。ドライバ状態としては、運転不適切状態、覚醒状態等がある。このHCU40が請求項の車載装置に相当する。
また、HCU40は、ウェアラブルデバイス2をドライバが装着していないと判定した場合に、表示装置42及び/又は音声出力装置43から警告を出力させる。この表示装置42及び音声出力装置43が請求項の情報提示装置に相当する。他にも、判定したドライバ状態に応じて、表示装置42及び/又は音声出力装置43から情報提示を行わせたりする。なお、HCU40が実行する機能の一部または全部を、一つあるいは複数のIC等によりハードウェア的に構成してもよい。
<HCU40の概略構成>
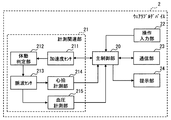
図4に示すように、HCU40は、通信部401、車両信号取得部402、装着判定部403、ドライバ状態判定部404、提示制御部405、及び切替制御部406を備えている。
図4に示すように、HCU40は、通信部401、車両信号取得部402、装着判定部403、ドライバ状態判定部404、提示制御部405、及び切替制御部406を備えている。
通信部401は、近距離通信機5とウェアラブルデバイス2との間で接続を確立した状態において、近距離通信機5を介した無線通信によってウェアラブルデバイス2と情報のやり取りを行う。近距離通信機5とウェアラブルデバイス2との接続が確立されるケースについて、以下で説明を行う。ユーザが車両HVのACC電源をオンにすると、近距離通信機5が起動する。続いて、ユーザのウェアラブルデバイス2と近距離通信機5とがペアリング済みである場合であって、近距離通信機5との接続対象にこのウェアラブルデバイス2が選択された場合に、近距離通信機5とこのウェアラブルデバイス2との接続が確立して通信が開始される。一方、車両HVのACC電源をオフにすると、近距離通信機5の動作が終了し、ウェアラブルデバイス2と近距離通信機5との接続が解消される。
通信部401は、ウェアラブルデバイス2から近距離通信機5で逐次受信する、ユーザの腕に生じる加速度(以下、腕G)を含む生体信号を逐次取得する。実施形態1の例では、腕G以外の生体信号は、推定心拍数及び推定血圧である。この通信部401で実行する処理が請求項の通信機能に相当する。
車両信号取得部402は、車両HVのドライバが操作する操作部材の操作に応じて変動する車両信号を逐次取得する。この車両信号取得部402で実行する処理が請求項の車両信号取得機能に相当する。車両信号の例としては、車両制御ECU6から出力される、加速度センサ7で検出された横G、舵角センサで検出された操舵角、ジャイロセンサで検出された角速度等がある。さらに、ボデーECU8から出力される、ウィンカー信号、エンジンスタートボタンの信号、シフトポジションセンサの信号、ライトスイッチの信号、ルームランプスイッチの信号、パワーウィンドウスイッチの信号等がある。他にも、操作デバイス41から出力される、クルーズコントロールスイッチの信号、カーオーディオの選曲ボタンの操作に応じた信号、エアコンスイッチの信号等がある。実施形態1では、便宜上、この車両信号として横Gを取得する場合を一例に挙げて説明を行う。
装着判定部403は、車両信号取得部402で取得した車両HVの横Gと、ウェアラブルデバイス2から通信部401で受信したユーザの腕Gとを比較して、近距離通信機5と接続中のウェアラブルデバイス2を車両HVのドライバが装着しているか否か判定する。つまり、HCU40が通信を行っているウェアラブルデバイス2を車両HVのドライバが装着しているか否か判定する。この装着判定部403で実行する処理が請求項の装着判定機能に相当する。
一例として、装着判定部403は、車両HVの横Gが第1の閾値(以下、閾値Cth)を越える場合に、ユーザの腕Gも第2の閾値(以下、閾値Wth)を超えることをもとに、通信接続中のウェアラブルデバイス2を車両HVのドライバが装着しているか否か判定する。判定の具体例については後に詳述する。ここで言うところの閾値Cthは、任意に設定可能な値であって、例えばステアリング操作によって車両HVの方向転換を行う場合に検出される車両HVの横G程度の値としてもよいし、ノイズを除外できる程度に大きい値としてもよい。また、ここで言うところの閾値Wthは、任意に設定可能な値であって、例えばステアリング操作によって車両HVの方向転換を行う場合に検出されるユーザの腕G程度の値としてもよいし、ノイズを除外できる程度に大きい値としてもよい。
車両HVの横Gは、左右の横Gを区別しない正の値であってもよいし、左右で符号が異なる値であってもよい。実施形態1では、自車右方向の横Gは正の値、自車左方向の横Gは負の値である場合を例に挙げて説明を行う。この場合、閾値Cthと比較を行うのは、車両HVの横Gの絶対値とすればよい。
また、ユーザの腕Gとしては、ウェアラブルデバイス2で計測された3軸の加速度を用いて自車の左右方向の加速度に相当する腕Gを算出できる場合には、この自車の左右方向の加速度に相当する腕Gを用いる構成とすればよい。しかしながら、自車の左右方向の加速度に相当する腕Gを算出することは困難である。よって、実施形態1では、簡略化のため、ウェアラブルデバイス2で計測された3軸の加速度の合算値を算出し、この合算値をユーザの腕Gとして以降の処理に用いる。合算値は、例えば以下の(1)式によって求めればよい。(1)式のaxがウェアラブルデバイス2で計測されたx軸の加速度、ayがウェアラブルデバイス2で計測されたy軸の加速度、azがウェアラブルデバイス2で計測されたz軸の加速度を示している。
ここで、図5及び図6を用いて、車両HVの横Gとユーザの腕Gとを比較することで、通信接続中のウェアラブルデバイス2を車両HVのドライバが装着しているか否か判定できることについて説明を行う。ここでは、ウェアラブルデバイス2を装着したドライバが、車両HVのステアリングを操作して右隣接車線に車線変更する場合を例に挙げて説明を行う。
車両HVのステアリングを操作して右隣接車線に車線変更する場合、図5の破線の矢印に示すように、車両HVは一旦右に方向転換した後に左に方向転換をして直進状態に戻ることになる。ここで、右に方向転換を開始するタイミングをt1、左に方向転換を開始するタイミングをt2とする。図5の例では、t1のタイミングではステアリングホイールを右に回す操作がドライバによって行われており、t2のタイミングではステアリングホイールを左に回して中立位置に戻す操作が行われている。
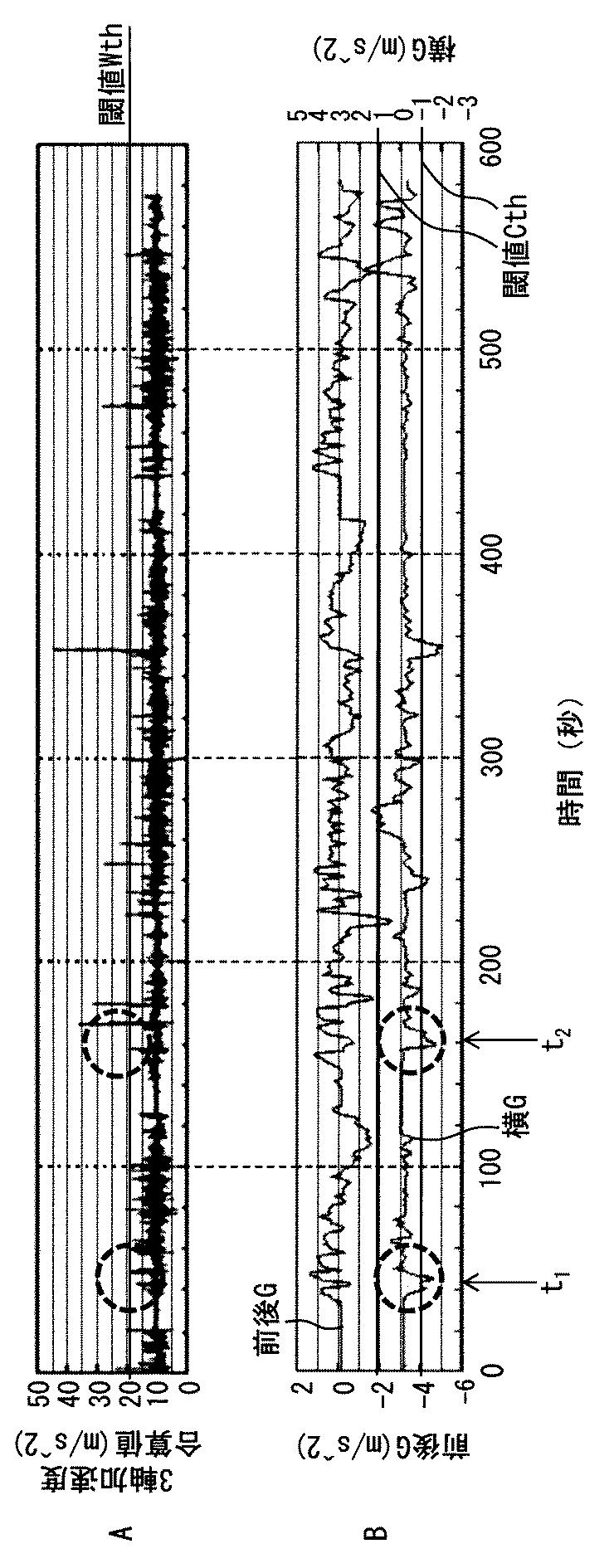
続いて、図6を用いて、図5の例における車両HVの横Gとユーザの腕Gとの関係について説明を行う。図6のAが、3軸加速度の合算値であるユーザの腕Gの時間変化を表すグラフ、図6のBが車両HVの前後方向の加速度(つまり、前後G)と横Gとの時間変化を表すグラフである。図6に示すように、t1及びt2のタイミングでは、車両HVの方向転換によって車両HVに横Gが発生するので、車両HVの横Gが閾値Cth(図6の例では1m/s2)を越える。また、t1及びt2のタイミングでは、ドライバがステアリングホイールを操作するので、ユーザの腕Gも閾値Wth(図6の例では20m/s2)を越える。よって、車両HVの横Gの変動とユーザの腕Gの変動との間に相関があるか否かによって、通信接続中のウェアラブルデバイス2を車両HVのドライバが装着しているか否か判定することができる。
図4に戻って、ドライバ状態判定部404は、装着判定部403において、通信接続中のウェアラブルデバイス2をドライバが装着していると判定した場合に、ウェアラブルデバイス2から近距離通信機5で受信した推定心拍数及び推定血圧といった生体信号をもとに、ドライバ状態を判定する。このドライバ状態判定部404が請求項の状態判定部に相当する。
一例として、心拍数及び血圧と運転不適切状態とを予め対応付けたマトリクスをもとに、運転不適切状態を判定する構成とすればよい。判定される運転不適切状態の度合いとしては、例えば「運転不適切」、「運転適切」等がある。他にも、心拍数及び血圧と覚醒状態を予め対応付けたマトリクスをもとに、覚醒状態を判定する構成としてもよい。判定される覚醒状態の度合いとしては、例えば覚醒度の高いものから「覚醒状態」、「漫然状態」、「眠気状態」、「睡眠状態」等がある。なお、心拍変動の揺らぎ解析によって覚醒状態を判定する構成としてもよい。
また、ドライバ状態判定部404は、判定したドライバ状態を、電気的に読み書き可能な不揮発性メモリに逐次記録していく構成としてもよい。これによれば、車両HVの運行時のドライバ状態を後で確認することが可能になり、商用車ではドライバの運行管理に利用することができる。また、自家用車では事故時の検証等に利用することができる。
提示制御部405は、装着判定部403において、通信接続中のウェアラブルデバイス2をドライバが装着していないと判定した場合に、表示装置42及び/又は音声出力装置43から警告を出力させる。通信接続中のウェアラブルデバイス2をドライバが装着していないと判定される場合の状況としては、通信接続中のウェアラブルデバイス2をドライバ以外の乗員が装着している場合、通信接続中のウェアラブルデバイス2が未装着且つ電源がオンになった状態で車室内に置かれている場合等が挙げられる。
また、提示制御部405は、ドライバ状態判定部404で判定したドライバ状態が警告を要する状態である場合に、表示装置42及び/又は音声出力装置43から情報提示を行わせる。例えば、運転不適切状態の度合いを「運転不適切」と判定した場合には、同乗者に向けてドライバの運転不適切を知らせる情報提示を行わせる。また、判定した覚醒状態が、例えば「漫然状態」といった所定の覚醒度以下の場合に、覚醒を促す警告音を出力させたり、ドライバの覚醒度を示す情報提示を行わせたりする構成としてもよい。
切替制御部406は、装着判定部403において、通信接続中のウェアラブルデバイス2をドライバが装着していないと判定した場合に、通信部401で無線通信によって情報のやり取りを行うウェアラブルデバイス2を切り替えさせる。例えば、切替制御部406でのウェアラブルデバイス2の切り替えは、複数台のペアリングを記憶するマルチペアリング機能によって記憶しているウェアラブルデバイス2を複数検出できている場合に限って実行する構成とすればよい。
切替制御部406は、車室内に存在する複数台のウェアラブルデバイス2のうちから切替先を指定して切替を行うことが可能な場合には、通信接続中のウェアラブルデバイス2以外への切替を指定して切替を行う構成とすればよい。車室内に存在する複数台のウェアラブルデバイス2のうちから切替先を指定して切替を行うことが可能でない場合には、通信接続中のウェアラブルデバイス2との接続を解除することで、通信接続中のウェアラブルデバイス2以外への切替を促す構成とすればよい。一例として、通信接続中のウェアラブルデバイス2との接続を解除する場合に、そのウェアラブルデバイス2の電源をオフにさせる要求をそのウェアラブルデバイス2に送信してそのウェアラブルデバイス2の電源をオフにする構成としてもよい。これによれば、通信接続中のウェアラブルデバイス2以外への切替をより確実に行うことが可能になる。
<ドライバ状態判定関連処理>
図7のフローチャートを用いて、HCU40でのドライバ状態の判定に関連する処理(以下、ドライバ状態判定関連処理)の流れの一例について説明を行う。図7のフローチャートは、車両HVのイグニション電源がオンになった場合に開始する構成とすればよい。
図7のフローチャートを用いて、HCU40でのドライバ状態の判定に関連する処理(以下、ドライバ状態判定関連処理)の流れの一例について説明を行う。図7のフローチャートは、車両HVのイグニション電源がオンになった場合に開始する構成とすればよい。
まず、ステップS1では、ウェアラブルデバイス2と近距離通信機5との接続が確立し、通信部401での近距離通信機5を介したウェアラブルデバイス2との通信が可能となった場合(S1でYES)に、ステップS2に移る。一方、ウェアラブルデバイス2と近距離通信機5との接続が確立せず、通信部401での近距離通信機5を介したウェアラブルデバイス2との通信が可能となっていない場合(S1でNO)には、ステップS14に移る。
ステップS2では、通信部401が、ウェアラブルデバイス2から近距離通信機5で受信する、ユーザの腕Gを含む生体信号の取得を開始する。生体信号の取得を開始した後は、ウェアラブルデバイス2から近距離通信機5で受信する生体信号を逐次取得していくものとする。
ステップS3では、車両信号取得部402が、車両制御ECU6から出力される、加速度センサ7で検出された車両HVの横Gの取得を開始する。車両HVの横Gの取得を開始した後は、車両HVの横Gを逐次取得していくものとする。
ステップS4では、装着判定部403が、車両信号取得部402で取得した車両HVの横Gの絶対値が閾値Cthを越えているか判定する。そして、車両HVの横Gの絶対値が閾値Cthを越えていると判定した場合(S4でYES)には、ステップS5に移る。一方、車両HVの横Gの絶対値が閾値Cthを越えていないと判定した場合(S4でNO)には、ステップS10に移る。
ステップS5では、装着判定部403が、S4で車両HVの横Gの絶対値が閾値Cthを越えていると判定したのと同じタイミングにおいて、通信部401で受信したユーザの腕Gも閾値Wthを越えているか比較する。ここで言うところの同じタイミングは、必ずしも完全な一致に限らず、誤差程度の時間差も許容するものとする。また、誤差程度の時間差には、ドライバの運転操作が車両HVの挙動に反映されるまでの時間差等を含むものとする。
ステップS6では、S5での比較の回数がn回に達した場合(S6でYES)には、ステップS7に移る。一方、S5での比較の回数がn回に達していない場合(S6でNO)には、ステップS10に移り、ドライバ状態判定関連処理の終了タイミングでなければ、S5での比較をさらに実施する。ここで言うところのn回とは任意に設定可能な所定の複数回である。
ステップS7では、装着判定部403が、直近のn回のS5での比較のうち、車両HVの横Gの絶対値が閾値Cthを越えているうえに、ユーザの腕Gも閾値Wthを越えている事象が成立した割合を算出する。そして、算出した割合がP%以上であった場合(S7でYES)には、ステップS8に移る。一方、算出した割合がP%未満であった場合(S7でNO)には、ステップS11に移る。ここで言うところのP%とは任意に設定可能な値であって、例えば50%よりも大きい値を設定すればよい。
ステップS8では、装着判定部403が、通信接続中のウェアラブルデバイス2を車両HVのドライバが装着していると判定する。ステップS9では、ドライバ状態判定部404が、ウェアラブルデバイス2から近距離通信機5で受信した推定心拍数及び推定血圧をもとに、ドライバ状態を判定する。なお、ドライバ状態判定部404でドライバ状態を判定した後は、前述したように、判定したドライバ状態を、電気的に読み書き可能な不揮発性メモリに記録すればよい。他にも、前述したように、判定したドライバ状態が警告を要する状態である場合に、表示装置42及び/又は音声出力装置43から情報提示を行わせればよい。
ステップS10では、ドライバ状態判定関連処理の終了タイミングであった場合(S10でYES)には、ドライバ状態判定関連処理を終了する。一方、ドライバ状態判定関連処理の終了タイミングでなかった場合(S10でNO)には、S4に戻って処理を繰り返す。ドライバ状態判定関連処理の終了タイミングの一例としては、車両HVのイグニッション電源がオフになったこと等がある。
S7で算出した割合がP%未満であった場合に行われるステップS11では、装着判定部403が、通信接続中のウェアラブルデバイス2を車両HVのドライバが装着していないと判定する。
ステップS12では、提示制御部405が、表示装置42及び/又は音声出力装置43から警告を出力させる。警告の一例としては、警告音を出力する構成としてもよいし、ドライバにウェアラブルデバイス2を装着するように促すメッセージを表示及び/又は音声出力したりする構成としてもよい。なお、ウェアラブルデバイス2を装着していない側の腕のみをステアリング操作に用いる片手運転をドライバが定常的に行っている場合にも、通信接続中のウェアラブルデバイス2を車両HVのドライバが装着していないと判定されることになる。よって、ドライバにウェアラブルデバイス2を装着するように促すメッセージに加え、ドライバに両手運転を行うように促すメッセージも追加する構成としてもよい。
ステップS13では、切替制御部406が、通信接続するウェアラブルデバイス2を切り替えさせる。ステップS14では、ドライバ状態判定関連処理の終了タイミングであった場合(S14でYES)には、ドライバ状態判定関連処理を終了する。一方、ドライバ状態判定関連処理の終了タイミングでなかった場合(S14でNO)には、S1に戻って処理を繰り返す。
<実施形態1のまとめ>
前述したように、ウェアラブルデバイス2を装着しているユーザがドライバであれば、車両HVの横Gとユーザの腕Gとの間には相関が生じる。実施形態1の構成によれば、この車両HVの横Gとユーザの腕Gとを比較して、ウェアラブルデバイス2をドライバが装着しているか否かを判定するので、ドライバが装着しているウェアラブルデバイス2をより容易に特定することが可能になる。
前述したように、ウェアラブルデバイス2を装着しているユーザがドライバであれば、車両HVの横Gとユーザの腕Gとの間には相関が生じる。実施形態1の構成によれば、この車両HVの横Gとユーザの腕Gとを比較して、ウェアラブルデバイス2をドライバが装着しているか否かを判定するので、ドライバが装着しているウェアラブルデバイス2をより容易に特定することが可能になる。
また、実施形態1の構成によれば、車両HVの横Gの絶対値が閾値Cthを越えているうえに、ユーザの腕Gも閾値Wthを越えている事象が成立した割合によって、通信接続中のウェアラブルデバイス2を車両HVのドライバが装着していると判定する。よって、ノイズによる誤判定が生じる可能性を減らし、判定精度を向上することが可能になる。
(変形例1)
実施形態1では、車両HVの横Gの絶対値が閾値Cthを越えているうえに、ユーザの腕Gも閾値Wthを越えている事象が成立した割合がP%以上の場合に、通信接続中のウェアラブルデバイス2を車両HVのドライバが装着していると装着判定部403が判定する構成を示したが、必ずしもこれに限らない。例えば、車両HVの横Gの絶対値が閾値Cthを越えているうえに、ユーザの腕Gも閾値Wthを越えている事象が成立した回数が所定の複数回を越えた場合に、通信接続中のウェアラブルデバイス2を車両HVのドライバが装着していると装着判定部403が判定する構成としてもよい。
実施形態1では、車両HVの横Gの絶対値が閾値Cthを越えているうえに、ユーザの腕Gも閾値Wthを越えている事象が成立した割合がP%以上の場合に、通信接続中のウェアラブルデバイス2を車両HVのドライバが装着していると装着判定部403が判定する構成を示したが、必ずしもこれに限らない。例えば、車両HVの横Gの絶対値が閾値Cthを越えているうえに、ユーザの腕Gも閾値Wthを越えている事象が成立した回数が所定の複数回を越えた場合に、通信接続中のウェアラブルデバイス2を車両HVのドライバが装着していると装着判定部403が判定する構成としてもよい。
(変形例2)
また、車両HVの横Gの絶対値が閾値Cthを越えているうえに、ユーザの腕Gも閾値Wthを越えている事象が1回でも成立した場合に、通信接続中のウェアラブルデバイス2を車両HVのドライバが装着していると装着判定部403が判定する構成としてもよい。
また、車両HVの横Gの絶対値が閾値Cthを越えているうえに、ユーザの腕Gも閾値Wthを越えている事象が1回でも成立した場合に、通信接続中のウェアラブルデバイス2を車両HVのドライバが装着していると装着判定部403が判定する構成としてもよい。
(変形例3)
また、図7のフローチャートのS4において、車両信号取得部402で取得した車両HVの横Gの絶対値が閾値Cthを越えていることに加え、この横Gの時間微分値が第3の閾値(以下、閾値th_ΔG)を越えることも条件に追加する構成としてもよい。ここで言うところの閾値th_ΔGとは、任意に設定可能な値であって、例えばドライバの運転操作による横Gの変化でない、路面の変化等の環境による横Gの変化によるノイズを除外できる程度の値とすればよい。横Gの時間微分値が閾値th_ΔGを越えることも条件に追加することによって、ドライバの運転操作以外によるノイズを除外しやすくなり、装着判定部403での判定精度が向上する。
また、図7のフローチャートのS4において、車両信号取得部402で取得した車両HVの横Gの絶対値が閾値Cthを越えていることに加え、この横Gの時間微分値が第3の閾値(以下、閾値th_ΔG)を越えることも条件に追加する構成としてもよい。ここで言うところの閾値th_ΔGとは、任意に設定可能な値であって、例えばドライバの運転操作による横Gの変化でない、路面の変化等の環境による横Gの変化によるノイズを除外できる程度の値とすればよい。横Gの時間微分値が閾値th_ΔGを越えることも条件に追加することによって、ドライバの運転操作以外によるノイズを除外しやすくなり、装着判定部403での判定精度が向上する。
(実施形態2)
実施形態1では、車両信号取得部402が車両信号として横Gを取得する場合を例に挙げて説明を行ったが、実施形態2では、車両信号取得部402が車両信号としてウィンカー信号を取得する場合を例に挙げて説明を行う。
実施形態1では、車両信号取得部402が車両信号として横Gを取得する場合を例に挙げて説明を行ったが、実施形態2では、車両信号取得部402が車両信号としてウィンカー信号を取得する場合を例に挙げて説明を行う。
以下、本発明の実施形態2について図面を用いて説明する。実施形態2のドライバ状態判定システム1は、車両信号として横Gの代わりにウィンカー信号を用いる分だけ装着判定部403での処理が異なる点を除けば、実施形態1のドライバ状態判定システム1と同様である。
実施形態2の装着判定部403は、車両信号取得部402で取得した車両HVのウィンカー信号と、ウェアラブルデバイス2から通信部401で受信したユーザの腕Gとを比較して、通信接続中のウェアラブルデバイス2を車両HVのドライバが装着しているか否か判定する。
一例として、装着判定部403は、車両HVのウィンカー信号がオンになったタイミングと、ユーザの腕Gが閾値Wthを超えたタイミングとが一致することをもとに、通信接続中のウェアラブルデバイス2を車両HVのドライバが装着しているか否か判定する。判定の具体例については後に詳述する。なお、実施形態2では、実施形態1と同様の閾値Wthを用いる構成を例に挙げて説明を行うが、実施形態1と同様の閾値を用いない構成としてもよい。例えば、ウィンカーレバー操作を行う場合に検出されるユーザの腕G程度の値を閾値として用いる等してもよい。この閾値が請求項の規定値に相当する。
ここで、図8を用いて、車両HVのウィンカー信号とユーザの腕Gとを比較することで、通信接続中のウェアラブルデバイス2を車両HVのドライバが装着しているか否か判定できることについて説明を行う。図8は、車両HVのウィンカー信号とユーザの腕Gとの関係の一例を示した図である。図8のAが、3軸加速度の合算値であるユーザの腕Gの時間変化を表すグラフ、図8のCが車両HVの右ウィンカー信号及び左ウィンカー信号のオンオフの時間変化を表すグラフである。
図8の破線の円で示すように、ウィンカー信号がオフからオンに切り替わるタイミングでは、ドライバがウィンカーレバーを操作しているので、ユーザの腕Gも閾値Wthを越える。よって、ウィンカー信号がオフからオンに切り替わるタイミングと同じタイミングにおいて、ユーザの腕Gにも変動があるか否かによって、通信接続中のウェアラブルデバイス2を車両HVのドライバが装着しているか否か判定することができる。
続いて、図9のフローチャートを用いて、実施形態2におけるHCU40でのドライバ状態判定関連処理の流れの一例について説明を行う。図9のフローチャートは、車両HVのイグニション電源がオンになった場合に開始する構成とすればよい。
まず、ステップS21〜ステップS22までの処理は、S1〜S2の処理と同様である。ステップS23では、車両信号取得部402が、ボデーECU8から出力されるウィンカー信号の取得を開始する。ウィンカー信号の取得を開始した後は、ウィンカー信号を逐次取得していくものとする。
ステップS24では、装着判定部403が、車両信号取得部402で取得したウィンカー信号がオフからオンに切り替わったタイミングであるか判定する。そして、ウィンカー信号がオフからオンに切り替わったタイミングであると判定した場合(S24でYES)には、ステップS25に移る。一方、車両HVの横Gの絶対値が閾値Cthを越えていないと判定した場合(S24でNO)には、ステップS10に移る。
ステップS25では、装着判定部403が、ウィンカー信号がオフからオンに切り替わったタイミングと同じタイミングにおいて、通信部401で受信したユーザの腕Gも閾値Wthを越えているか比較する。ここで言うところの同じタイミングは、必ずしも完全な一致に限らず、誤差程度の時間差も許容するものとする。
ステップS26では、S6と同様にして、S25での比較の回数がn回に達した場合(S6でYES)には、ステップS27に移る。一方、S25での比較の回数がn回に達していない場合(S26でNO)には、ステップS30に移り、ドライバ状態判定関連処理の終了タイミングでなければ、S25での比較をさらに実施する。
ステップS27では、S7と同様にして、装着判定部403が、直近のn回のS5での比較のうち、ウィンカー信号がオフからオンに切り替わったタイミングと同じタイミングにおいてユーザの腕Gが閾値Wthを越えている事象が成立した割合を算出する。そして、算出した割合がP%以上であった場合(S27でYES)には、ステップS28に移る。一方、算出した割合がP%未満であった場合(S27でNO)には、ステップS31に移る。ステップS28〜ステップS34の処理は、S8〜S14の処理と同様である。
前述したように、ウェアラブルデバイス2を装着しているユーザがドライバであれば、車両HVのウィンカー信号とユーザの腕Gとの間には相関が生じる。実施形態2の構成によれば、このウィンカー信号とユーザの腕Gとを比較して、ウェアラブルデバイス2をドライバが装着しているか否かを判定するので、ドライバが装着しているウェアラブルデバイス2をより容易に特定することが可能になる。
なお、実施形態2の構成は、車両HVに設けられたスイッチ及びレバーの少なくともいずれかのオンオフの操作に応じて出力される車両信号を用いる構成であれば、ウィンカー信号以外を用いる構成にも適用できる。例えば、前述したエンジンスタートボタンの信号、ライトスイッチの信号、ルームランプスイッチの信号、パワーウィンドウスイッチの信号、クルーズコントロールスイッチの信号、カーオーディオの選曲ボタンの操作に応じた信号及びエアコンスイッチの信号を用いる構成にも適用できる。
なお、ウィンカーレバーとは異なり、ドライバが対応する操作部材の操作を行わなければオンからオフに切り替わらない車両信号については、車両信号がオンからオフに切り替わったタイミングと同じタイミングにおいて、通信部401で受信したユーザの腕Gも閾値Wthを越えているか比較する構成としてもよい。
また、シフトポジションセンサの信号のように、2段階よりも多い複数段階の変化が生じる信号については、信号の変化のタイミングと同じタイミングにおいて、通信部401で受信したユーザの腕Gも閾値Wthを越えているか比較する構成とすればよい。
(変形例4)
実施形態2では、ウィンカー信号がオフからオンに切り替わったタイミングと同じタイミングにおいて、ユーザの腕Gが閾値Wthを越えている事象が成立した割合がP%以上の場合に、通信接続中のウェアラブルデバイス2を車両HVのドライバが装着していると装着判定部403が判定する構成を示したが、必ずしもこれに限らない。例えば、ウィンカー信号がオフからオンに切り替わったタイミングと同じタイミングにおいて、ユーザの腕Gが閾値Wthを越えている事象が成立した回数が所定の複数回を越えた場合に、通信接続中のウェアラブルデバイス2を車両HVのドライバが装着していると装着判定部403が判定する構成としてもよい。
実施形態2では、ウィンカー信号がオフからオンに切り替わったタイミングと同じタイミングにおいて、ユーザの腕Gが閾値Wthを越えている事象が成立した割合がP%以上の場合に、通信接続中のウェアラブルデバイス2を車両HVのドライバが装着していると装着判定部403が判定する構成を示したが、必ずしもこれに限らない。例えば、ウィンカー信号がオフからオンに切り替わったタイミングと同じタイミングにおいて、ユーザの腕Gが閾値Wthを越えている事象が成立した回数が所定の複数回を越えた場合に、通信接続中のウェアラブルデバイス2を車両HVのドライバが装着していると装着判定部403が判定する構成としてもよい。
(変形例5)
また、ウィンカー信号がオフからオンに切り替わったタイミングと同じタイミングにおいて、ユーザの腕Gが閾値Wthを越えている事象が1回でも成立した場合に、通信接続中のウェアラブルデバイス2を車両HVのドライバが装着していると装着判定部403が判定する構成としてもよい。
また、ウィンカー信号がオフからオンに切り替わったタイミングと同じタイミングにおいて、ユーザの腕Gが閾値Wthを越えている事象が1回でも成立した場合に、通信接続中のウェアラブルデバイス2を車両HVのドライバが装着していると装着判定部403が判定する構成としてもよい。
(実施形態3)
また、実施形態1及び実施形態2で述べた以外の車両信号であっても、車両のドライバが操作する操作部材の操作に応じて変動する車両信号であれば、装着判定部403での判定に用いる構成(以下、実施形態3)とすることができる。実施形態1及び実施形態2で述べた以外の車両信号であって、車両のドライバが操作する操作部材の操作に応じて変動する車両信号の一例としては、ジャイロセンサで検出する車両HVの角速度、舵角センサで検出する車両HVの操舵角等がある。
また、実施形態1及び実施形態2で述べた以外の車両信号であっても、車両のドライバが操作する操作部材の操作に応じて変動する車両信号であれば、装着判定部403での判定に用いる構成(以下、実施形態3)とすることができる。実施形態1及び実施形態2で述べた以外の車両信号であって、車両のドライバが操作する操作部材の操作に応じて変動する車両信号の一例としては、ジャイロセンサで検出する車両HVの角速度、舵角センサで検出する車両HVの操舵角等がある。
ここで、図10を用いて、車両HVの角速度とユーザの腕Gとを比較することで、通信接続中のウェアラブルデバイス2を車両HVのドライバが装着しているか否か判定できることについて説明を行う。図10は、車両HVのステアリングを操作して車両HVの方向転換が複数回行われた場合における、車両HVの角速度とユーザの腕Gとの関係の一例を示した図である。図10のAが、3軸加速度の合算値であるユーザの腕Gの時間変化を表すグラフ、図10のDが車両HVの速度及び角速度の時間変化を表すグラフである。
実施形態1において図6を用いて説明したように、車両HVの方向転換時には、ドライバがステアリングホイールを操作するので、ユーザの腕Gが閾値Wthを越える。これに対して、図10の破線の円で示すように、ユーザの腕Gが閾値Wthを越える場合には、車両HVの角速度も相関して変動する。よって、車両HVの角速度の変動とユーザの腕Gの変動との間に相関があるか否かによって、通信接続中のウェアラブルデバイス2を車両HVのドライバが装着しているか否か判定することができる。
例えば、実施形態3の装着判定部403は、車両HVの角速度の絶対値が所定の閾値を越える場合に、ユーザの腕Gも閾値Wthを超えることをもとに、実施形態1及びその変形例で述べたようにして、通信接続中のウェアラブルデバイス2を車両HVのドライバが装着しているか否か判定する構成とすればよい。ここで言うところの所定の閾値は、任意に設定可能な値であって、例えばステアリング操作によって車両HVの方向転換を行う場合に検出される車両HVの角速度程度の値としてもよいし、ノイズを除外できる程度に大きい値としてもよい。なお、車両HVの角速度の代わりに車両HVの操舵角を用いる場合についても同様にすればよい。
前述したように、ウェアラブルデバイス2を装着しているユーザがドライバであれば、車両HVの角速度とユーザの腕Gとの間には相関が生じる。実施形態3の構成によれば、この車両HVの角速度とユーザの腕Gとを比較して、ウェアラブルデバイス2をドライバが装着しているか否かを判定するので、ドライバが装着しているウェアラブルデバイス2をより容易に特定することが可能になる。なお、車両HVの角速度の代わりに車両HVの操舵角を用いる場合についても同様である。
(変形例6)
また、装着判定部403が、前述の実施形態で述べたような複数種類の車両信号の各々について、ウェアラブルデバイス2から通信部401で受信したユーザの腕Gと比較した結果を総合して、通信接続中のウェアラブルデバイス2をドライバが装着しているか否か判定する構成(以下、変形例6)としてもよい。
また、装着判定部403が、前述の実施形態で述べたような複数種類の車両信号の各々について、ウェアラブルデバイス2から通信部401で受信したユーザの腕Gと比較した結果を総合して、通信接続中のウェアラブルデバイス2をドライバが装着しているか否か判定する構成(以下、変形例6)としてもよい。
一例としては、車両HVの横Gとユーザの腕Gとを比較することで判定した結果と、車両HVのウィンカー信号ユーザの腕Gとを比較することで判定した結果とのいずれもが、装着しているとの判定結果であった場合に、通信接続中のウェアラブルデバイス2をドライバが装着していると判定する構成とすればよい。この場合、いずれかでも装着していないとの判定結果が得られた場合には、通信接続中のウェアラブルデバイス2をドライバが装着していないと判定する構成とすればよい。これによれば、通信接続中のウェアラブルデバイス2をドライバが装着していないにも関わらず、装着していると判定される誤判定を低減することが可能になる。
一方、車両HVの横Gとユーザの腕Gとを比較することで判定した結果と、車両HVのウィンカー信号ユーザの腕Gとを比較することで判定した結果とのいずれもが、装着していないとの判定結果であった場合に、通信接続中のウェアラブルデバイス2をドライバが装着していないと判定する構成としてもよい。この場合、いずれかでも装着しているとの判定結果が得られた場合には、通信接続中のウェアラブルデバイス2をドライバが装着していると判定する構成とすればよい。これによれば、通信接続中のウェアラブルデバイス2をドライバが装着しているにも関わらず、装着していないと判定される誤判定を低減することが可能になる。なお、上述した車両信号の種類の組み合わせはあくまで一例であって、他の組み合わせとしても構わない。
また、ドライバがウェアラブルデバイス2を装着している側の腕で操作部材を操作するのに応じて変動する車両信号を、より確実に装着判定部403での判定に用いることができるように、車両信号の種類を組み合わせることが好ましい。詳しくは、ドライバが左右の腕でそれぞれ操作する各操作部材を操作するのに応じてそれぞれ変動する車両信号について、ユーザの腕Gと比較した結果を総合して、ウェアラブルデバイス2をドライバが装着しているか否か判定する構成とすればよい。
車両HVが車体の右寄りに運転席が設けられた車両である場合の具体例としては、ドライバが右手で操作を行うウィンカーレバーの操作に応じたウィンカー信号とユーザの腕Gとを比較することで判定した結果と、ドライバが左手で操作を行うシフトレバーの操作に応じたシフトポジションセンサの信号とユーザの腕Gとを比較することで判定した結果とを総合すればよい。そして、ウィンカー信号とユーザの腕Gとを比較することで判定した結果と、シフトポジションセンサの信号とユーザの腕Gとを比較することで判定した結果とのいずれかでも装着しているとの判定結果が得られた場合に、通信接続中のウェアラブルデバイス2をドライバが装着していると判定する構成とすればよい。一方、いずれでも装着していないとの判定結果が得られた場合に、通信接続中のウェアラブルデバイス2をドライバが装着していないと判定する構成とすればよい。
なお、上述したような、複数種類の車両信号を総合する例に限らず、時間的に総合する構成としてもよい。一例としては,車両HVの横Gとユーザの腕Gとを異なる時刻において判定した結果のいずれもが、装着しているとの判定結果であった場合に、通信接続中のウェアラブルデバイス2をドライバが装着していると判定する構成とすればよい。
(変形例7)
前述の実施形態では、通信接続中のウェアラブルデバイス2を車両HVのドライバが装着していないと装着判定部403が判定した場合に、提示制御部405が警告を出力させるとともに、切替制御部406が通信接続するウェアラブルデバイス2を切り替えさせる構成を示したが、必ずしもこれに限らない。例えば、通信接続中のウェアラブルデバイス2を車両HVのドライバが装着していないと装着判定部403が判定した場合であっても、提示制御部405が警告を出力させない構成としてもよい。
前述の実施形態では、通信接続中のウェアラブルデバイス2を車両HVのドライバが装着していないと装着判定部403が判定した場合に、提示制御部405が警告を出力させるとともに、切替制御部406が通信接続するウェアラブルデバイス2を切り替えさせる構成を示したが、必ずしもこれに限らない。例えば、通信接続中のウェアラブルデバイス2を車両HVのドライバが装着していないと装着判定部403が判定した場合であっても、提示制御部405が警告を出力させない構成としてもよい。
(変形例8)
また、切替制御部406を備えず、通信接続中のウェアラブルデバイス2を車両HVのドライバが装着していないと装着判定部403が判定した場合であっても、通信接続するウェアラブルデバイス2を切り替えさせない構成としてもよい。
また、切替制御部406を備えず、通信接続中のウェアラブルデバイス2を車両HVのドライバが装着していないと装着判定部403が判定した場合であっても、通信接続するウェアラブルデバイス2を切り替えさせない構成としてもよい。
(変形例9)
また、前述の実施形態では、提示制御部405が、車両に搭載された表示装置42及び/又は音声出力装置43から警告を出力させる構成を示したが、必ずしもこれに限らない。例えば、提示制御部405が、通信部401及び近距離通信機5を介して、通信接続中のウェアラブルデバイス2に警告を出力させる要求を送信し、ウェアラブルデバイス2の提示部24から警告を出力させる構成としてもよい。
また、前述の実施形態では、提示制御部405が、車両に搭載された表示装置42及び/又は音声出力装置43から警告を出力させる構成を示したが、必ずしもこれに限らない。例えば、提示制御部405が、通信部401及び近距離通信機5を介して、通信接続中のウェアラブルデバイス2に警告を出力させる要求を送信し、ウェアラブルデバイス2の提示部24から警告を出力させる構成としてもよい。
(変形例10)
また、前述の実施形態では、ドライバ状態判定部404が、装着判定部403において、通信接続中のウェアラブルデバイス2をドライバが装着していると判定した場合に、ウェアラブルデバイス2から受信した生体信号をもとにドライバ状態を判定する構成を示したが、必ずしもこれに限らない。例えば、装着判定部403での判定結果に関わらず、ドライバ状態判定部404が、ウェアラブルデバイス2から受信した生体信号をもとにドライバ状態を判定する構成としてもよい。
また、前述の実施形態では、ドライバ状態判定部404が、装着判定部403において、通信接続中のウェアラブルデバイス2をドライバが装着していると判定した場合に、ウェアラブルデバイス2から受信した生体信号をもとにドライバ状態を判定する構成を示したが、必ずしもこれに限らない。例えば、装着判定部403での判定結果に関わらず、ドライバ状態判定部404が、ウェアラブルデバイス2から受信した生体信号をもとにドライバ状態を判定する構成としてもよい。
(変形例11)
また、HCU40は、ウェアラブルデバイス2から近距離通信機5で受信した生体信号をサーバに送信し、サーバ側で判定させたドライバ状態を取得する構成としてもよい。
また、HCU40は、ウェアラブルデバイス2から近距離通信機5で受信した生体信号をサーバに送信し、サーバ側で判定させたドライバ状態を取得する構成としてもよい。
(変形例12)
また、ウェアラブルデバイス2は、携帯電話機を介してHCU40と情報のやり取りを行う構成としてもよい。
また、ウェアラブルデバイス2は、携帯電話機を介してHCU40と情報のやり取りを行う構成としてもよい。
なお、本発明は、上述した実施形態及び変形例に限定されるものではなく、請求項に示した範囲で種々の変更が可能であり、異なる実施形態及び変形例にそれぞれ開示された技術的手段を適宜組み合わせて得られる実施形態についても本発明の技術的範囲に含まれる。
1 ドライバ状態判定システム(車両用システム)、2 ウェアラブルデバイス、3 車両側ユニット、5 近距離通信機、7 加速度センサ、40 HCU(車載装置)、42 表示装置(情報提示装置)、43 音声出力装置(情報提示装置)、211 加速度センサ、401 通信部、402 車両信号取得部、403 装着判定部、404 ドライバ状態判定部(状態判定部)、405 提示制御部、406 切替制御部
Claims (12)
- 車両で用いられるとともに、前記車両のドライバが操作する操作部材の操作に応じて変動する車両信号を取得する車両信号取得部(402)を備える車載装置であって、
ユーザの腕のいずれかの部位である腕部に装着されて、前記腕部に生じる加速度を含む前記ユーザの生体情報を計測するウェアラブルデバイス(2)と、無線通信によって情報のやり取りを行う通信部(401)と、
前記車両信号取得部で取得した前記車両信号と、前記ウェアラブルデバイスから前記通信部で受信した前記腕部に生じる加速度とを比較して、前記ウェアラブルデバイスを前記ドライバが装着しているか否か判定する装着判定部(403)とを備える車載装置。 - 請求項1において、
前記車両信号取得部は、前記車両信号として前記車両の横加速度を取得し、
前記装着判定部は、前記車両信号取得部で取得した前記車両の横加速度が第1の閾値を越える場合に、前記ウェアラブルデバイスから前記通信部で受信した前記腕部に生じる加速度も第2の閾値を越えることをもとに、前記ウェアラブルデバイスを前記ドライバが装着していると判定する車載装置。 - 請求項2において、
前記装着判定部は、前記車両信号取得部で取得した前記車両の横加速度が第1の閾値を越え、且つ、この横加速度の時間微分値が第3の閾値を越える場合に、前記ウェアラブルデバイスから前記通信部で受信した前記腕部に生じる加速度も第2の閾値を越えることをもとに、前記ウェアラブルデバイスを前記ドライバが装着していると判定する車載装置。 - 請求項1〜3のいずれか1項において、
前記車両信号取得部は、前記車両に設けられたスイッチ及びレバーの少なくともいずれかの操作に応じて出力される車両信号を取得し、
前記装着判定部は、前記車両信号取得部で取得した前記車両信号の変動のタイミングと、前記ウェアラブルデバイスから前記通信部で受信した前記腕部に生じる加速度の規定値以上の変動のタイミングとが一致することをもとに、前記ウェアラブルデバイスを前記ドライバが装着していると判定する車載装置。 - 請求項1〜4のいずれか1項において、
前記車両信号取得部は、複数種類の前記車両信号を取得し、
前記装着判定部は、前記車両信号取得部で取得した複数種類の前記車両信号の各々について、前記ウェアラブルデバイスから前記通信部で受信した前記腕部に生じる加速度と比較した結果を総合して、前記ウェアラブルデバイスを前記ドライバが装着しているか否か判定する車載装置。 - 請求項1〜5のいずれか1項において、
前記装着判定部で前記ウェアラブルデバイスを前記ドライバが装着していないと判定した場合に、警告を出力させる提示制御部(405)を備える車載装置。 - 請求項6において、
前記提示制御部は、前記車両に搭載された情報提示装置(42,43)から警告を出力させる車載装置。 - 請求項6において、
前記提示制御部は、前記通信部を介して前記ウェアラブルデバイスに指示を行って前記ウェアラブルデバイスから警告を出力させる車載装置。 - 請求項1〜8のいずれか1項において、
前記装着判定部で前記ウェアラブルデバイスを前記ドライバが装着していないと判定した場合に、前記通信部で無線通信によって情報のやり取りを行う前記ウェアラブルデバイスを切り替えさせる切替制御部(406)を備える車載装置。 - 請求項1〜9のいずれか1項において、
前記装着判定部で前記ウェアラブルデバイスを前記ドライバが装着していると判定した場合に、前記ウェアラブルデバイスから前記通信部で受信した前記ユーザの生体情報を用いて、前記車両のドライバの状態を判定する一方、前記装着判定部で前記ウェアラブルデバイスを前記ドライバが装着していないと判定した場合には、前記車両のドライバの状態を判定しない状態判定部(404)を備える車載装置。 - 請求項1〜10のいずれか1項の車載装置(40)と、
ユーザの腕のいずれかの部位である腕部に装着されて、前記腕部に生じる加速度を含む前記ユーザの生体情報を計測するウェアラブルデバイス(2)とを含む車両用システム。 - 車両のドライバが操作する操作部材の操作に応じて変動する車両信号を取得する車両信号取得機能(402)と、
ユーザの腕のいずれかの部位である腕部に装着されて、前記腕部に生じる加速度を含む前記ユーザの生体情報を計測するウェアラブルデバイス(2)と、無線通信によって情報のやり取りを行う通信機能(401)と、
前記ウェアラブルデバイスから前記通信機能によって受信した前記腕部に生じる加速度と、前記車両信号取得機能によって取得した前記車両信号とを比較して、前記ウェアラブルデバイスを前記ドライバが装着しているか否か判定する装着判定機能(403)とをコンピュータに実行させるプログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016033517A JP2017149273A (ja) | 2016-02-24 | 2016-02-24 | 車載装置、車両用システム、及びプログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016033517A JP2017149273A (ja) | 2016-02-24 | 2016-02-24 | 車載装置、車両用システム、及びプログラム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017149273A true JP2017149273A (ja) | 2017-08-31 |
Family
ID=59740286
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016033517A Pending JP2017149273A (ja) | 2016-02-24 | 2016-02-24 | 車載装置、車両用システム、及びプログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2017149273A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111016782A (zh) * | 2019-12-10 | 2020-04-17 | 上海擎感智能科技有限公司 | 安全驾驶提示系统以及方法 |
| JP7612449B2 (ja) | 2021-02-24 | 2025-01-14 | ダイハツ工業株式会社 | 安全運転支援システム、及びプログラム |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007320457A (ja) * | 2006-06-01 | 2007-12-13 | Toyota Motor Corp | オートライト装置 |
| JP2009002111A (ja) * | 2007-06-25 | 2009-01-08 | Tokai Rika Co Ltd | 人体装着型電子キーの人体動作検出式電子キーシステム |
| JP2013115525A (ja) * | 2011-11-28 | 2013-06-10 | Nakayo Telecommun Inc | 車両システムおよび携帯電話端末 |
| JP2016103264A (ja) * | 2014-11-27 | 2016-06-02 | エレクトロビット オートモーティブ ゲーエムベーハー | 自動車の運転手用の装着可能な器械 |
| JP2016200858A (ja) * | 2015-04-07 | 2016-12-01 | ソニー株式会社 | 情報処理装置、情報処理方法、及びプログラム |
| JP2016223995A (ja) * | 2015-06-03 | 2016-12-28 | パイオニア株式会社 | ドライバ推定装置、制御方法、プログラム及び記憶媒体 |
| JP2017024653A (ja) * | 2015-07-27 | 2017-02-02 | トヨタ自動車株式会社 | 乗員情報取得装置及び車両制御システム |
-
2016
- 2016-02-24 JP JP2016033517A patent/JP2017149273A/ja active Pending
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007320457A (ja) * | 2006-06-01 | 2007-12-13 | Toyota Motor Corp | オートライト装置 |
| JP2009002111A (ja) * | 2007-06-25 | 2009-01-08 | Tokai Rika Co Ltd | 人体装着型電子キーの人体動作検出式電子キーシステム |
| JP2013115525A (ja) * | 2011-11-28 | 2013-06-10 | Nakayo Telecommun Inc | 車両システムおよび携帯電話端末 |
| JP2016103264A (ja) * | 2014-11-27 | 2016-06-02 | エレクトロビット オートモーティブ ゲーエムベーハー | 自動車の運転手用の装着可能な器械 |
| JP2016200858A (ja) * | 2015-04-07 | 2016-12-01 | ソニー株式会社 | 情報処理装置、情報処理方法、及びプログラム |
| JP2016223995A (ja) * | 2015-06-03 | 2016-12-28 | パイオニア株式会社 | ドライバ推定装置、制御方法、プログラム及び記憶媒体 |
| JP2017024653A (ja) * | 2015-07-27 | 2017-02-02 | トヨタ自動車株式会社 | 乗員情報取得装置及び車両制御システム |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111016782A (zh) * | 2019-12-10 | 2020-04-17 | 上海擎感智能科技有限公司 | 安全驾驶提示系统以及方法 |
| JP7612449B2 (ja) | 2021-02-24 | 2025-01-14 | ダイハツ工業株式会社 | 安全運転支援システム、及びプログラム |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9978278B2 (en) | Vehicle to vehicle communications using ear pieces | |
| JP6976089B2 (ja) | 運転支援装置および運転支援方法 | |
| JP6565859B2 (ja) | 車両制御システム | |
| US10486661B2 (en) | Stop control device | |
| JP5288045B2 (ja) | 車両の緊急退避装置 | |
| CN105073474B (zh) | 针对驾驶员行为的协调的车辆响应系统和方法 | |
| US20180034951A1 (en) | Earpiece with vehicle forced settings | |
| US20170151959A1 (en) | Autonomous vehicle with interactions with wearable devices | |
| JP5397735B2 (ja) | 車両用緊急車両接近検出システム | |
| JP6662080B2 (ja) | ドライバ状態判定装置 | |
| US20170155998A1 (en) | Vehicle with display system for interacting with wearable device | |
| JP2017131445A (ja) | 生体情報計測装置、車載器、及び生体情報計測システム | |
| EP3422946A1 (en) | Vehicle with interactions with wearable device to provide health or physical monitoring | |
| JP2020008931A (ja) | 監視システム | |
| JP7226197B2 (ja) | 車両制御装置 | |
| MX2013009434A (es) | Sistema y método de respuesta al comportamiento del conductor. | |
| JP2016193683A (ja) | 車両制御装置 | |
| JP2020057139A (ja) | 機器制御装置 | |
| JP2013067332A (ja) | 車両用操作入力装置 | |
| JP7073682B2 (ja) | 車載警報装置 | |
| US11897496B2 (en) | Vehicle warning system | |
| JP2020032785A (ja) | 停車支援装置 | |
| JP2017149273A (ja) | 車載装置、車両用システム、及びプログラム | |
| CN110114809B (zh) | 用于在具有变化的输出功能的光信号设备处提醒驾驶员起动的方法和装置 | |
| JP7345007B1 (ja) | 制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180426 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190222 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190402 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20191008 |