JP2017191551A - 車両制御システム、車両制御方法、および車両制御プログラム - Google Patents
車両制御システム、車両制御方法、および車両制御プログラム Download PDFInfo
- Publication number
- JP2017191551A JP2017191551A JP2016081997A JP2016081997A JP2017191551A JP 2017191551 A JP2017191551 A JP 2017191551A JP 2016081997 A JP2016081997 A JP 2016081997A JP 2016081997 A JP2016081997 A JP 2016081997A JP 2017191551 A JP2017191551 A JP 2017191551A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- automatic driving
- unit
- detection
- control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images

















Landscapes
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Traffic Control Systems (AREA)
Abstract
【解決手段】自車両の周辺を走行する他車両の位置および状態を検知する検知部と、前記検知部の検知結果に基づいて、速度制御と操舵制御とのうち少なくとも一方を自動的に行う自動運転を実行する自動運転制御部と、他車両と通信する通信部と、前記検知部の検知性能に関する情報を、前記通信部を用いて他車両に送信する通信制御部と、を備える車両制御システム。
【選択図】図2
Description
<第1の実施形態>
図1は、各実施形態の車両制御システム100が搭載される車両(以下、自車両Mと称する)の構成要素を示す図である。車両制御システム100が搭載される車両は、例えば、二輪や三輪、四輪等の自動車であり、ディーゼルエンジンやガソリンエンジン等の内燃機関を動力源とした自動車や、電動機を動力源とした電気自動車、内燃機関および電動機を兼ね備えたハイブリッド自動車等を含む。電気自動車は、例えば、二次電池、水素燃料電池、金属燃料電池、アルコール燃料電池等の電池により放電される電力を使用して駆動される。
以下、車両制御システム100について説明する。車両制御システム100は、例えば、一以上のプロセッサまたは同等の機能を有するハードウェアにより実現される。車両制御システム100は、CPU(Central Processing Unit)などのプロセッサ、記憶装置、および通信インターフェースが内部バスによって接続されたECU(Electronic Control Unit)、或いはMPU(Micro-Processing Unit)などが組み合わされた構成であってよい。
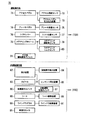
[モードA]
モードAは、最も自動運転の度合が高いモードである。モードAが実施されている場合、複雑な合流制御など、全ての車両制御が自動的に行われるため、車両乗員は自車両Mの周辺や状態を監視する必要が無い。
[モードB]
モードBは、モードAの次に自動運転の度合が高いモードである。モードBが実施されている場合、原則として全ての車両制御が自動的に行われるが、場面に応じて自車両Mの運転操作が車両乗員に委ねられる。このため、車両乗員は自車両Mの周辺や状態を監視している必要がある。
[モードC]
モードCは、モードBの次に自動運転の度合が高いモードである。モードCが実施されている場合、車両乗員は、場面に応じた確認操作をHMI70に対して行う必要がある。モードCでは、例えば、車線変更のタイミングが車両乗員に通知され、車両乗員がHMI70に対して車線変更を指示する操作を行った場合に、自動的な車線変更が行われる。このため、車両乗員は自車両Mの周辺や状態を監視している必要がある。
以下、通信装置55を用いた車両制御について説明する。通信装置55は、DSRCなどを用いて、少なくとも周辺車両(他車両)と通信する。各実施形態の車両制御システム100において、通信制御部155は、自動運転制御部120が検知部(検知デバイスDDおよび外界認識部142)の検知結果に基づいて自動運転を実行する際に、検知部の検知性能に関する情報を、通信装置55を用いて周辺車両に送信する。
<第2の実施形態>
以下、第2の実施形態について説明する。第2の実施形態において、通信制御部155は、自動運転制御部120が検知部(検知デバイスDDおよび外界認識部142)の検知結果に基づいて自動運転を実行する際に、検知部の検知性能に関する情報と、行動計画に関する情報とを、通信装置55を用いて周辺車両に送信する。
以下、第3の実施形態について説明する。第3の実施形態において、通信制御部155は、自動運転制御部120が検知部(検知デバイスDDおよび外界認識部142)の検知結果に基づいて自動運転を実行する際に、検知部の検知性能に関する情報と、行動計画に関する情報とを、通信装置55を用いて周辺車両に送信する。
Claims (9)
- 自車両の周辺を走行する他車両の位置および状態を検知する検知部と、
前記検知部の検知結果に基づいて、速度制御と操舵制御とのうち少なくとも一方を自動的に行う自動運転を実行する自動運転制御部と、
他車両と通信する通信部と、
前記検知部の検知性能に関する情報を、前記通信部を用いて他車両に送信する通信制御部と、
を備える車両制御システム。 - 前記通信部は、更に、他車両から、前記他車両の検知性能に関する情報を受信し、
前記自動運転制御部は、前記通信部により受信された、前記他車両の検知性能に関する情報に基づいて、前記自動運転における計画の内容を変更する、
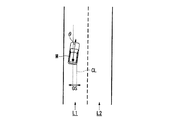
請求項1記載の車両制御システム。 - 前記自動運転制御部は、前記検知部の検知結果に基づいて、自車両が前記他車両を追い抜く計画をたてている場合において、前記通信部により、前記他車両の検知性能が基準よりも低いことを示す情報が受信された場合、前記自車両が前記他車両を追い抜く際の速度を低下させる、
請求項2記載の車両制御システム。 - 前記通信部は、更に、他車両から、前記他車両の自動運転における計画の内容を受信し、
前記自動運転制御部は、前記通信部により受信された、前記他車両の自動運転における計画に基づいて、前記自動運転における計画の内容を変更する、
請求項1記載の車両制御システム。 - 前記通信部は、更に、他車両から、前記他車両の検知性能に関する情報を受信し、
前記自動運転制御部は、前記通信部により、前記自車両の後方を走行する前記他車両が、前記自車両の走行車線から隣接車線に車線変更する計画をたてていることを示す情報が受信され、且つ前記他車両の速度が前記自車両の速度よりも速い場合、前記自車両の速度を低下させる、
請求項4記載の車両制御システム。 - 前記自動運転制御部は、前記通信部により受信された情報に基づいて、前記他車両が自動運転を行う車両であるか否かを確認すると共に、前記他車両が自動運転を行う車両であることが確認された場合に、前記自車両と前記他車両のいずれが計画を変更するかを判定する、
請求項1から5のうちいずれか1項記載の車両制御システム。 - 自車両の周辺を走行する他車両の位置および状態を検知する検知部と、
前記検知部の検知結果に基づいて、速度制御と操舵制御とのうち少なくとも一方を自動的に行う自動運転を実行する自動運転制御部と、
他車両から、前記他車両の検知性能に関する情報を受信する通信部と、を備え、
前記自動運転制御部は、前記通信部により受信された、前記他車両の検知性能に関する情報に基づいて、前記自動運転における計画の内容を変更する、
車両制御システム。 - 車載コンピュータが、
自車両の周辺を走行する他車両の位置および状態を検知する検知部の検知結果に基づいて、速度制御と操舵制御とのうち少なくとも一方を自動的に行う自動運転を実行し、
前記検知部の検知性能に関する情報を、少なくとも他車両と通信する通信部を用いて他車両に送信する、
車両制御方法。 - 車載コンピュータに、
自車両の周辺を走行する他車両の位置および状態を検知する検知部の検知結果に基づいて、速度制御と操舵制御とのうち少なくとも一方を自動的に行う自動運転を実行させ、
前記検知部の検知性能に関する情報を、少なくとも他車両と通信する通信部を用いて他車両に送信させる、
車両制御プログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016081997A JP6650331B2 (ja) | 2016-04-15 | 2016-04-15 | 車両制御システム、車両制御方法、および車両制御プログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016081997A JP6650331B2 (ja) | 2016-04-15 | 2016-04-15 | 車両制御システム、車両制御方法、および車両制御プログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017191551A true JP2017191551A (ja) | 2017-10-19 |
| JP6650331B2 JP6650331B2 (ja) | 2020-02-19 |
Family
ID=60085222
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016081997A Expired - Fee Related JP6650331B2 (ja) | 2016-04-15 | 2016-04-15 | 車両制御システム、車両制御方法、および車両制御プログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6650331B2 (ja) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20190202297A1 (en) * | 2018-01-04 | 2019-07-04 | Honda Motor Co., Ltd. | Control apparatus and control method |
| WO2019131121A1 (ja) * | 2017-12-26 | 2019-07-04 | ソニー株式会社 | 信号処理装置および方法、並びにプログラム |
| CN111674392A (zh) * | 2019-03-11 | 2020-09-18 | Swm株式会社 | 自动驾驶汽车的行驶控制方法 |
| KR20200144319A (ko) * | 2019-06-18 | 2020-12-29 | 현대모비스 주식회사 | 차량 충돌방지 장치 및 방법 |
| CN112805201A (zh) * | 2018-10-09 | 2021-05-14 | 日立安斯泰莫株式会社 | 车辆控制系统 |
| JP2021095078A (ja) * | 2019-12-19 | 2021-06-24 | トヨタ自動車株式会社 | 車線変更決定装置 |
| JP2021103484A (ja) * | 2019-12-25 | 2021-07-15 | 株式会社デンソー | 車両用制御システムおよび車両制御装置 |
| CN113785337A (zh) * | 2019-04-29 | 2021-12-10 | 大众汽车(中国)投资有限公司 | 车辆控制设备和车辆控制系统 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015186648A1 (ja) * | 2014-06-06 | 2015-12-10 | 日立オートモティブシステムズ株式会社 | 車両の走行制御装置 |
| JP2015230665A (ja) * | 2014-06-06 | 2015-12-21 | 日立オートモティブシステムズ株式会社 | 障害物情報管理装置 |
| JP2017037463A (ja) * | 2015-08-10 | 2017-02-16 | 株式会社デンソー | 情報伝達装置、電子制御装置、情報送信装置、及び電子制御システム |
-
2016
- 2016-04-15 JP JP2016081997A patent/JP6650331B2/ja not_active Expired - Fee Related
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015186648A1 (ja) * | 2014-06-06 | 2015-12-10 | 日立オートモティブシステムズ株式会社 | 車両の走行制御装置 |
| JP2015230665A (ja) * | 2014-06-06 | 2015-12-21 | 日立オートモティブシステムズ株式会社 | 障害物情報管理装置 |
| JP2017037463A (ja) * | 2015-08-10 | 2017-02-16 | 株式会社デンソー | 情報伝達装置、電子制御装置、情報送信装置、及び電子制御システム |
Cited By (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019131121A1 (ja) * | 2017-12-26 | 2019-07-04 | ソニー株式会社 | 信号処理装置および方法、並びにプログラム |
| CN111566710A (zh) * | 2017-12-26 | 2020-08-21 | 索尼公司 | 信号处理装置和方法以及程序 |
| US11511735B2 (en) | 2017-12-26 | 2022-11-29 | Sony Corporation | Signal processing apparatus and signal processing method |
| CN110027542A (zh) * | 2018-01-04 | 2019-07-19 | 本田技研工业株式会社 | 控制装置以及控制方法 |
| JP2019119341A (ja) * | 2018-01-04 | 2019-07-22 | 本田技研工業株式会社 | 制御装置及び制御方法 |
| US10836263B2 (en) * | 2018-01-04 | 2020-11-17 | Honda Motor Co., Ltd. | Control apparatus and control method |
| US20190202297A1 (en) * | 2018-01-04 | 2019-07-04 | Honda Motor Co., Ltd. | Control apparatus and control method |
| CN112805201A (zh) * | 2018-10-09 | 2021-05-14 | 日立安斯泰莫株式会社 | 车辆控制系统 |
| CN111674392A (zh) * | 2019-03-11 | 2020-09-18 | Swm株式会社 | 自动驾驶汽车的行驶控制方法 |
| CN113785337A (zh) * | 2019-04-29 | 2021-12-10 | 大众汽车(中国)投资有限公司 | 车辆控制设备和车辆控制系统 |
| US12175868B2 (en) | 2019-04-29 | 2024-12-24 | Volkswagen Aktiengesellschaft | Vehicle control device and vehicle control system |
| KR20200144319A (ko) * | 2019-06-18 | 2020-12-29 | 현대모비스 주식회사 | 차량 충돌방지 장치 및 방법 |
| KR20220027902A (ko) * | 2019-06-18 | 2022-03-08 | 현대모비스 주식회사 | 차량 충돌방지 장치 및 방법 |
| KR102763947B1 (ko) * | 2019-06-18 | 2025-02-07 | 현대모비스 주식회사 | 차량 충돌방지 장치 및 방법 |
| KR102763948B1 (ko) * | 2019-06-18 | 2025-02-10 | 현대모비스 주식회사 | 차량 충돌방지 장치 및 방법 |
| KR102669425B1 (ko) * | 2019-06-18 | 2024-05-29 | 현대모비스 주식회사 | 차량 충돌방지 장치 및 방법 |
| KR20240075784A (ko) * | 2019-06-18 | 2024-05-29 | 현대모비스 주식회사 | 차량 충돌방지 장치 및 방법 |
| US12060058B2 (en) | 2019-06-18 | 2024-08-13 | Hyundai Mobis Co., Ltd. | Apparatus and method for preventing vehicle collision |
| JP2021095078A (ja) * | 2019-12-19 | 2021-06-24 | トヨタ自動車株式会社 | 車線変更決定装置 |
| JP7276112B2 (ja) | 2019-12-19 | 2023-05-18 | トヨタ自動車株式会社 | 車線変更決定装置 |
| JP2021103484A (ja) * | 2019-12-25 | 2021-07-15 | 株式会社デンソー | 車両用制御システムおよび車両制御装置 |
| JP7310597B2 (ja) | 2019-12-25 | 2023-07-19 | 株式会社デンソー | 車両用制御システムおよび車両制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6650331B2 (ja) | 2020-02-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6337382B2 (ja) | 車両制御システム、交通情報共有システム、車両制御方法、および車両制御プログラム | |
| JP6387548B2 (ja) | 車両制御システム、車両制御方法、および車両制御プログラム | |
| JP6275187B2 (ja) | 車両制御システム、車両制御方法、および車両制御プログラム | |
| JP6745334B2 (ja) | 車両制御システム、車両制御方法、および車両制御プログラム | |
| JP6291680B2 (ja) | 車両制御システム、車両制御方法、および車両制御プログラム | |
| JP6544878B2 (ja) | 車両制御システム、車両制御方法、および車両制御プログラム | |
| JP6692898B2 (ja) | 車両制御システム、車両制御方法、および車両制御プログラム | |
| JP6623468B2 (ja) | 車両制御装置、車両制御方法、および車両制御プログラム | |
| JP6692899B2 (ja) | 車両制御システム、車両制御方法、および車両制御プログラム | |
| JP6450980B2 (ja) | 車両制御システム、車両制御方法、および車両制御プログラム | |
| JPWO2017179193A1 (ja) | 車両制御システム、車両制御方法、および車両制御プログラム | |
| JP6582339B2 (ja) | 車両制御システム、車両制御方法、および車両制御プログラム | |
| JPWO2017168517A1 (ja) | 車両制御システム、車両制御方法、および車両制御プログラム | |
| JP2017207984A (ja) | 交通状況推定装置、車両制御システム、経路誘導装置、交通状況推定方法、および交通状況推定プログラム | |
| JP6650331B2 (ja) | 車両制御システム、車両制御方法、および車両制御プログラム | |
| JPWO2017158768A1 (ja) | 車両制御システム、車両制御方法、および車両制御プログラム | |
| JP2017211700A (ja) | 車両制御システム、車両制御方法、および車両制御プログラム | |
| JP6572506B2 (ja) | 車両制御システム | |
| JP2017165289A (ja) | 車両制御システム、車両制御方法、および車両制御プログラム | |
| JPWO2017168738A1 (ja) | 車両制御システム、車両制御方法、および車両制御プログラム | |
| JP2017214035A (ja) | 車両制御システム、車両制御方法、および車両制御プログラム | |
| JPWO2017158764A1 (ja) | 車両制御システム、車両制御方法、および車両制御プログラム | |
| JP2017199317A (ja) | 車両制御システム、車両制御方法、および車両制御プログラム | |
| JP2017207964A (ja) | 車両制御システム、車両制御方法、および車両制御プログラム | |
| JP2017226253A (ja) | 車両制御システム、車両制御方法、および車両制御プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20181005 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20181127 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20191010 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20191023 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191203 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200107 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200120 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6650331 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |