JP7655950B2 - 電子制御装置、及びグランドラインの配索方法 - Google Patents
電子制御装置、及びグランドラインの配索方法 Download PDFInfo
- Publication number
- JP7655950B2 JP7655950B2 JP2022575110A JP2022575110A JP7655950B2 JP 7655950 B2 JP7655950 B2 JP 7655950B2 JP 2022575110 A JP2022575110 A JP 2022575110A JP 2022575110 A JP2022575110 A JP 2022575110A JP 7655950 B2 JP7655950 B2 JP 7655950B2
- Authority
- JP
- Japan
- Prior art keywords
- ground
- power supply
- line
- board
- power
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images













Classifications
-
- H—ELECTRICITY
- H05—ELECTRIC TECHNIQUES NOT OTHERWISE PROVIDED FOR
- H05K—PRINTED CIRCUITS; CASINGS OR CONSTRUCTIONAL DETAILS OF ELECTRIC APPARATUS; MANUFACTURE OF ASSEMBLAGES OF ELECTRICAL COMPONENTS
- H05K1/00—Printed circuits
- H05K1/02—Details
- H05K1/14—Structural association of two or more printed circuits
- H05K1/144—Stacked arrangements of planar printed circuit boards
-
- H—ELECTRICITY
- H05—ELECTRIC TECHNIQUES NOT OTHERWISE PROVIDED FOR
- H05K—PRINTED CIRCUITS; CASINGS OR CONSTRUCTIONAL DETAILS OF ELECTRIC APPARATUS; MANUFACTURE OF ASSEMBLAGES OF ELECTRICAL COMPONENTS
- H05K1/00—Printed circuits
- H05K1/02—Details
- H05K1/0213—Electrical arrangements not otherwise provided for
- H05K1/0216—Reduction of cross-talk, noise or electromagnetic interference
- H05K1/0218—Reduction of cross-talk, noise or electromagnetic interference by printed shielding conductors, ground planes or power plane
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0403—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by constructional features, e.g. common housing for motor and gear box
- B62D5/0406—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by constructional features, e.g. common housing for motor and gear box including housing for electronic control unit
-
- H—ELECTRICITY
- H05—ELECTRIC TECHNIQUES NOT OTHERWISE PROVIDED FOR
- H05K—PRINTED CIRCUITS; CASINGS OR CONSTRUCTIONAL DETAILS OF ELECTRIC APPARATUS; MANUFACTURE OF ASSEMBLAGES OF ELECTRICAL COMPONENTS
- H05K1/00—Printed circuits
- H05K1/02—Details
- H05K1/14—Structural association of two or more printed circuits
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0457—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such
- B62D5/046—Controlling the motor
-
- H—ELECTRICITY
- H05—ELECTRIC TECHNIQUES NOT OTHERWISE PROVIDED FOR
- H05K—PRINTED CIRCUITS; CASINGS OR CONSTRUCTIONAL DETAILS OF ELECTRIC APPARATUS; MANUFACTURE OF ASSEMBLAGES OF ELECTRICAL COMPONENTS
- H05K2201/00—Indexing scheme relating to printed circuits covered by H05K1/00
- H05K2201/04—Assemblies of printed circuits
- H05K2201/042—Stacked spaced PCBs; Planar parts of folded flexible circuits having mounted components in between or spaced from each other
-
- H—ELECTRICITY
- H05—ELECTRIC TECHNIQUES NOT OTHERWISE PROVIDED FOR
- H05K—PRINTED CIRCUITS; CASINGS OR CONSTRUCTIONAL DETAILS OF ELECTRIC APPARATUS; MANUFACTURE OF ASSEMBLAGES OF ELECTRICAL COMPONENTS
- H05K2201/00—Indexing scheme relating to printed circuits covered by H05K1/00
- H05K2201/09—Shape and layout
- H05K2201/09209—Shape and layout details of conductors
- H05K2201/0929—Conductive planes
- H05K2201/09345—Power and ground in the same plane; Power planes for two voltages in one plane
Landscapes
- Engineering & Computer Science (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Combinations Of Printed Boards (AREA)
- Power Steering Mechanism (AREA)
- Inverter Devices (AREA)
Description
図1は、本実施形態の適用対象の一例である、乗用車、バス、トラック、建設機械などの車両に搭載された、電動パワーステアリングシステム100の一例を示している。
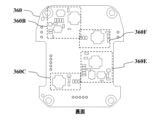
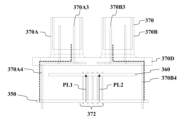
直流電源の一例として挙げることができるバッテリBAT1のグランド端子及び電源端子は、電源コネクタ370Aのグランド端子370A1及び電源端子370A3に夫々接続されている。電源コネクタ370Aのグランド端子370A1は、電源基板350に実装されたインバータ回路350Bのグランド端子に接続されるとともに、制御基板360の共通グランド360Gに接続されている。また、電源コネクタ370Aの電源端子370A3は、電源基板350に実装されたインバータ回路350Bの電源端子に接続されるとともに、制御基板360に実装された電源回路360Bの電源端子に接続されている。そして、電源基板350に実装されたインバータ回路350Bは、モータ320の第1のコイル320Aに駆動電流を出力する。なお、制御基板360の電源回路360Bは、マイクロコンピュータ360A及びインバータ駆動信号生成回路360Cに所定電圧の直流電源を供給する。
直流電源の一例として挙げることができるバッテリBAT2のグランド端子及び電源端子は、電源コネクタ370Bのグランド端子370B1及び電源端子370B3に夫々接続されている。電源コネクタ370Bのグランド端子370B1は、電源基板350に実装されたインバータ回路350Dのグランド端子に接続されるとともに、制御基板360の共通グランド360Gに接続されている。また、電源コネクタ370Bの電源端子370B3は、電源基板350に実装されたインバータ回路350Dの電源端子に接続されるとともに、制御基板360に実装された電源回路360Eの電源端子に接続されている。そして、電源基板350に実装されたインバータ回路350Dは、モータ320の第2のコイル320Bに駆動電流を出力する。なお、制御基板360の電源回路360Eは、マイクロコンピュータ360D及びインバータ駆動信号生成回路360Fに所定電圧の直流電源を供給する。
Claims (12)
- 相互に信号を伝達する複数の基板、及び直流電源の電源コネクタを備えた電子制御装置であって、
前記電源コネクタのグランド端子に接続されるグランドラインが、前記複数の基板の1つのグランドを経由して、他の基板のグランドに接続され、
前記電源コネクタの電源端子が、前記電源コネクタのグランド端子が直接接続された、前記基板に対してのみ接続され、
前記複数の基板間において、前記基板の一方から前記基板の他方に電源電圧を供給する電源ライン、前記基板の他方において前記電源電圧を降圧して前記基板の一方に供給する降圧ライン、及び前記グランドラインが近接して配置された、
電子制御装置。 - 相互に信号を伝達する複数の基板、及び直流電源の電源コネクタを備えた電子制御装置であって、
前記電源コネクタのグランド端子に接続されるグランドラインが、前記複数の基板の1つのグランドを経由して、他の基板のグランドに接続され、
前記電源コネクタの電源端子が、前記電源コネクタのグランド端子が直接接続された、前記基板に対してのみ接続され、
前記複数の基板間において、前記基板の一方から前記基板の他方に電源電圧を供給する電源ライン、前記基板の他方から前記基板の一方に供給する前記電源電圧と同程度の電圧を有する信号ライン、及び前記グランドラインが近接して配置された、
電子制御装置。 - 前記複数の基板は、少なくともマイクロコンピュータが実装された制御基板と、少なくとも電源電圧の平滑回路が実装された電源基板と、を含み、
前記グランドラインが、前記電源基板のグランドを経由して、前記制御基板のグランドに接続された、
請求項1又は請求項2に記載の電子制御装置。 - 前記複数の基板は、少なくともマイクロコンピュータが実装された制御基板と、少なくとも電源電圧の平滑回路が実装された電源基板と、を含み、
前記グランドラインが、前記制御基板のグランドを経由して、前記電源基板のグランドに接続された、
請求項1又は請求項2に記載の電子制御装置。 - 前記電源コネクタ、前記マイクロコンピュータ及び前記平滑回路が二重化された冗長系統を有し、
前記制御基板のグランドが、各系統間で共通する共通グランドとなっており、
各系統において、前記電源基板のグランドと前記制御基板の共通グランドとを接続する前記グランドラインに、当該グランドラインに流れる電流を検出する電流検出素子が配置された、
請求項3又は請求項4に記載の電子制御装置。 - 前記電源ライン、前記グランドライン及び前記降圧ラインが、前記基板の厚さより小さい距離をもって配置された、
請求項1に記載の電子制御装置。 - 前記電源ライン、前記グランドライン及び前記信号ラインが、前記基板の厚さより小さい距離をもって配置された、
請求項2に記載の電子制御装置。 - 相互に信号を伝達する複数の基板、及び直流電源の電源コネクタを備えた電子制御装置のグランドラインの配索方法であって、
前記電源コネクタのグランド端子に接続されるグランドラインを、前記複数の基板の1つのグランドを経由して、他の基板のグランドに接続し、
前記電源コネクタの電源端子を、前記電源コネクタのグランド端子が直接接続された、前記基板に対してのみ接続し、
前記複数の基板間において、前記基板の一方から前記基板の他方に電源電圧を供給する電源ライン、前記基板の他方において前記電源電圧を降圧して前記基板の一方に供給する降圧ライン、及び前記グランドラインを近接して配置する、
グランドラインの配索方法。 - 相互に信号を伝達する複数の基板、及び直流電源の電源コネクタを備えた電子制御装置のグランドラインの配索方法であって、
前記電源コネクタのグランド端子に接続されるグランドラインを、前記複数の基板の1つのグランドを経由して、他の基板のグランドに接続し、
前記電源コネクタの電源端子を、前記電源コネクタのグランド端子が直接接続された、前記基板に対してのみ接続し、
前記複数の基板間において、前記基板の一方から前記基板の他方に電源電圧を供給する電源ライン、前記基板の他方から前記基板の一方に供給する前記電源電圧と同程度の電圧を有する信号ライン、及び前記グランドラインを近接して配置する、
グランドラインの配索方法。 - 前記複数の基板は、少なくともマイクロコンピュータが実装された制御基板と、少なくとも電源電圧の平滑回路が実装された電源基板と、を含み、
前記グランドラインを、前記電源基板のグランドを経由して、前記制御基板のグランドに接続する、
請求項8又は請求項9に記載のグランドラインの配索方法。 - 前記複数の基板は、少なくともマイクロコンピュータが実装された制御基板と、少なくとも電源電圧の平滑回路が実装された電源基板と、を含み、
前記グランドラインを、前記制御基板のグランドを経由して、前記電源基板のグランドに接続する、
請求項8又は請求項9に記載のグランドラインの配索方法。 - 前記電源コネクタ、前記マイクロコンピュータ及び前記平滑回路が二重化された冗長系統を有し、
前記制御基板のグランドが、各系統間で共通する共通グランドとなっており、
各系統において、前記電源基板のグランドと前記制御基板の共通グランドとを接続する前記グランドラインに、当該グランドラインに流れる電流を検出する電流検出素子を配置した、
請求項10又は請求項11に記載のグランドラインの配索方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021004132 | 2021-01-14 | ||
| JP2021004132 | 2021-01-14 | ||
| PCT/JP2021/043558 WO2022153690A1 (ja) | 2021-01-14 | 2021-11-29 | 電子制御装置、及びグランドラインの配索方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2022153690A1 JPWO2022153690A1 (ja) | 2022-07-21 |
| JP7655950B2 true JP7655950B2 (ja) | 2025-04-02 |
Family
ID=82447144
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2022575110A Active JP7655950B2 (ja) | 2021-01-14 | 2021-11-29 | 電子制御装置、及びグランドラインの配索方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US12604393B2 (ja) |
| JP (1) | JP7655950B2 (ja) |
| CN (1) | CN116457266A (ja) |
| WO (1) | WO2022153690A1 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2024016442A (ja) * | 2022-07-26 | 2024-02-07 | 日立Astemo株式会社 | 電動駆動装置の制御装置 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016144380A (ja) | 2015-02-05 | 2016-08-08 | 日立オートモティブシステムズ株式会社 | 電動駆動装置及び電動パワーステアリング装置 |
| JP2017169405A (ja) | 2016-03-17 | 2017-09-21 | 株式会社ジェイテクト | モータ制御装置及び操舵制御装置 |
| WO2019159492A1 (ja) | 2018-02-13 | 2019-08-22 | 株式会社デンソー | 車両用装置、機能制御プログラム及び状態遷移制御プログラム |
| JP2020005480A (ja) | 2018-07-02 | 2020-01-09 | 日立オートモティブシステムズ株式会社 | 電動駆動装置及び電動パワーステアリング装置 |
| JP2020145856A (ja) | 2019-03-06 | 2020-09-10 | 日本電産モビリティ株式会社 | モータ制御ユニットおよびモータ |
| WO2021002374A1 (ja) | 2019-07-03 | 2021-01-07 | 日立オートモティブシステムズ株式会社 | 電子装置 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100922361B1 (ko) * | 2008-02-28 | 2009-10-19 | 삼성에스디아이 주식회사 | 플라즈마 디스플레이 장치 |
| KR102553177B1 (ko) * | 2016-06-13 | 2023-07-10 | 삼성전자주식회사 | 고주파 전송회로를 포함하는 전자 장치 |
| JP6605400B2 (ja) * | 2016-06-17 | 2019-11-13 | 日立オートモティブシステムズ株式会社 | 電子制御装置、車両および電子制御装置製造方法 |
| JP7124400B2 (ja) | 2018-04-10 | 2022-08-24 | 株式会社デンソー | 駆動装置 |
| JP6942679B2 (ja) * | 2018-09-21 | 2021-09-29 | キヤノン株式会社 | 伝送回路、電子機器、及び撮像装置 |
-
2021
- 2021-11-29 JP JP2022575110A patent/JP7655950B2/ja active Active
- 2021-11-29 CN CN202180076815.6A patent/CN116457266A/zh active Pending
- 2021-11-29 US US18/261,250 patent/US12604393B2/en active Active
- 2021-11-29 WO PCT/JP2021/043558 patent/WO2022153690A1/ja not_active Ceased
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016144380A (ja) | 2015-02-05 | 2016-08-08 | 日立オートモティブシステムズ株式会社 | 電動駆動装置及び電動パワーステアリング装置 |
| JP2017169405A (ja) | 2016-03-17 | 2017-09-21 | 株式会社ジェイテクト | モータ制御装置及び操舵制御装置 |
| WO2019159492A1 (ja) | 2018-02-13 | 2019-08-22 | 株式会社デンソー | 車両用装置、機能制御プログラム及び状態遷移制御プログラム |
| JP2020005480A (ja) | 2018-07-02 | 2020-01-09 | 日立オートモティブシステムズ株式会社 | 電動駆動装置及び電動パワーステアリング装置 |
| JP2020145856A (ja) | 2019-03-06 | 2020-09-10 | 日本電産モビリティ株式会社 | モータ制御ユニットおよびモータ |
| WO2021002374A1 (ja) | 2019-07-03 | 2021-01-07 | 日立オートモティブシステムズ株式会社 | 電子装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN116457266A (zh) | 2023-07-18 |
| US12604393B2 (en) | 2026-04-14 |
| US20240074034A1 (en) | 2024-02-29 |
| WO2022153690A1 (ja) | 2022-07-21 |
| JPWO2022153690A1 (ja) | 2022-07-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN105026246B (zh) | 车辆用转向装置 | |
| US11104375B2 (en) | Rotary electric machine control device and electric power steering apparatus using the same | |
| JP4618474B2 (ja) | 電動パワーステアリング装置 | |
| JP6999480B2 (ja) | 電子制御装置及びその診断方法 | |
| US11332184B2 (en) | Rotary electric machine control device and method | |
| JP7151695B2 (ja) | 電子制御装置、および、電源システム | |
| JP2000043749A (ja) | 操舵制御装置および操舵装置 | |
| JP2020205663A (ja) | 電源システム | |
| US11541930B2 (en) | Rotary electric machine control device | |
| JP3953932B2 (ja) | 電動パワーステアリング装置 | |
| JP7655950B2 (ja) | 電子制御装置、及びグランドラインの配索方法 | |
| US12587029B2 (en) | Power supply apparatus | |
| US8550205B2 (en) | Electric power steering system | |
| JP6914003B2 (ja) | 電子制御装置 | |
| JP3991643B2 (ja) | 車両用操舵装置 | |
| CN113471730B (zh) | 具有灵活电连接器位置的动力机组 | |
| JP2008296854A (ja) | 電動パワーステアリング装置のecu接地構造 | |
| WO2024024244A1 (ja) | 電動駆動装置の制御装置 | |
| JP2004168258A (ja) | 車両用操舵装置 | |
| JP2021035073A (ja) | 回転電機制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20230404 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240409 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240604 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240917 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20241111 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20250225 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20250321 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7655950 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |