JP2017165289A - 車両制御システム、車両制御方法、および車両制御プログラム - Google Patents
車両制御システム、車両制御方法、および車両制御プログラム Download PDFInfo
- Publication number
- JP2017165289A JP2017165289A JP2016052980A JP2016052980A JP2017165289A JP 2017165289 A JP2017165289 A JP 2017165289A JP 2016052980 A JP2016052980 A JP 2016052980A JP 2016052980 A JP2016052980 A JP 2016052980A JP 2017165289 A JP2017165289 A JP 2017165289A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- mode
- automatic driving
- predicted
- timing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images

















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/005—Handover processes
- B60W60/0057—Estimation of the time available or required for the handover
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/20—Conjoint control of vehicle sub-units of different type or different function including control of steering systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/14—Adaptive cruise control
- B60W30/16—Control of distance between vehicles, e.g. keeping a distance to preceding vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/182—Selecting between different operative modes, e.g. comfort and performance modes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/0097—Predicting future conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/082—Selecting or switching between different modes of propelling
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/005—Handover processes
- B60W60/0051—Handover processes from occupants to vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/005—Handover processes
- B60W60/0053—Handover processes from vehicle to occupant
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W2050/0062—Adapting control system settings
- B60W2050/007—Switching between manual and automatic parameter input, and vice versa
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/146—Display means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2400/00—Indexing codes relating to detected, measured or calculated conditions or factors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2420/00—Indexing codes relating to the type of sensors based on the principle of their operation
- B60W2420/40—Photo, light or radio wave sensitive means, e.g. infrared sensors
- B60W2420/403—Image sensing, e.g. optical camera
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/225—Direction of gaze
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2552/00—Input parameters relating to infrastructure
- B60W2552/53—Road markings, e.g. lane marker or crosswalk
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/20—Static objects
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/40—Dynamic objects, e.g. animals, windblown objects
- B60W2554/402—Type
- B60W2554/4029—Pedestrians
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/40—Dynamic objects, e.g. animals, windblown objects
- B60W2554/406—Traffic density
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
- B60W2554/801—Lateral distance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
- B60W2554/802—Longitudinal distance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2556/00—Input parameters relating to data
- B60W2556/40—High definition maps
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2556/00—Input parameters relating to data
- B60W2556/45—External transmission of data to or from the vehicle
- B60W2556/50—External transmission of data to or from the vehicle of positioning data, e.g. GPS [Global Positioning System] data
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/20—Steering systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2720/00—Output or target parameters relating to overall vehicle dynamics
- B60W2720/10—Longitudinal speed
- B60W2720/106—Longitudinal acceleration
Landscapes
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Human Computer Interaction (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Traffic Control Systems (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Remote Sensing (AREA)
- Aviation & Aerospace Engineering (AREA)
- Radar, Positioning & Navigation (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Evolutionary Computation (AREA)
- Game Theory and Decision Science (AREA)
- Medical Informatics (AREA)
- Artificial Intelligence (AREA)
- Health & Medical Sciences (AREA)
- Business, Economics & Management (AREA)
- Navigation (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
Abstract
【解決手段】車両制御システムは、自車両の加減速および操舵のうち少なくとも一方を自動的に制御する自動運転制御部であって、自動運転の度合が異なる複数のモードの何れかで自動運転制御を行う自動運転制御部と、前記自動運転のモードが前記自車両の走行環境に応じて前記複数のモードの何れかに遷移する場合に、前記モードが遷移するタイミングを予測し、予測したタイミングを報知する報知部と、を備える。
【選択図】図2
Description
図1は、実施形態の車両制御システム100が搭載される車両(以下、自車両Mと称する)の構成要素を示す図である。車両制御システム100が搭載される車両は、例えば、二輪や三輪、四輪等の自動車であり、ディーゼルエンジンやガソリンエンジン等の内燃機関を動力源とした自動車や、電動機を動力源とした電気自動車、内燃機関および電動機を兼ね備えたハイブリッド自動車等を含む。電気自動車は、例えば、二次電池、水素燃料電池、金属燃料電池、アルコール燃料電池等の電池により放電される電力を使用して駆動される。
以下、車両制御システム100について説明する。車両制御システム100は、例えば、一以上のプロセッサまたは同等の機能を有するハードウェアにより実現される。車両制御システム100は、CPU(Central Processing Unit)等のプロセッサ、記憶装置、および通信インターフェースが内部バスによって接続されたECU(Electronic Control Unit)、或いはMPU(Micro-Processing Unit)等が組み合わされた構成であってよい。
第1モードは、他のモードと比べて最も自動運転の度合が高いモードである。第1モードが実施されている場合、複雑な合流制御等、全ての車両制御が自動的に行われるため、車両乗員は自車両Mの周辺や状態を監視する必要がない(他のモードと比べて周辺監視義務の度合が低下する)。
第2モードは、第1モードの次に自動運転の度合が高いモードである。第2モードが実施されている場合、原則として全ての車両制御が自動的に行われるが、場面に応じて自車両Mの運転操作が車両乗員に委ねられる。このため、車両乗員は、自車両Mの周辺や状態を監視している必要がある(第1モードと比べて周辺監視義務の度合が増加する)。なお、第2のモードは、第1モードよりも、HMI70の各インターフェース装置(非運転操作系)の操作許容度が低いモードである。
第3モードは、第2モードの次に自動運転の度合が高いモードである。第3モードが実施されている場合、車両乗員は、場面に応じた確認操作をHMI70に対して行う必要がある。第3モードでは、例えば、車線変更のタイミングが車両乗員に通知され、車両乗員がHMI70に対して車線変更を指示する操作を行った場合に、自動的な車線変更が行われる。このため、車両乗員は自車両Mの周辺や状態を監視している必要がある(第2モードと比べて周辺監視義務の度合が増加する)。なお、第3のモードは、第2モードよりも、HMI70の各インターフェース装置(非運転操作系)の操作許容度が低いモードである。
以下、本実施形態に係る車両制御システム100よる処理の流れについて説明する。なお、以下の説明では、車両制御システム100のおける各種処理のうち、主にHMI制御部170により実施される自動運転のモード変更に伴う情報出力に関するHMI制御処理の流れについて説明する。
図16は、HMI制御処理の第1の実施例を示すフローチャートである。図16の例において、HMI制御部170は、自動運転制御部120よりモード情報を取得する(ステップS100)。次に、予測継続時間算出部172は、取得したモード情報に含まれる運転モードが、現在の運転モードから変更されることにより、情報の出力が必要な変更か否かを判定する(ステップS102)。情報の出力が必要な運転モードとは、例えば車両乗員の周辺監視義務の度合が低下する運転モードまたはインターフェース装置の操作許容度が増加する運転モードであり、一例として、第2モードから第1モードへの変更、TJP解除モードからTJPモードへの変更等が相当するが、これに限定されるものではない。
次に、上述したステップS106におけるモードの予測継続時間の算出処理の一例について、フローチャートを用いて説明する。図17は、モードの予測継続時間の算出処理の一例を示すフローチャートである。図17の例において、予測継続時間算出部172は、自車両Mの現在位置から渋滞が解消されると予測される位置までの距離を取得する(ステップS200)。ステップS200の処理では、例えばナビゲーション装置50により車両乗員が設定した目的値までの経路において、GNSS受信機から推定される自車両Mの現在位置と、その経路に関する交通情報から得られる渋滞が解消されると予測される位置との経路上の距離を取得する。渋滞が解消されると予測される位置とは、例えば交通情報に「○○ジャンクションで渋滞」、「△△料金所で渋滞」等の渋滞情報が含まれていれば、その○○ジャンクションや△△料金所の位置であり、この位置情報は、例えば高精度地図情報182から取得することができる。
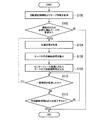
図18は、HMI制御処理の第2の実施例を示すフローチャートである。図18の例において、ステップS300〜S306の処理は、上述した第1の実施例におけるステップS100〜S106の処理と同様であるため、ここでの具体的な説明は省略する。
Claims (12)
- 自車両の加減速および操舵のうち少なくとも一方を自動的に制御する自動運転制御部であって、自動運転の度合が異なる複数のモードの何れかで自動運転制御を行う自動運転制御部と、
前記自動運転のモードが前記自車両の走行環境に応じて前記複数のモードの何れかに遷移する場合に、前記モードが遷移するタイミングを予測し、予測したタイミングを報知する報知部と、
を備える車両制御システム。 - 前記報知部は、
前記自動運転の度合が高い状態から低い状態に遷移するまでの継続時間を予測する、
請求項1に記載の車両制御システム。 - 前記報知部は、
前記自車両の現在の自動運転のモードから、前記自動運転の度合が高い自動運転のモードに変更されるタイミングまでの予測継続時間を報知する、
請求項1または2に記載の車両制御システム。 - 前記報知部は、
前記モードが遷移するタイミングを報知することを、前記自動運転の度合が高い自動運転のモードに変更される前のモードの開始タイミングで開始する、
請求項1から3のうち、何れか1項に記載の車両制御システム。 - 前記報知部は、
前記モードが遷移するタイミングを報知することを、前記自動運転の度合が高い自動運転のモードから前記自動運転の度合が低い自動運転のモードに変更されたタイミングで開始する、
請求項1から4のうち、何れか1項に記載の車両制御システム。 - 前記報知部は、
所定速度以下で前走車に追従して自動運転を行う渋滞追従走行モードの予測継続時間を報知する、
請求項1から5のうち、何れか1項に記載の車両制御システム。 - 前記報知部は、
前記自車両の現在位置と、前記自車両が走行する目的地までの経路に関する交通情報とに基づいて、前記予測継続時間を算出する予測継続時間算出部を備え、
前記予測継続時間算出部により算出された予測継続時間を報知する、
請求項3に記載の車両制御システム。 - 前記予測継続時間算出部は、
一定時間ごとに、前記予測継続時間を算出する、
請求項7に記載の車両制御システム。 - 前記予測継続時間算出部は、
前記自車両の現在位置と、前記交通情報から得られる渋滞が解消されると予測される位置とに基づいて、前記自車両が走行する経路上の距離を算出し、算出した距離と、前記自車両の車速とに基づいて第1の時間を算出するとともに、
前記交通情報から得られる渋滞が解消されると予測される位置から所定の加速度で前記自車両を加速させて所定の速度に至るまでの第2の時間を算出し、
算出した前記第1の時間と前記第2の時間とに基づいて前記予測継続時間を算出する、
請求項7または8に記載の車両制御システム。 - 前記自車両内の乗員の視線方向を検出する視線検出部を更に備え、
前記報知部は、
前記視線検出部により検出された前記自車両の乗員の視線方向にあるインターフェース装置に前記モードが遷移するタイミングを報知する、
請求項1から9のうち、何れか1項に記載の車両制御システム。 - 車載コンピュータが、
自車両の加減速および操舵のうち少なくとも一方を自動的に制御するとともに、自動運転の度合が異なる複数のモードの何れかで自動運転制御を行い、
前記自動運転のモードが前記自車両の走行環境に応じて前記複数のモードの何れかに遷移する場合に、前記モードが遷移するタイミングを予測し、予測したタイミングを報知部に報知させる、
車両制御方法。 - 車載コンピュータに、
自車両の加減速および操舵のうち少なくとも一方を自動的に制御するとともに、自動運転の度合が異なる複数のモードの何れかで自動運転制御を行い、
前記自動運転のモードが前記自車両の走行環境に応じて前記複数のモードの何れかに遷移する場合に、前記モードが遷移するタイミングを予測し、予測したタイミングを報知部に報知させる、
処理を実行させるための車両制御プログラム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016052980A JP6652417B2 (ja) | 2016-03-16 | 2016-03-16 | 車両制御システム、車両制御方法、および車両制御プログラム |
| US15/460,859 US10427686B2 (en) | 2016-03-16 | 2017-03-16 | Vehicle control system, vehicle control method, and vehicle control program |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016052980A JP6652417B2 (ja) | 2016-03-16 | 2016-03-16 | 車両制御システム、車両制御方法、および車両制御プログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017165289A true JP2017165289A (ja) | 2017-09-21 |
| JP6652417B2 JP6652417B2 (ja) | 2020-02-26 |
Family
ID=59855223
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016052980A Active JP6652417B2 (ja) | 2016-03-16 | 2016-03-16 | 車両制御システム、車両制御方法、および車両制御プログラム |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US10427686B2 (ja) |
| JP (1) | JP6652417B2 (ja) |
Cited By (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019156356A (ja) * | 2018-03-16 | 2019-09-19 | 本田技研工業株式会社 | 車両用制御装置及び車両 |
| JP2019159828A (ja) * | 2018-03-13 | 2019-09-19 | 本田技研工業株式会社 | 車両制御装置、車両制御方法、およびプログラム |
| JP2019196154A (ja) * | 2018-05-11 | 2019-11-14 | トヨタ自動車株式会社 | 車両制御システム |
| CN111149142A (zh) * | 2017-09-28 | 2020-05-12 | 株式会社电装 | 控制对象车辆设定装置、控制对象车辆设定系统及控制对象车辆设定方法 |
| JP2020097380A (ja) * | 2018-12-19 | 2020-06-25 | トヨタ自動車株式会社 | 自動運転システム |
| JP2020158008A (ja) * | 2019-03-27 | 2020-10-01 | 株式会社Subaru | 自動運転システム |
| JP2021112936A (ja) * | 2020-01-16 | 2021-08-05 | 本田技研工業株式会社 | 車両及びその制御装置 |
| WO2021199964A1 (ja) * | 2020-03-31 | 2021-10-07 | 株式会社デンソー | 提示制御装置、提示制御プログラム、自動走行制御システムおよび自動走行制御プログラム |
| JP2021160708A (ja) * | 2020-03-31 | 2021-10-11 | 株式会社デンソー | 提示制御装置、提示制御プログラム、自動走行制御システムおよび自動走行制御プログラム |
| JP2021183465A (ja) * | 2020-05-22 | 2021-12-02 | 株式会社デンソー | 運転支援装置、運転支援方法、および運転支援プログラム |
| JP2022000376A (ja) * | 2020-09-23 | 2022-01-04 | 阿波▲羅▼智▲聯▼(北京)科技有限公司 | 自動運転機能制御方法、装置、電子機器及び記憶媒体 |
| WO2022030269A1 (ja) * | 2020-08-07 | 2022-02-10 | 株式会社デンソー | 車両用表示制御装置、車両用表示制御システム、及び車両用表示制御方法 |
| DE102021126348A1 (de) | 2020-10-19 | 2022-04-21 | Toyota Jidosha Kabushiki Kaisha | Benachrichtigungsvorrichtung für einen fahrer |
| WO2022163227A1 (ja) * | 2021-01-27 | 2022-08-04 | 株式会社デンソー | 自動運転制御装置、自動運転制御プログラム、提示制御装置及び提示制御プログラム |
| JP2023033411A (ja) * | 2019-07-05 | 2023-03-10 | 本田技研工業株式会社 | 車両の制御システム、車両の制御方法、およびプログラム |
| JP2023076564A (ja) * | 2020-02-18 | 2023-06-01 | 株式会社デンソー | Hmi制御装置およびhmi制御プログラム |
| JP2023104274A (ja) * | 2022-01-17 | 2023-07-28 | トヨタ自動車株式会社 | 走行経路作成装置、走行経路作成方法、および走行経路作成用コンピュータプログラム |
| JP2023114713A (ja) * | 2022-02-07 | 2023-08-18 | 本田技研工業株式会社 | 車両並びにその制御装置及び制御方法 |
| US20250333071A1 (en) * | 2024-04-28 | 2025-10-30 | GM Global Technology Operations LLC | Determination of an optimal vehicle maneuvering plan in a traffic congestion situation |
Families Citing this family (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10220851B2 (en) * | 2016-12-14 | 2019-03-05 | Ford Global Technologies, Llc | Infrastructure-centric vehicle mode selection |
| JP2019048524A (ja) * | 2017-09-08 | 2019-03-28 | スタンレー電気株式会社 | 車両の前照灯の制御装置 |
| US11580859B1 (en) * | 2017-09-28 | 2023-02-14 | Apple Inc. | Vehicle lane change |
| JP6580115B2 (ja) * | 2017-12-18 | 2019-09-25 | 本田技研工業株式会社 | 自動運転車両の走行制御装置 |
| WO2019131121A1 (ja) * | 2017-12-26 | 2019-07-04 | ソニー株式会社 | 信号処理装置および方法、並びにプログラム |
| US11237554B2 (en) * | 2018-03-08 | 2022-02-01 | Steering Solutions Ip Holding Corporation | Driver readiness assessment system and method for vehicle |
| JP7087623B2 (ja) * | 2018-04-19 | 2022-06-21 | トヨタ自動車株式会社 | 車両の制御装置 |
| DE102018206425B4 (de) * | 2018-04-25 | 2025-03-20 | Bayerische Motoren Werke Aktiengesellschaft | Aktivierung einer Fahrfunktion zum automatisierten Fahren mit Längs- und Querführung über eine andere Fahrfunktion zum automatisierten Fahren mit geringem Automatisierungsgrad |
| JP7055759B2 (ja) * | 2019-01-24 | 2022-04-18 | 本田技研工業株式会社 | 車両制御装置 |
| DE102019209707B4 (de) * | 2019-07-02 | 2022-05-19 | Volkswagen Aktiengesellschaft | Verfahren zum Betrieb eines selbstfahrenden Fahrzeugs |
| JP7078909B2 (ja) * | 2019-12-19 | 2022-06-01 | トヨタ自動車株式会社 | 車両制御装置及び車両制御用コンピュータプログラム |
| US11699205B1 (en) | 2020-05-20 | 2023-07-11 | State Farm Mutual Automobile Insurance Company | Providing a GUI to enable analysis of time-synchronized data sets pertaining to a road segment |
| US11954315B1 (en) * | 2020-11-19 | 2024-04-09 | State Farm Mutual Automobile Insurance Company | Systems and methods for dynamically creating and adjusting scene models |
| CN113183965B (zh) * | 2021-05-06 | 2022-04-22 | 恒大恒驰新能源汽车研究院(上海)有限公司 | 一种驾驶模式的调节方法、装置和系统 |
| EP4342757A1 (en) * | 2022-09-22 | 2024-03-27 | TuSimple, Inc. | Controlling driving modes and operations for autonomous vehicles |
| US20240101121A1 (en) * | 2022-09-22 | 2024-03-28 | Tusimple, Inc. | Controlling driving modes and operations for vehicles |
| US20260116425A1 (en) * | 2024-10-24 | 2026-04-30 | GM Global Technology Operations LLC | Method of planning a lane-level path for a vehicle in the existence of scene uncertainty |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010000949A (ja) * | 2008-06-20 | 2010-01-07 | Toyota Motor Corp | 運転支援装置 |
| JP2013156927A (ja) * | 2012-01-31 | 2013-08-15 | Denso Corp | 注意喚起装置およびプログラム |
| JP2015017944A (ja) * | 2013-07-12 | 2015-01-29 | 株式会社デンソー | 自動運転支援装置 |
| WO2015162764A1 (ja) * | 2014-04-24 | 2015-10-29 | 三菱電機株式会社 | 車載情報機器および車載情報機器の機能制限方法 |
| JP2015230573A (ja) * | 2014-06-05 | 2015-12-21 | アルパイン株式会社 | 車両運転支援装置、方法およびプログラム |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE19743024A1 (de) * | 1997-09-29 | 1999-04-08 | Daimler Chrysler Ag | Kraftfahrzeug mit autonomer Fahrzeugführung und elektronischen Kommunikationsmitteln |
| DE102005050277A1 (de) * | 2005-10-20 | 2007-04-26 | Robert Bosch Gmbh | Abstands- und Geschwindigkeitsregler mit Stauerkennung |
| US7606662B2 (en) * | 2006-07-31 | 2009-10-20 | Nissan Technical Center North America, Inc. | Traffic navigation system |
| DE102013012777A1 (de) * | 2013-07-31 | 2015-02-05 | Valeo Schalter Und Sensoren Gmbh | Verfahren zum Nutzen eines Kommunikationsendgeräts in einm Kraftfahrzeug beim aktivierten Autopiloten und Kraftfahrzeug |
| JP6349833B2 (ja) | 2014-03-25 | 2018-07-04 | 日産自動車株式会社 | 情報表示装置 |
| US10067561B2 (en) * | 2014-09-22 | 2018-09-04 | Facebook, Inc. | Display visibility based on eye convergence |
| US10579055B2 (en) * | 2014-12-29 | 2020-03-03 | Robert Bosch Gmbh | Drive state indicator for an autonomous vehicle |
-
2016
- 2016-03-16 JP JP2016052980A patent/JP6652417B2/ja active Active
-
2017
- 2017-03-16 US US15/460,859 patent/US10427686B2/en active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010000949A (ja) * | 2008-06-20 | 2010-01-07 | Toyota Motor Corp | 運転支援装置 |
| JP2013156927A (ja) * | 2012-01-31 | 2013-08-15 | Denso Corp | 注意喚起装置およびプログラム |
| JP2015017944A (ja) * | 2013-07-12 | 2015-01-29 | 株式会社デンソー | 自動運転支援装置 |
| WO2015162764A1 (ja) * | 2014-04-24 | 2015-10-29 | 三菱電機株式会社 | 車載情報機器および車載情報機器の機能制限方法 |
| JP2015230573A (ja) * | 2014-06-05 | 2015-12-21 | アルパイン株式会社 | 車両運転支援装置、方法およびプログラム |
Cited By (48)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111149142A (zh) * | 2017-09-28 | 2020-05-12 | 株式会社电装 | 控制对象车辆设定装置、控制对象车辆设定系统及控制对象车辆设定方法 |
| JP2019159828A (ja) * | 2018-03-13 | 2019-09-19 | 本田技研工業株式会社 | 車両制御装置、車両制御方法、およびプログラム |
| JP7071173B2 (ja) | 2018-03-13 | 2022-05-18 | 本田技研工業株式会社 | 車両制御装置、車両制御方法、およびプログラム |
| JP7055043B2 (ja) | 2018-03-16 | 2022-04-15 | 本田技研工業株式会社 | 車両用制御装置及び車両 |
| CN110281931A (zh) * | 2018-03-16 | 2019-09-27 | 本田技研工业株式会社 | 车辆用控制装置以及车辆 |
| JP2019156356A (ja) * | 2018-03-16 | 2019-09-19 | 本田技研工業株式会社 | 車両用制御装置及び車両 |
| CN110281931B (zh) * | 2018-03-16 | 2022-07-26 | 本田技研工业株式会社 | 车辆用控制装置以及车辆 |
| JP2019196154A (ja) * | 2018-05-11 | 2019-11-14 | トヨタ自動車株式会社 | 車両制御システム |
| JP2020097380A (ja) * | 2018-12-19 | 2020-06-25 | トヨタ自動車株式会社 | 自動運転システム |
| US12197212B2 (en) | 2018-12-19 | 2025-01-14 | Toyota Jidosha Kabushiki Kaisha | Automatic driving system |
| JP2021181308A (ja) * | 2018-12-19 | 2021-11-25 | トヨタ自動車株式会社 | 自動運転システム |
| JP2023067917A (ja) * | 2018-12-19 | 2023-05-16 | トヨタ自動車株式会社 | 自動運転システム |
| JP7287419B2 (ja) | 2018-12-19 | 2023-06-06 | トヨタ自動車株式会社 | 自動運転システム |
| JP7293635B2 (ja) | 2018-12-19 | 2023-06-20 | トヨタ自動車株式会社 | 自動運転システム |
| JP2020158008A (ja) * | 2019-03-27 | 2020-10-01 | 株式会社Subaru | 自動運転システム |
| JP7288326B2 (ja) | 2019-03-27 | 2023-06-07 | 株式会社Subaru | 自動運転システム |
| US11858527B2 (en) | 2019-07-05 | 2024-01-02 | Honda Motor Co., Ltd. | Control system for vehicle and control method for vehicle |
| US12060073B2 (en) | 2019-07-05 | 2024-08-13 | Honda Motor Co., Ltd. | Control system for vehicle and control method for vehicle |
| JP7445028B2 (ja) | 2019-07-05 | 2024-03-06 | 本田技研工業株式会社 | 車両の制御システム、車両の制御方法、およびプログラム |
| JP2023033411A (ja) * | 2019-07-05 | 2023-03-10 | 本田技研工業株式会社 | 車両の制御システム、車両の制御方法、およびプログラム |
| JP2021112936A (ja) * | 2020-01-16 | 2021-08-05 | 本田技研工業株式会社 | 車両及びその制御装置 |
| US11654955B2 (en) | 2020-01-16 | 2023-05-23 | Honda Motor Co., Ltd. | Vehicle and control apparatus of vehicle |
| JP2023076564A (ja) * | 2020-02-18 | 2023-06-01 | 株式会社デンソー | Hmi制御装置およびhmi制御プログラム |
| JP7494974B2 (ja) | 2020-02-18 | 2024-06-04 | 株式会社デンソー | Hmi制御装置およびhmi制御プログラム |
| US12409846B2 (en) | 2020-02-18 | 2025-09-09 | Denso Corporation | Driving control device and HMI control device |
| JP7363833B2 (ja) | 2020-03-31 | 2023-10-18 | 株式会社デンソー | 提示制御装置、提示制御プログラム、自動走行制御システムおよび自動走行制御プログラム |
| JP2021160708A (ja) * | 2020-03-31 | 2021-10-11 | 株式会社デンソー | 提示制御装置、提示制御プログラム、自動走行制御システムおよび自動走行制御プログラム |
| WO2021199964A1 (ja) * | 2020-03-31 | 2021-10-07 | 株式会社デンソー | 提示制御装置、提示制御プログラム、自動走行制御システムおよび自動走行制御プログラム |
| JP2021183465A (ja) * | 2020-05-22 | 2021-12-02 | 株式会社デンソー | 運転支援装置、運転支援方法、および運転支援プログラム |
| JP7380418B2 (ja) | 2020-05-22 | 2023-11-15 | 株式会社デンソー | 運転支援装置および運転支援プログラム |
| WO2022030269A1 (ja) * | 2020-08-07 | 2022-02-10 | 株式会社デンソー | 車両用表示制御装置、車両用表示制御システム、及び車両用表示制御方法 |
| JP7363710B2 (ja) | 2020-08-07 | 2023-10-18 | 株式会社デンソー | 車両用表示制御装置、車両用表示制御システム、及び車両用表示制御方法 |
| US12533953B2 (en) | 2020-08-07 | 2026-01-27 | Denso Corporation | Vehicle display control device, vehicle display control system, and vehicle display control method |
| JP2022030768A (ja) * | 2020-08-07 | 2022-02-18 | 株式会社デンソー | 車両用表示制御装置、車両用表示制御システム、及び車両用表示制御方法 |
| JP7292338B2 (ja) | 2020-09-23 | 2023-06-16 | 阿波▲羅▼智▲聯▼(北京)科技有限公司 | 自動運転機能制御方法、装置、電子機器及び記憶媒体 |
| JP2022000376A (ja) * | 2020-09-23 | 2022-01-04 | 阿波▲羅▼智▲聯▼(北京)科技有限公司 | 自動運転機能制御方法、装置、電子機器及び記憶媒体 |
| DE102021126348A1 (de) | 2020-10-19 | 2022-04-21 | Toyota Jidosha Kabushiki Kaisha | Benachrichtigungsvorrichtung für einen fahrer |
| US12039865B2 (en) | 2020-10-19 | 2024-07-16 | Toyota Jidosha Kabushiki Kaisha | Notification device to driver |
| JP2022115055A (ja) * | 2021-01-27 | 2022-08-08 | 株式会社デンソー | 自動運転制御装置、自動運転制御プログラム、提示制御装置及び提示制御プログラム |
| WO2022163227A1 (ja) * | 2021-01-27 | 2022-08-04 | 株式会社デンソー | 自動運転制御装置、自動運転制御プログラム、提示制御装置及び提示制御プログラム |
| JP7537403B2 (ja) | 2021-01-27 | 2024-08-21 | 株式会社デンソー | 自動運転制御装置及び自動運転制御プログラム |
| JP7722529B2 (ja) | 2021-01-27 | 2025-08-13 | 株式会社デンソー | 自動運転制御装置及び自動運転制御プログラム |
| JP2024129070A (ja) * | 2021-01-27 | 2024-09-26 | 株式会社デンソー | 自動運転制御装置及び自動運転制御プログラム |
| JP2023104274A (ja) * | 2022-01-17 | 2023-07-28 | トヨタ自動車株式会社 | 走行経路作成装置、走行経路作成方法、および走行経路作成用コンピュータプログラム |
| JP7556365B2 (ja) | 2022-01-17 | 2024-09-26 | トヨタ自動車株式会社 | 走行経路作成装置、走行経路作成方法、および走行経路作成用コンピュータプログラム |
| JP7372367B2 (ja) | 2022-02-07 | 2023-10-31 | 本田技研工業株式会社 | 車両並びにその制御装置及び制御方法 |
| JP2023114713A (ja) * | 2022-02-07 | 2023-08-18 | 本田技研工業株式会社 | 車両並びにその制御装置及び制御方法 |
| US20250333071A1 (en) * | 2024-04-28 | 2025-10-30 | GM Global Technology Operations LLC | Determination of an optimal vehicle maneuvering plan in a traffic congestion situation |
Also Published As
| Publication number | Publication date |
|---|---|
| US10427686B2 (en) | 2019-10-01 |
| JP6652417B2 (ja) | 2020-02-26 |
| US20170267238A1 (en) | 2017-09-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6652417B2 (ja) | 車両制御システム、車両制御方法、および車両制御プログラム | |
| US11267484B2 (en) | Vehicle control system, vehicle control method, and vehicle control program | |
| US10676101B2 (en) | Vehicle control system, vehicle control method, and vehicle control program | |
| JP6337382B2 (ja) | 車両制御システム、交通情報共有システム、車両制御方法、および車両制御プログラム | |
| JP6745334B2 (ja) | 車両制御システム、車両制御方法、および車両制御プログラム | |
| JP6390035B2 (ja) | 車両制御システム、車両制御方法、および車両制御プログラム | |
| JP6375568B2 (ja) | 車両制御システム、車両制御方法、および車両制御プログラム | |
| CN108701414B (zh) | 车辆控制装置、车辆控制方法及存储介质 | |
| CN108883776B (zh) | 车辆控制系统、车辆控制方法及存储介质 | |
| CN108883775B (zh) | 车辆控制系统、车辆控制方法及存储介质 | |
| US20190071075A1 (en) | Vehicle control system, vehicle control method, and vehicle control program | |
| JPWO2017183077A1 (ja) | 車両制御システム、車両制御方法、および車両制御プログラム | |
| JP2017191562A (ja) | 車両制御システム、車両制御方法、および車両制御プログラム | |
| JPWO2017187622A1 (ja) | 車両制御システム、車両制御方法、および車両制御プログラム | |
| JP2017197150A (ja) | 車両制御システム、車両制御方法、および車両制御プログラム | |
| JP2017197151A (ja) | 車両制御システム、車両制御方法、および車両制御プログラム | |
| JP6572506B2 (ja) | 車両制御システム | |
| JP2017165157A (ja) | 車両制御システム、車両制御方法、および車両制御プログラム | |
| JPWO2017179209A1 (ja) | 車両制御システム、車両制御方法、および車両制御プログラム | |
| US20210197845A1 (en) | Vehicle control system, vehicle control method, and vehicle control program | |
| JP2017207964A (ja) | 車両制御システム、車両制御方法、および車両制御プログラム | |
| JP2017191551A (ja) | 車両制御システム、車両制御方法、および車両制御プログラム | |
| JP2017226253A (ja) | 車両制御システム、車両制御方法、および車両制御プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170126 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170815 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20171016 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20180116 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180413 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20180420 |
|
| A912 | Re-examination (zenchi) completed and case transferred to appeal board |
Free format text: JAPANESE INTERMEDIATE CODE: A912 Effective date: 20180518 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190325 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190906 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200123 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6652417 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |