JP2017189122A - 試料観察装置 - Google Patents
試料観察装置 Download PDFInfo
- Publication number
- JP2017189122A JP2017189122A JP2016079094A JP2016079094A JP2017189122A JP 2017189122 A JP2017189122 A JP 2017189122A JP 2016079094 A JP2016079094 A JP 2016079094A JP 2016079094 A JP2016079094 A JP 2016079094A JP 2017189122 A JP2017189122 A JP 2017189122A
- Authority
- JP
- Japan
- Prior art keywords
- optical system
- moving
- sample
- observation apparatus
- sample observation
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 230000003287 optical effect Effects 0.000 claims abstract description 143
- 238000003384 imaging method Methods 0.000 claims description 54
- 230000005540 biological transmission Effects 0.000 claims description 34
- 238000005286 illumination Methods 0.000 claims description 8
- 230000007246 mechanism Effects 0.000 description 40
- 230000009467 reduction Effects 0.000 description 18
- 238000001514 detection method Methods 0.000 description 17
- 230000033001 locomotion Effects 0.000 description 17
- 239000000470 constituent Substances 0.000 description 8
- 238000012423 maintenance Methods 0.000 description 6
- 230000000694 effects Effects 0.000 description 5
- 239000000758 substrate Substances 0.000 description 5
- 238000005452 bending Methods 0.000 description 4
- 230000001276 controlling effect Effects 0.000 description 4
- 239000002609 medium Substances 0.000 description 4
- 238000000034 method Methods 0.000 description 4
- 238000012545 processing Methods 0.000 description 4
- 238000004891 communication Methods 0.000 description 3
- WABPQHHGFIMREM-UHFFFAOYSA-N lead(0) Chemical compound [Pb] WABPQHHGFIMREM-UHFFFAOYSA-N 0.000 description 3
- 230000004044 response Effects 0.000 description 3
- 230000009471 action Effects 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 238000007667 floating Methods 0.000 description 2
- 239000001963 growth medium Substances 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 230000001105 regulatory effect Effects 0.000 description 2
- 239000011347 resin Substances 0.000 description 2
- 229920005989 resin Polymers 0.000 description 2
- 241000894006 Bacteria Species 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 238000012258 culturing Methods 0.000 description 1
- 238000009792 diffusion process Methods 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 244000005700 microbiome Species 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000035699 permeability Effects 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 238000007789 sealing Methods 0.000 description 1
- 230000008054 signal transmission Effects 0.000 description 1
Images














Classifications
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B21/00—Microscopes
- G02B21/36—Microscopes arranged for photographic purposes or projection purposes or digital imaging or video purposes including associated control and data processing arrangements
- G02B21/362—Mechanical details, e.g. mountings for the camera or image sensor, housings
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B13/00—Optical objectives specially designed for the purposes specified below
- G02B13/22—Telecentric objectives or lens systems
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/67—Focus control based on electronic image sensor signals
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N21/00—Investigating or analysing materials by the use of optical means, i.e. using sub-millimetre waves, infrared, visible or ultraviolet light
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B17/00—Systems with reflecting surfaces, with or without refracting elements
- G02B17/008—Systems specially adapted to form image relays or chained systems
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B21/00—Microscopes
- G02B21/24—Base structure
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B7/00—Mountings, adjusting means, or light-tight connections, for optical elements
- G02B7/02—Mountings, adjusting means, or light-tight connections, for optical elements for lenses
- G02B7/04—Mountings, adjusting means, or light-tight connections, for optical elements for lenses with mechanism for focusing or varying magnification
- G02B7/10—Mountings, adjusting means, or light-tight connections, for optical elements for lenses with mechanism for focusing or varying magnification by relative axial movement of several lenses, e.g. of varifocal objective lens
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/56—Cameras or camera modules comprising electronic image sensors; Control thereof provided with illuminating means
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Signal Processing (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Biochemistry (AREA)
- General Health & Medical Sciences (AREA)
- Immunology (AREA)
- Pathology (AREA)
- Microscoopes, Condenser (AREA)
- Apparatus Associated With Microorganisms And Enzymes (AREA)
- Investigating Or Analysing Materials By Optical Means (AREA)
Abstract
【課題】細胞等の試料に対し確実に焦点調節を行ない得ると共に歪みのない良好で高画質な観察画像を得ることのできる試料観察装置を提供する。【解決手段】光透過部12aを有する載置部12に培養器13を配置して培養器内の試料を観察する試料観察装置1において、試料を透過してきた光を反射する光学要素41と、撮像素子43aを含み光学要素からの光を撮像素子の撮像面に結像させるように光軸Oに沿う方向に移動する移動光学系(42、45)と、移動光学系の光軸に沿って移動光学系全体を移動させる駆動手段(46〜52、59)とを具備し、光学要素及び移動光学系は全体としてテレセントリック光学系を形成し、駆動手段によって移動光学系を移動させることで焦点位置を調整すると共に、移動光学系を光軸に沿う方向に移動させる際には画角が一定となるように構成されている。【選択図】図4
Description
この発明は、培養器内の細胞等の試料を観察する試料観察装置に関するものである。
従来、撮像光学系及び撮像素子等を含む撮像ユニットを、互いに直交するX軸及びY軸の二方向のそれぞれに直線的に移動させ、当該撮像ユニットをX−Y平面に平行な面内で自在に移動させ得る駆動機構等を備え、培養器内の細胞等の試料の全体像を自動的に走査することができると共に、培養器内の細胞等の試料の所望の部位を任意に観察することができるように構成された試料観察装置については、例えば特開平5−232047号公報、特開2008−92882号公報等によって、種々の形態のものが提案され、また実用化されている。
この種の試料観察装置等の光学装置においては、撮像光学系の光軸をプリズムや反射ミラー等を用いて折り曲げて、観察対象とする被検体からの光束を、当該被検体に対向する面とは異なる面上に結像させるように構成したいわゆる屈曲光学系を備えた光学装置、例えば観察装置や画像表示装置等が、従来種々の形態のものが提案され、また実用化されている。
例えば、特開2015−143861号公報によって開示されている画像表示装置は、屈曲光学系を全体的に繰り出して、当該屈曲光学系によって結像される実像を、上記屈曲光学系とミラー光学系との間に中間像として結像させ、曲面状のミラー光学系を用いて、上記中間像を物体像とする投射画像をスクリ−ン上に結像投射するというものである。この画像表示装置においては、画像の中心と周辺のピントずれを補正する機能を有すると共に、投射画像全体のピントボケを補正する機能を有して構成されている。
ところが、上記特開2015−143861号公報等によって開示されている光学装置においては、曲面状のミラー光学系を採用していることから、形成される画像には、例えば台形状の歪みが生じるという問題点がある。
そこで、上記公報によって開示されている光学装置では、フローティングフォーカス方式を採用することにより、複数のレンズ群のそれぞれを異なる繰出量で異なる方向へと移動させて、実質的に全体繰り出しと同じ効果、即ち歪みの少ない効果を得るといった工夫がなされている。しかしながら、フローティングフォーカス方式を採用することにより、フォーカス制御が複雑化してしまうという問題点がある。
また、一般的な試料観察装置は、いわゆるインキュベーター(incubator)等と呼ばれる恒温器の内部に格納した状態で使用される。この場合において、当該試料観察装置上には、観察対象とする試料を装填した培養器を載置した状態で、恒温槽内に格納されることになる。このとき、試料観察装置自体の高さ方向のサイズ(寸法)が大きいと、培養器を載せた状態の試料観察装置を、恒温槽の内部に格納することができなくなってしまう可能性が生じる。また、試料観察装置の使用時には、当該試料観察装置に載置した培養器内の培地を所定の期間毎に交換若しくは補充するといった保守作業を伴うことがある。試料観察装置自体の高さ方向のサイズが大きいと、この種の保守作業を行う際に、支障が生じてしまう可能性も考えられる。そこで、この種の試料観察装置においては、高さ方向のサイズ(寸法)をできるだけ詰めた形態とする装置の薄型化が望まれている。
しかしながら、従来の試料観察装置において、例えば培養器の底面側に撮像ユニットを設けて、観察対象物を入れた培養器の底面側から上方に向けた撮像光学系を用いて観察を行うように構成した形態のものでは、装置の高さ方向のサイズが大きくなってしまう傾向がある。この形態を採用した場合、例えば、撮像ユニットに含まれる撮像光学系の光軸は、試料観察装置の高さ方向に沿う方向に形成されることになることから、装置の高さ方向のサイズが大きくなってしまう傾向がある。これに加えて、さらに、焦点調節動作のために撮像光学系の光軸方向への移動空間を確保する必要が生じるので、装置の薄型化のためには不利な構成となっている。
本発明は、上述した点に鑑みてなされたものであって、その目的とするところは、焦点調節が可能な撮像光学系と撮像素子とを有する撮像ユニットを互いに直交するX軸及びY軸の二方向にそれぞれ直線的に移動させ、当該撮像ユニットをX−Y平面に平行な面内で自在に移動させ得る駆動機構を具備し培養器の底面側に撮像ユニットを設けた形態の試料観察装置において、装置の高さ方向のサイズを抑止して装置の薄型化を実現すると同時に、観察対象物である細胞等の試料に対し確実に焦点調節を行なうことができ、かつ歪みのない良好で高画質な観察画像を得ることのできる試料観察装置を提供することである。
上記目的を達成するために、本発明の一態様の試料観察装置は、光透過部を有する載置部に培養器を配置して、当該培養器内の試料を観察する試料観察装置において、上記試料を透過してきた光を反射する光学要素と、撮像素子を含み上記光学要素からの光を上記撮像素子の撮像面に結像させるように光軸に沿う方向に移動する移動光学系と、上記移動光学系の光軸に沿って当該移動光学系全体を移動させる駆動手段とを具備し、上記光学要素及び上記移動光学系は、全体としてテレセントリック光学系を形成し、上記駆動手段によって上記移動光学系を移動させることで焦点位置を調整すると共に、上記移動光学系を光軸に沿う方向に移動させる際には画角が一定となるように構成されている。
本発明によれば、焦点調節が可能な撮像光学系と撮像素子とを有する撮像ユニットを互いに直交するX軸及びY軸の二方向にそれぞれ直線的に移動させ、当該撮像ユニットをX−Y平面に平行な面内で自在に移動させ得る駆動機構を具備し培養器の底面側に撮像ユニットを設けた形態の試料観察装置において、装置の高さ方向のサイズを抑止して装置の薄型化を実現すると同時に、観察対象物である細胞等の試料に対し確実に焦点調節を行なうことができ、かつ歪みのない良好で高画質な観察画像を得ることのできる試料観察装置を提供することができる。
以下、図示の実施の形態によって本発明を説明する。以下の説明に用いる各図面は模式的に示すものであり、各構成要素を図面上で認識可能な程度の大きさで示すために、各部材の寸法関係や縮尺等を各構成要素毎に異ならせて示している場合がある。したがって、本発明は、これら各図面に記載された構成要素の数量や構成要素の形状や構成要素の大きさの比率や各構成要素の相対的な位置関係等に関し、図示の形態のみに限定されるものではない。
[一実施形態]
図1は、本発明の一実施形態の試料観察装置を含む試料観察システムの全体構成の概略を示すシステム構成図である。図2は、本実施形態の試料観察装置の外観を示す外観斜視図である。図3は、図2の試料観察装置から培養器(培養フラスコ)を取り外した状態を示す外観斜視図である。
図1は、本発明の一実施形態の試料観察装置を含む試料観察システムの全体構成の概略を示すシステム構成図である。図2は、本実施形態の試料観察装置の外観を示す外観斜視図である。図3は、図2の試料観察装置から培養器(培養フラスコ)を取り外した状態を示す外観斜視図である。
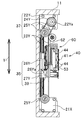
図4〜図9は、図2の試料観察装置の蓋体を取り外して、その内部構成を示す図である。このうち図4は、外観斜視図である。図5は、上面側から見た平面図である。図6は、図5の[6]−[6]線に沿う断面図である。図7は、図5の[7]−[7]線に沿う断面図である。図8は、図5の[8]−[8]線に沿う断面図である。図9は、図5の[9]−[9]線に沿う断面図である。
図10〜図14は、図2の試料観察装置における第2移動部材のみを取り出して示す図である。このうち図10は、主に上面側を示す外観斜視図である。図11は、主に裏面側を示す外観斜視図である。図12は、上面側から見た平面図である。図13は、図12の[13]−[13]線に沿う断面図である。図14は、主に移動光学系の保持構造を示すために、当該部位を拡大して示す要部拡大断面図である。なお、図14は、図5の[14]−[14]線に沿う断面である。
図15は、本実施形態の試料観察装置において培養器を取り付けて使用する際の状態を示す断面図である。なお、図15は、培養器を取り付けた状態の試料観察装置において、図5の[8]−[8]線に沿う断面に相当する。
まず、本発明の一実施形態の試料観察装置の詳細構成を説明する前に、本実施形態の試料観察装置を含む試料観察システムの全体構成の概略を、主に図1を用いて以下に説明する。
本実施形態の試料観察装置1を含む試料観察システム100は、本実施形態の試料観察装置1と、恒温器101と、制御装置102と、入力装置103及び表示装置104等によって主に構成されている。
本実施形態の試料観察装置1は、恒温器101の内部に格納載置された状態で使用される。この恒温器101は、温度を一定に保つ機能を有する装置であり、いわゆるインキュベーター(incubator)と呼ばれるものである。恒温器101としては、様々な形態のものが存在するが、従来一般に実用化され広く利用されているものを適用するものとし、その詳細な構成の説明は省略する。
制御装置102は、本実施形態の試料観察装置1との間で、例えば接続ケーブル等の有線接続手段(USB(Universal Serial Bus;ユニバーサルシリアルバス)接続等)若しくは不図示の無線接続手段等を介して電気的に接続され、当該試料観察装置1の動作を制御したり、当該試料観察装置1によって取得される画像データを受信したり、この受信した画像データを記憶媒体に記憶したり、また受信した画像データについての解析や分析等、各種の画像信号処理等を実行するほか、上記試料観察装置1への給電を行うための装置である。制御装置102としては、例えば広く一般に普及している小型パーソナルコンピュータ等を適用することができる。そのためには、それらに適合した各種の制御プログラムを適宜用意することにより運用が可能である。
なお、試料観察装置1への給電については、制御装置102を介した給電手段に限らず、不図示の電源ケーブルを用いて上記恒温器101の外部に設けられる商用電源から給電を行うようにしてもよいし、恒温器101内若しくは外部に設置した蓄電池等からの給電をおこなうようにしてもよい。
上記制御装置102には、その周辺機器としての入力装置103及び表示装置104等が電気的に接続されている。入力装置103は、使用者(ユーザ)により指示を制御装置102に対して入力するためのデバイスである。入力装置103の形態としては、例えばキーボードのほか、マウスやトラックボール、ジョイスティック等のポインティングデバイス等がある。使用者(ユーザ)は、これらの入力装置103を用いて、制御装置102への制御指示入力や各種の信号処理のための指示入力を行うことができる。
表示装置104は、制御装置102によって動作する制御プログラムに基く各種の表示や、上記試料観察装置1によって取得され、制御装置102によって受信された画像データ等に基く画像等を視覚的に表示するための装置である。表示装置104としては、広く一般に普及している液晶表示モニタ等を適用し得る。
次に、本実施形態の試料観察装置1の詳細な構成を、図2〜図14を用いて以下に説明する。
本実施形態の試料観察装置1は、内部に設けられる撮像ユニット40等を互いに直交するX軸及びY軸の二方向にそれぞれ直線的に移動させ、当該撮像ユニット40等をX−Y平面に平行な面内で自在に移動させ得る駆動機構を具備する試料観察装置である。この試料観察装置1は、光透過部12aを有する載置部に培養器13を配置して、当該培養器13内の試料を観察するように構成されている。
なお、以下の説明において、図2等に示すように、当該試料観察装置1における箱体10(後述)の長辺に沿う方向をX軸というものとし、このX軸に沿う方向を第1の方向というものとする。また、同箱体10の短辺に沿う方向であって、上記X軸に直交する方向をY軸というものとし、このY軸に沿う方向を第2の方向というものとする。
そのために、本実施形態の試料観察装置1は、図2、図3に示すように、密閉された直方体形状の箱体10と、この箱体10の一面に載置される培養器13とによって構成されている。なお、図3は、培養器13を取り外した状態を示しているので、図3においては培養器13は不図示である。
箱体(case)10は、一面に開口を有する筐体(chassis)11と、この筐体11の開口を水密的に覆う蓋体12(lid)とによって構成される。筐体11の内部には、詳細は後述するが、当該試料観察装置1における各種の構成部材が収納配置されている。また、筐体11の一側面(前面側)の外壁面には、複数の接続コネクタ16、17が配設されている。この複数の接続コネクタ16、17としては、例えば当該試料観察装置1に対する電力供給を行うための電源ケーブルや、当該試料観察装置1への制御信号若しくは当該試料観察装置1から出力されるデータ信号を含む各種の信号等の伝達を行うための信号伝達ケーブル(例えばUSBケーブル等)等に対応したコネクタである。
これら複数の接続コネクタ16、17は、筐体11の内部に配設され、それぞれに各対応する電気基板(図4等においては不図示。後述する図15の符号55参照)に接続されている。この電気基板(55;図15)には、例えば電源回路や通信回路等が実装されている。
なお、上記筐体11において、上記複数の接続コネクタ16、17が配設されている一側面の壁面を前壁面というものとする。そして、以下の説明において、上記前壁面に対して直交して設けられ、互いに対向して配設される二つの側壁について、それぞれを第1の側壁11a、第2の側壁11bというものとする(図4参照)。また、筐体11の開口に対向する面を底面というものとする。
蓋体12は、光透過部12aを有して構成され、培養器13を載置するための載置部である。上記光透過部12aは、例えば矩形状の貫通孔である窓部と、この窓部に嵌合配置されガラス素材若しくは樹脂製素材等を用いて形成される光透過性を有する透明薄板部材とによって形成されている。
培養器13は、培地を作り細菌等の微生物、細胞等の試料を培養するための箱型形状からなる容器である。この培養器13は、上記試料観察装置1の使用時には、箱体10の蓋体12の光透過部12a上に載置される。
上記培養器13は、これを上記光透過部12a上に載置したときに、当該光透過部12aに対向する側、即ち培養器13の底面側が平皿状に形成され、かつ当該平皿状底面は透明薄板状に形成されている。上記培養器13の底面以外のその他の面も表面が平面をなし、光を反射し得るような反射面が形成されている。この反射面は、当該試料観察装置1の箱体10の内部に設けられる照明光源から出射され上記光透過部12aを介して当該培養器13内に入射してくる照明光を受けて、これを反射するものである。これにより、当該培養器13の上記平皿状底面内の細胞等の試料は、上記反射面からの照明光によって照明されるので、当該試料観察装置1においては、培養器13内の細胞等の試料を透過光によって観察することができるように構成されている。
また、蓋体12には、複数の操作部材14と、複数の状態表示部15とが設けられている。上記複数の操作部材14は、例えば当該試料観察装置1を恒温器101内に設置する前に、当該試料観察装置1内の被被駆動ユニット(撮像ユニット40等;詳細後述)の箱体10内部での位置調整等を手動操作により行うための操作スイッチ等である。上記複数の状態表示部15は、例えば上記複数の操作部材14の一つを操作した時に点灯表示される等によって、どの操作部材が操作されたかの状態を表示するために設けられる部材である。そのために、上記複数の状態表示部15のそれぞれは、上記複数の操作部材14に対応して各近傍に設けられている。上記複数の状態表示部15としては、例えばLED(light emitting diode;発光ダイオード)等の発光体等が適用されている。
これら複数の操作部材14と複数の状態表示部15とは、筐体11の内部に配設され、それぞれに各対応する電気基板(図4等においては不図示。後述する図15の符号54参照)に接続されている。この電気基板(54;図15)には、例えば操作部材の操作入力を受けるスイッチ部材やその入力信号を処理する信号処理回路のほか、状態表示用部材(LED)の駆動回路等が実装されている。
箱体10は密閉構造、即ち水密構造を有して構成されている。そのために、筐体11には、図4等に示すように、シール部材18が設けられている。このシール部材18は、筐体11に対してその開口を覆う様に蓋体12を配置したとき、蓋体12の内面が密着する部位において筐体11の開口の周縁部に沿って配置されている。そして、筐体11に対して蓋体12を配置した時、シール部材18が蓋体12の内面に密着することで、蓋体12は、筐体11の開口を水密的に覆う。このような形態により箱体10の水密構造が構成されている。
箱体10(筐体11)の内部には、図4〜図9等に示すように、撮像ユニット40等を含む被駆動ユニット60と、この被駆動ユニット60をX−Y平面に平行な面内で自在に移動させるための駆動機構等が配設されている。
被駆動ユニット60は、詳細は後述するが、撮像光学系(41、42、45等)とその駆動機構(46、47、49、59等)と、撮像素子43aを含む撮像部43及び光源部44(図7参照)とその駆動回路を実装した電気基板62(図8参照)等を含んで構成される撮像ユニット40と、この撮像ユニット40を搭載する移動部材であって後述する第2の移動部材である第2テーブル29Yとを含んで構成される。なお、被駆動ユニット60の詳細構成については、図10〜図13等を用いて後述する。
箱体10(筐体11)の内部において、上記被駆動ユニット60をX−Y平面に平行な面内で移動させる駆動機構は、第1ガイドレール30X(第1のガイド部、第1のガイド手段)と、第2ガイドレール30Y(第2のガイド部、第2のガイド手段)と、第1テーブル29X(第1の移動部材)と、第2テーブル29Y(第2の移動部材)と、第1の駆動モータ21Xと、第2の駆動モータ21Yと、伝達機構35と、第1の駆動力伝達手段36と、第2の駆動力伝達手段37と、第1位置検出手段(31X、32X)及び第2位置検出手段(31Y、32Y)と、第1位置規制手段33X及び第2位置規制手段33Y等によって構成されている。
第1ガイドレール30Xは、第1の方向であるX軸方向に沿って延びるように配設され、第1テーブル29XのX軸方向への移動をガイドする第1のガイド部であり第1のガイド手段である。第1ガイドレール30Xは、筐体11の内部において複数設けられている。本実施形態においては、第1ガイドレール30Xを二本設けた例を示している。この場合において、二本の第1ガイドレール30Xのうち一方は側壁11aに隣接する位置において、同側壁11aに沿って所定の範囲に設けられている。また、二本の第1ガイドレール30Xのうち他方は側壁11bに隣接する位置において、同側壁11bに沿って所定の範囲に設けられている。
なお、後述するように、筐体11の内部において、側壁11aに隣接する位置には、同側壁11aに沿うように第1の駆動モータ21Xが設けられている。同様に、筐体11の内部において、側壁11bに隣接する位置には、同側壁11bに沿うように第2の駆動モータ21Yが設けられている。したがって、二本の第1ガイドレール30Xは、上記第1の駆動モータ21X及び第2の駆動モータ21Yが配設されている各側壁11a、11bの隣接位置以外の各側壁11a、11bの隣接位置に設けられている。これにより、第1の駆動モータ21Xと一方の第1ガイドレール30Xとは、それぞれの長軸方向が直線的に、側壁11aに沿うように並べて配設されている。同様に、第2の駆動モータ21Yと他方の第1ガイドレール30Xとは、それぞれの長軸方向が直線的に、側壁11bに沿うように並べて配設されている。
第1テーブル29Xは、第1ガイドレール30Xによってガイドされて、同第1ガイドレール30Xに沿うX軸方向に移動する第1の移動部材である。この第1テーブル29Xは、後述する第1の駆動モータ21Xの回転駆動力により駆動される。そのために、第1テーブル29XのY軸方向における両端部の各下面側には、図9に示すように、第1ガイドレール30Xを摺動可能に保持する第1レール保持部29Xaが設けられている。この第1レール保持部29Xaは、X軸方向に延びるように配設されている。そして、当該第1レール保持部29Xaは、第1ガイドレール30Xの幅方向(軸方向に直交する方向)を抱え込み得る形態の溝形状部を有して形成されている。このような構成により、第1テーブル29Xは、第1ガイドレール30Xにガイドされ、これに沿う方向であるX軸方向にのみ移動するように構成されている。
第2ガイドレール30Yは、X軸方向に垂直な第2の方向(Y軸方向)に沿って延びるように配設され、第2テーブル29YのY軸方向への移動をガイドする第2のガイド部であり第2のガイド手段である。第2ガイドレール30Yは、筐体11の内部において、上記第1テーブル29X上に載置される形態で複数設けられている。本実施形態においては、第2ガイドレール30Yを二本設けた例を示している。この場合において、二本の第2ガイドレール30Yは、上記第1テーブル29X上において、X軸方向に所定の間隔を置いて並べて配置されている。
第2テーブル29Yは、第2ガイドレール30Yによってガイドされて、同第2ガイドレール30Yに沿ってY軸方向に移動する第2の移動部材である。また、第2テーブル29Yは、第1テーブル29Xと共にX軸方向にも移動するように構成されている。そのために、第2テーブル29Yの下面側には、図8に示すように、二本の第2ガイドレール30Yをそれぞれ摺動可能に保持する第2レール保持部29Yaが設けられている。この第2レール保持部29Yaは、Y軸方向に延びるように配設されている。そして、当該第2レール保持部29Yaは、第2ガイドレール30Yの幅方向(軸方向に直交する方向)を抱え込み得る形態の溝形状部を有して形成されている。このような構成により、第2テーブル29Yは、第2ガイドレール30Yによってガイドされて、同第2ガイドレール30Yに沿ってY軸方向に移動すると共に、第1テーブル29Xが第1ガイドレール30Xによってガイドされて、同第1ガイドレール30Xに沿ってX軸方向に移動する際には、当該第1テーブル29Xと共に同方向(X軸方向)に移動する。
そして、上述したように、上記第2テーブル29Yには、撮像部43を含む撮像ユニット40等が搭載されている。これにより、上記第2テーブル29Yは、被駆動ユニット60の一部として機能する。
第1の駆動モータ21Xは、第1テーブル29XをX軸方向に移動させ駆動するための回転力を出力する第1の回転軸21Xa(図5参照)を有する駆動モータである。第1の駆動モータ21Xは、上述したように、箱体10(筐体11)の第1の側壁11aに隣接して設けられている。この場合において、第1の回転軸21Xaは、第1ガイドレール30Xと平行に配置されている。上記第1の駆動モータ21Xの上記第1の回転軸21Xaから出力される回転駆動力は、第1の駆動力伝達手段36を介して第1テーブル29Xへと伝達されて、当該第1テーブル29XをX軸方向へと移動させるように構成されている。
第1の駆動力伝達手段36は、第1の駆動モータ21Xからの回転出力を第1テーブル29X(第1の移動部材)に伝達する駆動力伝達機構である。第1の駆動力伝達手段36は、第1減速手段22Xと、送りねじ23Xと、送りナット24Xとによって構成されている。
第1減速手段22Xは、第1の駆動モータ21Xの第1の回転軸21Xaからの回転出力を受けて減速するギアー列等を内部に有する構成ユニットである。第1減速手段22Xの構成自体は、従来一般に周知の動力減速手段と同様のものが適用されているものとして、その詳細説明は省略する。
送りねじ23Xは、上記第1減速手段22Xからの回転出力を受けて回転する棒状部材である。この送りねじ23Xの基端は上記第1減速手段22Xに連結されている。また、当該送りねじ23Xの他端は、筐体11の内壁面の固定部に対し回転を許容しながら回動自在に軸支されている。
送りナット24Xは、上記送りねじ23Xに螺合するナット部を内部に備え、上記第1テーブル29Xに固定される構成部である。この構成により、第1の駆動モータ21Xの回転出力を受けて上記送りねじ23Xが回転すると、当該送りねじ23Xに螺合するナット部の作用により、送りナット24XはX軸に沿う方向に移動する。これと同時に第1テーブル29Xも同方向に移動する。この場合において、第1の駆動モータ21Xの回転方向を制御することにより、送りナット24Xの回転方向を制御して、これにより第1テーブル29XのX軸に沿う方向における進退方向を制御することができる。
つまり、第1テーブル29Xは、第1の駆動モータ21X及び送りねじ23X、送りナット24X等を用いた送りねじ駆動方式により、第1の駆動モータ21Xの第1の回転軸21Xaに平行な方向(X軸方向)に移動する。
第2の駆動モータ21Yは、第2テーブル29YをY軸方向に移動させ駆動するための回転力を出力する第2の回転軸22Ya(図7参照)を有する駆動モータである。第2の駆動モータ21Yは、箱体10(筐体11)の第1の側壁11aと対向する第2の側壁11bに隣接して設けられている。この場合において、第2の回転軸22Yaが第1ガイドレール30X及び第1の回転軸21Xaと平行となるように配置されている。
上記第2の駆動モータ21Yの上記第2の回転軸21Yaから出力される回転駆動力は、第2の駆動力伝達手段37及び伝達機構35を介して撮像部43を含む撮像ユニット40等を搭載する第2テーブル29Yへと伝達されて、これ(第2テーブル29Y)をY軸方向へと移動させるように構成されている。
換言すると、第2テーブル29Yは、第2の駆動モータ21Yからの回転力を伝達する第2の駆動力伝達手段37に含まれる伝達機構35を介してY軸方向に移動する。
第2の駆動力伝達手段37は、第2の駆動モータ21Yからの回転出力を撮像部43が搭載される第2テーブル29Y(第2の移動部材)に伝達する駆動力伝達機構である。第2の駆動力伝達手段37は、第2減速手段22Yと、駆動ベルト23Yと、複数のプーリ24Y、25Yと、伝達機構35を含んで構成されている。
第2減速手段22Yは、第2の駆動モータ21Yの第2の回転軸21Yaからの回転出力を受けて減速するギアー列等を内部に有する構成ユニットであり、上記第1減速手段22Xと略同様の構成ユニットである。したがって、第2減速手段22Yにおいても、その構成自体は、従来一般に周知の動力減速手段と同様のものが適用されているものとして、その詳細説明は省略する。
駆動ベルト23Y及び複数のプーリ24Y、25Yは、上記第2減速手段22Yからの回転出力を受けて、これをY軸方向の移動出力に変換する構成部材である。複数のプーリ24Y、25Yのうちプーリ24Yは第2減速手段22Yからの回転出力を出力する軸部材に同軸上に固設されている。各プーリ24Y、25Yには、駆動ベルト23Yが張架されていて、第2の駆動モータ21Yの回転出力を受けて移動する駆動ベルト23Yの移動をガイドすると共に、駆動ベルト23Yの位置決め等を行っている。駆動モータの回転出力を駆動ベルトによって変換する機構は、従来周知であるので、これ以上の詳細説明は省略する。
そして、駆動ベルト23Yの所定の部位には、上記伝達機構35の一部が固定配置されている。この構成により、第2の駆動モータ21Yの回転出力を受けて駆動ベルト23YがY軸に沿う方向に移動すると、上記伝達機構35も同方向に移動するように構成されている。この場合において、第2の駆動モータ21Yの回転方向を制御することにより、駆動ベルト23Yの送り方向及び伝達機構35のY軸に沿う方向における進退方向を制御することができる。
つまり、伝達機構35は、第2の駆動モータ21Y及び駆動ベルト23Y等を用いたベルト駆動方式により、第2の駆動モータ21Yの第2の回転軸21Yaに直交する方向(Y軸方向)に移動する。
上記伝達機構35は、第3ガイドレール28Y(第3のガイド部、第3のガイド手段)と、ベルト保持部26Y及び第3テーブル27Yからなる第3の移動部材と、連結部材39とによって構成される。
第3ガイドレール28Yは、第2ガイドレール30Yと平行に配置され、第3の移動部材(26Y、27Y)のY軸方向への移動をガイドする第3のガイド部であり第3のガイド手段である。
上記第3の移動部材は、第2の駆動モータ21Yからの回転力を受けて、上記第3ガイドレール28Yに沿ってY軸方向に移動する移動部材である。上記第3の移動部材は、ベルト保持部26Y及び第3テーブル27Yとからなる。ベルト保持部26Yは、上記駆動ベルト23Yの所定の部位(図4において符号26Yaで示す固定部位)に固定される構成部材である。第3テーブル27Yは、第3ガイドレール28Yによってガイドされて、同第3ガイドレール28Yに沿うY軸方向に移動する移動部材である。そのために、上記第3テーブル27Yの下面側には、図8に示すように、第3ガイドレール28Yを摺動可能に保持する第3レール保持部27Yaが設けられている。この第3レール保持部27Yaは、Y軸方向に延びるように配設されている。そして、当該第3レール保持部27Yaは、第3ガイドレール28Yの幅方向(軸方向に直交する方向)を抱え込み得る形態の溝形状部を有して形成されている。このような構成により、第3テーブル27Yは、第3ガイドレール28Yによってガイドされて、同第3ガイドレール28Yに沿ってY軸方向に移動する。
上記第3テーブル27Yには、上記ベルト保持部26Yが固定されている。上述したように、ベルト保持部26Yは、駆動ベルト23Yの固定部位26Yaにおいて固定されている。したがって、この構成により、駆動ベルト23Yが第2の駆動モータ21Yの回転出力を受けてY軸に沿う方向に移動すると、上記第3テーブル27Yもまた同方向に移動するように構成されている。
連結部材39は、上記第3の移動部材の第3テーブル27Yと、上記撮像部43を含む撮像ユニット40等を搭載する第2テーブル29Yと、を連結する部材である。連結部材39の一端は第3テーブル27Yに固定され、同連結部材39の他端側には第2テーブル29YがX軸方向に移動可能に保持されている(図6等参照)。
このように、上記第3の移動部材(の第3テーブル27Y)と上記第2テーブル29Yとが連結部材39によって連結されているので、第2の駆動モータ21Yからの出力に基づいて第3の移動部材(26Y、27Y)が第3ガイドレール28Yに沿って移動する際、上記第2テーブル29Yは、上記第3の移動部材(26Y、27Y)の第3ガイドレール28Yに沿うY軸方向の移動に連動して、第2ガイドレール30Yに沿ってY軸方向に移動する。
第1位置検出手段は、第1テーブル29XのX軸方向における移動範囲の両端位置を検出し、当該第1テーブル29XのX軸方向における移動範囲を制御するために設けられる構成部である。この第1位置検出手段は、一対の第1位置検出センサ31Xと、第1遮光羽根32Xとによって構成されている。一対の第1位置検出センサ31Xは、第2の側壁11bの内壁面にX軸方向に所定の間隔をおいて配置されている。本実施形態においては、上記一対の第1位置検出センサ31Xとして、例えばいわゆる透過型フォトインタラプタ等の検出素子を適用した例を示している。第1遮光羽根32Xは、第1テーブル29X上に配設されている。この場合において、上記第1遮光羽根32Xは、第1テーブル29XがX軸方向に移動したときに上記一対の第1位置検出センサ31Xのそれぞれに対応する位置に配設されている(図4等参照)。
第1位置規制手段33Xは、第1テーブル29XのX軸方向の移動を所定の範囲内となるように規制するために設けられる部材である。第1位置規制手段33Xは、第1テーブル29XがX軸方向に移動したときに当接する位置に設けられる。つまり、第1テーブル29XがX軸方向において一方向の移動時に当接する位置と、他方向の移動時に当接する位置との二箇所に設けられる。これにより、第1テーブル29XのX軸方向の移動範囲が規制される。本実施形態においては、第1位置規制手段33Xの具体的な形態として、例えば筐体11の底面から当該筐体11の内方(即ち上方)に向けて突設される突起状部材を設けた例を示している(図4等参照)。
第2位置検出手段は、第3テーブル27YのY軸方向における移動範囲の両端位置を検出し、当該第3テーブル27YのY軸方向における移動範囲を制御するために設けられる構成部である。この第2位置検出手段は、一対の第2位置検出センサ31Yと、第2遮光羽根32Yとによって構成されている。一対の第2位置検出センサ31Yは、筐体11の底面において、第3ガイドレール28Yの近傍位置に当該第3ガイドレール28Yに沿うY軸方向に所定の間隔をおいて配置されている。本実施形態においては、上記一対の第2位置検出センサ31Yとして、例えばいわゆる透過型フォトインタラプタ等の検出素子を適用した例を示している。第2遮光羽根32Yは、第3テーブル27Y上に配設されている。この場合において、上記第2遮光羽根32Yは、第3テーブル27YがY軸方向に移動したときに上記一対の第2位置検出センサ31Yのそれぞれに対応する位置に配設されている(図4等参照)。
第2位置規制手段33Yは、第3テーブル27YのY軸方向の移動を所定の範囲内となるように規制するために設けられる部材である。第2位置規制手段33Yは、第3テーブル27YがY軸方向に移動したときに当接する位置に設けられる。つまり、第3テーブル27YがY軸方向において一方向の移動時に当接する位置と、他方向の移動時に当接する位置との二箇所に設けられる。これにより、第3テーブル27YのY軸方向の移動範囲が規制される。本実施形態においては、第2位置規制手段33Yの具体的な形態として、例えば筐体11の底面から当該筐体11の内方(即ち上方)に向けて突設される突起状部材を設けた例を示している(図4等参照)。
次に、上記被駆動ユニット60の詳細構成について、図10〜図15等を用いて以下に説明する。
被駆動ユニット60は、上述したように、撮像ユニット40と、この撮像ユニット40を搭載する第2の移動部材である第2テーブル29Yとを含んで構成される。
撮像ユニット40は、プリズム41(光学要素)と、撮像部43を含む移動光学系(42、45)と、その駆動機構である駆動手段(46〜52、59)と、光源部44と、電気基板62等を有して構成されている。
上記プリズム41は、培養器13内の試料を透過してきた光を反射する反射面41aを有する光学要素である。つまり、本実施形態におけるプリズム41は、箱体10の蓋体12上の所定の部位(光透過部12a)に載置した培養器13内の試料を透過してきた光を受けて、その光路を角度90度折り曲げて、所定の方向、即ち撮像素子43aの受光面(不図示)に向けて反射させる機能を有する。このプリズム41は、光を反射するのみの機能を有し、光の屈折を伴わない部材、即ちレンズ効果を有していない部材が適用される。このプリズム41は、第2テーブル29Y上に固設されている。
本実施形態においては、上記反射面を有する光学要素の形態として、プリズムを使用する例を挙げているが、この形態以外にも、例えば反射ミラーを適用した構成例を考えることも可能である。
移動光学系(42、45、43)は、プリズム41(光学要素)からの光を撮像素子43aの受光面へと結像させるように光軸Oに沿う方向に移動可能に構成された構成ユニットである。なお、本実施形態において、移動光学系の光軸Oは、X軸に沿う方向となるように配置されている。したがって、移動光学系は、X軸方向に進退移動し得るように構成されている。
上記移動光学系は、複数の光学レンズ42と、これら複数の光学レンズ42を保持する複数のレンズ保持部材45とを一体に構成した光学部と、撮像素子43aや撮像基板43b等を含む撮像部43と、を一体に構成した構成ユニットである。
なお、上記プリズム41と、上記複数の光学レンズ42及び複数のレンズ保持部材45とによって構成される構成部を撮像光学系というものとする。そして、上記プリズム41(光学要素)及び移動光学系によって構成される上記撮像光学系は、全体としてテレセントリック光学系を形成している。
上記移動光学系(42、45、43)は、上記第2テーブル29Y上において、X軸方向に移動可能に配設されている。そのために、上記第2テーブル29Y上には、上記移動光学系のX軸方向への移動をガイドするガイド手段であるフォーカスレール51が複数(本実施形態では二本)設けられている。このフォーカスレール51は、上記第2テーブル29Y上においてX軸方向に沿って延びるように配設されている。
これに対応させて、上記移動光学系は、上記フォーカスレール51を摺動可能に保持するフォーカスレール保持部59aを有する移動光学系保持部59によって保持されている(図9、図14参照)。
この移動光学系保持部59は、当該移動光学系の駆動機構(詳細後述)の一部を構成する構成部材である。この移動光学系保持部59の下面側には、上記フォーカスレール保持部59aが固定配置されている。そして、上記フォーカスレール保持部59aは、フォーカスレール51の幅方向(軸方向に直交する方向)を抱え込み得る形態の溝形状部を有して形成されている。上記フォーカスレール保持部59aは、上記二本のフォーカスレール51に対応させて二個設けられている。このような構成により、上記移動光学系は、上記フォーカスレール51によってガイドされて、同フォーカスレール51に沿うX軸方向にのみ移動する。その場合において、上記移動光学系は、後述するフォーカス駆動モータ46の回転駆動力により駆動される。
上記移動光学系の駆動機構は、移動光学系(42、45)全体を、当該移動光学系の光軸Oに沿って移動させるための駆動手段である。
上記移動光学系の駆動機構は、フォーカス駆動モータ46と、フォーカス減速機構47と、フォーカス回転出力軸48と、フォーカスナット49と、付勢ばね51と、移動光学系保持部59等によって構成される。
フォーカス駆動モータ46は、上記移動光学系をX軸方向に進退移動させるための駆動源である。このフォーカス駆動モータ46は、支持部材である第2テーブル29Y上に固設されている。その場合において、当該フォーカス駆動モータ46の回転軸(不図示)は、X軸に沿う方向に配置されている。
フォーカス減速機構47は、フォーカス駆動モータ46の回転軸からの回転出力を受けて減速するギアー列等を内部に有する構成ユニットである。フォーカス減速機構47の構成自体は、従来一般に周知の動力減速手段と同様のものが適用されているものとして、その詳細説明は省略する。なお、このフォーカス減速機構47も、支持部材である第2テーブル29Y上に固設されている。
フォーカス回転出力軸48は、上記フォーカス減速機構47からの回転力を出力する回転軸であって、例えば送りねじ形状に形成されている。このフォーカス回転出力軸48は、上記フォーカス減速機構47と後述のフォーカスナット49との間を連結し、フォーカス駆動モータ46の回転駆動力をフォーカスナット49へと伝達する役目をする。
フォーカスナット49は、上記フォーカス駆動モータ46の回転出力によって、X軸方向に進退移動する被駆動部材である。このフォーカスナット49は、上記送りねじ形状のフォーカス回転出力軸48に螺合するナット部を内部に備え、上記第2テーブル29Y上に固設されている構成部である。このフォーカスナット49は、支持部材である第2テーブル29Yに対してX軸方向に移動可能に設けられている。
この構成により、フォーカス駆動モータ46の回転出力を受けて、上記フォーカス回転出力軸48(送りねじ)が回転すると、当該フォーカス回転出力軸48に螺合するナット部の作用により、上記フォーカスナット49は、X軸に沿う方向に移動する。ここで、フォーカスナット49(被駆動部材)は、上記移動光学系保持部59(保持部)と一体的に結合されている。これにより、上記フォーカスナット49がX軸に沿う方向に移動すると、同時に上記移動光学系保持部59(保持部)も同方向に移動する。したがって、上記移動光学系保持部59(保持部)によって一体に保持される移動光学系もまた同方向に移動する。この場合において、フォーカス駆動モータ46の回転方向を制御することにより、フォーカスナット49のナット部の回転方向を制御して、これにより移動光学系のX軸に沿う方向における進退方向を制御することができる。
このような構成により、上記駆動手段である駆動機構によって、移動光学系をX軸方向、即ち光軸Oに沿う方向に適宜進退移動させることで焦点位置を調整すると共に、移動光学系を光軸Oに沿う方(X軸方向)に移動させる際には、当該移動光学系の画角が一定となるように構成されている。そのために、プリズム41及び移動光学系からなる本実施形態の試料観察装置1における撮像光学系は、全体としてテレセントリック光学系が採用されている。
付勢ばね51は、第2テーブル29Y(固定部)に対してフォーカスナット49を一方向に付勢する付勢部材である。この付勢ばね51は、一端がフォーカスナット49に、他端が第2テーブル29Yの固定部に、それぞれ固定されている。そのために、フォーカスナット49には、付勢ばね51の一端を固定するばね係止軸50が設けられている。また、第2テーブル29Y上の固定部には、付勢ばね51の他端を固定する支軸52が植設されている。本実施形態における付勢ばね51としては、例えば緊縮性のコイルばね等を適用した例を示している。
光源部44は、第2テーブル29Y上において、上記プリズム41の周辺に配置されている。本実施形態において、光源部44は、上記プリズム41の周辺に三つ配置した例を示している。光源部44は、蓋体12上の所定の部位(光透過部12a)に載置した培養器13内の試料の下方から上方に向けて照明光を射出する光源部材である。光源部44としては、例えばLED(light emitting diode;発光ダイオード)等の発光体等が適用される。
なお、光源部44の上方、即ち光源部44と上記蓋体12の光透過部12aとの間には、光拡散板53が配設されている。この光拡散板53は、例えば光透過性を有すると共に光拡散性を有する乳白色の樹脂製薄板によって形成されている。この光拡散板53は、光源部44から出射された照明光を拡散させて、上記光透過部12aを介して培養器13内を照明する役目をするものである。
光源部44から出射された照明光は、図15の矢印符号Lで示すように、上記光透過部12a及び培養器13の透明な底面を透過して培養器13内に入射する。培養器13内に入射した照明光は、当該培養器13内の反射面13aによって反射した後、培養器13内の培地200内に存在する試料を透過して、上記光透過部12aを介してプリズム41へと入射するように構成されている。
電気基板62は、例えば光源部44の配置されている近傍において、第2テーブル29Yの下面側、即ち光源部44が設けられている側とは反対側の面に固定配置されている。この電気基板62には、複数の電気部材62a等を用いて形成され、上記光源部44の駆動回路、上記移動光学系の駆動機構の駆動回路、上記撮像部43の駆動回路及び撮像素子43aから出力される画像データの画像信号処理回路等が実装されている。
また、電気基板62には、上記以外にも、例えば外部機器との通信を行うための通信回路や、取得した画像データ及び付随する各種情報データ等を記録する記録媒体を含むデータ記録回路等のほか、フォーカス駆動モータ46を駆動するためのバッテリを含む電源回路等を含めて構成してもよい。
上記電気基板62からは、接続線63やリード線64(図11参照)等が延出しており、これらリード線、フレキシブルプリント基板等の端部は、上記光源部44、上記駆動機構(のフォーカス駆動モータ46)、上記撮像部43の撮像基板43b等に接続されている。さらに、上記電気基板62からは、別の接続ケーブル若しくはフレキシブルプリント基板等の接続線61が延出している。この別の接続線61は、箱体10内における固定部に固設された上記電気基板54、55(図15参照)に接続されている。この場合において、接続線61は、X−Y平面内で移動する移動部材である被駆動ユニット60上から延出しているものである。そのために、当該接続線61は、X−Y平面内での移動を吸収し得るように余裕を持たせて、その長さ寸法が設定されている。
なお、光源部44とプリズム41(光学要素)と上記移動光学系保持部59(保持部)との間には、所定の間隔を有するように、それぞれが配置されている。ここで、所定の間隔としては、図13の符号Dで示す間隔を規定している。この間隔Dは、移動光学系がフォーカス調整のために移動するのに必要な移動範囲である。
なお、上述したように、第2テーブル29Y上には、光源部44と、プリズム41(光学要素)と、フォーカス駆動モータ46等からなる駆動機構とが固定配置されている。またこれと共に、第2テーブル29Y上には、フォーカスレール51が配置され、このフォーカスレール51は、上記移動光学系保持部59のフォーカスレール保持部59aによって摺動可能に保持されている。したがって、このような構成により、第2テーブル29Yは、移動光学系保持部59(によって保持される移動光学系)をX軸方向に移動可能に支持する支持部材として機能している。
以上説明したように上記一実施形態によれば、焦点調節が可能な光学系(42、45)と撮像素子43aとを有する撮像ユニット40を互いに直交するX軸及びY軸の二方向にそれぞれ直線的に移動させ、当該撮像ユニット40をX−Y平面に平行な面内で自在に移動させ得る駆動機構を具備し、光透過部12aを有する載置部12に培養器13を配置して当該培養器13内の試料を観察する試料観察装置1において、試料を透過してきた光を反射するプリズム41(光学要素)と、撮像素子43aを含みプリズム41(光学要素)からの光を撮像素子43aの撮像面に結像させるように光軸Oに沿う方向に移動する移動光学系(42、45)と、移動光学系(42、45)の光軸Oに沿って当該移動光学系(42、45)全体を移動させる駆動手段(46〜52、59)とを具備して構成している。
そして、プリズム41(光学要素)及び移動光学系(42、45)からなる撮像光学系は、全体としてテレセントリック光学系を形成して構成される。
上記テレセントリック光学系については、一定倍率の状態で移動光学系(42、45)全体を移動させることで焦点調節を行うと説明してきたが、テレセントリック状態を維持していれば、焦点調節を行う前にズーム倍率を変えられるようにしても良い。この場合、移動光学系(42、45)内のレンズを移動させること、即ち、移動光学系(42、45)の全長を変えないでズーム倍率を変えられるようにしても良いし、移動光学系(42、45)の全長長くなるが、移動光学系(42、45)の端部にそれぞれレンズを配置してそれらを移動させることによりズーム倍率を変えられるようにしても良い。
また、上記駆動手段によって上記移動光学系を移動させることで、焦点位置を調整すると共に、上記移動光学系を光軸Oに沿う方向に移動させる際には、画角が一定となるように構成している。
この構成により、本実施形態の試料観察装置1においては、観察対象物である細胞等の試料に対し確実に焦点調節を行なうことができる。これと同時に、本試料観察装置1では、歪みのない良好で高画質な観察画像を得ることができる。
なお、上述の一実施形態においては、一方の駆動モータ(第1の駆動モータ21X)の駆動力伝達機構をベルト駆動方式とし、他方の駆動モータ(第2の駆動モータ21Y)の駆動力伝達機構を送りねじ駆動方式とした構成例を示しているが、この形態に限られることはない。
例えば、2つの駆動モータの駆動力伝達機構を共に送りねじ駆動方式によって構成することもできる。その場合には、例えば一方の回転軸の駆動出力については傘歯車等を用いて駆動力の出力方向を変換する手段を用いる工夫を施せば、上述の一実施形態と同様の作用及び効果を得ることができる。
したがって、2つの駆動モータの回転駆動力を伝達する駆動力伝達機構の駆動方式に関わらず、2つの駆動モータの各回転軸を平行となるように配置することが、主な要旨である。
なお、本発明は上述した実施形態に限定されるものではなく、発明の主旨を逸脱しない範囲内において種々の変形や応用を実施し得ることが可能であることは勿論である。さらに、上記実施形態には、種々の段階の発明が含まれており、開示される複数の構成要件における適宜な組み合わせによって、種々の発明が抽出され得る。例えば、上記一実施形態に示される全構成要件から幾つかの構成要件が削除されても、発明が解決しようとする課題が解決でき、発明の効果が得られる場合には、この構成要件が削除された構成が発明として抽出され得る。さらに、異なる実施形態にわたる構成要素を適宜組み合わせてもよい。この発明は、添付のクレームによって限定される以外にはそれの特定の実施態様によって制約されない。
1……試料観察装置
10……箱体
11……筐体
11a……第1の側壁
11b……第2の側壁
12……蓋体
12a……光透過部
13……培養器
13a……反射面
14……操作部材
15……状態表示部
16、17……接続コネクタ
18……シール部材
21X……第1の駆動モータ
21Xa……第1の回転軸
21Y……第2の駆動モータ
21Ya……第2の回転軸
22X……第1減速手段
22Y……第2減速手段
22Ya……第2の回転軸
23Y……駆動ベルト
24X……送りナット
24Y、25Y……プーリ
26Y……ベルト保持部
26Ya……固定部位
27Y……第3テーブル
27Ya……第3レール保持部
28Y……第3ガイドレール
29X……第1テーブル
29Xa……第1レール保持部
29Y……第2テーブル
29Ya……第2レール保持部
30X……第1ガイドレール
30Y……第2ガイドレール
31X……第1位置検出センサ
31Y……第2位置検出センサ
32X……第1遮光羽根
32Y……第2遮光羽根
33X……第1位置規制手段
33Y……第2位置規制手段
35……伝達機構
36……第1の駆動力伝達手段
37……第2の駆動力伝達手段
39……連結部材
40……撮像ユニット
41……プリズム
41a……反射面
42……光学レンズ
43……撮像部
43a……撮像素子
43b……撮像基板
44……光源部
45……レンズ保持部材
46……フォーカス駆動モータ
47……フォーカス減速機構
48……フォーカス回転出力軸
49……フォーカスナット
50……ばね係止軸
51……フォーカスレール
52……支軸
53……光拡散板
54、55……電気基板
59……移動光学系保持部
59a……フォーカスレール保持部
60……被駆動ユニット
61、63……接続線
62……電気基板
62a……電気部材
64……リード線
100……試料観察システム
101……恒温器
102……制御装置
103……入力装置
104……表示装置
200……培地
10……箱体
11……筐体
11a……第1の側壁
11b……第2の側壁
12……蓋体
12a……光透過部
13……培養器
13a……反射面
14……操作部材
15……状態表示部
16、17……接続コネクタ
18……シール部材
21X……第1の駆動モータ
21Xa……第1の回転軸
21Y……第2の駆動モータ
21Ya……第2の回転軸
22X……第1減速手段
22Y……第2減速手段
22Ya……第2の回転軸
23Y……駆動ベルト
24X……送りナット
24Y、25Y……プーリ
26Y……ベルト保持部
26Ya……固定部位
27Y……第3テーブル
27Ya……第3レール保持部
28Y……第3ガイドレール
29X……第1テーブル
29Xa……第1レール保持部
29Y……第2テーブル
29Ya……第2レール保持部
30X……第1ガイドレール
30Y……第2ガイドレール
31X……第1位置検出センサ
31Y……第2位置検出センサ
32X……第1遮光羽根
32Y……第2遮光羽根
33X……第1位置規制手段
33Y……第2位置規制手段
35……伝達機構
36……第1の駆動力伝達手段
37……第2の駆動力伝達手段
39……連結部材
40……撮像ユニット
41……プリズム
41a……反射面
42……光学レンズ
43……撮像部
43a……撮像素子
43b……撮像基板
44……光源部
45……レンズ保持部材
46……フォーカス駆動モータ
47……フォーカス減速機構
48……フォーカス回転出力軸
49……フォーカスナット
50……ばね係止軸
51……フォーカスレール
52……支軸
53……光拡散板
54、55……電気基板
59……移動光学系保持部
59a……フォーカスレール保持部
60……被駆動ユニット
61、63……接続線
62……電気基板
62a……電気部材
64……リード線
100……試料観察システム
101……恒温器
102……制御装置
103……入力装置
104……表示装置
200……培地
Claims (5)
- 光透過部を有する載置部に培養器を配置して、当該培養器内の試料を観察する試料観察装置において、
上記試料を透過してきた光を反射する光学要素と、
撮像素子を含み上記光学要素からの光を上記撮像素子の撮像面に結像させるように光軸に沿う方向に移動する移動光学系と、
上記移動光学系の光軸に沿って当該移動光学系全体を移動させる駆動手段と、
を具備し、
上記光学要素及び上記移動光学系は、全体としてテレセントリック光学系を形成し、上記駆動手段によって上記移動光学系を移動させることで焦点位置を調整すると共に、上記移動光学系を光軸に沿う方向に移動させる際には画角が一定となるように構成されていることを特徴とする試料観察装置。 - 上記光学要素の周辺に配置されていて、上記試料の下方から上方に向けて照明光を射出する光源部を有し、
上記試料を透過してきた光は、上記照明光が上記培養器によって反射された光であることを特徴とする請求項1記載の試料観察装置。 - 上記移動光学系を保持する保持部と、
上記光源部及び上記光学要素とを固定すると共に、上記保持部を移動可能に支持する支持部材を、さらに有し、
上記光源部及び上記光学要素と上記保持部との間には所定の間隔を有するように、それぞれが配置されていることを特徴とする請求項2記載の試料観察装置。 - 上記駆動手段は、
上記支持部材に固設される駆動モータと、
上記駆動モータの回転出力によって移動する被駆動部材と、
を有し、
上記保持部と上記被駆動部材とが一体的に結合していることを特徴とする請求項1記載の試料観察装置。 - 上記光学要素は、プリズムであることを特徴とする請求項1記載の試料観察装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016079094A JP2017189122A (ja) | 2016-04-11 | 2016-04-11 | 試料観察装置 |
| US15/465,119 US20170295312A1 (en) | 2016-04-11 | 2017-03-21 | Sample observation apparatus |
| CN201710197107.3A CN107290847A (zh) | 2016-04-11 | 2017-03-29 | 试样观察装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016079094A JP2017189122A (ja) | 2016-04-11 | 2016-04-11 | 試料観察装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017189122A true JP2017189122A (ja) | 2017-10-19 |
Family
ID=59999637
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016079094A Pending JP2017189122A (ja) | 2016-04-11 | 2016-04-11 | 試料観察装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20170295312A1 (ja) |
| JP (1) | JP2017189122A (ja) |
| CN (1) | CN107290847A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101914375B1 (ko) | 2017-05-26 | 2018-11-01 | 전북대학교산학협력단 | Iot를 이용한 비접촉식 휴대용 소형 세포 모니터링 장치 |
| JP2019106944A (ja) * | 2017-12-19 | 2019-07-04 | オリンパス株式会社 | 観察装置及びそれを用いた観察方法 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020052119A (ja) * | 2018-09-25 | 2020-04-02 | 株式会社Screenホールディングス | 画像処理方法および画像処理装置 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3454658B2 (ja) * | 1997-02-03 | 2003-10-06 | 大日本スクリーン製造株式会社 | 研磨処理モニター装置 |
| US7994485B2 (en) * | 2008-04-08 | 2011-08-09 | Carestream Health, Inc. | Apparatus and method for fluorescence measurements using spatially structured illumination |
| JP6040012B2 (ja) * | 2012-11-26 | 2016-12-07 | 株式会社日立ハイテクノロジーズ | 試料台及び荷電粒子線装置及び試料観察方法 |
-
2016
- 2016-04-11 JP JP2016079094A patent/JP2017189122A/ja active Pending
-
2017
- 2017-03-21 US US15/465,119 patent/US20170295312A1/en not_active Abandoned
- 2017-03-29 CN CN201710197107.3A patent/CN107290847A/zh active Pending
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101914375B1 (ko) | 2017-05-26 | 2018-11-01 | 전북대학교산학협력단 | Iot를 이용한 비접촉식 휴대용 소형 세포 모니터링 장치 |
| JP2019106944A (ja) * | 2017-12-19 | 2019-07-04 | オリンパス株式会社 | 観察装置及びそれを用いた観察方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN107290847A (zh) | 2017-10-24 |
| US20170295312A1 (en) | 2017-10-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN107209361B (zh) | 观察装置 | |
| JP5317672B2 (ja) | 観察ユニット | |
| US20110216404A1 (en) | Confocal microscope system | |
| US8956861B2 (en) | Container tray, tray base, and observation unit | |
| JP2017189122A (ja) | 試料観察装置 | |
| CN113640991A (zh) | 抬头显示系统和车辆 | |
| JP6244314B2 (ja) | 計器盤のための改善された裏面搭載型計器モジュール | |
| JP2017189123A (ja) | 試料観察装置 | |
| US20120300273A1 (en) | Floating virtual hologram display apparatus | |
| US20180081180A1 (en) | Observation device, glasses-type terminal device, observation system, observation method, sample position acquisition method, recording medium recording observation program, and recording medium recording sample position acquisition program | |
| JP2017189124A (ja) | 試料観察装置 | |
| JP2014011152A (ja) | 導光体 | |
| JP2017189125A (ja) | 試料観察装置 | |
| JP2025128314A (ja) | ディッシュ、ディッシュを用いた胚培養装置および胚培養部の撮像方法 | |
| JP2018099091A (ja) | ステージ装置 | |
| JPWO2019130695A1 (ja) | 車両用表示装置 | |
| KR20170003928A (ko) | 5축 광학 검사 시스템 | |
| US20050231798A1 (en) | System microscope | |
| CN112384606B (zh) | 观察装置 | |
| JP2018148825A (ja) | 試料観察装置 | |
| JP5513273B2 (ja) | 観察装置 | |
| JP2018148826A (ja) | 試料観察装置 | |
| CN109960026B (zh) | 照明装置、显微镜装置以及盒 | |
| US20170280051A1 (en) | Observation apparatus, measurement system, culture vessel and control method for observation apparatus | |
| JP2018148823A (ja) | 試料観察装置 |