JP2017166582A - バルブ - Google Patents
バルブ Download PDFInfo
- Publication number
- JP2017166582A JP2017166582A JP2016052550A JP2016052550A JP2017166582A JP 2017166582 A JP2017166582 A JP 2017166582A JP 2016052550 A JP2016052550 A JP 2016052550A JP 2016052550 A JP2016052550 A JP 2016052550A JP 2017166582 A JP2017166582 A JP 2017166582A
- Authority
- JP
- Japan
- Prior art keywords
- valve
- clutch member
- flow path
- contact member
- clutch
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000000034 method Methods 0.000 claims abstract description 33
- 230000008569 process Effects 0.000 claims abstract description 33
- 238000000926 separation method Methods 0.000 claims abstract description 16
- 230000033001 locomotion Effects 0.000 claims description 9
- 238000003825 pressing Methods 0.000 claims description 7
- 230000005540 biological transmission Effects 0.000 claims description 4
- 230000008859 change Effects 0.000 description 15
- 230000002093 peripheral effect Effects 0.000 description 12
- 230000004048 modification Effects 0.000 description 9
- 238000012986 modification Methods 0.000 description 9
- 210000000080 chela (arthropods) Anatomy 0.000 description 8
- 238000004891 communication Methods 0.000 description 6
- 239000012530 fluid Substances 0.000 description 6
- 230000009471 action Effects 0.000 description 5
- 239000000463 material Substances 0.000 description 5
- 229920001343 polytetrafluoroethylene Polymers 0.000 description 5
- 239000004810 polytetrafluoroethylene Substances 0.000 description 5
- 239000004743 Polypropylene Substances 0.000 description 4
- 239000004698 Polyethylene Substances 0.000 description 3
- 230000003028 elevating effect Effects 0.000 description 3
- 239000012535 impurity Substances 0.000 description 3
- 230000007246 mechanism Effects 0.000 description 3
- 239000004033 plastic Substances 0.000 description 3
- 229920003023 plastic Polymers 0.000 description 3
- -1 polypropylene Polymers 0.000 description 3
- 230000007704 transition Effects 0.000 description 3
- 229920001577 copolymer Polymers 0.000 description 2
- 229920001971 elastomer Polymers 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 229920000915 polyvinyl chloride Polymers 0.000 description 2
- 239000004800 polyvinyl chloride Substances 0.000 description 2
- BFKJFAAPBSQJPD-UHFFFAOYSA-N tetrafluoroethene Chemical group FC(F)=C(F)F BFKJFAAPBSQJPD-UHFFFAOYSA-N 0.000 description 2
- 238000011144 upstream manufacturing Methods 0.000 description 2
- 229920002943 EPDM rubber Polymers 0.000 description 1
- 229920000459 Nitrile rubber Polymers 0.000 description 1
- 239000002033 PVDF binder Substances 0.000 description 1
- 229920006169 Perfluoroelastomer Polymers 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 239000003638 chemical reducing agent Substances 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 229910052571 earthenware Inorganic materials 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 239000000806 elastomer Substances 0.000 description 1
- 229920001973 fluoroelastomer Polymers 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 239000004519 grease Substances 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 239000004570 mortar (masonry) Substances 0.000 description 1
- 230000000149 penetrating effect Effects 0.000 description 1
- 229920000573 polyethylene Polymers 0.000 description 1
- 229920001155 polypropylene Polymers 0.000 description 1
- 229920002981 polyvinylidene fluoride Polymers 0.000 description 1
- 230000000630 rising effect Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 229920002379 silicone rubber Polymers 0.000 description 1
- 125000006850 spacer group Chemical group 0.000 description 1
- 229910001220 stainless steel Inorganic materials 0.000 description 1
- 239000010935 stainless steel Substances 0.000 description 1
- 239000000126 substance Substances 0.000 description 1
- 230000008961 swelling Effects 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
Images



















Landscapes
- Electrically Driven Valve-Operating Means (AREA)
Abstract
【課題】圧縮空気を必要とせず、汎用な用力条件下でも、瞬間的に流路を開放または閉止することができるバルブを提供する。
【解決手段】本発明のバルブ1は、電気駆動手段7の動力を弁体5に伝達する当接部材36を備える弁軸6と、電気駆動手段に備えられ、電気駆動手段の動力を、当接部材を介して弁軸に機械的に伝達するクラッチ部材56と、弁体を流路閉止方向または流路開放方向のどちらか一方の方向に駆動する弾性体28と、を備える。流路3を閉止する閉工程または流路を開放する開工程のどちらか一方の工程では、クラッチ部材が当接部材から離間する離間工程を含む。離間工程では、弾性体のみが弁体を駆動する。閉工程または開工程の他方の工程では、クラッチ部材が常に当接部材に当接し、電気駆動手段のみが弁体を駆動する。上記一方の工程に要する時間が他方の工程に要する時間よりも短い。
【選択図】図2
【解決手段】本発明のバルブ1は、電気駆動手段7の動力を弁体5に伝達する当接部材36を備える弁軸6と、電気駆動手段に備えられ、電気駆動手段の動力を、当接部材を介して弁軸に機械的に伝達するクラッチ部材56と、弁体を流路閉止方向または流路開放方向のどちらか一方の方向に駆動する弾性体28と、を備える。流路3を閉止する閉工程または流路を開放する開工程のどちらか一方の工程では、クラッチ部材が当接部材から離間する離間工程を含む。離間工程では、弾性体のみが弁体を駆動する。閉工程または開工程の他方の工程では、クラッチ部材が常に当接部材に当接し、電気駆動手段のみが弁体を駆動する。上記一方の工程に要する時間が他方の工程に要する時間よりも短い。
【選択図】図2
Description
本発明は、化学工場、半導体製造、食品、バイオなどの各種産業分野における各種流体を移送するときに用いられるバルブに関する。
従来、各種流体を移送する管体を内部に有するピンチバルブには様々なものが存在する。例えば、ベース体とこれに取り付けたカバーとからなる弁箱と、カバー内に配置されたモータと、ベース体に設けられた横方向に貫通する空間部に配置された弾性復原力を有する流路用チューブと、ベース体の中央部に設けられた縦孔に配置された昇降体と、を有し、昇降体はモータの正逆駆動により上下動され、昇降体の下端に設けられ流路用チューブに臨む押圧体が流路用チューブを径方向に押圧したり押圧力を解放したりすることによって、流路用チューブの断面形状が変形される構成のピンチバルブがあった。(例えば、特許文献1を参照)
しかしながら、上記特許文献1記載のバルブでは、圧縮空気を必要とせず、汎用な用力条件下でバルブを使用することができるが、電気駆動手段であるモータにより押圧体を上下動しているので、瞬間的に流路を開放または閉止することは困難であった。例えば、バルブの上流から不純物を含む流体が流れて来ることを検知した場合において、バルブを速やかに閉止してバルブの下流に不純物を含む流体が流れることを防止することが求められる場合がある。このような場合に、従来のバルブでは、流路を閉止するのに比較的長時間を必要とし、バルブの下流に不純物を含む流体が多く流れてしまうという不都合があった。
本発明の目的は、圧縮空気を必要とせず、汎用な用力条件下でも、瞬間的に流路を開放または閉止することができるバルブを提供することである。
請求項1の発明によれば、流路を有するバルブ本体と、前記流路を開放または閉止する弁体と、前記弁体を駆動する電気駆動手段と、前記電気駆動手段の動力を前記弁体に伝達する当接部材を備える弁軸と、前記電気駆動手段に備えられ、前記電気駆動手段の動力を、前記当接部材を介して前記弁軸に機械的に伝達するクラッチ部材と、前記弁体を流路閉止方向または流路開放方向のどちらか一方の方向に駆動する弾性体と、を備え、前記流路を閉止する閉工程または前記流路を開放する開工程のどちらか一方の工程では、前記クラッチ部材が前記当接部材から離間する離間工程を含み、前記離間工程では、前記弾性体のみが前記弁体を駆動し、前記閉工程または前記開工程の他方の工程では、前記クラッチ部材が常に前記当接部材に当接し、前記電気駆動手段のみが前記弁体を駆動し、前記一方の工程に要する時間が前記他方の工程に要する時間よりも短いことを特徴とするバルブが提供される。
すなわち、請求項1の発明では、空気駆動手段を用いずに流路を開閉することができるので、圧縮空気を必要とせず、汎用な用力条件下でバルブを使用することができる。また、クラッチ部材と弁軸とを離間させることによって、電気駆動手段の動力を弁軸に機械的に遮断する離間工程を設けたので、弾性体のみで弁体を駆動することができ、流路を瞬間的に閉止または開放することができる。
請求項2の発明によれば、前記クラッチ部材は、前記一方の工程において前記クラッチ部材が前記当接部材と離間させるクラッチ部を含む第一領域と、前記他方の工程において前記電気駆動手段の動力によりの前記弁軸を駆動する第二領域と、を有し、第一領域の形状と第二領域の形状が異なっていることを特徴とする、請求項1に記載のバルブが提供される。
すなわち、請求項2の発明では、クラッチ部材の第一領域と第二領域との形状が異なっている。このようにすることによって、開工程と閉工程のそれぞれに要求される流路の開度変化に応じて、第一領域と第二領域の形状を自由に設計することができる。
請求項3の発明によれば、前記流路が全閉または全開している状態において、前記クラッチ部材は前記電気駆動手段の動力の前記弁軸への伝達が遮断されていることを特徴とする、請求項1または請求項2に記載のバルブが提供される。
すなわち、請求項3の発明では、流路が全閉または全開している状態において、弾性体の付勢力を弁体に効果的に伝えることができるので、流路を確実に全閉状態または全開状態にすることができる。
請求項4の発明によれば、前記電気駆動手段が、動力を前記クラッチ部材に伝達する駆動軸を備え、回転運動を動力として出力する回転型電動機であり、前記回転型電動機は、前記駆動軸が前記流路と同じ方向に延びるように配置されていることを特徴とする、請求項1乃至請求項3のいずれか1項に記載のバルブが提供される。
すなわち、請求項4の発明では、電気駆動手段として汎用的な電動機を用いることができる。また、回転型電動機が駆動軸と流路の方向が同じ方向になるように配置されているので、バルブをコンパクトにすることができる。
請求項5の発明によれば、前記電気駆動手段が回転運動を動力として出力する回転型電動機であり、前記クラッチ部材が板カムであり、前記クラッチ部が平面部であることを特徴とする、請求項2に記載のバルブが提供される。
すなわち、請求項5の発明では、クラッチ部材を簡単な構成とすることができる。また、第一領域に平面部を設けることによって、単位回転角度当たりの弁体の移動量を大きくすることができる。
請求項6の発明によれば、前記電気駆動手段が回転運動を動力として出力する回転型電動機であり、前記クラッチ部材が板カムであり、前記クラッチ部が前記クラッチ部材の内側にくぼむ凹曲面であることを特徴とする、請求項2に記載のバルブが提供される。
すなわち、請求項6の発明では、クラッチ部材を簡単な構成とすることができる。また、第一領域にクラッチ部材の内側にくぼむ凹曲面を設けることによって、単位回転角度当たりの弁体の移動量を大きくすることができる。
請求項7の発明によれば、前記バルブ本体は弾性を有する管体を備え、前記流路は前記管体の内部に形成され、前記弁体は前記管体を押圧しまたは押圧を解除することによって前記流路を閉止または開放することを特徴とする、請求項1乃至請求項6のいずれか1項に記載のバルブが提供される。
請求項1乃至請求項7に記載の発明によれば、圧縮空気を必要とせず、汎用な用力条件下でも、瞬間的に流路を開放または閉止することができるバルブを提供することができる。
以下、本発明の実施の形態について図面を参照しつつ説明するが、本発明がこれらの実施の形態に限定されないことは言うまでもない。
―第一の実施の形態―
以下、図1〜図6を参照して、本発明によるピンチバルブ1の第一の実施の形態について説明する。図1は第一の実施の形態に係るピンチバルブの斜視図であり、図2は第一の実施の形態に係るピンチバルブの全開状態を示す図1のA−A断面図であり、図3は第一の実施の形態に係るピンチバルブの全閉状態を示す図1のA−A断面図であり、図4は第一の実施の形態に係るピンチバルブの分解斜視図であり、図5はピンチバルブの他の分解斜視図であり、図6A〜図6Dは第一の実施の形態に係るピンチバルブの伝達部材と当接部材の位置関係の変化を示す図1のB−B部分断面図である。
以下、図1〜図6を参照して、本発明によるピンチバルブ1の第一の実施の形態について説明する。図1は第一の実施の形態に係るピンチバルブの斜視図であり、図2は第一の実施の形態に係るピンチバルブの全開状態を示す図1のA−A断面図であり、図3は第一の実施の形態に係るピンチバルブの全閉状態を示す図1のA−A断面図であり、図4は第一の実施の形態に係るピンチバルブの分解斜視図であり、図5はピンチバルブの他の分解斜視図であり、図6A〜図6Dは第一の実施の形態に係るピンチバルブの伝達部材と当接部材の位置関係の変化を示す図1のB−B部分断面図である。
図1〜3に示すように、第一の実施の形態おいて、ピンチバルブ1は、内部に開閉可能な流路3を有する管体4を備えるバルブ本体2と、管体4を径方向に押圧して流路3を開閉させる弁体である挟圧子5を有する弁軸6と、挟圧子5および弁軸6を上下方向に駆動させる電気駆動手段7とを有する。また、電気駆動手段7は、回転型電動機55と、回転型電動機55の駆動力を弁軸6に伝達するクラッチ部材56とを有する。
第一の実施の形態において、バルブ本体2はポリプロピレン(以下、PPと記す。)製である。図1〜5に示すように、バルブ本体2は略四角柱形状に形成されている。バルブ本体2は本体部11と蓋部12とを備える。本体部11は第一本体部13と第二本体部14とを有する。
第一本体部13の上面には、第二本体部14が位置決めされた状態で固定されている。第一本体部13の正面には、蓋部12が位置決めされた状態で固定されている。第一本体部13の側面には、電気駆動手段7である回転型電動機55を取り付ける、第一の実施の形態ではステンレス鋼(以下、SUSと記す。)製の取り付け板51が位置決めされた状態で固定されている。第一本体部13の上部には有底穴が形成され、有底穴は弾性体である、第一の実施の形態ではSUS製のコイルバネ28を受容する弾性体受容部15となる。弾性体受容部15の底部には挟圧子5が挿通する貫通孔29が形成されている。当該貫通孔29は断面矩形状に形成され、挟圧子5の断面形状に合わせて形成されている。
図4、5に示すように、第一本体部13の正面には、蓋部12を受容する蓋部受容部16が形成されている。蓋部12と対面する蓋部受容部16の面には、断面半円形状の溝17aが形成されている。溝17aは、第一本体部13と対面する蓋部12の面に形成された同形状の溝17bとともに、管体4を受容する管体受容部18を形成する。溝17aの中央部には、断面矩形状の凹部19aが形成されている。凹部19aは、第一本体部13と対面する蓋部12の面に形成された同形状の凹部19bとともに、流路を開閉したときの管体4の変形を許容する弁室20を形成する。弁室20の底面には平滑部材21が配置されている。平滑部材21を弁室20の底面に配置することによって、第一本体部13と蓋部12との境目や段差が管体4内の流路3の開閉を阻害することを防ぐことができる。ここで、平滑部材21は第一本体13または蓋部12に一体形成されてもよい。また、平滑部材21の管体4と接触する部分の形状は、管体4内の流路3の開閉を阻害しない限り特に限定されない。
図2、3に示すように、管体4は内部管体41と、内部管体41の両端に接続される二つの接続部管体42と、を有する。さらに、図2〜5に示すように、管体4は第一本体部13と蓋部12に挟持固定されている。すなわち、管体4はバルブ本体2に囲繞されており、さらに具体的には、内部管体41はバルブ本体2に囲繞されている。管体4が配置される管体受容部18の弁室20の近傍部には、管体4の内部管体41の外周面に当接して、内部管体41を支持する内側支持部22が設けられている。また、管体受容部18の両端部には、管体4の接続部管体42の外周面に当接して、接続部管体42を支持する外側支持部23が設けられている。さらに、管体受容部18の両端部には、接続部管体42の鍔部44に対応する形状を有する溝24aが形成されている。溝24aは、蓋部12の第一本体部13と対面する面に形成された同形状の溝24bとともに、接続部管体42の鍔部44を受容する鍔受部25を形成する。溝17aの接続部管体42と内部管体41が重なり合って配置される部分には複数の突条26aが形成されている。突条26aは、蓋部12の第一本体部13と対面する面に形成された同形状の突条26bとともに、複数の環状突条27を形成する。
図1〜3に示すように、第二本体部14は平坦部31とブロック部32とを有している。平坦部31には、回転型電動機55の駆動軸52を支持する駆動軸支持部材34が位置決めされた状態で固定されている。また、平坦部31には、後述する開度センサ53を装着するセンサ支持部材33が位置決めされた状態で配置されている。また、第二本体部14の中央部には、上下方向に延在している弁軸6が挿通されている貫通孔37が形成されている。当該貫通孔37は断面矩形状に、弁軸6の断面形状に合わせて形成されている。また、ブロック部32の平坦部31側の側面には、弁軸6を支持するコの字形状の凹部38が形成されている。
蓋部12は、電気駆動手段7が本体部11に装着された状態で蓋部12を本体部11から取り外すことができるように、第一本体部13に着脱自在に装着されている。蓋部12の第一本体部13と対面する面には、溝17b、凹部19b、溝24b、突条26bが形成され、それぞれ、第一本体部13の溝17a、凹部19a、溝17a、突条26aとともに管体受容部18、弁室20、鍔受部25、環状突条27を形成している。蓋部12の凹部19bの上側には挟圧子5を支持する切欠47が形成されている。
第一の実施の形態では、電気駆動手段7が本体部11に装着された状態で蓋部12を本体部11から取り外すことができるように構成されているので、容易に管体4を交換することができる。また、管体4のみを交換することができるので、交換部品が嵩張らず、管理が容易である。
弁軸6は、第一の実施形態ではSUS製であり、図2、3に示すように、挟圧子5と、軸部35と、当接部材36とを有する。軸部35は断面矩形状に形成されている。弁軸6の下端部には挟圧子5が設けられている。挟圧子5は流路軸線方向に直交する方向に長手方向を有する断面矩形状に形成されている。挟圧子5の先端部は、流路軸線方向の両端角部に傾斜面を付した先細り形状に形成され、管体4を押圧する部分は曲面で形成されている。軸部35の上端部には当接部材36をボルトで固定するための雌ネジ部が形成されている。当接部材36はベアリングであり、ベアリングの回転軸が軸部35と直交するように固定されている。弁軸6は第二本体部14の貫通孔37および凹部38に軸支されるように配置されているので、流路3を開閉させるときに弁軸6が傾くことを防ぐことができる。また、弁軸6とバルブ本体2との接触面にはグリスが塗られているので、弁軸6を円滑に上下動させることができる。
第一の実施の形態において、内部管体41はシリコンゴムから形成され、接続部管体42はPPから形成されている。接続部管体42はピンチバルブ1の外部の配管と接続される外側接続部43と、外形が矩形板状に形成された鍔部44と、内部管体41の端部に水密状態で挿入される内側接続部45とを有する。外側接続部43はワンタッチ継手から形成されている。管体4は管体受容部18に配置されるとともに、第一本体部13と蓋部12との間に挟持固定されている。このとき、内部管体41は内側支持部22に当接し支持されているので、管体4内にウォーターハンマなどの過剰な圧力が生じても、内部管体41の膨張を抑えることができ、内部管体41が破裂するのを防ぐことができる。内側支持部22の弁室20に相当する部分については、特に流路3が閉止された状況において内部管体41の膨張を抑えることができるように、弁室20の大きさを設計している。接続部管体42は外側支持部23に当接し支持されているので、接続部管体42の機械的強度を補強することができる。
内側接続部45の外周面には環状突条46が形成されている。環状突条46は、管体4が管体受容部18に配置されたときに、管体受容部18の複数の環状突条27の間に位置するように形成されている。環状突条27、46は内部管体41をそれぞれ押圧し、内部管体41と接続部管体42との間の水密性を向上させるとともに、管体4を流れる流体の圧力によって内部管体41が内側接続部45から抜けることを防いでいる。
図1〜3に示すように、電気駆動手段7は取り付け板51を介して第一本体部13に固定されている。電気駆動手段7は回転方向の動力を出力する回転型電動機55と、回転型電動機55の動力を弁軸6に伝達または遮断する伝達手段であるクラッチ部材56と、を有する。回転型電動機55は駆動軸52を有し、駆動軸52の先端部にはクラッチ部材56が固定されている。回転型電動機55は駆動軸52の中心軸を回転軸として駆動軸52を回転させ、動力を駆動軸52からクラッチ部材56及び当接部材36を経て弁軸6に伝達する。第一の実施の形態では、駆動軸52と流路3とが同じ方向に延びるように回転型電動機55が配置されているので、ピンチバルブ1の流路軸線と直交する方向の幅を抑えることができ、ピンチバルブ1をコンパクトにすることができる。
ここで、取り付け板51にはセンサ支持部材33が固定されている。センサ支持部材33には、開度センサ53であるリミットスイッチが装着されている。後述するクラッチ部材56の円筒部材57は概ね円筒形状であるが、開度センサ53を作用させるための面取り部が形成されている。クラッチ部材56が回転し、開度センサ53が面取り部62に当接すると、開度センサ53は当接部材36がクラッチ部材56上の所定の位置に到達したことを検出する。面取り部62は円筒部材57の同一円周上に二か所設けられ、開度センサ53が面取り部62に当接することによって、当接部材36がクラッチ部材56上の全開位置Pまたは原点位置Rに到達したことをそれぞれ検出する(ここで図1において、原点位置Rを検出するための面取り部は図示しない。)。
クラッチ部材56は第一の実施形態ではSUS製であり、駆動軸52が貫通している。図1〜6に示すように、クラッチ部材56はカム部54と円筒部材57とを有している。カム部54は円筒部材57の先端部に一体的に形成されている。カム部54は、大小二つの略半円形状の板を互いの一方の曲面が繋がるように結合した板カムであり、ここでは大きい略半円形状の部分を第一半円形部59と、小さい略半円形状の部分を第二半円形部60と称する。第二半円形部60の弦は第一半円形部59の弦に接するとともに、これら半円形部59、60の中心点は駆動軸52の中心軸上に配置されている。また、第二半円形部60の半径は円筒部材57よりも小さく形成されている。その結果、カム部81の第一半円形部59の周側面は当接部材36に当接するが、第二半円形部60の周側面は当接部材36と離間する。
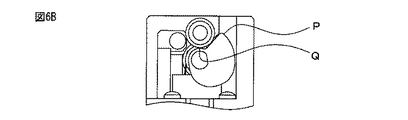
クラッチ部材56の外周には全開位置P、全閉位置Q、原点位置Rが存在する。全開位置Pとは、ピンチバルブ1が全開状態のときに、クラッチ部材56と当接部材36が当接しているクラッチ部材56上の位置である(図6A参照)。全閉位置Qとは、ピンチバルブ1が全閉状態のときに、駆動軸52の中心軸と当接部材36との間の距離が最短距離になる、当接部材36と対向するクラッチ部材56上の位置であり、最も全開位置Pに近い位置である(図6B参照)。すなわち、ピンチバルブ1が全開状態から全閉状態になった直後の位置である。原点位置Rとは、全閉位置Qから全開位置Pとは周方向反対側に更に移動した点である(図6C参照)。上述のように、原点位置Rは開度センサ53によって検出される。全閉位置Qから更に移動した点に原点位置Rを設けることによって、ピンチバルブ1が確実に全閉状態になったことを検出することができる。ここで、クラッチ部材56の周方向領域を、流路3を閉止する閉工程において弁軸6に作用する第一領域と、流路3を開放する開工程において弁軸6に作用する第二領域と、に区分する。このとき、第一領域は全開位置Pから原点位置Rまでの部分であり、第二領域は原点位置Rから全開位置Pまでの部分である。図6A〜図6Dに示すように、第一領域の形状と第二領域の形状は異なっている。
第二領域は主に第一半円形部59から形成され、曲率が第二半円形部60のものから第一半円形部59のものへと徐々に変化する曲率移行部分63を含む。曲率移行部分63の曲率半径は原点位置Rから全開位置Pに近づくにつれて大きくなっている。第二領域では、ピンチバルブ1の開度が大きくなるにつれてカム部54と当接部材36との当接点と駆動軸52の中心軸との間隔が大きくなる。そして、ピンチバルブ1が全開状態のときに、カム部54と当接部材36との当接点と駆動軸52の中心軸との間隔が最も大きくなる(図6D、図6A参照)。
第一領域のピンチバルブ1が全開状態から全閉状態に移行するときに作用する部分、すなわち、全開位置Pから全閉位置Qまでの間は、主にカム部54上に形成された平面61であり、平面61はクラッチ部58となる。このようにすると、クラッチ部材56の単位回転角度当たりの当接部材36の移動量を大きくすることができ、閉工程に要する時間を短くすることができる。第一の実施の形態では、閉工程において、カム部54の平面61は当接部材36と接触せず、互いに離間している。すなわち、閉工程には、クラッチ部58の作用によって、クラッチ部材56が当接部材36と離間する離間工程が含まれている。
離間工程では、当接部材36とクラッチ部材56とが離間するため、回転型電動機55から弁軸6に伝達される動力が遮断され、コイルバネ28のみが挟圧子5を管体4に向けて駆動する。このとき、開工程においてコイルバネ28にかけられていた圧縮力が解放されるので、コイルバネ28は挟圧子5を瞬間的に管体4側に駆動することができ、挟圧子5は内部管体41を押圧して流路3を瞬間的に閉止することができる。また、圧縮されたコイルバネ28の復元力を利用することによって、簡単かつコンパクトな構成で流路3を瞬間的に閉止することができる。全閉位置Qでは、当接部材36とカム部54は互いに離間している。従って、全閉位置Qでは、挟圧子5はコイルバネ28のみに付勢されているので、コイルバネ28の付勢力を内部管体41に効果的に伝えることができ、流路3を確実に閉止することができる。また、コイルバネ28を用いて内部管体41を押圧することによって、内部管体41を確実に変形させることができるので、流路3を確実に閉止することができる。全閉位置Qから原点位置Rまでの間では、全閉位置Qと同様にピンチバルブ1を全閉状態に維持している。
次に、第一の実施の形態に係るピンチバルブ1の主要な作用について説明する。
まず、流路3を閉止してピンチバルブ1を全開状態から全閉状態にする閉工程について説明する。図2に示すように、全開状態のピンチバルブ1では、クラッチ部材56のカム部54は当接部材36に当接し、当接部材36を持ち上げている。このとき、弁軸6の下端部に設けられ、弁体として作用する挟圧子5は管体4から離間している。全開状態では、コイルバネ28は挟圧子5と第二本体部14とによって圧縮されている。ここでクラッチ部材56が当接部材36に当接し、回転型電動機55の動力が機械的に弁軸6に伝達されているので、コイルバネ28の復元力が大きくても、コイルバネ28を圧縮させながら弁軸6を持ち上げることができる。ピンチバルブ1が全開状態であること、つまりクラッチ部材56が当接部材36と全開位置Pにおいて当接していることは、開度センサ53が円筒部材57の一方の面取り部に当接することによって検出されている。ここで、駆動軸52には、弁軸6を介してコイルバネ28の付勢力がかかっているが、駆動軸52は駆動軸支持部材34に支持されているので、駆動軸52が傾くことを防ぐことができる。
ピンチバルブ1の外部に設置され、ピンチバルブ1の開度を制御する制御部(図示せず)から電気信号が回転型電動機55に伝わると、回転型電動機55が作動する。回転型電動機55が作動すると駆動軸52が回転し、駆動軸52に連結されているクラッチ部材56が駆動軸52と同じ回転速度で回転する。クラッチ部材56が回転すると、カム部54と当接部材36との当接部が全開位置Pを離れ、カム部54の第一領域を移動する。クラッチ部材56がさらに回転すると、当接部材36はクラッチ部材56のクラッチ部58である平面部にさしかかり、クラッチ部材56から離間する。離間工程では、回転型電動機55から弁軸6に伝達される動力が遮断されるので、開工程においてコイルバネ28を圧縮していた力が解放される。すなわち、弁軸6はクラッチ部材56に支持されなくなる。このとき、コイルバネ28は挟圧子5を管体4側に付勢し、挟圧子5を瞬間的に駆動する。そして、挟圧子5は内部管体41を押圧し、内部管体41の内周面を密着させて流路3を瞬間的に閉止させ、ピンチバルブ1を全閉状態とする。このとき、当接部材36はクラッチ部材56の全閉位置Qの上に位置している。全閉位置Qでは、クラッチ部材56と当接部材36は離間している。従って、全閉位置Qでは、挟圧子5はコイルバネ28のみに付勢されているので、コイルバネ28の復元力を効果的に内部管体41に作用させることができる。
クラッチ部材56がさらに回転すると、当接部材36がクラッチ部材56の全閉位置Qの上から原点位置Rの上に位置する。全閉位置Qから原点位置Rまでの間は、全閉位置Qと同様に、当接部材36とクラッチ部材56とが離間している。すなわち、電気駆動手段7が作動しているものの、ピンチバルブ1は全閉状態に保たれている。当接部材36の位置を全閉位置Qから原点位置Rにすることによって、次の工程である開工程に速やかに移行することができる。なお、ピンチバルブ1が全閉状態であり、かつ、当接部材36が原点位置Rに位置していることは、開度センサ53が円筒部材57の他方の面取り部(図示せず)に当接することによって検出されている。ピンチバルブ1が全閉状態であり、かつ、当接部材36が原点位置Rに位置していることが検出されると、回転型電動機55の作動が停止する。
次に、流路3を開放してピンチバルブ1を全閉状態から全開状態にする開工程について説明する。図3に示されるように、ピンチバルブ1が全閉状態であるときに、制御部(図示せず)から出力された電気信号が回転型電動機55に伝わると、回転型電動機55が作動する。回転型電動機55が作動すると、駆動軸52とともにクラッチ部材56が回転し、当接部材36が原点位置Rから離れる。さらにクラッチ部材56が回転すると、カム部54と当接部材36が当接し、当接部材36が第二領域を移動する。クラッチ部材56がさらに回転すると、カム部54と当接部材36との当接部が駆動軸52の中心軸から遠ざかるように移動し、当接部材36が持ち上げられる。このとき、当接部材36に連動して挟圧子5が持ち上げられる。挟圧子5はコイルバネ28を圧縮させながら管体4から離間する方向に移動する。クラッチ部材56がさらに回転すると、カム部54と当接部材36との当接部が全開位置Pに到達し、ピンチバルブ1が全開状態となる。ピンチバルブ1が全開状態であることは、開度センサ53が円筒部材57の一方の面取り部に当接することによって検出されている。ピンチバルブ1が全開状態であることが検出されると、回転型電動機55の作動が停止する。
第一の実施の形態では、開工程において、クラッチ部材56は常に当接部材36に当接し、コイルバネ24を圧縮させながら挟圧子5を持ち上げているので、電気駆動手段7のみが挟圧子5を、流路3を開放する方向に駆動している。閉工程では、クラッチ部材56が弁軸6と離間する離間工程を含み、離間工程では、弾性体であるコイルバネ28のみが弁体である挟圧子5を、流路3を閉止する方向に駆動している。このようにすることによって、空気駆動手段を用いなくても、瞬間的に流路3を閉止することができる。また、空気駆動手段を使用していないので、圧縮空気供給源を必要とせず、汎用な用力条件でピンチバルブ1を使用することができる。
第一の実施の形態では、閉工程に要する時間が開工程に要する時間よりも短い。このようにすると、速やかに流路3を閉止する必要があるときに好適に使用することができる。速やかに流路3を閉止する必要があるときとしては、例えば、ピンチバルブ1の上流側で検出された異物が下流側に流出するのを確実に防ぐときなどの緊急的に流路を遮断する場合が挙げられる。また、第一の実施の形態では、ピンチバルブ1の開閉機構として、汎用的な回転型電動機55とコイルバネ28を用いているので、開閉機構の構成を簡単にするとともに、コンパクトにすることができる。
第一の実施の形態では、第一領域のクラッチ部58である平面部61は当接部材36に対して全体的に非接触になるように設計されているが、平面部をクラッチ部58の半径方向外側に向かって屈曲させて、当接部材36と接触するように設計してもよい。このようにすると、閉工程に要する時間を開工程に要する時間よりも短くしつつ、挟圧子5が管体4側に急激に駆動されることを防ぐことができるので、管体4の損傷を抑えることができる。第一の実施の形態では、第一領域にクラッチ部58である平面部61を形成することによって、クラッチ部材56と当接部材36とを離間しているが、平面部61をクラッチ部材56の半径方向内側にへこむ凹曲面にしてもよい。また、第一の実施の形態では、開工程および閉工程において、クラッチ部材56の回転速度は一定であるが、閉工程のときだけ回転速度を速めてもよい。このようにすると、閉工程に要する時間をさらに短縮することができる。
第一の実施の形態では、クラッチ部材56が全開位置Pおよび原点位置Rにあることを検出するのにリミットスイッチを用いたが、光センサなど各種の公知のセンサを用いることができる。また、部品点数を減らすために、ひとつの開度センサ53で開度を検出してもよい。例えば、全開状態を開度センサ53で検知していたら、開度センサ53が非検知状態になってから所定時間が経過したときの状態を全閉状態として検知してもよい。また、第一の実施の形態では、カム部54として板カムを用いたが、板カムの他に、円筒カム、溝カム、端面カムなどの公知のカムを用いることができる。また、カム部54の形状は自由に設計することができる。例えば、流路3を比例的にゆっくりと開放したい場合は、第二領域のクラッチ部材56と当接部材36との当接部の軌跡を長くするとともに、第二領域上のクラッチ部材56と当接部材36との接点と、駆動軸52の中心線との垂線が比例的に長くなるように設計すればよい。
―第二の実施の形態―
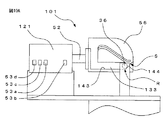
以下、図7〜10Bを参照して、第二の実施の形態について説明する。図7は第二の実施の形態に係るバルブの斜視図である。図8は第二の実施の形態に係るバルブの全開状態を示す縦断面図である。図9は第二の実施の形態に係るバルブの全開状態を示す縦断面図である。図10Aおよび10Bは第二の実施の形態に係るバルブのクラッチ部材と当接部材の位置関係の変化を示す概略図である。第二の実施の形態が第一の実施の形態と異なる点は、主に、電気駆動手段7の構成である。なお、図7〜10Bでは第一の実施の形態と同様の作用や機能を有する構成要素には図1〜6と同一の符号を付し、以下では第一の実施の形態との相違点を主に説明する。
以下、図7〜10Bを参照して、第二の実施の形態について説明する。図7は第二の実施の形態に係るバルブの斜視図である。図8は第二の実施の形態に係るバルブの全開状態を示す縦断面図である。図9は第二の実施の形態に係るバルブの全開状態を示す縦断面図である。図10Aおよび10Bは第二の実施の形態に係るバルブのクラッチ部材と当接部材の位置関係の変化を示す概略図である。第二の実施の形態が第一の実施の形態と異なる点は、主に、電気駆動手段7の構成である。なお、図7〜10Bでは第一の実施の形態と同様の作用や機能を有する構成要素には図1〜6と同一の符号を付し、以下では第一の実施の形態との相違点を主に説明する。
第二の実施の形態に係るバルブ101は、バルブ本体2と、弁体105を有する弁軸6と、電気駆動手段7と、を有する。
第二の実施の形態において、バルブ本体2は第一本体部13と、第二本体部14と、第三本体部102と、を有する。第一本体部13は、ポリテトラフルオロエチレン(以下、PTFEと記す)製である。図7〜9に示すように、第一本体部13は略四角柱形状に形成されている。第一本体部13の上部中央には、第一本体部13の上面に開口を有する空間である弁室20が形成されている。弁室20の底面中央には、第一本体部13の一方の側面に開口を有する第一流路103と連通している連通孔が形成されている。また、弁室20の底面外周縁には、第一本体部13の他方の側面に開口を有し、第一流路103と同じ流路軸線を有する第二流路104に連通している連通孔が形成されている。弁室20の底面中央に形成された連通孔の開口周縁部には、弁体105が圧接および離間する弁座106が形成されている。
第二の実施の形態において、第二本体部14は、PTFE製のである。図7〜図9に示すように、第二本体部14は略四角柱形状に形成されている。第二本体部14は第一本体部13の上部に配置され、ダイヤフラム押さえ107を挟み込むように固定されている。第二本体部14の上部中央には、弾性体であるコイルバネ28を収容する空間であるシリンダ部113が形成されている。シリンダ部113の底部には、軸部35の下部と断面形状が略同一形状である連通孔が形成されている。
第二の実施の形態において、第三本体部102はSUS製である。図7〜9に示すように、第三本体部102は矩形板形状に形成されている。第三本体部102は第二本体部14の上面に配置され、第二本体部14を挟み込むように第一本体部13に固定されている。第三本体部102の端部には軸部35の上部と断面形状が略同一形状である連通孔が形成されている。
第二の実施の形態において、ダイヤフラム押さえ107は、PTFE製である。ダイヤフラム押さえ107の中央には、軸部35の下部と断面形状が略同一形状である貫通孔が形成されている。ダイヤフラム押さえ107の下面には、支持面110がダイヤフラム押さえ107の貫通孔に向かって上方に傾斜するすり鉢形状に形成されている。支持面110は、バルブ101が全開状態にあるときに、第二本体部14側のダイヤフラム109の面と全面的に当接することによって、ダイヤフラム109が破損することを防止している。
第二の実施の形態において、弁軸6はSUS製である。図7〜9に示すように、弁軸6は軸部35、バネ受け部108、分岐部111および当接部材36を有している。弁軸6の軸部35は断面矩形状に形成されている。軸部35の上部には、U字形状に分岐した分岐部111が形成されている。分岐部111のそれぞれの上端部から、弁軸6に直交しかつ互いに向かう方向に延びるように当接部材36が形成されている。向かい合う二つの当接部材36は互いに離間して形成され、当接部材36の端部には弁軸6に直交する方向に互いに向かって伸縮するプランジャ112が配置されている。弁軸6の中央部には径方向に突出した円板形状のバネ受け部108が形成されている。バネ受け部108は第二本体部14のシリンダ部113の内周面に摺動自在に形成されている。バネ受け部108の上面は、第三本体部102の下面とともにコイルバネ28を挟持している。軸部35の下端部には、弁体105が接続されている。
第二の実施の形態において、弁体105はPTFE製である。弁体105の外周には径方向に延設されたダイヤフラム109が一体的に形成されている。
第二の実施の形態において、電気駆動手段7は直線方向の動力を出力する直線型電動機121と、直線型電動機121の動力を弁軸6に伝達または遮断するクラッチ部材56と、を有する。図7〜10Bに示すように、直線型電動機121はスペーサ145を介して第三本体部102の上面に位置決めされた状態で固定されている。直線型電動機121は直線方向に伸縮し動力をクラッチ部材56に伝達する駆動軸52を有する。駆動軸52の先端部にはフランジ部122が形成されている。直線型電動機121には、クラッチ部材56上の、全開位置P、全閉位置Q、原点位置Rおよび直線型電動機121の作動方向を駆動軸52が伸びる方向から縮む方向に反転させる位置である反転位置Sのそれぞれの位置に当接部材36が達したときの駆動軸52の位置を検出するための開度センサ53(全開センサ53a、全閉センサ53b、原点センサ53c、反転センサ53d)が装着されている。ここで、第二の実施の形態では、原点位置Rとは、バルブ101が全閉状態のときに、第三本体部102と当接部材36との間の距離が最短距離になるときの、当接部材36が位置するクラッチ部材56上の位置であり、かつ、最も反転位置Sに近い位置である。このように原点位置Rを定めることによって、迅速に後述するバルブ101の開工程に移行することができる。開度センサ53は磁気センサであり、それぞれの開度センサ53が駆動軸52の位置を検出することによって、バルブ101の開度を検出している。
第二の実施の形態において、クラッチ部材56はポリエチレン(以下、PEと記す。)製の直動カムである。クラッチ部材56は駆動軸52のフランジ部122に固定されている。クラッチ部材56は、主に駆動軸52が伸びるときに弁軸6に作用する第一ブロック部131と、主に駆動軸52が縮むときに弁軸6に作用する第二ブロック部132と、を有する。第一ブロック部131と第二ブロック部132は、第一ブロック部131の下面の幅方向中心から第二ブロック部132の上面の幅方向中心に向かって垂下突設された板形状の第一リブ133によって、一体的に連結されている。
主に図8に示すように、第一ブロック部131の駆動軸52側の端部には垂直面134が形成され、駆動軸52とは反対側に第一傾斜面135が形成され、最上面には略水平に拡がる第一平面136が形成されている。第一傾斜面135と第一平面136は第一曲面137によって滑らかに接続され、第一平面136と垂直面134は第二曲面138によって滑らかに接続されている。第一ブロック部131の上面の幅方向中心から板形状の第二リブ139が垂直に突設され、第二リブ139は第一リブ133と一体的に接続している。第二リブ139の側面には当接部材36のプランジャ112を受容する誘導溝140が形成されている。誘導溝140は第一傾斜面135、第一曲面137、第一平面136、第二曲面138に沿って形成されている。なお、全開位置Pは第一平面136上に位置している。
主に図8に示すように、第二ブロック部132上面の駆動軸52側の端部には、上方向に突出する第一壁部141が形成され、駆動軸52とは反対側の端部には上方向に突出する第二壁部142が形成されている。第一壁部141と第二壁部142の間は第二平面143によって接続されている。第一壁部141の駆動軸52側の壁面は駆動軸52のフランジ部122に連結固定されている。第二壁部142の駆動軸52側の壁面には第二傾斜面144が形成されている。全閉位置Qは第二平面143上の駆動軸52側の端部に位置している。原点位置Rは第二平面143上の駆動軸52とは反対側の端部に位置している。反転位置Sは第二傾斜面144上に位置している。ここで、第二の実施の形態では、クラッチ部材56の当接部材36が通過する領域を、流路3を閉止する閉工程において弁軸6に作用する第一領域と、流路3を開放する開工程において弁軸6に作用する第二領域と、に区分する。このとき、第一領域は全開位置Pから原点位置Rまでの部分に相当し、第二領域は原点位置Rから全開位置Pまでの部分に相当する。図8〜図10Bに示すように、第一領域の形状と第二領域の形状は異なっている。
次に、第二の実施の形態に係るバルブ101の主要な作用について説明する。まず、バルブ101の閉工程について説明する。図8に示すように、全開状態のバルブ101では、クラッチ部材56は全開位置Pにおいて当接部材36に当接し、当接部材36を持ち上げている。このとき、弁軸6の下端部に設けられている弁体105は弁座106から離間している。全開状態ではコイルバネ28はバネ受け部108と第三本体部102とによって圧縮されている。バルブ101が全開状態であることは全開センサ53aによって検出されている。次いで、電気駆動手段7が制御部(図示せず)から電気信号を受けると、直線型電動機121は駆動軸52を伸ばす。駆動軸52が伸びると、クラッチ部材56が駆動軸52とは反対側に移動する。このとき、当接部材36は、プランジャ112を誘導溝140に遊嵌させながら、クラッチ部材56の第一平面136から第二曲面138上を移動する。さらに駆動軸52が伸びると、当接部材36は第二曲面138から垂直面134に向けて移動する。このとき、当接部材36は第二曲面138をバルブ本体2側に徐々に下降するので、弁軸6および弁軸6に接続されている弁体105は、コイルバネ28に付勢されながら、閉止方向に徐々に下降する。
当接部材36が垂直面134にさしかかり、クラッチ部材56がさらに移動すると、当接部材36が垂直面134の駆動軸52側に外れ、当接部材36とクラッチ部材56は離間する。ここで、垂直面134はクラッチ部58として作用している。すなわち、閉工程には、クラッチ部58の作用によって、クラッチ部材56が当接部材36と離間する離間工程が含まれる。このとき、プランジャ112は誘導溝140からは外れているが、第二リブ139の側面に摺接している。プランジャ112が第二リブ139に摺接していても、クラッチ部材56は当接部材36に直線型電動機121の動力を伝達できないことから、当接部材36とクラッチ部材56は実質的に離間しているといえる。
当接部材36とクラッチ部材56が離間すると、弁体105はコイルバネ28の付勢力のみで駆動され、瞬間的にバルブ101を閉止する方向に下降する。そして、弁体105が弁座106に着座し、コイルバネ28の付勢力によって押圧され、流路3が閉止されると、弁軸6の下降が止まり、バルブ101が全閉状態となる。これにより、空気駆動手段を用いなくても、瞬間的に流路3を閉止することができる。バルブ101が全閉状態のときは、図9に示すように、当接部材36は第二平面143の全開位置Q上に隙間をあけて位置している。このとき、制御部は、全閉センサ53bが全閉状態になったときの駆動軸52の位置を検出することによって、バルブ101が全閉状態になったことを確認している。
制御部(図示せず)は、全閉センサ53bからの出力を受けると、当接部材36をクラッチ部材56の原点位置Rに配置するために、直線型電動機121の駆動軸52を縮める。クラッチ部材56が駆動軸52側に移動すると、当接部材36は第二平面143から隙間を開けた状態で、プランジャ112を第一リブ133に摺動させながら、第二平面143の原点位置Rに向かって移動する。当接部材36が原点位置Rの上に位置したことを原点センサ53cが検出すると、直線型電動機121が停止する。このとき、クラッチ部材56と当接部材36は離間しており、クラッチ部材56は当接部材36に直線型電動機121の動力を伝達するのを遮断しているため、バルブ101は全閉状態から変化しない。
次に、開工程について説明する。図10Aに示すように、当接部材36が原点位置Rの上に位置している状態において、電気駆動手段7が制御部から電気信号を受けると、直線型電動機121は駆動軸52を縮める。そして、駆動軸52が縮まると、クラッチ部材56が移動することによって、当接部材36は、プランジャ112を第一リブ133に摺接させながら、クラッチ部材56の第二傾斜面144に向かって移動する。さらに駆動軸52が縮まると、当接部材36は第二傾斜面144上を駆動軸52とは反対側に移動する。このとき、当接部材36は第二傾斜面144上をバルブ本体2とは反対側に徐々に上昇するので、弁軸6はコイルバネ28を圧縮させながらバルブ101を開放する方向に徐々に上昇する。そして、プランジャ112が誘導溝140に遊嵌され、図10Bに示すように当接部材36が反転位置Sの上に位置したことを反転センサ53dが検出すると、制御部は直線型電動機121の作動を、駆動軸52を縮める方向から伸ばす方向に反転させる。
直線型電動機121の作動方向が反転すると、駆動軸52が伸びる方向にクラッチ部材56が移動する。そして、クラッチ部材56が移動すると、当接部材36はプランジャ112を誘導溝140に遊嵌させながら第一傾斜面135に向かって移動する。さらに駆動軸52が伸びると、当接部材36が第一傾斜面135に到達し、当接部材36は、プランジャ112を誘導溝140に遊嵌させながら、第一傾斜面135から第一曲面137を経て第一平面136に向かって移動する。このとき、当接部材36は第一傾斜面135および第一曲面137を徐々に昇るので、弁軸6はコイルバネ28を圧縮させながら徐々に持ち上げられる。そして、さらに駆動軸52が伸び、当接部材36が第一平面136に到達し、全開位置Pに到達すると、弁体105の上昇が止まり、バルブ101が全開状態となる。ここで、バルブ101が全開状態になったことを全開センサ53aが検出すると、直線型電動機121が停止する。
―第三の実施の形態―
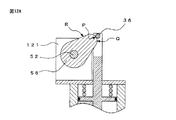
以下、図11〜12Cを参照して、第三の実施の形態について説明する。図11は第三の実施の形態に係るピンチバルブの斜視図である。図12A〜12Cは第三の実施の形態に係るピンチバルブのクラッチ部材と当接部材の位置関係の変化を示す概略図である。第三の実施の形態が第二の実施の形態と異なる点は主に、電気駆動手段7の機構である。なお、図11、12では第一の実施の形態または第二の実施の形態と同様の作用や機能を有する構成要素には図1〜10と同一の符号を付し、以下では第一の実施の形態との相違点を主に説明する。
以下、図11〜12Cを参照して、第三の実施の形態について説明する。図11は第三の実施の形態に係るピンチバルブの斜視図である。図12A〜12Cは第三の実施の形態に係るピンチバルブのクラッチ部材と当接部材の位置関係の変化を示す概略図である。第三の実施の形態が第二の実施の形態と異なる点は主に、電気駆動手段7の機構である。なお、図11、12では第一の実施の形態または第二の実施の形態と同様の作用や機能を有する構成要素には図1〜10と同一の符号を付し、以下では第一の実施の形態との相違点を主に説明する。
第三の実施の形態に係るバルブ201は、バルブ本体2と、弁体(図示せず)を有する弁軸6と、電気駆動手段7とを有する。
第三の実施の形態において、バルブ本体2は、第一本体部13と第二本体部14と第三本体部102とを有し、第三本体部102はSUS製である。図11、12に示すように、第三本体部102は平面L字形板形状に形成されている。第一本体部13および第二本体部14から離れている第三本体部102の一方の端部には、回転型電動機55が固定されている。第三本体部102の他方の端部には軸部35の上部と略同一形状を有する連通孔が形成されている。第三本体部102のL字形の屈曲部の外縁にはセンサ支持部材33が連結固定されている。センサ支持部材33には光センサであり開度センサ53である、全開センサ53a、全閉センサ53bおよび原点センサ53cが装着されている。開度センサ53は、クラッチ部材56が回転することによって、当接部材36がクラッチ部材56の全開位置P、全閉位置Qおよび原点位置Rに到達したことをそれぞれ検出する。
第三の実施の形態において、弁軸6はSUS製である。図11、12に示すように、弁軸6の軸部35の上端部には、分岐部111および当接部材36が形成されている。分岐部111はU字形状に形成されている。分岐部111の上端部には、弁軸6の軸線に直交する方向にこれら上端部の間で延びる当接部材36が形成されている。
第三の実施の形態において、電気駆動手段7は回転方向の動力を出力する回転型電動機55と、回転型電動機55の動力を弁軸6に伝達または遮断するクラッチ部材56と、を有する。図11、12に示すように、回転型電動機55は駆動軸52を有する。駆動軸52の先端部には、クラッチ部材56が固定されている。また、駆動軸52のさらに先端部には、開度センサ53を作用させる遮光板202a〜cが装着されている。
第三の実施の形態において、クラッチ部材56はSUS製の平面卵形状の板カムである。クラッチ部材56の卵形状の膨らんでいる側の部分には駆動軸52を挿入して接続する貫通孔が形成されている。クラッチ部材56の卵形状のすぼまっている側の部分(以下、頂部203と称する。)の周側面が当接部材36に接触する。クラッチ部材56の頂部203の周側面には、全開位置P、全閉位置Qおよび原点位置Rが存在する。第三の実施形態では、第一領域は全開位置Pから原点位置Rまでの部分に相当し、第二領域は原点位置Rから全開位置Pまでの部分に相当する。図12A〜12Cに示すように、第一領域の形状と第二領域の形状は異なっている。第三の実施の形態において、他の構成は第一の実施の形態または第二の実施の形態と同様であるので説明を省略する。また、バルブ201の内部構造は第二の実施の形態と同様であるので説明を省略する。
次に、第三の実施の形態に係るバルブ201の主要な作用について説明する。まず、閉工程について説明する。図12Aに示すように、全開状態のバルブ201では、クラッチ部材56は全開位置Pにおいて当接部材36に当接し、当接部材36を持ち上げている。バルブ201が全開状態であることは全開センサ53aによって検出されている。電気駆動手段7が制御部(図示せず)から電気信号を受けると、回転型電動機55は駆動軸52を、図12A〜12Cにおいて反時計回りに回転させる。駆動軸52が回転すると、クラッチ部材56が駆動軸52とともに回転し、当接部材36は、全開位置Pから全閉位置Qに向かってクラッチ部材56の第一領域上を移動する。そして、さらに駆動軸52が回転すると、当接部材36とクラッチ部材56は互いの係合が解除されて離間する。第三の実施の形態では、図12Bに示すように、クラッチ部材56の周側面において、当接部材36がクラッチ部材56から離間するときの位置が全閉位置Qとなる。このとき、第二領域のうち全閉位置Qの近傍部分がクラッチ部58として作用している。このように、閉工程には、クラッチ部58の作用によって、クラッチ部材56が当接部材36と離間する離間工程が含まれる。
当接部材36とクラッチ部材56が離間すると、クラッチ部材56は回転型電動機55の動力が当接部材36を経て弁軸6に伝達されるのを遮断する。そのため、弁軸6は、バルブ本体2内に存在するコイルバネ28の付勢力のみで、瞬間的にバルブ201を閉止する方向に下降する。そして、バルブ本体2内において、弁体(図示せず)が弁座(図示せず)に着座すると、弁軸6の下降が止まり、バルブ201が全閉状態となる(図12B参照)。このとき、全閉センサ53bが遮光板202bを検出する。
制御部は全閉センサ53bからの出力を受けると、当接部材36をクラッチ部材56の原点位置Rに配置するために、さらに駆動軸52を回転させる。ここで、第三の実施の形態では、クラッチ部材56と当接部材36とが再び当接したときの位置が原点位置Rとなる。駆動軸52が回転すると、クラッチ部材56は当接部材36から離間した状態で駆動軸52とともに回転する。駆動軸52がさらに回転すると、頂点部203が当接部材36に近づき、クラッチ部材56が当接部材36に当接する。すなわち、図12Cに示すように、当接部材36が原点位置Rに当接する。そして、原点センサ53cが遮光板202cを検出し、回転型電動機55が停止する。当接部材36が全閉位置Qを離れ、原点位置Rに当接するまでの間は、回転型電動機55の動力が当接部材36に伝達されておらず、バルブ201は全閉状態である。
次に、開工程について説明する。図12Cに示すように、当接部材36が原点位置Rと当接している状態において、電気駆動手段7が制御部から電気信号を受けると、回転型電動機55は駆動軸52を、図12Cにおいて反時計回り方向に回転させる。そして、駆動軸52が回転すると、クラッチ部材56が駆動軸52とともに回転し、当接部材36が、原点位置Rから全開位置Pに向かって第二領域を移動する。このとき、クラッチ部材56の頂部203はバルブ本体2とは反対側に移動するので、当接部材36はクラッチ部材56と係合して持ち上げられることによってバルブ本体2とは反対側に上昇する。さらに駆動軸52が回転すると、当接部材36が全開位置Pに到達し、バルブ201が全開状態となる(図12A参照)。そして、全開センサ53aが遮光板202aを検出し、回転型電動機55が停止する。
本発明において、クラッチ部材56として各種のカムを用いているが、カムの代わりに、ラックアンドピニオンや歯車、ネジなどの公知の機械要素にクラッチ部58を備えたものを、クラッチ部材56として用いることができる。また、本発明において、クラッチ部材56と当接部材36は互いに直接作用しているが、クラッチ部材56と当接部材36との間には減速機や方向転換機を配置することができる。
また、本発明に係るバルブにおいて、クラッチ部材56を上下反対方向に配置して、弾性体(コイルバネ)を、流路を開放する方向に弁軸を付勢するように配置することにより、開工程に離間工程を含ませることができ、それによりバルブの流路を瞬間的に開放することができる。言い換えれば、上述のようにバルブを構成することによって、開工程に要する時間を閉工程に要する時間よりも短くすることができる。一例として、図13〜14Cに、本発明の第三の実施の形態に係るバルブの変形例を示す。本変形例に係るバルブ1では、コイルバネ28は、弁軸6のバネ受け部108の下面と第二本体部14のシリンダ部113の底面との間で挟持されている。本変形例では、クラッチ部材56の周方向領域において、第一領域は全閉位置Qから全開位置Pまでの部分に相当し、第二領域は全開位置Pから全閉位置Qまでの部分に相当する。図14A〜図14Cに示すように、第一領域の形状と第二領域の形状は異なっている。
本変形例において、全閉状態のピンチバルブ1では、クラッチ部材56が当接部材36を全閉位置Qで押圧している(図14A参照)。そして、開工程において、回転型電動機55の駆動軸52を第三の実施の形態とは逆方向(図14Aでは時計回り)に回転させて、クラッチ部材56を回転させると、当接部材36が全閉位置Qから全開位置Pに向かってクラッチ部材56の第一領域上を移動する。そして、当該当接部が全開位置Pに到達すると、当接部材36とクラッチ部材56は互いの係合が解除されて離間する。すると、弁軸6が、バルブ本体2内に存在するコイルバネ28の付勢力のみによって、瞬間的にバルブ201を開放する方向に上昇する(図14B参照)。このとき、第一領域の全開位置Pの近傍部分がクラッチ部58として作用している。このように、第三の実施の形態の変形例において、開工程には、クラッチ部58の作用によって、クラッチ部材56が当接部材36と離間する離間工程が含まれる。
本変形例において、さらにクラッチ部材56を回転させると、クラッチ部材56が当接部材36に原点位置Rにおいて当接する(図14C参照)。さらに閉工程において、当接部材36が原点位置Rに位置している状態で、クラッチ部材56を回転させると、当接部材36が原点位置Rから全閉位置Qに向かってクラッチ部材56の第二領域上を移動する。そして、当接部材36が全閉位置Qに到達すると、バルブ201が全閉状態になる(図14A参照)。
本発明において、バルブ本体2、弁軸6、弁体105、コイルバネ28、当接部材36、クラッチ部材56などの各種構成部品は、各種構成部品に求められる特性を満たす材料であれば、金属、プラスチック、ガラス、陶器などの公知の材料を使用することができる。好適な材料としては、ポリ塩化ビニル、ポリビニリデンフルオロライド、テトラフルオロエチレン・パーフルオロアルキルビニルエーテル共重合体、SUSなどが好ましい。また、本発明において、管体4、弁体105などの各種構成部品は、各種構成部品に求められる特性を満たす材料であれば、ゴム、プラスチックなどの公知の材料を使用することができる。好適な材料としては、パーフロロエラストマー、フッ素ゴム、エチレンプロピレンジエンゴム、ニトリルゴムなどのエラストマー、PP、PE、ポリ塩化ビニル、テトラフルオロエチレン・パーフルオロアルキルビニルエーテル共重合体などのプラスチックが挙げられる。
なお、上記の第一の実施の形態〜第三の実施の形態の構成要素を任意に組み合わせてバルブを構成してもよい。すなわち、本発明の特徴および機能を実現できる限り、本発明は実施の形態のバルブに限定されない。
1 ピンチバルブ
2 バルブ本体
3 流路
4 管体
5 挟圧子(弁体)
6 弁軸
7 電気駆動手段
11 本体部
12 蓋部
13 第一本体部
14 第二本体部
28 コイルバネ
36 当接部材
53 開度センサ
55 回転型電動機
56 クラッチ部材
101 バルブ
102 第三本体部
121 直線型電動機
201 バルブ
P 全開位置
Q 全閉位置
R 原点位置
S 反転位置
2 バルブ本体
3 流路
4 管体
5 挟圧子(弁体)
6 弁軸
7 電気駆動手段
11 本体部
12 蓋部
13 第一本体部
14 第二本体部
28 コイルバネ
36 当接部材
53 開度センサ
55 回転型電動機
56 クラッチ部材
101 バルブ
102 第三本体部
121 直線型電動機
201 バルブ
P 全開位置
Q 全閉位置
R 原点位置
S 反転位置
Claims (7)
- 流路を有するバルブ本体と、
前記流路を開放または閉止する弁体と、
前記弁体を駆動する電気駆動手段と、
前記電気駆動手段の動力を前記弁体に伝達する当接部材を備える弁軸と、
前記電気駆動手段に備えられ、前記電気駆動手段の動力を、前記当接部材を介して前記弁軸に機械的に伝達するクラッチ部材と、
前記弁体を流路閉止方向または流路開放方向のどちらか一方の方向に駆動する弾性体と、
を備え、
前記流路を閉止する閉工程または前記流路を開放する開工程のどちらか一方の工程では、前記クラッチ部材が前記当接部材から離間する離間工程を含み、
前記離間工程では、前記弾性体のみが前記弁体を駆動し、
前記閉工程または前記開工程の他方の工程では、前記クラッチ部材が常に前記当接部材に当接し、前記電気駆動手段のみが前記弁体を駆動し、
前記一方の工程に要する時間が前記他方の工程に要する時間よりも短いことを特徴とする、
バルブ。 - 前記クラッチ部材は、前記一方の工程において前記クラッチ部材が前記当接部材と離間させるクラッチ部を含む第一領域と、前記他方の工程において前記電気駆動手段の動力により前記弁軸を駆動する第二領域と、を有し、
第一領域の形状と第二領域の形状が異なっていることを特徴とする、
請求項1に記載のバルブ。 - 前記流路が全閉または全開している状態において、前記クラッチ部材は前記電気駆動手段の動力の前記弁軸への伝達が遮断されていることを特徴とする、
請求項1または請求項2に記載のバルブ。 - 前記電気駆動手段が、動力を前記クラッチ部材に伝達する駆動軸を備え、回転運動を動力として出力する回転型電動機であり、
前記回転型電動機は、前記駆動軸が前記流路と同じ方向に延びるように配置されていることを特徴とする、
請求項1乃至請求項3のいずれか1項に記載のバルブ。 - 前記電気駆動手段が回転運動を動力として出力する回転型電動機であり、
前記クラッチ部材が板カムであり、
前記クラッチ部が平面部であることを特徴とする、
請求項2に記載のバルブ。 - 前記電気駆動手段が回転運動を動力として出力する回転型電動機であり、
前記クラッチ部材が板カムであり、
前記クラッチ部が前記クラッチ部材の内側にくぼむ凹曲面であることを特徴とする、
請求項2に記載のバルブ。 - 前記バルブ本体は弾性を有する管体を備え、
前記流路は前記管体の内部に形成され、
前記弁体は前記管体を押圧しまたは押圧を解除することによって前記流路を閉止または開放することを特徴とする、
請求項1乃至請求項6のいずれか1項に記載のバルブ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016052550A JP2017166582A (ja) | 2016-03-16 | 2016-03-16 | バルブ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016052550A JP2017166582A (ja) | 2016-03-16 | 2016-03-16 | バルブ |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017166582A true JP2017166582A (ja) | 2017-09-21 |
Family
ID=59908850
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016052550A Pending JP2017166582A (ja) | 2016-03-16 | 2016-03-16 | バルブ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2017166582A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019193386A (ja) * | 2018-04-23 | 2019-10-31 | ニプロ株式会社 | 動作状態判別装置 |
| CN110487914A (zh) * | 2018-05-15 | 2019-11-22 | 谢丽芳 | 一种信号发生装置 |
| JP2019210964A (ja) * | 2018-05-31 | 2019-12-12 | 旭有機材株式会社 | ピンチバルブ |
-
2016
- 2016-03-16 JP JP2016052550A patent/JP2017166582A/ja active Pending
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019193386A (ja) * | 2018-04-23 | 2019-10-31 | ニプロ株式会社 | 動作状態判別装置 |
| JP7003826B2 (ja) | 2018-04-23 | 2022-01-21 | ニプロ株式会社 | 動作状態判別装置 |
| CN110487914A (zh) * | 2018-05-15 | 2019-11-22 | 谢丽芳 | 一种信号发生装置 |
| JP2019210964A (ja) * | 2018-05-31 | 2019-12-12 | 旭有機材株式会社 | ピンチバルブ |
| JP7202081B2 (ja) | 2018-05-31 | 2023-01-11 | 旭有機材株式会社 | ピンチバルブ |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2017166580A (ja) | 流体制御装置 | |
| JP5528090B2 (ja) | 配管装置 | |
| JP2017166582A (ja) | バルブ | |
| JP6212463B2 (ja) | 小型電磁弁 | |
| CN103097789A (zh) | 流体控制装置 | |
| US12181069B2 (en) | Arbitrary directional touch switch | |
| JP5612906B2 (ja) | 流量調整弁 | |
| JP6355366B2 (ja) | ピンチバルブ | |
| JP4994082B2 (ja) | 配管部材 | |
| JP2008190576A (ja) | マニホールド弁 | |
| JP4744319B2 (ja) | ダイヤフラム弁 | |
| JP4925936B2 (ja) | サックバックバルブ | |
| JP2005344637A (ja) | ポンプ装置 | |
| JP2007100842A (ja) | 自動給水装置 | |
| JP5467066B2 (ja) | 手動弁 | |
| JP6723550B2 (ja) | ダイヤフラム弁 | |
| JP2020063820A (ja) | 弁装置および電磁弁 | |
| KR102339441B1 (ko) | 다이아프램의 고정 구조, 그것을 구비한 다이아프램 펌프 및 밸브 장치, 그리고 다이아프램의 고정 방법 | |
| JP2017166581A (ja) | ピンチバルブ | |
| CN217006186U (zh) | 一种新型单触点水压力开关 | |
| JP4221206B2 (ja) | ダイアフラム | |
| JP2020165490A (ja) | ダイヤフラムバルブ | |
| JP2009144753A (ja) | ダイヤフラムバルブ | |
| JPH0544872A (ja) | 弁の開閉表示機構 | |
| JP2008138830A (ja) | マニホールド弁 |