JP2017165296A - 自動運転制御システム - Google Patents
自動運転制御システム Download PDFInfo
- Publication number
- JP2017165296A JP2017165296A JP2016053210A JP2016053210A JP2017165296A JP 2017165296 A JP2017165296 A JP 2017165296A JP 2016053210 A JP2016053210 A JP 2016053210A JP 2016053210 A JP2016053210 A JP 2016053210A JP 2017165296 A JP2017165296 A JP 2017165296A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- sensor
- driving
- information
- automatic driving
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images



Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/166—Anti-collision systems for active traffic, e.g. moving vehicles, pedestrians, bikes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/02—Ensuring safety in case of control system failures, e.g. by diagnosing, circumventing or fixing failures
- B60W50/029—Adapting to failures or work around with other constraints, e.g. circumvention by avoiding use of failed parts
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/005—Handover processes
- B60W60/0053—Handover processes from vehicle to occupant
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/005—Handover processes
- B60W60/0059—Estimation of the risk associated with autonomous or manual driving, e.g. situation too complex, sensor failure or driver incapacity
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/161—Decentralised systems, e.g. inter-vehicle communication
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/08—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to drivers or passengers
- B60W2040/0818—Inactivity or incapacity of driver
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W2050/0062—Adapting control system settings
- B60W2050/007—Switching between manual and automatic parameter input, and vice versa
- B60W2050/0072—Controller asks driver to take over
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/02—Ensuring safety in case of control system failures, e.g. by diagnosing, circumventing or fixing failures
- B60W50/0205—Diagnosing or detecting failures; Failure detection models
- B60W2050/0215—Sensor drifts or sensor failures
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2420/00—Indexing codes relating to the type of sensors based on the principle of their operation
- B60W2420/40—Photo, light or radio wave sensitive means, e.g. infrared sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2420/00—Indexing codes relating to the type of sensors based on the principle of their operation
- B60W2420/40—Photo, light or radio wave sensitive means, e.g. infrared sensors
- B60W2420/403—Image sensing, e.g. optical camera
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2420/00—Indexing codes relating to the type of sensors based on the principle of their operation
- B60W2420/40—Photo, light or radio wave sensitive means, e.g. infrared sensors
- B60W2420/408—Radar; Laser, e.g. lidar
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/22—Psychological state; Stress level or workload
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/26—Incapacity
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
- B60W2554/802—Longitudinal distance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2754/00—Output or target parameters relating to objects
- B60W2754/10—Spatial relation or speed relative to objects
- B60W2754/30—Longitudinal distance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2756/00—Output or target parameters relating to data
- B60W2756/10—Involving external transmission of data to or from the vehicle
Landscapes
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Human Computer Interaction (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Traffic Control Systems (AREA)
Abstract
Description
また、道路情報は前記管理センタから通信によって車両に提供されても良い。
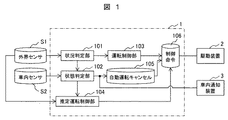
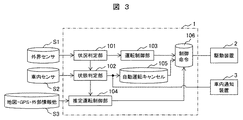
S1:外界センサ
S2:車内センサ
S3:通信装置
1:電子制御装置
2:駆動装置
3:車内通知装置
101:状況判定部
103:運転制御部
102:状態判定部
104:推定運転制御部
105、106:メモリ手段
Claims (18)
- 複数の機能の組み合わせによって車両の自動走行を実現するとともに、前記複数の機能のそれぞれの機能は、前記車両に搭載された複数のセンサからの情報を用いて実現されている自動運転システムであって、
前記センサのうち、車両外部の状況を検知する外界センサを用いて走行中に車両周辺の状況を認識して自動走行が可能であるかを判定する状況判定部と、
自動走行が可能である場合に車両の走行制御を行う運転制御部と、
前記センサのうち、車両内部の状況を検知する社内センサを用いて搭乗者の状態から搭乗者が運転可能であるかを判定する状態判定部と、
自動走行が困難であり、かつ搭乗者が運転を引き継ぐことが困難な場合に、自動走行の前記機能を実施することが困難であると判断する原因が、当該機能に情報を提供する第1のセンサであるとき、第1のセンサ以外の第2のセンサの情報を用いて、前記当該機能を代替実施し、車両の走行制御を行う推定運転制御部を有し、
搭乗者が運転を引き継ぐことが可能になるまでの間、前記推定運転制御部の制御命令に基づいて自動走行を継続することを特徴とする自動運転制御システム。 - 請求項1に記載の自動運転制御システムであって、
前記車両は、通信装置を介して情報を取得し、前記第2のセンサの情報として、前記通信装置を介して得た情報を用いることを特徴とする自動運転制御システム。 - 請求項1または請求項2に記載の自動運転制御システムであって、
前記車両の運転状態に応じて制御内容を変更するとともに、制御内容ごとに前記第2のセンサが変更、選択されて車両の走行制御を行うことを特徴とする自動運転制御システム。 - 請求項1から請求項3のいずれか1項に記載の自動運転制御システムであって、
前記推定運転制御部は、外界センサや、リアカメラ、アラウンドビューカメラ、近距離赤外線センサ、地図、GPS位置情報、速度、加速度などの車両が有する情報を用いて制御を行うことを特徴とする自動運転制御システム。 - 請求項1から請求項4のいずれか1項に記載の自動運転制御システムであって、
前記推定運転制御部は、車両間通信や路車間通信によって得られる情報と、車両が有する情報を組み合わせて制御を行うことを特徴とする自動運転制御システム。 - 請求項5に記載の自動運転制御システムであって、
前記車両間通信や路車間通信によって得られる情報とは、自車以外によって撮影された自車周辺の画像や、道路の混雑状況、路面状況、自車両と他車両の位置、車両間通信を行っている車両の速度や加速度、車両間通信を行っている車両の次の右左折の箇所、他車両の自動走行の有無、周辺他車両の右左折箇所などであることを特徴とする自動運転制御システム。 - 請求項1から請求項6のいずれか1項に記載の自動運転制御システムであって、
搭乗者に警告を行うための車内通知装置を有し、前記推定運転制御部の制御命令に基づいて自動走行を行っている間、前記状態判定部による搭乗者の運転可能状態の判定を実施し続け、運転可能状態となるまでの間、車内通知装置による搭乗者への警告を行うことを特徴とする請求項1の自動運転制御システム。 - 複数の機能の組み合わせによって車両の自動走行を実現するとともに、前記複数の機能のそれぞれの機能は、前記車両に搭載された複数のセンサからの情報を用いて実現されている自動運転方法であって、
前記センサのうち、車両外部の状況を検知する外界センサを用いて走行中に車両周辺の状況を認識して自動走行が可能であるかを判定し、
自動走行が可能である場合に車両の走行制御を行い、
前記センサのうち、車両内部の状況を検知する社内センサを用いて搭乗者の状態から搭乗者が運転可能であるかを判定し、
自動走行が困難であり、かつ搭乗者が運転を引き継ぐことが困難な場合に、自動走行の前記機能を実施することが困難であると判断する原因が、当該機能に情報を提供する第1のセンサであるとき、第1のセンサ以外の第2のセンサの情報を用いて、前記当該機能を代替実施して車両の走行制御を行い、
搭乗者が運転を引き継ぐことが可能になるまでの間、前記車両の走行制御の命令に基づいて自動走行を継続することを特徴とする自動運転制御方法。 - 複数の機能の組み合わせによって車両の自動走行を実現するとともに、前記機能は、前記車両の内外の複数のセンサからの情報を用いて実現されている自動運転方法であって、
車両外部の状況を検知する外界センサを用いて車両の自動走行を行うとともに、車両内部の状況を検知する社内センサを用いて搭乗者が運転可能であるかを判定し、
自動走行が困難、かつ搭乗者が運転を引き継ぐことが困難な場合に、自動走行を困難とする原因である第1のセンサに代えて第2のセンサの情報を用いた代替機能により車両の走行制御を行い、
搭乗者が運転を引き継ぐことが可能になるまでの間、前記代替機能により車両の走行制御を継続することを特徴とする自動運転制御方法。 - 請求項9に記載の自動運転制御方法であって、
高速走行時に第1のセンサとしてミリ波レーダーによる前方の障害物検知を行う場合、その異常により第2のセンサとしてフロントカメラを用い、第2のセンサに映る前方車両のナンバープレート等から、車間距離を推定し運転を継続することを特徴とする自動運転制御方法。 - 請求項9に記載の自動運転制御方法であって、
高速走行時に第1のセンサとしてミリ波レーダーによる車間距離検知を行う場合、その異常により第2のセンサとしてGPSを用い、GPSの位置情報を用いて車間距離を推定し運転を継続することを特徴とする自動運転制御方法。 - 請求項9に記載の自動運転制御方法であって、
高速走行時に第1のセンサとしてミリ波レーダーによる障害物検知を行う場合、その異常により第2のセンサとして車々間通信により互いのセンサ情報が共有可能であれば、前方車両の後方向け距離センサを用いて自車との障害物を検知し運転を継続することを特徴とする自動運転制御方法。 - 請求項9に記載の自動運転制御方法であって、
高速走行時に第1のセンサとして近距離センサによる周辺障害物の検知を行う場合、その異常により第2のセンサとしてフロントカメラやミリ波レーダーを用い、これらの過去の情報を元に、近傍車両の位置を推定し走行を維持することを特徴とする自動運転制御方法。 - 請求項9に記載の自動運転制御方法であって、
高速走行時に第1のセンサとして近距離センサによる周辺障害物の検知を行う場合、その異常により第2のセンサとして車々間通信が可能であるならば、自車近傍に車両が居る場合、その位置情報やセンサ情報を共有することによって路肩への安全な停車を行うことを特徴とする自動運転制御方法。 - 請求項9に記載の自動運転制御方法であって、
高速走行時に第1のセンサとして近距離センサによるガードレールや縁石の検知を行う場合、その異常により第2のセンサとしてアラウンドビューに用いる画像を利用して、ガードレールや縁石の位置を取得することを特徴とする自動運転制御方法。 - 請求項9に記載の自動運転制御方法であって、
低速走行時に、第2のセンサとして近距離赤外線センサやアラウンドビュー画像とナビゲーションシステムを用い、ナビゲーションシステムの位置情報と地図情報を用いて現在の走行車線を推定し、近距離赤外線センサやアラウンドビュー画像を用いて最終的な停車位置を決定することを特徴とする自動運転制御方法。 - 請求項9に記載の自動運転制御方法であって、
第2のセンサとして前方車両との車々間通信による、他車両の映像取得とGPS情報と地図情報を組み合わせた制御によって、他車両の位置と自車両に対する観測から、車線変更や走行の維持を行うことを特徴とする自動運転制御方法。 - 請求項9に記載の自動運転制御方法であって、
高速走行時に第1のセンサの不具合のため減速を行いたい場合、第2のセンサとしてリアカメラに移る後続車両の映像から減速の程度を推定することを特徴とする自動運転制御方法。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016053210A JP2017165296A (ja) | 2016-03-17 | 2016-03-17 | 自動運転制御システム |
| US15/443,793 US10176720B2 (en) | 2016-03-17 | 2017-02-27 | Auto driving control system |
| EP17159066.4A EP3219568A1 (en) | 2016-03-17 | 2017-03-03 | Auto driving control system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016053210A JP2017165296A (ja) | 2016-03-17 | 2016-03-17 | 自動運転制御システム |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019215959A Division JP6838124B2 (ja) | 2019-11-29 | 2019-11-29 | 自動運転制御システム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017165296A true JP2017165296A (ja) | 2017-09-21 |
Family
ID=58314082
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016053210A Pending JP2017165296A (ja) | 2016-03-17 | 2016-03-17 | 自動運転制御システム |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US10176720B2 (ja) |
| EP (1) | EP3219568A1 (ja) |
| JP (1) | JP2017165296A (ja) |
Cited By (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019087975A1 (ja) * | 2017-11-01 | 2019-05-09 | 株式会社デンソー | 車両制御装置 |
| JP6522255B1 (ja) * | 2018-04-24 | 2019-05-29 | 三菱電機株式会社 | 行動選択装置、行動選択プログラム及び行動選択方法 |
| JP2019087015A (ja) * | 2017-11-07 | 2019-06-06 | トヨタ自動車株式会社 | 遠隔監視システム及び自律走行車両並びに遠隔監視方法 |
| CN110001633A (zh) * | 2018-01-03 | 2019-07-12 | 上海蔚兰动力科技有限公司 | 自动驾驶与主动驾驶的驾驶危险分类及预防系统与方法 |
| JP2019124975A (ja) * | 2018-01-11 | 2019-07-25 | 株式会社デンソー | 認知症リスクの判定システム |
| KR20190093797A (ko) * | 2018-01-17 | 2019-08-12 | 엘지전자 주식회사 | 차량에 구비된 차량 제어 장치 및 차량의 제어방법 |
| WO2019159575A1 (ja) * | 2018-02-14 | 2019-08-22 | 日立オートモティブシステムズ株式会社 | 駐車支援装置 |
| WO2019167231A1 (ja) * | 2018-03-01 | 2019-09-06 | 本田技研工業株式会社 | 走行制御装置、走行制御方法およびプログラム |
| JP2019152896A (ja) * | 2018-02-28 | 2019-09-12 | 本田技研工業株式会社 | 走行制御装置、走行制御方法およびプログラム |
| JP2019185246A (ja) * | 2018-04-05 | 2019-10-24 | 三菱電機株式会社 | 自動運転制御システム |
| CN110550015A (zh) * | 2018-05-31 | 2019-12-10 | 株式会社电装 | 自动驾驶控制设备和用于车辆的程序产品 |
| CN110745145A (zh) * | 2018-07-19 | 2020-02-04 | 电装国际美国公司 | 用于adas的多传感器管理系统 |
| KR20200046144A (ko) * | 2018-10-15 | 2020-05-07 | 현대자동차주식회사 | 자율 주행 제어 장치, 그를 가지는 차량 및 그 제어 방법 |
| WO2020105408A1 (ja) * | 2018-11-19 | 2020-05-28 | 日立オートモティブシステムズ株式会社 | 車両制御装置及び車両制御方法 |
| WO2020116119A1 (ja) * | 2018-12-04 | 2020-06-11 | 株式会社デンソー | 駐車支援装置 |
| WO2020145441A1 (ko) * | 2019-01-11 | 2020-07-16 | 엘지전자 주식회사 | 차량용 전자 장치 및 차량용 전자 장치의 동작 방법 |
| KR20200087887A (ko) * | 2018-12-28 | 2020-07-22 | 현대자동차주식회사 | 차량 및 차량 제어 방법 |
| CN111452756A (zh) * | 2019-01-22 | 2020-07-28 | 丰田自动车株式会社 | 车辆控制装置 |
| JP2020149323A (ja) * | 2019-03-13 | 2020-09-17 | トヨタ自動車株式会社 | 情報処理装置及び情報処理装置を備える自動走行制御システム |
| WO2021140581A1 (ja) * | 2020-01-08 | 2021-07-15 | 三菱電機株式会社 | 車両制御装置及び車両制御方法 |
| JPWO2020016622A1 (ja) * | 2018-07-16 | 2021-09-02 | 日産自動車株式会社 | 運転支援車両の制御方法及び制御システム |
| JP2021149820A (ja) * | 2020-03-23 | 2021-09-27 | 株式会社デンソー | センサ評価装置 |
| JP2021182254A (ja) * | 2020-05-19 | 2021-11-25 | トヨタ自動車株式会社 | 車載表示システム |
| JP2022512092A (ja) * | 2018-12-11 | 2022-02-02 | ウェイモ エルエルシー | 自律車両のための冗長ハードウェアシステム |
| JP2022118965A (ja) * | 2021-02-03 | 2022-08-16 | 本田技研工業株式会社 | 運転支援装置 |
| JP2022163997A (ja) * | 2021-04-15 | 2022-10-27 | 日野自動車株式会社 | 車両検査装置 |
| JPWO2023079665A1 (ja) * | 2021-11-04 | 2023-05-11 |
Families Citing this family (31)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3127403B8 (en) * | 2014-04-04 | 2019-04-10 | Signify Holding B.V. | System and methods to support autonomous vehicles via environmental perception and sensor calibration and verification |
| US10059346B2 (en) | 2016-06-07 | 2018-08-28 | Ford Global Technologies, Llc | Driver competency during autonomous handoff |
| JP6617126B2 (ja) * | 2017-09-15 | 2019-12-11 | 本田技研工業株式会社 | 走行制御システムおよび車両の制御方法 |
| FR3073803A1 (fr) * | 2017-11-23 | 2019-05-24 | Psa Automobiles Sa | Procede d’assistance a la conduite d’un vehicule lors d’une defaillance d’un equipement et systeme associe. |
| WO2019116459A1 (ja) * | 2017-12-13 | 2019-06-20 | 本田技研工業株式会社 | 車両並びにその制御システム及び制御方法 |
| JP6883532B2 (ja) * | 2018-01-31 | 2021-06-09 | 株式会社日立製作所 | 自動運転支援装置及びその方法 |
| JP7018330B2 (ja) * | 2018-02-15 | 2022-02-10 | 本田技研工業株式会社 | 車両制御装置 |
| CN110895407A (zh) * | 2018-08-22 | 2020-03-20 | 郑州宇通客车股份有限公司 | 一种融合摄像与定位的自动驾驶车辆运行控制方法及车辆 |
| JP7202112B2 (ja) * | 2018-09-11 | 2023-01-11 | 本田技研工業株式会社 | 車両用制御システムおよび車両の制御方法 |
| SE542584C2 (en) * | 2018-10-08 | 2020-06-09 | Scania Cv Ab | Method and control device for configuring a modular vehicle |
| KR102690634B1 (ko) * | 2018-12-17 | 2024-08-02 | 현대자동차주식회사 | 차량 및 그 제어방법 |
| US11235776B2 (en) * | 2019-01-31 | 2022-02-01 | Toyota Motor Engineering & Manufacturing North America, Inc. | Systems and methods for controlling a vehicle based on driver engagement |
| JP7307549B2 (ja) * | 2019-02-15 | 2023-07-12 | 株式会社Subaru | 車両の運転制御システム |
| GB2583698B (en) | 2019-04-08 | 2021-10-06 | Jaguar Land Rover Ltd | Vehicle localisation |
| JP7230717B2 (ja) * | 2019-07-16 | 2023-03-01 | 株式会社Soken | 車両用通知制御装置及び車両用通知制御方法 |
| CN110466495B (zh) * | 2019-09-02 | 2024-04-09 | 浙江鸿吉智能控制有限公司 | 一种智能自动矢量驾驶执行系统及控制方法 |
| KR20210042188A (ko) * | 2019-10-08 | 2021-04-19 | 현대자동차주식회사 | 차량 및 그 제어방법 |
| JP6950015B2 (ja) * | 2020-02-12 | 2021-10-13 | 本田技研工業株式会社 | 走行制御装置、車両、走行制御方法及びプログラム |
| JP6946495B2 (ja) * | 2020-03-04 | 2021-10-06 | 本田技研工業株式会社 | 車両制御装置及び車両制御方法 |
| CN111559248B (zh) * | 2020-05-15 | 2023-04-14 | 中国重汽集团济南动力有限公司 | 一种基于安全的自动驾驶纯电动客车控制系统及方法 |
| US12291236B1 (en) | 2020-11-06 | 2025-05-06 | Waymo Llc | Using the presence of road surface and surrounding area illumination to detect occluded objects |
| CN115457353B (zh) * | 2021-05-21 | 2026-04-21 | 魔门塔(苏州)科技有限公司 | 一种多传感器数据的融合方法及装置 |
| JP7746712B2 (ja) * | 2021-07-09 | 2025-10-01 | 株式会社デンソー | 車両用装置および車両制御方法 |
| DE102021003918A1 (de) * | 2021-07-30 | 2023-02-02 | Mercedes-Benz Group AG | Verfahren zur Bestimmung einer Aktionsstrategie eines im automatisierten Fahrbetrieb fahrenden Fahrzeuges |
| US12589770B2 (en) * | 2021-08-30 | 2026-03-31 | Robert Bosch Gmbh | Safety controller for automated driving |
| CN113808454A (zh) * | 2021-09-09 | 2021-12-17 | 东风悦享科技有限公司 | 一种自动驾驶车辆感知端传感器教学台架 |
| CN116209608A (zh) * | 2021-09-29 | 2023-06-02 | 华为技术有限公司 | 车辆控制的方法和装置 |
| US12487355B2 (en) * | 2022-01-28 | 2025-12-02 | Magna Electronics Inc. | Vehicular driving assist system using radar and communication with other vehicles |
| JP7635748B2 (ja) * | 2022-04-05 | 2025-02-26 | トヨタ自動車株式会社 | 車両制御装置、車両および車両システム |
| JP7816077B2 (ja) * | 2022-10-28 | 2026-02-18 | トヨタ自動車株式会社 | 情報処理方法、及び情報処理装置 |
| CN116043747B (zh) * | 2022-11-23 | 2026-03-20 | 深圳市易恬技术有限公司 | 一种辅助落杆控制装置、方法及栏杆机 |
Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000289636A (ja) * | 1999-04-07 | 2000-10-17 | Mitsubishi Electric Corp | 車両のステアリング角度制御装置 |
| KR20070095081A (ko) * | 2006-03-20 | 2007-09-28 | 주식회사 만도 | 차량 자세제어장치 및 그 제어방법 |
| JP2008302746A (ja) * | 2007-06-05 | 2008-12-18 | Fujitsu Ten Ltd | 車両制御装置及び車両制御方法 |
| JP2010211528A (ja) * | 2009-03-10 | 2010-09-24 | Toyota Motor Corp | 走行支援装置 |
| JP2011048520A (ja) * | 2009-08-26 | 2011-03-10 | Alpine Electronics Inc | 車両周辺監視装置および車両周辺監視方法 |
| JP2011161956A (ja) * | 2010-02-04 | 2011-08-25 | Honda Motor Co Ltd | 中央制御装置 |
| JP2013133096A (ja) * | 2011-12-26 | 2013-07-08 | Hyundai Motor Co Ltd | 側後方感知センサーを用いた車間距離制御システム及びその制御方法 |
| JP2015168972A (ja) * | 2014-03-06 | 2015-09-28 | 住友建機株式会社 | 建設機械用監視装置 |
| JP2015176447A (ja) * | 2014-03-17 | 2015-10-05 | 株式会社デンソー | 自動ブレーキシステム |
| DE102014210147A1 (de) * | 2014-05-27 | 2015-12-03 | Continental Teves Ag & Co. Ohg | Fahrzeugsteuersystem für eine autonome Führung eines Fahrzeugs |
| JP2016013751A (ja) * | 2014-07-01 | 2016-01-28 | 株式会社デンソー | 制御装置 |
Family Cites Families (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE19944556B4 (de) | 1999-09-17 | 2008-11-06 | Robert Bosch Gmbh | Verfahren und Vorrichtung zur Steuerung einer Bremsanlage |
| KR100753983B1 (ko) * | 2006-03-07 | 2007-08-31 | 김학선 | 차량의 주행안전거리 자동제어시스템과 그 방법 |
| JP4775177B2 (ja) | 2006-08-25 | 2011-09-21 | 株式会社デンソー | 走行制御装置 |
| US20080167820A1 (en) * | 2007-01-04 | 2008-07-10 | Kentaro Oguchi | System for predicting driver behavior |
| JP2009061943A (ja) | 2007-09-06 | 2009-03-26 | Toyota Motor Corp | 車両走行制御装置 |
| US9187095B2 (en) * | 2010-10-12 | 2015-11-17 | Volvo Lastvagnar Ab | Method and arrangement for entering a preceding vehicle autonomous following mode |
| JP5533810B2 (ja) | 2011-07-23 | 2014-06-25 | 株式会社デンソー | 追従走行制御装置 |
| DE102013217430B4 (de) * | 2012-09-04 | 2026-02-26 | Magna Electronics, Inc. | Fahrerassistenzsystem für ein Kraftfahrzeug |
| EP2752348A1 (en) * | 2013-01-04 | 2014-07-09 | Continental Automotive Systems, Inc. | Adaptive emergency brake and steer assist system based on driver focus |
| JP2014181020A (ja) | 2013-03-21 | 2014-09-29 | Denso Corp | 走行制御装置 |
| JP2015032291A (ja) | 2013-08-07 | 2015-02-16 | トヨタ自動車株式会社 | 自動走行支援装置 |
| JP6187090B2 (ja) | 2013-09-25 | 2017-08-30 | 日産自動車株式会社 | 車両用運転制御装置及び車両用運転制御方法 |
| DE102013219887A1 (de) | 2013-10-01 | 2015-04-02 | Volkswagen Aktiengesellschaft | Verfahren für ein Fahrerassistenzsystem eines Fahrzeugs |
| DE102013222048B4 (de) | 2013-10-30 | 2023-10-05 | Volkswagen Aktiengesellschaft | Verfahren und Vorrichtung zum Aktivieren oder Deaktivieren einer automatischen Fahrfunktion |
| JP6042794B2 (ja) * | 2013-12-03 | 2016-12-14 | 本田技研工業株式会社 | 車両制御方法 |
| US9254824B2 (en) * | 2013-12-30 | 2016-02-09 | Automotive Research & Testing Center | Adaptive anti-collision method for vehicle |
| EP2921362B1 (en) | 2014-03-18 | 2020-08-12 | Volvo Car Corporation | Vehicle, vehicle system and method for increasing safety and/or comfort during autonomous driving |
| US20160026032A1 (en) * | 2014-07-23 | 2016-01-28 | Chad B. Moore | ELECTRONIC SHELF (eShelf) |
| CN107249955B (zh) * | 2014-12-31 | 2020-09-08 | 罗伯特·博世有限公司 | 控制自主车辆中的自主驾驶模式 |
| US20160260328A1 (en) * | 2015-03-06 | 2016-09-08 | Qualcomm Incorporated | Real-time Occupancy Mapping System for Autonomous Vehicles |
| KR101787990B1 (ko) * | 2016-06-29 | 2017-10-23 | 주식회사다스 | 차량용 시트의 리클라이닝장치 |
-
2016
- 2016-03-17 JP JP2016053210A patent/JP2017165296A/ja active Pending
-
2017
- 2017-02-27 US US15/443,793 patent/US10176720B2/en active Active
- 2017-03-03 EP EP17159066.4A patent/EP3219568A1/en not_active Ceased
Patent Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000289636A (ja) * | 1999-04-07 | 2000-10-17 | Mitsubishi Electric Corp | 車両のステアリング角度制御装置 |
| KR20070095081A (ko) * | 2006-03-20 | 2007-09-28 | 주식회사 만도 | 차량 자세제어장치 및 그 제어방법 |
| JP2008302746A (ja) * | 2007-06-05 | 2008-12-18 | Fujitsu Ten Ltd | 車両制御装置及び車両制御方法 |
| JP2010211528A (ja) * | 2009-03-10 | 2010-09-24 | Toyota Motor Corp | 走行支援装置 |
| JP2011048520A (ja) * | 2009-08-26 | 2011-03-10 | Alpine Electronics Inc | 車両周辺監視装置および車両周辺監視方法 |
| JP2011161956A (ja) * | 2010-02-04 | 2011-08-25 | Honda Motor Co Ltd | 中央制御装置 |
| JP2013133096A (ja) * | 2011-12-26 | 2013-07-08 | Hyundai Motor Co Ltd | 側後方感知センサーを用いた車間距離制御システム及びその制御方法 |
| JP2015168972A (ja) * | 2014-03-06 | 2015-09-28 | 住友建機株式会社 | 建設機械用監視装置 |
| JP2015176447A (ja) * | 2014-03-17 | 2015-10-05 | 株式会社デンソー | 自動ブレーキシステム |
| DE102014210147A1 (de) * | 2014-05-27 | 2015-12-03 | Continental Teves Ag & Co. Ohg | Fahrzeugsteuersystem für eine autonome Führung eines Fahrzeugs |
| JP2016013751A (ja) * | 2014-07-01 | 2016-01-28 | 株式会社デンソー | 制御装置 |
Cited By (71)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11396311B2 (en) | 2017-11-01 | 2022-07-26 | Denso Corporation | Vehicle control device |
| JP2019084855A (ja) * | 2017-11-01 | 2019-06-06 | 株式会社デンソー | 車両制御装置 |
| WO2019087975A1 (ja) * | 2017-11-01 | 2019-05-09 | 株式会社デンソー | 車両制御装置 |
| JP2019087015A (ja) * | 2017-11-07 | 2019-06-06 | トヨタ自動車株式会社 | 遠隔監視システム及び自律走行車両並びに遠隔監視方法 |
| CN110001633A (zh) * | 2018-01-03 | 2019-07-12 | 上海蔚兰动力科技有限公司 | 自动驾驶与主动驾驶的驾驶危险分类及预防系统与方法 |
| JP7087392B2 (ja) | 2018-01-11 | 2022-06-21 | 株式会社デンソー | 認知症リスクの判定システム |
| JP2019124975A (ja) * | 2018-01-11 | 2019-07-25 | 株式会社デンソー | 認知症リスクの判定システム |
| KR102073861B1 (ko) * | 2018-01-17 | 2020-02-05 | 엘지전자 주식회사 | 차량에 구비된 차량 제어 장치 및 차량의 제어방법 |
| KR20190093797A (ko) * | 2018-01-17 | 2019-08-12 | 엘지전자 주식회사 | 차량에 구비된 차량 제어 장치 및 차량의 제어방법 |
| US11052917B2 (en) | 2018-01-17 | 2021-07-06 | Lg Electronics Inc. | Vehicle control device provided in vehicle and method for controlling vehicle |
| WO2019159575A1 (ja) * | 2018-02-14 | 2019-08-22 | 日立オートモティブシステムズ株式会社 | 駐車支援装置 |
| JP7092863B2 (ja) | 2018-02-14 | 2022-06-28 | 日立Astemo株式会社 | 駐車支援装置 |
| JPWO2019159575A1 (ja) * | 2018-02-14 | 2020-12-17 | 日立オートモティブシステムズ株式会社 | 駐車支援装置 |
| JP2019152896A (ja) * | 2018-02-28 | 2019-09-12 | 本田技研工業株式会社 | 走行制御装置、走行制御方法およびプログラム |
| JP7048353B2 (ja) | 2018-02-28 | 2022-04-05 | 本田技研工業株式会社 | 走行制御装置、走行制御方法およびプログラム |
| US11208118B2 (en) | 2018-03-01 | 2021-12-28 | Honda Motor Co., Ltd. | Travel control device, travel control method, and computer-readable storage medium storing program |
| CN111758125B (zh) * | 2018-03-01 | 2022-03-22 | 本田技研工业株式会社 | 行驶控制装置、行驶控制方法以及程序 |
| WO2019167231A1 (ja) * | 2018-03-01 | 2019-09-06 | 本田技研工業株式会社 | 走行制御装置、走行制御方法およびプログラム |
| CN111758125A (zh) * | 2018-03-01 | 2020-10-09 | 本田技研工业株式会社 | 行驶控制装置、行驶控制方法以及程序 |
| JPWO2019167231A1 (ja) * | 2018-03-01 | 2021-02-25 | 本田技研工業株式会社 | 走行制御装置、走行制御方法およびプログラム |
| JP2019185246A (ja) * | 2018-04-05 | 2019-10-24 | 三菱電機株式会社 | 自動運転制御システム |
| WO2019207639A1 (ja) * | 2018-04-24 | 2019-10-31 | 三菱電機株式会社 | 行動選択装置、行動選択プログラム及び行動選択方法 |
| JP6522255B1 (ja) * | 2018-04-24 | 2019-05-29 | 三菱電機株式会社 | 行動選択装置、行動選択プログラム及び行動選択方法 |
| CN110550015A (zh) * | 2018-05-31 | 2019-12-10 | 株式会社电装 | 自动驾驶控制设备和用于车辆的程序产品 |
| JP7210906B2 (ja) | 2018-05-31 | 2023-01-24 | 株式会社デンソー | 車両の自動運転制御装置及びプログラム |
| JP2019209714A (ja) * | 2018-05-31 | 2019-12-12 | 株式会社デンソー | 車両の自動運転制御装置及びプログラム |
| JP7074193B2 (ja) | 2018-07-16 | 2022-05-25 | 日産自動車株式会社 | 運転支援車両の制御方法及び制御システム |
| JPWO2020016622A1 (ja) * | 2018-07-16 | 2021-09-02 | 日産自動車株式会社 | 運転支援車両の制御方法及び制御システム |
| CN110745145B (zh) * | 2018-07-19 | 2022-12-23 | 电装国际美国公司 | 用于adas的多传感器管理系统 |
| CN110745145A (zh) * | 2018-07-19 | 2020-02-04 | 电装国际美国公司 | 用于adas的多传感器管理系统 |
| KR102575640B1 (ko) | 2018-10-15 | 2023-09-07 | 현대자동차주식회사 | 자율 주행 제어 장치, 그를 가지는 차량 및 그 제어 방법 |
| KR20200046144A (ko) * | 2018-10-15 | 2020-05-07 | 현대자동차주식회사 | 자율 주행 제어 장치, 그를 가지는 차량 및 그 제어 방법 |
| JP7198056B2 (ja) | 2018-11-19 | 2022-12-28 | 日立Astemo株式会社 | 車両制御装置及び車両制御方法 |
| WO2020105408A1 (ja) * | 2018-11-19 | 2020-05-28 | 日立オートモティブシステムズ株式会社 | 車両制御装置及び車両制御方法 |
| JP2020082855A (ja) * | 2018-11-19 | 2020-06-04 | 日立オートモティブシステムズ株式会社 | 車両制御装置及び車両制御方法 |
| CN113165643B (zh) * | 2018-12-04 | 2024-02-13 | 株式会社电装 | 停车辅助装置 |
| JP7221669B2 (ja) | 2018-12-04 | 2023-02-14 | 株式会社デンソー | 駐車支援装置 |
| US12043247B2 (en) | 2018-12-04 | 2024-07-23 | Denso Corporation | Parking assist apparatus |
| JP2020090145A (ja) * | 2018-12-04 | 2020-06-11 | 株式会社デンソー | 駐車支援装置 |
| JP2022171734A (ja) * | 2018-12-04 | 2022-11-11 | 株式会社デンソー | 駐車支援装置 |
| JP7444211B2 (ja) | 2018-12-04 | 2024-03-06 | 株式会社デンソー | 駐車支援装置 |
| CN113165643A (zh) * | 2018-12-04 | 2021-07-23 | 株式会社电装 | 停车辅助装置 |
| WO2020116119A1 (ja) * | 2018-12-04 | 2020-06-11 | 株式会社デンソー | 駐車支援装置 |
| US12559115B2 (en) | 2018-12-11 | 2026-02-24 | Waymo Llc | Redundant hardware system for autonomous vehicles |
| JP7239700B2 (ja) | 2018-12-11 | 2023-03-14 | ウェイモ エルエルシー | 自律車両のための冗長ハードウェアシステム |
| US11912292B2 (en) | 2018-12-11 | 2024-02-27 | Waymo Llc | Redundant hardware system for autonomous vehicles |
| JP2022512092A (ja) * | 2018-12-11 | 2022-02-02 | ウェイモ エルエルシー | 自律車両のための冗長ハードウェアシステム |
| KR20200087887A (ko) * | 2018-12-28 | 2020-07-22 | 현대자동차주식회사 | 차량 및 차량 제어 방법 |
| KR102757213B1 (ko) * | 2018-12-28 | 2025-01-21 | 현대자동차주식회사 | 차량 및 차량 제어 방법 |
| WO2020145441A1 (ko) * | 2019-01-11 | 2020-07-16 | 엘지전자 주식회사 | 차량용 전자 장치 및 차량용 전자 장치의 동작 방법 |
| KR20210104185A (ko) * | 2019-01-11 | 2021-08-25 | 엘지전자 주식회사 | 차량용 전자 장치 및 차량용 전자 장치의 동작 방법 |
| KR102649709B1 (ko) * | 2019-01-11 | 2024-03-20 | 엘지전자 주식회사 | 차량용 전자 장치 및 차량용 전자 장치의 동작 방법 |
| CN111452756A (zh) * | 2019-01-22 | 2020-07-28 | 丰田自动车株式会社 | 车辆控制装置 |
| JP2020117014A (ja) * | 2019-01-22 | 2020-08-06 | トヨタ自動車株式会社 | 車両制御装置 |
| JP7116924B2 (ja) | 2019-03-13 | 2022-08-12 | トヨタ自動車株式会社 | 情報処理装置及び情報処理装置を備える自動走行制御システム |
| US11422557B2 (en) | 2019-03-13 | 2022-08-23 | Toyota Jidosha Kabushiki Kaisha | Information processing device and autonomous traveling control system including information processing device |
| JP2020149323A (ja) * | 2019-03-13 | 2020-09-17 | トヨタ自動車株式会社 | 情報処理装置及び情報処理装置を備える自動走行制御システム |
| JP7221422B2 (ja) | 2020-01-08 | 2023-02-13 | 三菱電機株式会社 | 車両制御装置及び車両制御方法 |
| US12235640B2 (en) | 2020-01-08 | 2025-02-25 | Mitsubishi Electric Corporation | Vehicle control device and vehicle control method |
| CN114868169A (zh) * | 2020-01-08 | 2022-08-05 | 三菱电机株式会社 | 车辆控制装置及车辆控制方法 |
| WO2021140581A1 (ja) * | 2020-01-08 | 2021-07-15 | 三菱電機株式会社 | 車両制御装置及び車両制御方法 |
| JPWO2021140581A1 (ja) * | 2020-01-08 | 2021-07-15 | ||
| JP2021149820A (ja) * | 2020-03-23 | 2021-09-27 | 株式会社デンソー | センサ評価装置 |
| JP2021182254A (ja) * | 2020-05-19 | 2021-11-25 | トヨタ自動車株式会社 | 車載表示システム |
| JP7207366B2 (ja) | 2020-05-19 | 2023-01-18 | トヨタ自動車株式会社 | 車載表示システム |
| JP2022118965A (ja) * | 2021-02-03 | 2022-08-16 | 本田技研工業株式会社 | 運転支援装置 |
| JP7213279B2 (ja) | 2021-02-03 | 2023-01-26 | 本田技研工業株式会社 | 運転支援装置 |
| JP2022163997A (ja) * | 2021-04-15 | 2022-10-27 | 日野自動車株式会社 | 車両検査装置 |
| WO2023079665A1 (ja) * | 2021-11-04 | 2023-05-11 | 株式会社Subaru | 運転制御システム |
| JP2025094165A (ja) * | 2021-11-04 | 2025-06-24 | 株式会社Subaru | 運転制御システム |
| JPWO2023079665A1 (ja) * | 2021-11-04 | 2023-05-11 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20170270798A1 (en) | 2017-09-21 |
| EP3219568A1 (en) | 2017-09-20 |
| US10176720B2 (en) | 2019-01-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6838124B2 (ja) | 自動運転制御システム | |
| JP2017165296A (ja) | 自動運転制御システム | |
| JP7122032B2 (ja) | 自動運転制御装置及び車両 | |
| JP6677822B2 (ja) | 車両制御装置 | |
| CN109515434B (zh) | 车辆控制装置、车辆控制方法及存储介质 | |
| CN111746515B (zh) | 车辆控制系统 | |
| JP4578795B2 (ja) | 車両制御装置、車両制御方法および車両制御プログラム | |
| JP4309843B2 (ja) | 車両の衝突を阻止する方法および装置 | |
| CN110281930A (zh) | 车辆控制装置、车辆、车辆控制方法以及存储介质 | |
| CN111746516A (zh) | 车辆控制系统 | |
| JP7435725B2 (ja) | 運転支援装置 | |
| US20180151074A1 (en) | Collision avoidance support device provided with braking release means and collision avoidance support method | |
| WO2020157533A1 (ja) | 車両の走行制御方法及び走行制御装置 | |
| JP2005056372A5 (ja) | ||
| WO2019043847A1 (ja) | 走行制御装置、車両および走行制御方法 | |
| JP6636484B2 (ja) | 走行制御装置、走行制御方法およびプログラム | |
| JP7053707B2 (ja) | 車両及びその制御装置 | |
| US11752986B2 (en) | Driving assistance device | |
| JP2019156269A (ja) | 車両制御装置、車両制御方法、及びプログラム | |
| JP6632581B2 (ja) | 走行制御装置、走行制御方法およびプログラム | |
| JP2019053476A (ja) | 走行制御装置、走行制御方法およびプログラム | |
| WO2023068162A1 (ja) | 自動運行装置、合流車応答制御方法 | |
| US20250249929A1 (en) | Vehicle control device and vehicle control method | |
| JP7282115B2 (ja) | 運転支援装置 | |
| JP7652329B2 (ja) | 車両制御装置、車両制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20161201 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180228 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20181221 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190205 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190327 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190604 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190718 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20190910 |