JP2017169405A - モータ制御装置及び操舵制御装置 - Google Patents
モータ制御装置及び操舵制御装置 Download PDFInfo
- Publication number
- JP2017169405A JP2017169405A JP2016054175A JP2016054175A JP2017169405A JP 2017169405 A JP2017169405 A JP 2017169405A JP 2016054175 A JP2016054175 A JP 2016054175A JP 2016054175 A JP2016054175 A JP 2016054175A JP 2017169405 A JP2017169405 A JP 2017169405A
- Authority
- JP
- Japan
- Prior art keywords
- power supply
- ground
- abnormality
- motor
- current
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/12—Monitoring commutation; Providing indication of commutation failure
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P27/00—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L3/00—Electric devices on electrically-propelled vehicles for safety purposes; Monitoring operating variables, e.g. speed, deceleration or energy consumption
- B60L3/0023—Detecting, eliminating, remedying or compensating for drive train abnormalities, e.g. failures within the drive train
- B60L3/0046—Detecting, eliminating, remedying or compensating for drive train abnormalities, e.g. failures within the drive train relating to electric energy storage systems, e.g. batteries or capacitors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L3/00—Electric devices on electrically-propelled vehicles for safety purposes; Monitoring operating variables, e.g. speed, deceleration or energy consumption
- B60L3/0023—Detecting, eliminating, remedying or compensating for drive train abnormalities, e.g. failures within the drive train
- B60L3/0069—Detecting, eliminating, remedying or compensating for drive train abnormalities, e.g. failures within the drive train relating to the isolation, e.g. ground fault or leak current
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L3/00—Electric devices on electrically-propelled vehicles for safety purposes; Monitoring operating variables, e.g. speed, deceleration or energy consumption
- B60L3/04—Cutting off the power supply under fault conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L3/00—Electric devices on electrically-propelled vehicles for safety purposes; Monitoring operating variables, e.g. speed, deceleration or energy consumption
- B60L3/12—Recording operating variables ; Monitoring of operating variables
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/50—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells
- B60L50/60—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells using power supplied by batteries
- B60L50/61—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells using power supplied by batteries by batteries charged by engine-driven generators, e.g. series hybrid electric vehicles
- B60L50/62—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells using power supplied by batteries by batteries charged by engine-driven generators, e.g. series hybrid electric vehicles charged by low-power generators primarily intended to support the batteries, e.g. range extenders
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D15/00—Steering not otherwise provided for
- B62D15/02—Steering position indicators ; Steering position determination; Steering aids
- B62D15/025—Active steering aids, e.g. helping the driver by actively influencing the steering system after environment evaluation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0457—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such
- B62D5/046—Controlling the motor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0457—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such
- B62D5/0481—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such monitoring the steering system, e.g. failures
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0457—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such
- B62D5/0481—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such monitoring the steering system, e.g. failures
- B62D5/0484—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such monitoring the steering system, e.g. failures for reaction to failures, e.g. limp home
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0457—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such
- B62D5/0481—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such monitoring the steering system, e.g. failures
- B62D5/0487—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such monitoring the steering system, e.g. failures detecting motor faults
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P25/00—Arrangements or methods for the control of AC motors characterised by the kind of AC motor or by structural details
- H02P25/16—Arrangements or methods for the control of AC motors characterised by the kind of AC motor or by structural details characterised by the circuit arrangement or by the kind of wiring
- H02P25/22—Multiple windings; Windings for more than three phases
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P27/00—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage
- H02P27/04—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage
- H02P27/06—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using DC to AC converters or inverters
- H02P27/08—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using DC to AC converters or inverters with pulse width modulation
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P31/00—Arrangements for regulating or controlling electric motors not provided for in groups H02P1/00 - H02P5/00, H02P7/00 or H02P21/00 - H02P29/00
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/14—Electronic commutators
- H02P6/16—Circuit arrangements for detecting position
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/28—Arrangements for controlling current
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/64—Electric machine technologies in electromobility
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/70—Energy storage systems for electromobility, e.g. batteries
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/7072—Electromobility specific charging systems or methods for batteries, ultracapacitors, supercapacitors or double-layer capacitors
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Life Sciences & Earth Sciences (AREA)
- Sustainable Development (AREA)
- Sustainable Energy (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
- Control Of Electric Motors In General (AREA)
- Control Of Ac Motors In General (AREA)
- Power Steering Mechanism (AREA)
Abstract
【課題】電源を冗長化する場合であっても信頼性の低下を抑制すること。【解決手段】操舵ECU30は、2つの駆動回路50,60にそれぞれ異なる外部電源43,44が接続される2つの制御系統31,32が構成されている。各駆動回路50,60の低電位側とそれぞれに対応する各外部電源43,44の低電位側とは、2つの制御系統31,32毎に各電源グランド線GL1,GL2を介して独立して接続されている。また、各駆動回路50,60の低電位側は、内部グランド33を介して共通に接続されている。また、各電源グランド線GL1,GL2と内部グランド33との間には、各電源グランド電流値Ignd1,Ignd2をそれぞれ検出する2つの電流検出部54,64が設けられている。そして、操舵ECU30は、各電流検出部54,64の検出結果に基づいて、グランド異常を検出する各マイコン55,65を備えるようにしている。【選択図】図2
Description
本発明は、モータ制御装置及び操舵制御装置に関する。
例えば、特許文献1には、外部電源を電力源として、モータに駆動電力を供給する2つの制御系統(制御手段やインバータ)を備えるモータ制御装置が開示されている。このモータ制御装置では、2つの制御系統と、外部電源とをそれぞれ接続するための電力供給路についても2つ備えるようにしている。これにより、特許文献1に記載のモータ制御装置では、制御系統の冗長化が図られている。
モータ制御装置における冗長化では、制御系統のそれぞれに対して異なる外部電源を接続することによって、駆動電力の電力源を冗長化することも考えられる。すなわち、例えば、モータ制御装置に対しては異なる外部電源が独立して接続され、モータ制御装置の各制御系統に対しては異なる外部電源の低電位側が独立したグランドである電源グランド(所謂、フレームグランド)を介して接続されるようにする。なお、各制御系統の低電位側は、各制御系統間での通信を可能にするために、共通のグランドである内部グランド(所謂、シグナルグランド)を介して接続されるようにする。
ただし、上記例において、電源グランドの何れかでショート等の異常が生じた場合には、残りの正常な電源グランドに対して、各制御系統が内部グランドを通じて接続されるようになる。すなわち、異常が生じている電源グランドに接続されていた制御系統は、残りの正常な電源グランドを通じて正常動作することができる。そのため、駆動電力の電力源を冗長化する場合には、モータ制御装置の動作を外部から監視していたとしても、電源グランドの異常を検出することが困難であり、モータ制御装置の信頼性を低下させる懸念がある。その他、モータ制御装置は、車両の進行方向を自動的に変化させる自動運転を可能にする車両に搭載されることによって、車両用の操舵制御装置として用いられる場合もある。こうした操舵制御装置においても上記例のように駆動電力の電力源を冗長化する場合には、電源グランドの異常の検出が遅れてしまい、例えば、自動運転の機能を停止させようとしてもそのタイミングが遅れてしまう可能性があり、操舵制御装置の信頼性を低下させる懸念がある。
本発明は、こうした実情に鑑みてなされたものであり、その目的は、駆動電力の電力源を冗長化する場合であっても信頼性の低下を抑制できるモータ制御装置及び操舵制御装置を提供することにある。
上記課題を解決するモータ制御装置は、外部電源を電力源として、駆動電力を制御対象であるモータの巻線に供給するように動作する複数の駆動回路を備え、複数の駆動回路にはそれぞれ異なる外部電源が接続されることによって、複数の制御系統を構成するものである。複数の制御系統について、各駆動回路の低電位側とそれぞれに対応する外部電源の低電位側とは、制御系統毎に独立したグランドである複数の電源グランドを介して接続されるとともに、各駆動回路の低電位側は、それぞれ共通のグランドである内部グランドを介して接続されており、複数の電源グランドと前記内部グランドとの間には、複数の電源グランドの電流であるグランド電流をそれぞれ検出する複数の電流検出部が設けられている。そして、このモータ制御装置は、複数の電流検出部の検出結果に基づいて、複数の制御系統における各電源グランドの異常であるグランド異常を検出する異常検出部を備えるようにしている。
上記構成において、仮にグランド異常が生じると、残りの正常な電源グランドに対して各制御系統が接続されるようになってしまうこと、すなわち異常が生じている電源グランドに接続されていた制御系統が残りの正常な電源グランドを通じて正常動作することができてしまう。これにより、グランド異常が生じると電源グランドの電流であるグランド電流にも特徴的な状態が現れる。
すなわち、上記構成によれば、複数の電源グランドの何れかでショート等の異常が生じた場合に、複数の電流検出部の検出結果に基づいて、グランド電流の特徴的な状態を検出することができるようになる。また、複数の電流検出部は、複数の電源グランドと内部グランドとの間にそれぞれ設けられているので、複数の電源グランドの個々に対してグランド電流の特徴的な状態を検出することができる。これにより、モータ制御装置の電流検出部を監視することによって、電源グランドの異常を好適に検出することができ、異常が生じている電源グランドに接続されていた制御系統の動作を停止させる等、グランド異常に対して迅速に対処することができる。したがって、駆動電力の電力源を冗長化する場合であってもモータ制御装置の信頼性の低下を抑制することができる。
具体的に、異常検出部は、グランド異常が生じる場合のグランド電流の特徴的な状態を、駆動回路がモータに供給している駆動電力に基づいて、対応する外部電源の電源電流を複数の制御系統毎に演算し、複数の制御系統における各電源電流と、複数の制御系統に対応する各電流検出部の検出結果との差によって検出し、その結果に基づいて、グランド異常を検出したり、複数の制御系統に対応する各電流検出部の検出結果を複数の制御系統の間で比較した結果によって検出し、その結果に基づいて、グランド異常を検出したりするようにする。
上記構成によれば、より高い精度でグランド異常を検出することができる。また、上記の前者の構成によれば、制御系統毎にグランド異常を検出することができるので、駆動回路を制御するための制御部を制御系統毎に設ける場合であれば、制御系統毎の電源グランドのセルフチェック機能の実現の観点で特に有効である。また、上記の後者の構成によれば、複数の制御系統の間での比較結果を用いるため、駆動回路を制御するための制御部を複数の制御系統の間で共通化する構成の実現の観点で特に有効である。
ところで、グランド異常を検出するためには、グランド電流を検出する必要がある。例えば、モータにトルクを発生させる必要がなく、モータに対して実質的に駆動電力が供給されていない場合には、電源グランドの電流を正しく検出することができない。
そこで、上記モータ制御装置において、各駆動回路は、異常検出部がグランド異常を検出するタイミングにおいて、モータに対してdp座標系のd軸電流を印加することが望ましい。
例えば、永久磁石同期電動機(PMSM)では、モータの制御量を制御する際、モータに発生させるトルクに対する消費電力を最小化するために、dp座標系のうちのモータのトルクの発生に寄与しないd軸電流を零とする制御が行われる。この場合、d軸電流の印加は、消費電力を増加させるのみでモータのトルクの発生に寄与せず、実施されたとしてもモータ20の駆動の状況を変化させる影響が少ないと言える。そのため、上記構成によれば、モータにトルクを発生させる必要がない状況も含めて、モータの駆動の状況に関係なくグランド異常を検出することができる。
また、上記モータ制御装置において、異常検出部がグランド異常を検出するタイミングには、モータに発生させるトルクが零の状況が含まれていることが望ましい。
上記構成によれば、例えば、モータに発生させるトルクが零の状況であるモータ制御装置の起動処理時、すなわちモータを駆動させる準備段階において、グランド異常を検出することができるようになる。この場合には、モータが駆動される準備段階でグランド異常を検出することができ、モータ制御装置の信頼性の向上に寄与することができる。
上記構成によれば、例えば、モータに発生させるトルクが零の状況であるモータ制御装置の起動処理時、すなわちモータを駆動させる準備段階において、グランド異常を検出することができるようになる。この場合には、モータが駆動される準備段階でグランド異常を検出することができ、モータ制御装置の信頼性の向上に寄与することができる。
このようなモータ制御装置は、外部指令値を含む電気信号が外部から入力されることに基づいて、転舵輪の転舵角を変化させる動力を付与するようにモータの制御量を制御する操舵制御装置として用いられる場合もある。
上記構成によれば、操舵制御装置は、車両の進行方向を自動的に変化させる自動運転等の高度運転支援を可能にする。すなわち、自動運転を可能にする場合であっても、複数の電流検出部によってグランド異常を好適に検出することができるようになる。これにより、電源グランドに異常があった場合には、即座に自動運転の機能を停止させる等、グランド異常に対して迅速に対処することができ、グランド異常に対する対処が遅れてしまうことを抑制することができる。したがって、駆動電力の電力源を冗長化する場合であっても操舵制御装置の信頼性の低下を抑制することができる。
本発明によれば、駆動電力の電力源を冗長化する場合であっても信頼性の低下を抑制することができる。
(第1実施形態)
以下、モータ制御装置及び操舵制御装置の第1実施形態を説明する。
図1に示すように、車両Aには、後述する操舵機構2に対して車両の進行方向を自動的に変化させる動力を付与するように構成されている自動操舵装置1が搭載されている。
以下、モータ制御装置及び操舵制御装置の第1実施形態を説明する。
図1に示すように、車両Aには、後述する操舵機構2に対して車両の進行方向を自動的に変化させる動力を付与するように構成されている自動操舵装置1が搭載されている。
操舵機構2は、ユーザーにより操作されるステアリングホイール10と、ステアリングホイール10と固定されるステアリングシャフト11とを備えている。ステアリングシャフト11は、ステアリングホイール10と連結されたコラムシャフト11aと、コラムシャフト11aの下端部に連結されたインターミディエイトシャフト11bと、インターミディエイトシャフト11bの下端部に連結されたピニオンシャフト11cとを有している。ピニオンシャフト11cの下端部は、ラックアンドピニオン機構13を介してラックシャフト12に連結されている。ステアリングシャフト11の回転運動は、ラックアンドピニオン機構13を介してラックシャフト12の軸方向の往復直線運動に変換される。この往復直線運動が、ラックシャフト12の両端にそれぞれ連結されたタイロッド14を介して、左右の転舵輪15にそれぞれ伝達されることにより、これら転舵輪15の転舵角が変化する。
ステアリングホイール10と固定されたコラムシャフト11aの途中には、操舵機構2に対して動力として付与する操舵力の発生源であるモータ20を有する操舵力付与機構3が設けられている。例えば、モータ20は、表面磁石同期電動機(SPMSM)であり、3相(U,V,W)の駆動電力に基づいて回転する3相ブラシレスモータである。モータ20の回転軸21は、減速機構22を介してコラムシャフト11aに連結されている。操舵力付与機構3は、モータ20の回転軸21の回転力を減速機構22を介してコラムシャフト11aに伝達する。このコラムシャフト11aに付与されるモータ20のトルク(回転力)が操舵力となり、左右の転舵輪15の転舵角を変化させる。
モータ20には、モータ20の制御量である電流量を制御することによって、モータ20の駆動を制御する操舵ECU30が接続されている。操舵ECU30は、車両Aに設けられる各種のセンサの検出結果(電気信号)に基づいて、モータ20の駆動を制御する。各種のセンサとしては、例えば、トルクセンサ40、回転角センサ41、及び車速センサ42がある。トルクセンサ40はコラムシャフト11aに設けられ、回転角センサ41はモータ20に設けられている。トルクセンサ40は、ユーザーのステアリング操作によりステアリングシャフト11に生じる操舵トルクThを検出する。回転角センサ41は、モータ20の回転軸21の回転角度θmを検出する。車速センサ42は、車両Aの走行速度である車速Vを検出する。本実施形態において、操舵ECU30はモータ制御装置及び操舵制御装置の一例である。
操舵ECU30には、車両Aに搭載されるバッテリ等の第1外部電源43及び第2外部電源44がそれぞれ接続されている。各外部電源43,44は、イグニッション信号IGが入力されることによって操舵ECU30への給電を開始する。また、操舵ECU30には、車載される自動操舵ECU4が接続されている。自動操舵ECU4は、自動運転等の高度運転支援として、車両の走行状態に応じて車両の進行方向を自動的に変化させる自動操舵の制御を操舵ECU30に対して指示する。
自動操舵ECU4には、車両の走行状態を示す車両情報θconが入力される。車両情報θconは、カーナビ等のGPSや車速センサ42やその他の車載センサ(カメラ、距離センサ、ヨーレートセンサ、レーザー等)や車路間通信により認識される車両の周辺環境を含む車両の走行状態を示す各種情報である。自動操舵ECU4は、車両情報θconに基づき生成する自動操舵の制御に用いる外部指令値θs*(電気信号)を操舵ECU30に対して出力する。
なお、操舵ECU30には、図示しない切替スイッチが接続されている。切替スイッチは、ユーザーにより操作され、操舵ECU30が自動操舵の制御を実行する自動操舵モードを設定するか否かの切り替えを指示する。操舵ECU30は、自動操舵モードの設定が指示される間、自動操舵に関わる自動操舵制御を実行し、ユーザーによるステアリング操作の介入操作があれば自動操舵制御と並行してステアリング操作を補助する介入操舵制御を実行する。また、操舵ECU30は、自動操舵モードの設定が指示されない間(設定しないことが指示される間)、自動操舵制御を実行しないで、ステアリング操作を補助するEPS制御を実行する。この場合、操舵ECU30は、自動操舵ECU4が出力する外部指令値θs*を無効化する。
次に、自動操舵装置1の電気的構成について説明する。
図1及び図2に示すように、操舵ECU30は、モータ20のうちの第1系統用コイルC1への駆動電力を供給する第1制御系統31と、モータ20のうちの第2系統用コイルC2への駆動電力を供給する第2制御系統32とを備えている。
図1及び図2に示すように、操舵ECU30は、モータ20のうちの第1系統用コイルC1への駆動電力を供給する第1制御系統31と、モータ20のうちの第2系統用コイルC2への駆動電力を供給する第2制御系統32とを備えている。
第1制御系統31には、第1系統用コイルC1に供給する駆動電力の電力源として、第1外部電源43がコネクタ31aを通じて接続されている。第1制御系統31と、第1外部電源43の低電位側とは、コネクタ31bを通じて接続される電源グランドである第1電源グランド線GL1を介して接続されている。また、第1制御系統31と、第1系統用コイルC1とは、各コネクタ31c,31d,31eを通じて接続されている。
第2制御系統32には、第2系統用コイルC2に供給する駆動電力の電力源として、第2外部電源44がコネクタ32aを通じて接続されている。第2制御系統32と、第2外部電源44の低電位側とは、コネクタ32bを通じて接続される電源グランドである第2電源グランド線GL2を介して接続されている。各電源グランド線GL1,GL2は、共に車両AのボディBoに接続されるグランド(所謂、フレームグランド)であり、それぞれの電位がほぼ同一である。また、第2制御系統32と、第2系統用コイルC2とは、各コネクタ32c,32d,32eを通じて接続されている。
このように、各制御系統31,32には、駆動電力の電力源としてそれぞれ異なる外部電源が、それぞれ独立した電源グランド線を介して接続されている。すなわち、本実施形態では、モータ20の駆動に関わる制御系統の冗長化が図られているとともに、モータ20に供給する駆動電力の電力源の冗長化が図られている。なお、各系統用コイルC1,C2は、それぞれの各相のコイルがモータ20の周に沿って系統毎に交互に配置されたり、それぞれの各相のコイルがモータ20の周に沿って纏めて並べて配置されたり、同一ティースにモータ20の径方向に積層されて配置されたりする。
ここで、各制御系統31,32の構成について詳しく説明する。
図2に示すように、第1制御系統31は、第1系統用コイルC1に電力を供給するように動作する第1駆動回路50を有している。第1駆動回路50は、トランジスタに分類される複数のMOS電界効果トランジスタ(スイッチング素子)を有している。第1駆動回路50は、上下一対のスイッチング素子3組の直列回路を基本単位(スイッチングアーム)とし、各スイッチングアームを並列に接続してなる周知の3相インバータとして構成されている。一対のスイッチング素子の上流側は第1外部電源43の高電位側と第1系統用コイルC1との間を開閉するとともに、一対のスイッチング素子の下流側は第1外部電源43の低電位側と第1系統用コイルC1との間を開閉する。なお、第1駆動回路50とモータ20との間には、第1系統用コイルC1の実電流として、各相電流値Iu1,Iv1,Iw1をそれぞれ検出する電流センサ51aが設けられている。また、第1駆動回路50とモータ20との間には、第1系統用コイルC1への印加電圧として、各相電圧値Vu1,Vv1,Vw1をそれぞれ検出する電圧センサ51bが設けられている。例えば、電流センサ51aや電圧センサ51bは、シャント抵抗を用いたものである。
図2に示すように、第1制御系統31は、第1系統用コイルC1に電力を供給するように動作する第1駆動回路50を有している。第1駆動回路50は、トランジスタに分類される複数のMOS電界効果トランジスタ(スイッチング素子)を有している。第1駆動回路50は、上下一対のスイッチング素子3組の直列回路を基本単位(スイッチングアーム)とし、各スイッチングアームを並列に接続してなる周知の3相インバータとして構成されている。一対のスイッチング素子の上流側は第1外部電源43の高電位側と第1系統用コイルC1との間を開閉するとともに、一対のスイッチング素子の下流側は第1外部電源43の低電位側と第1系統用コイルC1との間を開閉する。なお、第1駆動回路50とモータ20との間には、第1系統用コイルC1の実電流として、各相電流値Iu1,Iv1,Iw1をそれぞれ検出する電流センサ51aが設けられている。また、第1駆動回路50とモータ20との間には、第1系統用コイルC1への印加電圧として、各相電圧値Vu1,Vv1,Vw1をそれぞれ検出する電圧センサ51bが設けられている。例えば、電流センサ51aや電圧センサ51bは、シャント抵抗を用いたものである。
第1外部電源43の高電位側と、第1駆動回路50(一対のスイッチング素子の上流側)との間には、第1外部電源43から第1駆動回路50への給電のオンオフを切り替える第1電源リレー52が設けられている。第1電源リレー52は、通常オン状態に維持される。第1制御系統31において、第1電源グランド線GL1でショート等のグランド異常が生じた場合、第1電源リレー52はオフ状態へ切り替えられる。このオフ状態では、第1駆動回路50への給電が遮断され、第1外部電源43から第1系統用コイルC1への給電も遮断される。なお、第1駆動回路50と第1外部電源43との間には、第1外部電源43から供給される駆動電力を平滑化する平滑コンデンサ53が設けられている。
第1駆動回路50において、一対のスイッチング素子の下流側である低電位側は、操舵ECU30のベースとなる基板上に設けられる内部グランド33(所謂、シグナルグランド)に接続されている。
また、第1駆動回路50の低電位側と、コネクタ32bとの間には、第1電源グランド線GL1の実電流として、第1電源グランド電流値Ignd1を検出する第1電流検出部54が設けられている。すなわち、第1電流検出部54は、内部グランド33と第1電源グランド線GL1との間に設けられている。第1電流検出部54は、電流センサ51aと同様の電流センサからなり、例えば、シャント抵抗を用いたものである。本実施形態における第1電源グランド電流値Ignd1は、第1制御系統31において、グランド異常が生じていない場合、第1外部電源43の第1電源電流値Iba1とほぼ同一(実際には各種部品による公差を有する)である。
また、第1制御系統31は、第1駆動回路50及び第1電源リレー52の動作を制御する第1マイコン(マイクロコンピュータ)55を有している。第1マイコン55には、外部指令値θs*、操舵トルクTh、車速V、回転角度θm、各相電流値Iu1,Iv1,Iw1、各相電圧値Vu1,Vv1,Vw1、及び第1電源グランド電流値Ignd1が入力される。第1マイコン55は、PWM信号等の第1モータ制御信号Sm1を出力する。第1モータ制御信号Sm1は、第1駆動回路50を構成する各スイッチング素子のオンduty比を規定するものである。なお、第1マイコン55は、第1外部電源43に接続されているとともに、第1駆動回路50の低電位側と同様、内部グランド33に接続されている。
また、図2に示すように、第2制御系統32は、基本的に第1制御系統31と同一構造をなしており、第2系統用コイルC2に電力を供給するように動作する第2駆動回路60を有している。第2駆動回路60とモータ20との間には、第2系統用コイルC2の実電流として、各相電流値Iu2,Iv2,Iw2をそれぞれ検出する電流センサ61aが設けられている。また、第2駆動回路60とモータ20との間には、第2系統用コイルC2への印加電圧として、各相電圧値Vu2,Vv2,Vw2をそれぞれ検出する電圧センサ61bが設けられている。例えば、電流センサ61aや電圧センサ61bは、シャント抵抗を用いたものである。
第2外部電源44の高電位側と、第2駆動回路60(一対のスイッチング素子の上流側)との間には、第2外部電源44から第2駆動回路60への給電のオンオフを切り替える第2電源リレー62が設けられている。第2電源リレー62のオフ状態では、第2駆動回路60への給電が遮断され、第2外部電源44から第2系統用コイルC2への給電も遮断される。なお、第2駆動回路60と第2外部電源44との間には、第2外部電源44から供給される駆動電力を平滑化する平滑コンデンサ63が設けられている。
第2駆動回路60の低電位側は、第1駆動回路50の低電位側及び第1マイコン55と同様、内部グランド33に接続されている。すなわち、各駆動回路50,60の低電位側は、それぞれ共通の内部グランド33を介して接続されている。
また、第2駆動回路60の低電位側と、コネクタ32bとの間には、第2電源グランド線GL2の実電流として、第2電源グランド電流値Ignd2を検出する第2電流検出部64が設けられている。すなわち、第2電流検出部64は、内部グランド33と第2電源グランド線GL2との間に設けられている。第2電流検出部64は、電流センサ61aと同様の電流センサからなり、例えば、シャント抵抗を用いたものである。本実施形態における第2電源グランド電流値Ignd2は、第2制御系統32において、グランド異常が生じていない場合、第2外部電源44の第2電源電流値Iba2とほぼ同一(実際には各種部品による公差を有する)である。
また、第2制御系統32は、第2駆動回路60及び第2電源リレー62の動作を制御する第2マイコン(マイクロコンピュータ)65を有している。第2マイコン65には、外部指令値θs*、操舵トルクTh、車速V、回転角度θm、各相電流値Iu2,Iv2,Iw2、各相電圧値Vu2,Vv2,Vw2、及び第2電源グランド電流値Ignd2が入力される。第2マイコン65は、PWM信号等の第2モータ制御信号Sm2を出力する。第2モータ制御信号Sm2は、第2駆動回路60を構成する各スイッチング素子のオンduty比を規定するものである。なお、第2マイコン65は、第2外部電源44に接続されているとともに、第2駆動回路60の低電位側や第1マイコン55等と同様、内部グランド33に接続されている。これにより、各マイコン55,65は、マイコン間通信が可能に構成されている。
次に、各マイコン55,65の機能について詳しく説明する。
図3に示すように、各マイコン55,65は、各モータ制御信号Sm1,Sm2を生成するためのd軸電流指令値Id1*,Id2*及びq軸電流指令値Iq1*,Iq2*を演算する、電流指令値演算部70を有している。また、各マイコン55,65は、電流指令値演算部70を通じて演算されたd軸電流指令値Id1*,Id2*及びq軸電流指令値Iq1*,Iq2*に基づいて、各モータ制御信号Sm1,Sm2を生成してPWM信号として出力する、制御信号生成部71を有している。
図3に示すように、各マイコン55,65は、各モータ制御信号Sm1,Sm2を生成するためのd軸電流指令値Id1*,Id2*及びq軸電流指令値Iq1*,Iq2*を演算する、電流指令値演算部70を有している。また、各マイコン55,65は、電流指令値演算部70を通じて演算されたd軸電流指令値Id1*,Id2*及びq軸電流指令値Iq1*,Iq2*に基づいて、各モータ制御信号Sm1,Sm2を生成してPWM信号として出力する、制御信号生成部71を有している。
なお、各マイコン55,65は、入力及び出力される電気信号が異なる以外、マイコン内では同一処理が実行されるため、以下では、便宜上、第1マイコン55の機能を中心に説明する。ただし、必要な場合には、各マイコン55,65のそれぞれの機能について個別に説明する。
第1マイコン55は、回転角度θmを用いて各相電流値Iu1,Iv1,Iw1をdq座標系に写像することによりd軸電流値Id1及びq軸電流値Iq1を演算する、3相/2相変換部72aを有している。d軸電流値Id1及びq軸電流値Iq1は、dq座標系における第1系統用コイルC1(モータ20)の実電流である。また、第1マイコン55は、回転角度θmを用いて各相電圧値Vu1,Vv1,Vw1をdq座標系に写像することによりd軸電圧値Vd1及びq軸電圧値Vq1を演算する、3相/2相変換部72bを有している。d軸電圧値Vd1及びq軸電圧値Vq1は、dq座標系における第1系統用コイルC1(モータ20)への印加電圧である。
なお、第2マイコン65における3相/2相変換部72aは、回転角度θmを用いて各相電流値Iu2,Iv2,Iw2をdq座標系に写像することによりd軸電流値Id2及びq軸電流値Iq2を演算する。d軸電流値Id2及びq軸電流値Iq2は、dq座標系における第2系統用コイルC2(モータ20)の実電流である。また、第2マイコン65における3相/2相変換部72bは、各相電圧値Vu2,Vv2,Vw2をdq座標系に写像することによりd軸電圧値Vd2及びq軸電圧値Vq2を演算する。d軸電圧値Vd2及びq軸電圧値Vq2は、dq座標系における第2系統用コイルC2(モータ20)への印加電圧である。
また、第1マイコン55は、操舵ECU30において、グランド異常が生じた場合に、その旨を検出する第1異常検出部73を有している。なお、第2マイコン65は、操舵ECU30において、グランド異常が生じた場合に、その旨を検出する第2異常検出部74を有している。本実施形態において、各異常検出部73,74は、グランド異常の検出時、当該グランド異常が各制御系統31,32の何れで生じているかについても検出する。
電流指令値演算部70は、外部指令値θs*、又は操舵トルクTh及び車速Vを用いて目標トルクを演算し、演算した目標トルクに基づいてd軸電流指令値Id1*及びq軸電流指令値Iq1*を演算する。
具体的に、電流指令値演算部70は、外部指令値θs*が入力される場合、変換された回転角度指令値θm*、及びその時に回転角センサ41で検出される回転角度θmに基づいて、モータ20に発生させる目標トルクを演算する。また、電流指令値演算部70は、操舵トルクThが入力される場合、操舵トルクTh及び車速Vに基づいて、モータ20に発生させるべきアシストトルクの目標トルクを演算する。すなわちアシストトルクによっては、ユーザーのステアリング操作が補助される。
なお、自動操舵ECU4は、自動操舵制御を実行する場合、車両情報θconに基づいて、車両Aの挙動を制御する上で最適な外部指令値θs*を生成する目標回転角演算を所定周期毎に実行する。外部指令値θs*は、転舵輪15の転舵角に換算可能な回転角、例えば、ステアリングホイール10の回転角である操舵角θsの自動操舵制御における目標値である。そして、自動操舵ECU4は、生成した外部指令値θs*を操舵ECU30の各マイコン55,65に所定周期毎に出力する。外部指令値θs*に基づいては、各マイコン55,65がモータ20の駆動を制御する。なお、各マイコン55,65は、所定周期毎に入力する外部指令値θs*を、所定の変換係数を用いて、モータ20の回転角度θmに関わる回転角度指令値θm*に変換する。このように、転舵輪15の転舵角に換算可能な回転角とモータ20の回転角度θmとは、相関があり、互いに変換(換算)することのできる状態量である。
そして、電流指令値演算部70は、自動操舵制御の実行中、介入操舵制御を実行しない場合、回転角度指令値θm*及び回転角度θmに基づく目標トルクを演算する。一方、電流指令値演算部70は、自動操舵制御と並行して介入操舵制御を実行する場合、回転角度指令値θm*及び回転角度θmに基づく目標トルク、及び操舵トルクThに基づく目標トルクを加算した結果を目標トルクとする。また、電流指令値演算部70は、EPS制御を実行する場合、操舵トルクThに基づく目標トルクを演算する。
なお、各制御系統31,32は、同期動作(動作の位相が一致)するようになっており、各系統用コイルC1,C2の各相に対しては基本的に同じタイミングで同じだけの駆動電力が供給されるようになっている。すなわち、目標トルクとしては、各マイコン55,65で同一の目標トルクが演算され、各系統用コイルC1,C2で合わせて目標トルク(100%)となるように目標トルクが演算される。具体的に、各系統用コイルC1,C2において、モータ20に実際に発生させるトルクのうちの半分(50%)ずつのトルクを発生させるための目標トルクが演算される。そして、電流指令値演算部70は、演算したd軸電流指令値Id1*及びq軸電流指令値Iq1*を各減算器71a,71bにそれぞれ出力する。d軸電流指令値Id1*及びq軸電流指令値Iq1*は、dq座標系における第1系統用コイルC1(モータ20)の供給電流の目標値に対応する。
また、3相/2相変換部72aは、演算したd軸電流値Id1及びq軸電流値Iq1を各減算器71a,71bにそれぞれ出力する。そして、減算器71aは、d軸電流指令値Id1*及びd軸電流値Id1の偏差ΔId1をフィードバック演算部(以下、「F/B演算部」という)71cに出力する。F/B演算部71cは、d軸電流値Id1をd軸電流指令値Id1*に追従させるべく偏差ΔId1に基づくフィードバック制御を実行することにより、d軸電圧指令値Vd1*を生成し、生成したd軸電圧指令値Vd1*を制御信号生成部71に出力する。
また、減算器71bは、q軸電流指令値Iq1*及びq軸電流値Iq1の偏差ΔIq1をフィードバック演算部(以下、「F/B演算部」という)71dに出力する。F/B演算部71dは、q軸電流値Iq1をq軸電流指令値Iq1*に追従させるべく偏差ΔIq1に基づくフィードバック制御を実行することにより、q軸電圧指令値Vq1*を生成し、生成したq軸電圧指令値Vq1*を制御信号生成部71に出力する。
制御信号生成部71は、回転角度θmを用いてd軸電圧指令値Vd1*及びq軸電圧指令値Vq1*を三相座標系に写像することにより、三相座標系における各電圧指令値Vu1*,Vv1*,Vw1*を演算する。また、制御信号生成部71は、その演算した各相電圧指令値Vu1*,Vv1*,Vw1*に対応する第1モータ制御信号Sm1を生成し、生成した第1モータ制御信号Sm1を第1駆動回路50に出力する。
また、図3に示すように、第1異常検出部73には、イグニッション信号IGと、第1制御系統31において、第1電源グランド電流値Ignd1、d軸電流値Id1、q軸電流値Iq1、d軸電圧値Vd1、及びq軸電圧値Vq1とが入力される。第1異常検出部73は、d軸電流値Id1、q軸電流値Iq1、d軸電圧値Vd1、及びq軸電圧値Vq1から推定演算される第1電源電流値Iba1と、第1電源グランド電流値Ignd1との差に基づいて、グランド異常を検出し、その結果をグランド異常FLGとして電流指令値演算部70に対して出力する。
また、第2異常検出部74には、イグニッション信号IGと、第2制御系統32において、第2電源グランド電流値Ignd2、d軸電流値Id2、q軸電流値Iq2、d軸電圧値Vd2、及びq軸電圧値Vq2とが入力される。第2異常検出部74は、d軸電流値Id2、q軸電流値Iq2、d軸電圧値Vd2、及びq軸電圧値Vq2から推定演算される第2電源電流値Iba2と、第2電源グランド電流値Ignd2との差に基づいて、グランド異常を検出し、その結果をグランド異常FLGとして電流指令値演算部70に対して出力する。
なお、グランド異常FLGは、グランド異常が生じている場合に出力され、グランド異常が第1制御系統31で生じている場合に「1」が出力され、グランド異常が第2制御系統32で生じている場合に「2」が出力される。
例えば、第1電源グランド電流値Ignd1は、第1制御系統31において、グランド異常が生じていない場合、第1外部電源43の第1電源電流値Iba1とほぼ同一である。一方、第1電源グランド電流値Ignd1は、第1制御系統31において、グランド異常が生じている場合、第1電源グランド線GL1には電流が流れ込まなくなり、第1電源電流値Iba1と比較して小さくなる特徴的な状態となる。また、第1電源グランド電流値Ignd1は、第2制御系統32において、グランド異常が生じている場合、第1電源グランド線GL1には第2制御系統32分の電流が内部グランド33を介して流れ込んでくるので、第1電源電流値Iba1と比較して大きくなる特徴的な状態となる。これは、第2電源グランド電流値Ignd2においても同様である。
すなわち、各異常検出部73,74は、自身が設けられている制御系統に関わる情報のみを用いて、操舵ECU30のグランド異常を検出することができるとともに、グランド異常の検出時、グランド異常が各制御系統31,32の何れで生じているかを検出することができる。
ここで、各異常検出部73,74が実行する異常検出処理について詳しく説明する。なお、各異常検出部73,74は、所定周期毎に以下の処理を繰り返し実行する。各異常検出部73,74は、異常検出処理をそれぞれ別々に実行する。以下では、便宜上、第1異常検出部73が実行する処理を中心に説明し、第2異常検出部74が実行する処理については簡略化して説明する。
図4に示すように、第1異常検出部73は、イグニッション信号IGが入力されたか否かを判定する(S10)。第1異常検出部73は、イグニッション信号IGが入力されていない場合(S10:NO)、異常検出タイミングであるか否かを判定する(S20)。S20にて、第1異常検出部73は、イグニッション信号IGの入力後、第1マイコン55の内部で管理されるタイマに基づいて、定期的(例えば、制御周期の4周期分)に到来する異常検出タイミングであるか否かを判定している。そして、第1異常検出部73は、異常検出タイミングでない場合(S20:NO)、異常検出処理を終了する。
一方、第1異常検出部73は、イグニッション信号IGが入力された場合(S10:YES)、又はイグニッション信号IGが入力されていないが異常検出タイミングである場合(S20:YES)、グランド異常を検出するために異常検出用のd軸電流を印加する(S30)。第1異常検出部73は、イグニッション信号IGが入力された場合、すなわちモータ20を駆動させる準備段階である操舵ECU30の起動処理時に、グランド異常を検出するための各種処理を実行する。また、第1異常検出部73は、イグニッション信号IGの入力後、定期的にグランド異常を検出するための各種処理を実行する。
図3に示すように、S30にて、第1異常検出部73は、d軸電流指令値Id1*に加算されるように、d軸電流指令値Idc*を減算器71aに対して出力し、異常検出用のd軸電流を印加する。これにより、第1制御系統31内に電流が流れておらずその電気回路が動作していない状態であっても、第1制御系統31内に電流が流れてその電気回路が動作している状態を意図的に作り出すことができる。d軸電流指令値Idc*は、グランド異常を検出することができるとして経験的に求められる値に設定される。なお、d軸電流は、表面磁石同期電動機(SPMSM)の制御において、トルクの発生に寄与しない電流であり、高効率駆動の観点で零に制御される。例えば、モータ20に発生させるトルクが零の場合、d軸電流値Id1及びq軸電流値Iq1が共に零であり、第1制御系統31の電気回路が動作していない状態である。この場合、d軸電流を印加すると、モータ20にトルクを発生させることなく第1制御系統31の電気回路が動作している状態となる。この状況は、操舵ECU30の起動処理時や車両Aの直進中が相当する。
同じく、第2異常検出部74は、イグニッション信号IGが入力された場合、すなわち第2マイコン65の起動処理時に、グランド異常を検出するための各種処理を実行する。また、第2異常検出部74は、イグニッション信号IGの入力後、定期的にグランド異常を検出するための各種処理を実行する。また、図3に示すように、第2異常検出部74は、イグニッション信号IGが入力された場合、又はイグニッション信号IGが入力されていないが異常検出タイミングである場合、グランド異常を検出するために異常検出用のd軸電流を印加する。
次に、第1異常検出部73は、第1電源電流値Iba1を演算するとともに、第1電源グランド電流値Ignd1を取得する(S40)。S40にて、第1異常検出部73は、3相/2相変換部72aが出力するd軸電流値Id1及びq軸電流値Iq1と、3相/2相変換部72bが出力するd軸電圧値Vd1及びq軸電圧値Vq1とに基づいて、第1電源電流値Iba1を演算する。ここでは、電源電流値Ibaとd軸電流値Id、q軸電流値Iq、d軸電圧値Vd、及びq軸電圧値Vqとを関係づける以下の式(c1)を利用する。
Iba=(Id・Vd+Iq・Vq)/Vba …(c1)
上記の式(c1)において、Id・Vd+Iq・Vqは、モータに供給している駆動電力(入力電力)であり、Vbaは、外部電源における電源電圧値である。すなわち、第1制御系統31では、モータ20に供給している駆動電力がId1・Vd1+Iq1・Vq1となり、電源電圧値がVba1となる。なお、電源電圧値Vba1は、第1外部電源43に接続されている第1マイコン55が直接検出することができる。また、第2制御系統32では、モータ20に供給している駆動電力がId2・Vd2+Iq2・Vq2となり、電源電圧値がVba2となる。なお、電源電圧値Vba2は、第2外部電源44に接続されている第2マイコン65が直接検出することができる。
上記の式(c1)において、Id・Vd+Iq・Vqは、モータに供給している駆動電力(入力電力)であり、Vbaは、外部電源における電源電圧値である。すなわち、第1制御系統31では、モータ20に供給している駆動電力がId1・Vd1+Iq1・Vq1となり、電源電圧値がVba1となる。なお、電源電圧値Vba1は、第1外部電源43に接続されている第1マイコン55が直接検出することができる。また、第2制御系統32では、モータ20に供給している駆動電力がId2・Vd2+Iq2・Vq2となり、電源電圧値がVba2となる。なお、電源電圧値Vba2は、第2外部電源44に接続されている第2マイコン65が直接検出することができる。
続いて、第1異常検出部73は、上記の式(c1)によって演算された第1電源電流値Iba1と、第1電源グランド電流値Ignd1との差の絶対値(|Iba1−Ignd1|)が閾値α以下であるか否かを判定する(S50)。S50にて、第1異常検出部73は、第1外部電源43から引き出された分の電流が第1電源グランド線GL1に流れ込んでいるか否かを判定する。閾値αは、各制御系統31,32における各種部品による公差を考慮して当該公差分を零に対して増減させた値に設定される。なお、操舵ECU30全体では、実際に各制御系統31,32で合算したモータ入力電力に基づく電流が流れている。ただし、本実施形態では、各制御系統31,32が同期動作していることを考慮して、S50において、各制御系統31,32それぞれのモータ入力電力に基づく電流のみを考慮することとしている。
同じく、第2異常検出部74は、上記の式(c1)を利用して、3相/2相変換部72aが出力するd軸電流値Id2及びq軸電流値Iq2と、3相/2相変換部72bが出力するd軸電圧値Vd2及びq軸電圧値Vq2とに基づいて、第2電源電流値Iba2を演算する。そして、第2異常検出部74は、上記の式(c1)によって演算された第2電源電流値Iba2と、第2電源グランド電流値Ignd2との差の絶対値(|Iba2−Ignd2|)が閾値α以下であるか否かを判定する。
第1異常検出部73は、第1電源電流値Iba1と、第1電源グランド電流値Ignd1との差の絶対値が閾値α以下の場合(S50:YES)、異常検出処理を終了する。この場合、第1異常検出部73は、グランド異常が生じていないことから、異常検出FLGを出力しない。
一方、第1異常検出部73は、第1電源電流値Iba1と、第1電源グランド電流値Ignd1との差の絶対値が閾値αよりも大きい場合(S50:NO)、第1電源電流値Iba1から第1電源グランド電流値Ignd1を減算した結果(Iba1−Ignd1)が零よりも大きいか否かを判定する(S60)。S50:NOの場合、第1異常検出部73は、グランド異常を検出したこととなる。そして、S60にて、第1異常検出部73は、グランド異常が各制御系統31,32の何れで生じているかを特定する。
第1異常検出部73は、第1電源電流値Iba1から第1電源グランド電流値Ignd1を減算した結果が零よりも大きい場合(S60:YES)、第1電源グランド線GL1に第1電源電流値Iba1分の電流が流れ込んでいないことを判定し、グランド異常が第1制御系統31で生じていることを検出する(S70)。この場合、第1異常検出部73は、グランド異常が第1制御系統31で生じていることを示す「1」の異常検出FLGを出力し、第1制御系統異常時フェールを作動させる処理へと移行する。この第1制御系統異常時フェールでは、第1マイコン55が第1電源リレー52をオフ状態へ切り替えるとともに、第1マイコン55が外部指令値θs*を無効化(零)する。
一方、第1異常検出部73は、第1電源電流値Iba1から第1電源グランド電流値Ignd1を減算した結果が零よりも小さい場合(S60:NO)、第1電源グランド線GL1に第2制御系統32分の電流が流れ込んでいることを判定し、グランド異常が第2制御系統32で生じていることを検出する(S80)。この場合、第1異常検出部73は、グランド異常が第2制御系統32で生じていることを示す「2」の異常検出FLGを出力し、第2制御系統異常時フェールを作動させる処理へと移行する。この第2制御系統異常時フェールでは、第1マイコン55が第1電源リレー52をオン状態に維持しつつ、第1マイコン55が外部指令値θs*を無効化(零)する。
同じく、第2異常検出部74は、第2電源電流値Iba2と、第2電源グランド電流値Ignd2との差の絶対値が閾値α以下の場合、グランド異常が生じていないことから、異常検出FLGを出力しない。一方、第2異常検出部74は、第2電源電流値Iba2と、第2電源グランド電流値Ignd2との差の絶対値が閾値αよりも大きい場合、グランド異常を検出したこととして、第2電源電流値Iba2から第2電源グランド電流値Ignd2を減算した結果に基づいて、グランド異常が各制御系統31,32の何れで生じているかを特定する。
そして、第2異常検出部74は、グランド異常が第2制御系統32で生じていることを検出する場合、グランド異常が第2制御系統32で生じていることを示す「2」の異常検出FLGを出力し、第2制御系統異常時フェールを作動させる処理へと移行する。この第2制御系統異常時フェールでは、第2マイコン65が第2電源リレー62をオフ状態へ切り替えるとともに、第2マイコン65が外部指令値θs*を無効化(零)する。一方、第2異常検出部74は、グランド異常が第1制御系統31で生じていることを検出する場合、グランド異常が第1制御系統31で生じていることを示す「1」の異常検出FLGを出力し、第1制御系統異常時フェールを作動させる処理へと移行する。この第1制御系統異常時フェールでは、第2マイコン65が第2電源リレー62をオン状態に維持しつつ、第2マイコン65が外部指令値θs*を無効化(零)する。
このように、第1制御系統異常時フェールでは、第1制御系統31によるモータ20の駆動の制御が停止され、第2制御系統32のみによってモータ20の駆動が制御される状態へと移行する。また、第2制御系統異常時フェールでは、第2制御系統32によるモータ20の駆動の制御が停止され、第1制御系統31のみによってモータ20の駆動が制御される状態へと移行する。なお、何れの状態も、自動操舵制御自体も実行されない状態、すなわちEPS制御が実行される状態である。
以上に説明した本実施形態によれば、以下に示す作用及び効果を奏する。
(1)本実施形態において、仮にグランド異常が生じると、残りの正常な電源グランド線に対して各制御系統が接続されるようになってしまうこと、すなわち異常が生じている電源グランド線に接続されていた制御系統が残りの正常な電源グランド線を通じて正常動作することができてしまう。これにより、グランド異常が生じると各電源グランド電流には特徴的な状態が現れる。
(1)本実施形態において、仮にグランド異常が生じると、残りの正常な電源グランド線に対して各制御系統が接続されるようになってしまうこと、すなわち異常が生じている電源グランド線に接続されていた制御系統が残りの正常な電源グランド線を通じて正常動作することができてしまう。これにより、グランド異常が生じると各電源グランド電流には特徴的な状態が現れる。
すなわち、本実施形態によれば、グランド異常が生じた場合には、各制御系統31,32にそれぞれ設けられている各電流検出部54,64の検出結果に基づいて、各電源グランド電流値Ignd1,Ignd2の特徴的な状態を検出することができるようになる。また、各電流検出部54,64は、各電源グランド線GL1,GL2と内部グランド33との間にそれぞれ設けられているので、各電源グランド線GL1,GL2の個々に対して各電源グランド電流値Ignd1,Ignd2の特徴的な状態を検出することができる。これにより、操舵ECU30の各制御系統31,32の各電流検出部54,64の検出結果を監視することによって、グランド異常を好適に検出することができる。
そして、実際にグランド異常を検出した場合には、第1制御系統異常フェールや第2制御系統異常フェールを作動させることによって、異常が生じている電源グランド線に接続されていた制御系統の動作を停止させるとともに、自動操舵制御自体も実行されてない状態へと移行させ、グランド異常に対して迅速な対処を可能にしている。したがって、駆動電力の電力源を冗長化する場合であってもモータ制御装置及び操舵制御装置としての操舵ECU30の信頼性の低下を抑制することができる。
(2)具体的に、第1異常検出部73は、グランド異常が生じる場合の各電源グランド電流値Ignd1,Ignd2の特徴的な状態を第1電源電流値Iba1と、第1電源グランド電流値Ignd1との差(S50やS60)によって検出し、その結果に基づいて、グランド異常を検出するようにしている。これは、第2異常検出部74においても同様である。これにより、より高い精度でグランド異常を検出することができる。
この場合、各制御系統31,32でそれぞれグランド異常を検出することができるので、本実施形態のように、各駆動回路50,60を制御するためのマイコンを各制御系統31,32でそれぞれ設ける構成において、各制御系統31,32におけるグランド異常のセルフチェック機能の実現の観点で特に有効である。
(3)ところで、グランド異常を検出するためには、各電源グランド線GL1,GL2の電流を検出する必要がある。例えば、モータ20にトルクを発生させる必要がないことから、モータ20に対して実質的に駆動電力が供給されていない場合には、各電源グランド線GL1,GL2の電流を正しく検出することができない。
その点、本実施形態では、グランド異常を検出する場合に、モータ20に対してdp座標系のd軸電流を印加する(S30)ようにしている。
例えば、本実施形態のように、表面磁石同期電動機(SPMSM)では、モータ20の駆動を制御する際、モータ20に発生させるトルクに対する消費電力を最小化するために、dp座標系のうちのモータ20のトルクの発生に寄与しないd軸電流を零とする制御が行われる。この場合、d軸電流の印加は、消費電力を増加させるのみでモータ20のトルクの発生に寄与せず、実施されたとしてもモータ20の駆動の状況を変化させる影響が少ないと言える。そのため、本実施形態によれば、モータ20にトルクを発生させる必要がない状況も含めて、モータ20の駆動の状況に関係なくグランド異常を検出することができる。
例えば、本実施形態のように、表面磁石同期電動機(SPMSM)では、モータ20の駆動を制御する際、モータ20に発生させるトルクに対する消費電力を最小化するために、dp座標系のうちのモータ20のトルクの発生に寄与しないd軸電流を零とする制御が行われる。この場合、d軸電流の印加は、消費電力を増加させるのみでモータ20のトルクの発生に寄与せず、実施されたとしてもモータ20の駆動の状況を変化させる影響が少ないと言える。そのため、本実施形態によれば、モータ20にトルクを発生させる必要がない状況も含めて、モータ20の駆動の状況に関係なくグランド異常を検出することができる。
(4)本実施形態では、モータ制御装置の起動処理時、すなわちモータ20を駆動させる準備段階において、グランド異常を検出するようにしている。これにより、モータ20が駆動される前にグランド異常を検出することができ、操舵ECU30の信頼性の向上に寄与することができる。
(第2実施形態)
次に、モータ制御装置及び操舵制御装置の第2実施形態について説明する。なお、既に説明した実施形態と同一構成などは、同一の符号を付すなどして、その重複する説明を省略する。
次に、モータ制御装置及び操舵制御装置の第2実施形態について説明する。なお、既に説明した実施形態と同一構成などは、同一の符号を付すなどして、その重複する説明を省略する。
図5に示すように、本実施形態の操舵ECU30は、モータ20のうちの第1系統用コイルC1への駆動電力を供給する第1制御系統31と、モータ20のうちの第2系統用コイルC2への駆動電力を供給する第2制御系統32と、各マイコン55,65を備える替わりに各制御系統31,32を統括的に制御する統括マイコン80とを備えている。なお、本実施形態の操舵ECU30においては、各電圧センサ51b,61bは不要とされる。
統括マイコン80は、各制御系統31,32において、各駆動回路50,60及び各電源リレー52,62の動作を制御する。統括マイコン80には、各マイコン55,65に入力されていた各種情報(電気信号)、すなわち外部指令値θs*、操舵トルクTh、車速V、回転角度θm、各相電流値Iu1,Iv1,Iw1,Iu2,Iv2,Iw2、及び各電源グランド電流値Ignd1,Ignd2が入力される。統括マイコン80は、PWM信号等の各モータ制御信号Sm1,Sm2を出力する。なお、統括マイコン80は、第1外部電源43に接続されているとともに、内部グランド33に接続されている。
図6に示すように、統括マイコン80は、第1実施形態の第1制御系統31が有する、電流指令値演算部70、制御信号生成部71、各減算器71a,71b、各F/B演算部71c,71d、及び3相/2相変換部72aからなる第1信号処理部81を有している。すなわち、第1信号処理部81には、外部指令値θs*、操舵トルクTh、車速V、回転角度θm、各相電流値Iu1,Iv1,Iw1がそれぞれ入力される。なお、本実施形態の第1信号処理部81においては、3相/2相変換部72bは不要とされる。
また、統括マイコン80は、第1実施形態の第2制御系統32が有する、電流指令値演算部70、制御信号生成部71、各減算器71a,71b、各F/B演算部71c,71d、及び各3相/2相変換部72aからなる第2信号処理部82を有している。すなわち、第2信号処理部82には、外部指令値θs*、操舵トルクTh、車速V、回転角度θm、及び各相電流値Iu2,Iv2,Iw2が入力される。なお、本実施形態の第2信号処理部82においては、3相/2相変換部72bは不要とされる。
また、統括マイコン80は、操舵ECU30において、第1実施形態の各異常検出部73,74を備える替わりに統括異常検出部83を有している。なお、統括異常検出部83は、グランド異常の検出時、当該グランド異常が各制御系統31,32の何れで生じているかについても検出することができる。統括異常検出部83には、イグニッション信号IG及び各電源グランド電流値Ignd1,Ignd2が入力される。
ところで、各電源グランド電流値Ignd1,Ignd2は、操舵ECU30、すなわち各制御系統31,32において、グランド異常が生じていない場合、各制御系統31,32が同期動作することを考慮すればほぼ同一である。一方、各電源グランド電流値Ignd1,Ignd2は、第1制御系統31において、グランド異常が生じている場合、第1電源グランド線GL1には電流が流れ込まなくなり、第2電源グランド電流値Ignd2と比較して第1電源グランド電流値Ignd1が小さくなる特徴的な状態となる。また、各電源グランド電流値Ignd1,Ignd2は、第2制御系統32において、グランド異常が生じている場合、第2電源グランド線GL2には電流が流れ込まなくなり、第1電源グランド電流値Ignd1と比較して第2電源グランド電流値Ignd2が小さくなる特徴的な状態となる。
すなわち、統括異常検出部83は、各制御系統31,32に関わる情報を用いて、操舵ECU30のグランド異常を検出することができるとともに、グランド異常の検出時、グランド異常が各制御系統31,32の何れで生じているかを検出することができる。統括異常検出部83は、各電源グランド電流値Ignd1,Ignd2の差に基づいて、グランド異常を検出し、その結果をグランド異常FLGとして各制御系統31,32の電流指令値演算部70に対して出力する。
図4及び図7に示すように、統括異常検出部83は、異常検出処理において、イグニッション信号IGが入力された場合、又はイグニッション信号IGが入力されていないが異常検出タイミングである場合(S10:YES、又はS20:YES)、グランド異常を検出するための処理を実行する。すなわち、統括異常検出部83は、グランド異常を検出するために異常検出用のd軸電流を印加する(S30)。S30にて、統括異常検出部83は、各信号処理部81,82における各d軸電流指令値Id1*,Id2*にそれぞれ加算されるように、d軸電流指令値Idc*をそれぞれの減算器71aに対して出力し、異常検出用のd軸電流を印加する。
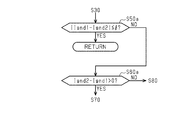
続いて、統括異常検出部83は、各電源グランド電流値Ignd1,Ignd2をそれぞれ取得し、各電源グランド電流値Ignd1,Ignd2の差の絶対値(|Ignd1−Ignd2|)が閾値β以下であるか否かを判定する(S50a)。S50aにて、統括異常検出部83は、各電源グランド線GL1,GL2にほぼ同じだけの電流が流れ込んでいるか否かを判定する。閾値βは、各制御系統31,32における各種部品による公差を考慮して当該公差分を零に対して増減させた値に設定される。
統括異常検出部83は、各電源グランド電流値Ignd1,Ignd2の差の絶対値が閾値β以下の場合(S50a:YES)、異常検出処理を終了する。この場合、統括異常検出部83は、グランド異常が生じていないことから、異常検出FLGを出力しない。
一方、統括異常検出部83は、各電源グランド電流値Ignd1,Ignd2との差の絶対値が閾値βよりも大きい場合(S50a:NO)、第2電源グランド電流値Ignd2から第1電源グランド電流値Ignd1を減算した結果(Ignd2−Ignd1)が零よりも大きいか否かを判定する(S60a)。S50a:NOの場合、統括異常検出部83は、グランド異常を検出したこととなる。そして、S60aにて、統括異常検出部83は、グランド異常が各制御系統31,32の何れで生じているかを特定する。
統括異常検出部83は、第2電源グランド電流値Ignd2から第1電源グランド電流値Ignd1を減算した結果が零よりも大きい場合(S60a:YES)、第2電源グランド線GL2に第1電源グランド線GL1よりも大きい電流が流れ込んでいることを判定し、グランド異常が第1制御系統31で生じていることを検出する(S70)。この場合、第1制御系統異常時フェールでは、統括マイコン80が第2電源リレー62をオン状態に維持しつつ第1電源リレー52をオフ状態へ切り替えるとともに、統括マイコン80が外部指令値θs*を無効化(零)する。
一方、統括異常検出部83は、第2電源グランド電流値Ignd2から第1電源グランド電流値Ignd1を減算した結果が零よりも小さい場合(S60a:NO)、第1電源グランド線GL1に第2電源グランド線GL2よりも大きい電流が流れ込んでいることを判定し、グランド異常が第2制御系統32で生じていることを検出する(S80)。この場合、第2制御系統異常時フェールでは、統括マイコン80が第1電源リレー52をオン状態に維持しつつ第2電源リレー62をオフ状態へ切り替えるとともに、統括マイコン80が外部指令値θs*を無効化(零)する。
以上に説明した本実施形態によれば、上記第1実施形態の(1),(3),(4)の作用及び効果に加えて、以下の作用及び効果を得ることができる。
(5)統括異常検出部83は、グランド異常が生じる場合の各電源グランド電流値Ignd1,Ignd2の特徴的な状態を各電源グランド電流値Ignd1,Ignd2との差(S50aやS60a)によって検出し、その結果に基づいて、グランド異常を検出するようにしている。これにより、より高い精度でグランド異常を検出することができる。
(5)統括異常検出部83は、グランド異常が生じる場合の各電源グランド電流値Ignd1,Ignd2の特徴的な状態を各電源グランド電流値Ignd1,Ignd2との差(S50aやS60a)によって検出し、その結果に基づいて、グランド異常を検出するようにしている。これにより、より高い精度でグランド異常を検出することができる。
この場合、各制御系統31,32の間での比較結果を用いる場合、本実施形態のように、各駆動回路50,60を制御するためのマイコンを各制御系統31,32の間で共通化する構成の実現の観点で特に有効である。
なお、上記各実施形態は、以下の形態にて実施することもできる。
・第1実施形態では、各マイコン55,65において、他方のマイコンが実行する異常検出処理についても実行することによって、グランド異常の相互チェック(相互監視)を行うようにしてもよい。これにより、操舵ECU30の信頼性の低下をより好適に抑制することができる。この場合、各マイコン55,65は、もう一方のマイコンからマイコン間通信によって必要な情報を取得するようにすればよい。
・第1実施形態では、各マイコン55,65において、他方のマイコンが実行する異常検出処理についても実行することによって、グランド異常の相互チェック(相互監視)を行うようにしてもよい。これにより、操舵ECU30の信頼性の低下をより好適に抑制することができる。この場合、各マイコン55,65は、もう一方のマイコンからマイコン間通信によって必要な情報を取得するようにすればよい。
・第1実施形態では、各異常検出部73,74の機能を各マイコン55,65のどちらか一方に集約させてもよい。この場合、各異常検出部73,74の機能を集約させたマイコンは、もう一方のマイコンからマイコン間通信によって必要な情報を取得するようにすればよい。
・第1実施形態は、第2実施形態と同様、各マイコン55,65を備える替わりに統括マイコン80を備えるようにしてもよい。この場合、統括マイコン80は、各制御系統31,32のうち、外部電源が接続される側の制御系統について、異常検出処理を実行すればよい。その他、統括マイコン80は、各制御系統31,32について、異常検出処理をそれぞれ別々に実行してもよい。この場合、電源電圧値については、電圧センサや電流センサを設けて取得可能にすればよい。
・第1実施形態は、S50やS60の替わりに、第2実施形態と同様、S50aやS60aの処理を実行するようにしてもよい。また、S50aやS60aは、S50やS60と合わせて実行するようにしてもよい。この場合、各マイコン55,65は、もう一方のマイコンからマイコン間通信によって必要な情報を取得するようにすればよい。一方、第2実施形態は、S50aやS60aの替わりに、第1実施形態と同様、S50やS60の処理を実行するようにしてもよい。また、S50やS60は、S50aやS60aと合わせて実行するようにしてもよい。この場合、統括マイコン80は、センサを追加する等して必要な情報を取得するようにすればよい。
・第2実施形態において、統括マイコン80は、第2外部電源44に接続されていてもよいし、各外部電源43,44とは別の外部電源に接続されていてもよい。
・第2実施形態において、S50aでは、各電源グランド電流値Ignd1,Ignd2の比、すなわちIgnd1/Ignd2やIgnd2/Ignd1の絶対値が閾値γ以下であるか否かを判定するようにしてもよい。閾値γは、各制御系統31,32における各種部品による公差を考慮して当該公差分を1に対して増減させた値に設定される。この場合、S60aでは、S50a:NOの場合、例えば、Ignd2/Ignd1が1よりも大きいか否かを判定するようにすればよい。Ignd2/Ignd1が1よりも大きい場合、第2電源グランド線GL2に第1電源グランド線GL1よりも大きい電流が流れ込んでいることを示す。また、Ignd2/Ignd1が1よりも小さい場合、第1電源グランド線GL1に第2電源グランド線GL2よりも大きい電流が流れ込んでいることを示す。この場合であっても、より高い精度でグランド異常を検出することができる。
・第2実施形態において、S50aでは、各電源グランド電流値Ignd1,Ignd2の比、すなわちIgnd1/Ignd2やIgnd2/Ignd1の絶対値が閾値γ以下であるか否かを判定するようにしてもよい。閾値γは、各制御系統31,32における各種部品による公差を考慮して当該公差分を1に対して増減させた値に設定される。この場合、S60aでは、S50a:NOの場合、例えば、Ignd2/Ignd1が1よりも大きいか否かを判定するようにすればよい。Ignd2/Ignd1が1よりも大きい場合、第2電源グランド線GL2に第1電源グランド線GL1よりも大きい電流が流れ込んでいることを示す。また、Ignd2/Ignd1が1よりも小さい場合、第1電源グランド線GL1に第2電源グランド線GL2よりも大きい電流が流れ込んでいることを示す。この場合であっても、より高い精度でグランド異常を検出することができる。
・各実施形態において、グランド異常の検出は、モータ20に発生させているトルクが零の状況に限るようにしてもよい。この場合、S30の判定に先立って、モータ20に発生させているトルクが零であるか否かを判定し、モータ20に発生させているトルクが零の場合に、異常検出用のd軸電流を印加するようにしてもよい。モータ20に発生させているトルクが零でない場合には、電気回路が動作している状態であることから、異常検出用のd軸電流を印加しなくてもグランド異常を検出することができる。なお、モータ20に発生させているトルクが零であるか否かの判定には、例えば、d軸電流指令値Id*及びq軸電流指令値Iq*を用いればよい。その他、S30の判定に先立って、操舵ECU30の起動処理時の他、車両Aが直進中であるか否かを判定するようにしてもよい。なお、車両Aが直進中であるか否かについては、外部指令値θs*の変化幅やモータ20の回転角度θmの変化幅を用いたり、モータ20の実電流の変化幅を用いたりして判定すればよい。本変形例によれば、グランド異常の検出に関わる消費電力を低減することができる。
・各実施形態において、S30では、異常検出用のd軸電流に替えて、異常検出用のq軸電流を印加するようにしてもよい。この場合、各系統用コイルC1,C2において、互いに逆方向(位相を180°ずらした)の異常検出用のq軸電流を印加することによって、モータ20にトルクを発生させることなく各制御系統31,32の電気回路が動作している状態を作り出すことができる。これにより、上記各実施形態と同様、モータ20にトルクを発生させる必要がない状況も含めて、モータ20の駆動の状況に関係なくグランド異常を検出することができる。
・各実施形態では、閾値αや閾値βを変更してもよく、例えば、グランド異常について、グランド異常を事前に検出できるようにそれぞれの値を設定することもできる。これにより、グランド異常を生じる前に先回りしてフェールを作動させたりできるようになる。本変形例は、グランド異常を検出するために検出結果のみを用いる第2実施形態の構成の場合、特に有効に機能させることができる。
・各実施形態において、各マイコン55,65や統括マイコン80を内部グランド33とは別のグランドに接続する場合、各電源電圧値Vba1,Vba2については、電圧センサや電流センサを設けて取得可能にすればよい。
・各実施形態において、操舵ECU30では、複数の制御系統が構成されていればよく、3系統や4系統以上の制御系統が構成されていれもよい。この場合、外部電源についても各制御系統が構成される分だけ設けられていればよい。
・各実施形態において、各制御系統異常時フェールでは、モータ20の制御が停止された制御系統分を残った制御系統で補うようにマイコンがモータ20の駆動を制御するようにしてもよい。
・各実施形態において、モータ20の回転速度が大きい場合には、d軸電流を負として、弱め磁界制御を実行してもよい。
・各実施形態において、各電流検出部54,64は、ホール素子等の磁気センサを用いた非接触式のセンサを用いたり、ノイズ対策用のコイル等、電気回路上に存在している部品を用いて検出したりしてもよい。これは、各電流センサ51a,61aや各電圧センサ51b,61bについても同様である。
・各実施形態において、各電流検出部54,64は、ホール素子等の磁気センサを用いた非接触式のセンサを用いたり、ノイズ対策用のコイル等、電気回路上に存在している部品を用いて検出したりしてもよい。これは、各電流センサ51a,61aや各電圧センサ51b,61bについても同様である。
・各実施形態において、モータ20は、独立した2つのモータであってもよい。
・各実施形態において、自動操舵ECU4は、外部指令値θs*として、回転角度θmに換算した指令値を出力するようにしてもよい。
・各実施形態において、自動操舵ECU4は、外部指令値θs*として、回転角度θmに換算した指令値を出力するようにしてもよい。
・各実施形態は、自動操舵モードの設定が指示されている間に介入操作があった場合、自動操舵制御を中断又は停止させて自動操舵モードの設定が指示されない状態、すなわちEPS制御に切り替えるようにした自動操舵装置1に適用してもよい。
・各実施形態の自動操舵モードは、例えば、横滑り防止装置(ビークル・スタビリティ・コントロール)でステアリングシャフト11に操舵力を付与する機能のものであってもよい。
・各実施形態は、自動操舵モードを有していない操舵装置、すなわちEPS制御のみを実行する操舵装置にも適用可能である。
・各実施形態は、例えば、ステアバイワイヤ式の操舵装置にも適用可能である。この場合、操舵力付与機構3をラックシャフト12の周辺に設けるようにすればよい。本変形例において、自動操舵モードの間は、例えば、ステアリングホイール10の回転が転舵輪15の転舵に連動する機能を停止させ、ステアリングホイール10の回転と転舵輪15の転舵とが連動しないようにしてもよい。
・各実施形態は、例えば、ステアバイワイヤ式の操舵装置にも適用可能である。この場合、操舵力付与機構3をラックシャフト12の周辺に設けるようにすればよい。本変形例において、自動操舵モードの間は、例えば、ステアリングホイール10の回転が転舵輪15の転舵に連動する機能を停止させ、ステアリングホイール10の回転と転舵輪15の転舵とが連動しないようにしてもよい。
・各実施形態では、自動操舵モードしか有しておらず、ユーザーのステアリング操作を想定しない場合、ステアリングホイール10を省くようにしてもよい。
・各実施形態では、自動操舵装置1をコラムアシストEPSに具体化したが、自動操舵装置1をラックアシストEPSやピニオンアシストEPSに適用してもよい。
・各実施形態では、自動操舵装置1をコラムアシストEPSに具体化したが、自動操舵装置1をラックアシストEPSやピニオンアシストEPSに適用してもよい。
・各実施形態は、転舵輪15を駆動する駆動用のモータの制御にも適用可能である。また、各実施形態は、車両用とは異なる用途で用いられるモータの制御にも適用可能である。
1…自動操舵装置、2…操舵機構、3…操舵力付与機構、4…自動操舵ECU、15…転舵輪、20…モータ、30…操舵ECU、31…第1制御系統、32…第2制御系統、33…内部グランド、43…第1外部電源、44…第2外部電源、50…第1駆動回路、54…第1電流検出部、60…第2駆動回路、64…第2電流検出部、73…第1異常検出部、74…第2異常検出部、A…車両、Bo…ボディ、C1…第1系統用コイル、C2…第2系統用コイル、GL1…第1電源グランド線、GL2…第2電源グランド線、Iba1…第1電源電流値、Iba2…第2電源電流値、Id1,Id2…d軸電流値、Idc*…d軸電流指令値、Iq1,Iq2…q軸電流値、Ignd1…第1電源グランド電流値、Ignd2…第2電源グランド電流値、θm…回転角度、θs*…外部指令値。
Claims (6)
- 外部電源を電力源として、駆動電力を制御対象であるモータの巻線に供給するように動作する複数の駆動回路を備え、前記複数の駆動回路にはそれぞれ異なる外部電源が接続されることによって、複数の制御系統が構成されるモータ制御装置において、
前記複数の制御系統について、各駆動回路の低電位側とそれぞれに対応する外部電源の低電位側とは、制御系統毎に独立したグランドである複数の電源グランドを介して接続されるとともに、各駆動回路の低電位側は、それぞれ共通のグランドである内部グランドを介して接続されており、
前記複数の電源グランドと前記内部グランドとの間には、前記複数の電源グランドの電流であるグランド電流をそれぞれ検出する複数の電流検出部が設けられ、
前記複数の電流検出部の検出結果に基づいて、前記複数の制御系統における各電源グランドの異常であるグランド異常を検出する異常検出部を備えていることを特徴とするモータ制御装置。 - 前記異常検出部は、
前記駆動回路が前記モータに供給している前記駆動電力に基づいて、対応する外部電源の電源電流を前記複数の制御系統毎に演算し、
前記複数の制御系統における各電源電流と、前記複数の制御系統に対応する各電流検出部の検出結果との差に基づいて、前記グランド異常を検出する請求項1に記載のモータ制御装置。 - 前記異常検出部は、前記複数の制御系統に対応する各電流検出部の検出結果を前記複数の制御系統の間で比較した結果に基づいて、前記グランド異常を検出する請求項1又は請求項2に記載のモータ制御装置。
- 前記各駆動回路は、前記異常検出部が前記グランド異常を検出するタイミングにおいて、前記モータに対してdp座標系のd軸電流を印加する請求項1〜請求項3のうちいずれか一項に記載のモータ制御装置。
- 前記異常検出部が前記グランド異常を検出するタイミングには、前記モータに発生させるトルクが零の状況が含まれている請求項4に記載のモータ制御装置。
- 請求項1〜請求項5のうちいずれか一項に記載のモータ制御装置は、外部指令値を含む電気信号が外部から入力されることに基づいて、転舵輪の転舵角を変化させる動力を付与するように前記モータの制御量を制御する操舵制御装置である。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016054175A JP2017169405A (ja) | 2016-03-17 | 2016-03-17 | モータ制御装置及び操舵制御装置 |
| US15/454,422 US10003286B2 (en) | 2016-03-17 | 2017-03-09 | Motor control device and steering control device |
| CN201710153823.1A CN107204729A (zh) | 2016-03-17 | 2017-03-15 | 马达控制装置及转向操作控制装置 |
| EP17161364.9A EP3219579A1 (en) | 2016-03-17 | 2017-03-16 | Motor control device and steering control device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016054175A JP2017169405A (ja) | 2016-03-17 | 2016-03-17 | モータ制御装置及び操舵制御装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017169405A true JP2017169405A (ja) | 2017-09-21 |
Family
ID=58358428
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016054175A Pending JP2017169405A (ja) | 2016-03-17 | 2016-03-17 | モータ制御装置及び操舵制御装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US10003286B2 (ja) |
| EP (1) | EP3219579A1 (ja) |
| JP (1) | JP2017169405A (ja) |
| CN (1) | CN107204729A (ja) |
Cited By (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019176316A1 (ja) * | 2018-03-13 | 2019-09-19 | 日立オートモティブシステムズ株式会社 | 車両搭載機器の制御装置 |
| WO2019176299A1 (ja) * | 2018-03-13 | 2019-09-19 | 日立オートモティブシステムズ株式会社 | 車両搭載機器の制御装置 |
| WO2019198407A1 (ja) * | 2018-04-12 | 2019-10-17 | 日立オートモティブシステムズ株式会社 | 電子制御装置及びその診断方法 |
| JP2019193473A (ja) * | 2018-04-26 | 2019-10-31 | 日本電産エレシス株式会社 | モータ制御装置及び電動パワーステアリング装置 |
| JP2020048371A (ja) * | 2018-09-21 | 2020-03-26 | 日立オートモティブシステムズ株式会社 | 電子制御装置 |
| JP2020145776A (ja) * | 2019-03-04 | 2020-09-10 | 日立オートモティブシステムズ株式会社 | 電動モータの駆動制御装置 |
| CN112087154A (zh) * | 2019-06-14 | 2020-12-15 | 株式会社电装 | 电源系统 |
| JP2022501266A (ja) * | 2018-09-18 | 2022-01-06 | クノル−ブレムゼ ジステーメ フューア ヌッツファールツォイゲ ゲゼルシャフト ミット ベシュレンクテル ハフツングKnorr−Bremse Systeme fuer Nutzfahrzeuge GmbH | 保護回路および車両電源を保護する方法 |
| WO2022153690A1 (ja) * | 2021-01-14 | 2022-07-21 | 日立Astemo株式会社 | 電子制御装置、及びグランドラインの配索方法 |
| WO2022259828A1 (ja) * | 2021-06-08 | 2022-12-15 | 株式会社デンソー | 電力供給装置 |
| US11626780B2 (en) | 2019-04-02 | 2023-04-11 | Denso Corporation | Electronic control device |
| WO2024024244A1 (ja) * | 2022-07-26 | 2024-02-01 | 日立Astemo株式会社 | 電動駆動装置の制御装置 |
| WO2024190417A1 (ja) * | 2023-03-13 | 2024-09-19 | 日立Astemo株式会社 | 電動モータの駆動制御装置 |
Families Citing this family (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10343713B2 (en) * | 2016-01-14 | 2019-07-09 | Mitsubishi Electric Corporation | Electric power steering apparatus |
| CN109693707A (zh) * | 2017-10-24 | 2019-04-30 | 上汽通用汽车有限公司 | 电动转向系统 |
| US11318844B2 (en) * | 2017-11-26 | 2022-05-03 | Delta Electronics, Inc. | On-board charging device and operating method thereof |
| CN108528523A (zh) * | 2018-03-29 | 2018-09-14 | 株洲易力达机电有限公司 | 一种双路电动助力转向控制系统及方法 |
| JP7087845B2 (ja) * | 2018-09-03 | 2022-06-21 | 株式会社デンソー | シフトレンジ制御装置 |
| DE102018124906A1 (de) * | 2018-10-09 | 2020-04-09 | Thyssenkrupp Ag | Redundante Steuereinheit für eine Kraftfahrzeuglenkung |
| CN109104132A (zh) * | 2018-10-09 | 2018-12-28 | 江苏新日电动车股份有限公司 | 一种电动车双擎动力系统 |
| JP7236248B2 (ja) * | 2018-10-29 | 2023-03-09 | 株式会社ジェイテクト | モータ制御装置 |
| JP7225689B2 (ja) * | 2018-11-05 | 2023-02-21 | 株式会社ジェイテクト | モータ制御装置 |
| JP7271943B2 (ja) * | 2018-12-25 | 2023-05-12 | 株式会社ジェイテクト | 操舵制御装置 |
| JP7232067B2 (ja) * | 2019-02-07 | 2023-03-02 | 株式会社ジェイテクト | モータ制御装置 |
| JP7251222B2 (ja) * | 2019-03-11 | 2023-04-04 | 株式会社デンソー | 電動機制御装置および電動機制御方法 |
| JP7207106B2 (ja) * | 2019-04-02 | 2023-01-18 | 株式会社デンソー | 制御装置 |
| JP7280099B2 (ja) * | 2019-04-19 | 2023-05-23 | 株式会社ジェイテクト | モータの制御システム、およびモータの制御装置 |
| JP7156168B2 (ja) * | 2019-05-17 | 2022-10-19 | 株式会社デンソー | 電気駆動装置 |
| JP7264031B2 (ja) * | 2019-12-09 | 2023-04-25 | トヨタ自動車株式会社 | 制御装置 |
| CN111038578B (zh) * | 2019-12-11 | 2020-12-01 | 南京航空航天大学 | 一种双源双绕组电机线控转向系统及其容错控制方法 |
| JP7226303B2 (ja) * | 2019-12-26 | 2023-02-21 | 株式会社デンソー | 制御装置 |
| JP7370901B2 (ja) * | 2020-02-26 | 2023-10-30 | ニデックモビリティ株式会社 | 制御装置および制御方法 |
| CN111746630B (zh) * | 2020-05-11 | 2021-12-31 | 舒航(苏州)机电科技有限公司 | 一种电动助力转向双控系统及其级联刷新方法 |
| JP7579217B2 (ja) * | 2021-07-07 | 2024-11-07 | 日立Astemo株式会社 | ステアバイワイヤ制御装置、及びステアバイワイヤ制御方法 |
| US11621661B2 (en) * | 2021-07-23 | 2023-04-04 | Texas Instruments Incorporated | Motor control with reduced back current during braking |
| KR20240111109A (ko) * | 2023-01-09 | 2024-07-16 | 현대모비스 주식회사 | 차량의 전자식 조향장치 및 그 제어방법 |
| FR3146630A1 (fr) * | 2023-03-14 | 2024-09-20 | Psa Automobiles Sa | Dispositif d’alimentation électrique sécurisée d’organes sécuritaires pour un véhicule automobile |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6856137B2 (en) | 2002-02-19 | 2005-02-15 | Bae Systems Controls Inc. | Ground fault detection system and method |
| JP4230348B2 (ja) * | 2003-12-22 | 2009-02-25 | 株式会社デンソー | 回転検出装置 |
| KR101139146B1 (ko) * | 2006-04-20 | 2012-04-26 | 미쓰비시덴키 가부시키가이샤 | 전동기 제어 장치 |
| US8497687B2 (en) | 2010-01-21 | 2013-07-30 | GM Global Technology Operations LLC | Method and apparatus for monitoring electrical ground isolation in a powertrain system |
| JP5093698B2 (ja) * | 2010-05-28 | 2012-12-12 | 株式会社デンソー | 電動機駆動装置、および、それを用いた電動パワーステアリング装置 |
| US8656791B2 (en) | 2010-08-25 | 2014-02-25 | Toyota Jidosha Kabushiki Kaisha | Torque detection apparatus |
| JP5898104B2 (ja) | 2013-02-13 | 2016-04-06 | 日立オートモティブシステムズステアリング株式会社 | 電源電圧監視回路、車両のセンサ回路およびパワーステアリング装置 |
| US9139223B2 (en) | 2013-05-23 | 2015-09-22 | Caterpillar Inc. | Managing steering with short from battery to ground |
| JP2015080327A (ja) | 2013-10-16 | 2015-04-23 | 三菱電機株式会社 | モータ制御システム |
| JP2016032977A (ja) * | 2014-07-31 | 2016-03-10 | 株式会社デンソー | 電動パワーステアリングシステムおよび車両制御システム |
| US20160224227A1 (en) * | 2015-01-29 | 2016-08-04 | Caterpillar Inc. | Indication Display System |
-
2016
- 2016-03-17 JP JP2016054175A patent/JP2017169405A/ja active Pending
-
2017
- 2017-03-09 US US15/454,422 patent/US10003286B2/en not_active Expired - Fee Related
- 2017-03-15 CN CN201710153823.1A patent/CN107204729A/zh active Pending
- 2017-03-16 EP EP17161364.9A patent/EP3219579A1/en not_active Withdrawn
Cited By (36)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPWO2019176316A1 (ja) * | 2018-03-13 | 2020-12-03 | 日立オートモティブシステムズ株式会社 | 車両搭載機器の制御装置 |
| WO2019176299A1 (ja) * | 2018-03-13 | 2019-09-19 | 日立オートモティブシステムズ株式会社 | 車両搭載機器の制御装置 |
| WO2019176316A1 (ja) * | 2018-03-13 | 2019-09-19 | 日立オートモティブシステムズ株式会社 | 車両搭載機器の制御装置 |
| JP7022196B2 (ja) | 2018-03-13 | 2022-02-17 | 日立Astemo株式会社 | 車両搭載機器の制御装置 |
| US11498614B2 (en) | 2018-03-13 | 2022-11-15 | Hitachi Astemo, Ltd. | Control device for on-board device |
| US20200406962A1 (en) * | 2018-03-13 | 2020-12-31 | Hitachi Automotive Systems, Ltd. | Control device for on-board device |
| JPWO2019176299A1 (ja) * | 2018-03-13 | 2020-12-17 | 日立オートモティブシステムズ株式会社 | 車両搭載機器の制御装置 |
| US11745791B2 (en) | 2018-03-13 | 2023-09-05 | Hitachi Astemo, Ltd. | Control device for on-board device |
| JP6999480B2 (ja) | 2018-04-12 | 2022-01-18 | 日立Astemo株式会社 | 電子制御装置及びその診断方法 |
| JP2019187134A (ja) * | 2018-04-12 | 2019-10-24 | 日立オートモティブシステムズ株式会社 | 電子制御装置及びその診断方法 |
| WO2019198407A1 (ja) * | 2018-04-12 | 2019-10-17 | 日立オートモティブシステムズ株式会社 | 電子制御装置及びその診断方法 |
| US10994769B2 (en) | 2018-04-12 | 2021-05-04 | Hitachi Automotive Systems, Ltd. | Electronic control unit and diagnostic method therefor |
| JP7271090B2 (ja) | 2018-04-26 | 2023-05-11 | ニデックエレシス株式会社 | モータ制御装置及び電動パワーステアリング装置 |
| JP2019193473A (ja) * | 2018-04-26 | 2019-10-31 | 日本電産エレシス株式会社 | モータ制御装置及び電動パワーステアリング装置 |
| JP7239710B2 (ja) | 2018-09-18 | 2023-03-14 | クノル-ブレムゼ ジステーメ フューア ヌッツファールツォイゲ ゲゼルシャフト ミット ベシュレンクテル ハフツング | 保護回路および車両電源を保護する方法 |
| JP2022501266A (ja) * | 2018-09-18 | 2022-01-06 | クノル−ブレムゼ ジステーメ フューア ヌッツファールツォイゲ ゲゼルシャフト ミット ベシュレンクテル ハフツングKnorr−Bremse Systeme fuer Nutzfahrzeuge GmbH | 保護回路および車両電源を保護する方法 |
| JP2020048371A (ja) * | 2018-09-21 | 2020-03-26 | 日立オートモティブシステムズ株式会社 | 電子制御装置 |
| JP7011995B2 (ja) | 2018-09-21 | 2022-01-27 | 日立Astemo株式会社 | 電子制御装置 |
| US11323058B2 (en) | 2019-03-04 | 2022-05-03 | Hitachi Astemo, Ltd. | Drive controller for electric motor |
| WO2020179818A1 (ja) * | 2019-03-04 | 2020-09-10 | 日立オートモティブシステムズ株式会社 | 電動モータの駆動制御装置 |
| JP2020145776A (ja) * | 2019-03-04 | 2020-09-10 | 日立オートモティブシステムズ株式会社 | 電動モータの駆動制御装置 |
| JP7137496B2 (ja) | 2019-03-04 | 2022-09-14 | 日立Astemo株式会社 | 電動モータの駆動制御装置 |
| US11626780B2 (en) | 2019-04-02 | 2023-04-11 | Denso Corporation | Electronic control device |
| JP2020205663A (ja) * | 2019-06-14 | 2020-12-24 | 株式会社デンソー | 電源システム |
| DE102020207267B4 (de) * | 2019-06-14 | 2026-02-05 | Denso Corporation | Stromversorgungssystem |
| CN112087154A (zh) * | 2019-06-14 | 2020-12-15 | 株式会社电装 | 电源系统 |
| JP7188285B2 (ja) | 2019-06-14 | 2022-12-13 | 株式会社デンソー | 電源システム |
| JPWO2022153690A1 (ja) * | 2021-01-14 | 2022-07-21 | ||
| WO2022153690A1 (ja) * | 2021-01-14 | 2022-07-21 | 日立Astemo株式会社 | 電子制御装置、及びグランドラインの配索方法 |
| JP7655950B2 (ja) | 2021-01-14 | 2025-04-02 | 日立Astemo株式会社 | 電子制御装置、及びグランドラインの配索方法 |
| US12604393B2 (en) | 2021-01-14 | 2026-04-14 | Hitachi Astemo, Ltd. | Electronic control device and ground line routing method |
| JP2022187621A (ja) * | 2021-06-08 | 2022-12-20 | 株式会社デンソー | 電力供給装置 |
| JP7552508B2 (ja) | 2021-06-08 | 2024-09-18 | 株式会社デンソー | 電力供給装置 |
| WO2022259828A1 (ja) * | 2021-06-08 | 2022-12-15 | 株式会社デンソー | 電力供給装置 |
| WO2024024244A1 (ja) * | 2022-07-26 | 2024-02-01 | 日立Astemo株式会社 | 電動駆動装置の制御装置 |
| WO2024190417A1 (ja) * | 2023-03-13 | 2024-09-19 | 日立Astemo株式会社 | 電動モータの駆動制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3219579A1 (en) | 2017-09-20 |
| US20170272009A1 (en) | 2017-09-21 |
| CN107204729A (zh) | 2017-09-26 |
| US10003286B2 (en) | 2018-06-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2017169405A (ja) | モータ制御装置及び操舵制御装置 | |
| US10266198B2 (en) | Motor control device | |
| JP5907314B2 (ja) | モータ制御装置、これを使用した電動パワーステアリング装置および車両 | |
| US10322748B2 (en) | Motor controller and steering device | |
| CN107922001B (zh) | 电动助力转向装置 | |
| US10577017B2 (en) | Steering control apparatus | |
| JP6175704B2 (ja) | パワーステアリング装置およびパワーステアリング装置用制御装置 | |
| JP6701044B2 (ja) | モータ制御装置及びステアリング装置 | |
| CN108238094B (zh) | 转向操纵控制装置 | |
| JP6710614B2 (ja) | モータ制御装置及びステアリング装置 | |
| US20200023890A1 (en) | Motor controller | |
| JP2014135866A (ja) | モータ制御装置及び電動パワーステアリング装置 | |
| JP2018038176A (ja) | モータ制御装置 | |
| JP2012056404A (ja) | 電動パワーステアリング装置 | |
| JP5991264B2 (ja) | 電動パワーステアリング装置 | |
| JP2012147531A (ja) | 電動パワーステアリング装置 | |
| JP5263079B2 (ja) | 電動パワーステアリング装置 | |
| JP5831060B2 (ja) | モータ制御装置及び車両用操舵装置 | |
| JP2016096608A (ja) | モータ制御装置、これを使用した電動パワーステアリング装置および車両 | |
| JP6740842B2 (ja) | 多相回転機の制御装置 |