JP2017189125A - 試料観察装置 - Google Patents
試料観察装置 Download PDFInfo
- Publication number
- JP2017189125A JP2017189125A JP2016079097A JP2016079097A JP2017189125A JP 2017189125 A JP2017189125 A JP 2017189125A JP 2016079097 A JP2016079097 A JP 2016079097A JP 2016079097 A JP2016079097 A JP 2016079097A JP 2017189125 A JP2017189125 A JP 2017189125A
- Authority
- JP
- Japan
- Prior art keywords
- imaging
- moving member
- sample observation
- observation apparatus
- control circuit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images














Landscapes
- Apparatus Associated With Microorganisms And Enzymes (AREA)
- Investigating Or Analysing Materials By Optical Means (AREA)
Abstract
【課題】回路長の短距離化を実現しノイズ耐性を向上することのできる試料観察装置を提供する。【解決手段】密閉された箱体10と、箱体内において互いに直交するX軸、Y軸方向に移動する第1の移動部材29X及び第2の移動部材29Yと、いずれも第2の移動部材上に配設された、撮像素子43a、撮像素子駆動基板43b、撮像素子駆動基板43bと電気的に連結されて配設され撮像信号の画像処理をする電気基板62、撮像素子駆動基板43bと電気基板62と接続する接続配線部71、撮像信号を記憶する電気基板62に着脱自在のメモリカード、撮像信号を無線で外部に送信する無線LAN基板72を備え、電気基板62は、撮像光学系の光軸方向下側に配置されている。【選択図】図8
Description
この発明は、培養器内の細胞等の試料を観察する試料観察装置に関するものである。
従来、撮像光学系及び撮像素子等を含む撮像ユニットを、互いに直交するX軸及びY軸の二方向のそれぞれに直線的に移動させ、当該撮像ユニットをX−Y平面に平行な面内で自在に移動させ得る駆動機構等を備え、培養器内の細胞等の試料の全体像を自動的に走査することができると共に、培養器内の細胞等の試料の所望の部位を任意に観察することができるように構成された試料観察装置については、例えば特開平5−232047号公報(特許文献1)、特開2008−92882号公報(特許文献2)等によって、種々の形態のものが提案され、また実用化されている。
上記特開平5−232047号公報、上記特開2008−92882号公報等によって開示されている試料観察装置においては、X−Y平面に平行な面内で自在に移動させ得る駆動機構等によって撮像ユニットが移動される一方で、当該試料観察装置の筐体内に前記撮像ユニットを駆動する制御基板が配置されている。
また、これら撮像ユニットと制御基板とは、フレキシブルな接続ケーブルにより接続され、撮像素子の駆動信号と共に当該撮像信号から出力される撮像信号等が伝送されるようになっている。
ところが、上述した接続ケーブルにおいて伝送される信号は高周波信号であるため、撮像素子と制御基板とが離間し接続ケーブルが長距離引き回される状態においては、外来ノイズの影響が無視できない虞がある。
したがって、外来ノイズの影響を軽減するために従来、例えば、接続ケーブル自体にシールド対策を施す、または、回路にノイズ軽減部品を配置する等の対策を施す必要があった。
具体的に、上述の如き制御基板を、観察装置内において、撮像ユニットを有する移動部材が動く範囲およびその周辺、または、装置筐体の壁およびその周辺に配置すると、制御基板の配置位置または接続ケーブルの配線位置によっては外来ノイズの影響を受けやすくなり、対策が必要であった。
一方、上述の如き制御基板を装置筐体の壁の近くに配置すると小型化の問題も生じる。
本発明は、上述した点に鑑みてなされたものであって、その目的とするところは、撮像ユニットと接続される制御基板の配設位置を工夫し、回路長の短距離化を実現しノイズ耐性を向上すると共に装置の小型を実現する試料観察装置を提供することである。
上記目的を達成するために、本発明の一態様の試料観察装置は、密閉された箱体と、上記箱体内において第1のガイド部に沿って第1の方向に移動する第1の移動部材と、上記第1の方向に延びて配置された撮像光学系と当該撮像光学系を通過してきた被写体光を電気信号に変換する撮像素子とを有し、上記第1の移動部材とともに第1の方向に移動し、移動後に当該第1の移動部材に対して第2のガイド部に沿って上記第1の方向と垂直な第2の方向に移動する第2の移動部材と、上記第2の移動部材に配置され、上記撮像素子を制御する第1の撮像制御回路基板と、上記第2の移動部材に上記第1の撮像制御回路基板と電気的に連結されて配置されていて、上記撮像制御回路からの信号を処理する第2の撮像制御回路基板を具備し、上記第1の撮像制御回路基板は上記撮像素子の周辺に配置され、上記第2の撮像制御回路基板は上記撮像撮像光学系の被写体入光部である第1レンズの光軸方向下側に配置されている。
本発明によれば、撮像ユニットと接続される制御基板の配設位置を工夫し、回路長の短距離化を実現しノイズ耐性を向上すると共に装置の小型を実現する試料観察装置を提供することができる。
以下、図示の実施の形態によって本発明を説明する。以下の説明に用いる各図面は模式的に示すものであり、各構成要素を図面上で認識可能な程度の大きさで示すために、各部材の寸法関係や縮尺等を各構成要素毎に異ならせて示している場合がある。したがって、本発明は、これら各図面に記載された構成要素の数量や構成要素の形状や構成要素の大きさの比率や各構成要素の相対的な位置関係等に関し、図示の形態のみに限定されるものではない。
[一実施形態]
図1は、本発明の一実施形態の試料観察装置を含む試料観察システムの全体構成の概略を示すシステム構成図である。図2は、本実施形態の試料観察装置の外観を示す外観斜視図である。図3は、図2の試料観察装置から培養器(培養フラスコ)を取り外した状態を示す外観斜視図である。
図1は、本発明の一実施形態の試料観察装置を含む試料観察システムの全体構成の概略を示すシステム構成図である。図2は、本実施形態の試料観察装置の外観を示す外観斜視図である。図3は、図2の試料観察装置から培養器(培養フラスコ)を取り外した状態を示す外観斜視図である。
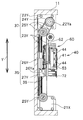
図4〜図9は、図2の試料観察装置の蓋体を取り外して、その内部構成を示す図である。このうち図4は、外観斜視図である。図5は、上面側から見た平面図である。図6は、図5の[6]−[6]線に沿う断面図である。図7は、図5の[7]−[7]線に沿う断面図である。図8は、図5の[8]−[8]線に沿う断面図である。図9は、図5の[9]−[9]線に沿う断面図である。
図10〜図14は、図2の試料観察装置における第2移動部材のみを取り出して示す図である。このうち図10は、主に上面側を示す外観斜視図である。図11は、主に裏面側を示す外観斜視図である。図12は、上面側から見た平面図である。図13は、図12の[13]−[13]線に沿う断面図である。図14は、主に移動光学系の保持構造を示すために、当該部位を拡大して示す要部拡大断面図である。なお、図14は、図5の[14]−[14]線に沿う断面である。
図15は、本実施形態の試料観察装置において培養器を取り付けて使用する際の状態を示す断面図である。なお、図15は、培養器を取り付けた状態の試料観察装置において、図5の[8]−[8]線に沿う断面に相当する。
まず、本発明の一実施形態の試料観察装置の詳細構成を説明する前に、本実施形態の試料観察装置を含む試料観察システムの全体構成の概略を、主に図1を用いて以下に説明する。
本実施形態の試料観察装置1を含む試料観察システム100は、本実施形態の試料観察装置1と、恒温器101と、制御装置102と、入力装置103及び表示装置104等によって主に構成されている。
本実施形態の試料観察装置1は、恒温器101の内部に格納載置された状態で使用される。この恒温器101は、温度を一定に保つ機能を有する装置であり、いわゆるインキュベーター(incubator)と呼ばれるものである。恒温器101としては、様々な形態のものが存在するが、従来一般に実用化され広く利用されているものを適用するものとし、その詳細な構成の説明は省略する。
制御装置102は、本実施形態の試料観察装置1との間で、例えば接続ケーブル等の有線接続手段(USB(Universal Serial Bus;ユニバーサルシリアルバス)接続等)若しくは不図示の無線接続手段等を介して電気的に接続され、当該試料観察装置1の動作を制御したり、当該試料観察装置1によって取得される画像データを受信したり、この受信した画像データを記憶媒体に記憶したり、また受信した画像データについての解析や分析等、各種の画像信号処理等を実行するほか、上記試料観察装置1への給電を行うための装置である。制御装置102としては、例えば広く一般に普及している小型パーソナルコンピュータ等を適用することができる。そのためには、それらに適合した各種の制御プログラムを適宜用意することにより運用が可能である。
なお、試料観察装置1への給電については、制御装置102を介した給電手段に限らず、不図示の電源ケーブルを用いて上記恒温器101の外部に設けられる商用電源から給電を行うようにしてもよいし、恒温器101内若しくは外部に設置した蓄電池等からの給電をおこなうようにしてもよい。
上記制御装置102には、その周辺機器としての入力装置103及び表示装置104等が電気的に接続されている。入力装置103は、使用者(ユーザ)により指示を制御装置102に対して入力するためのデバイスである。入力装置103の形態としては、例えばキーボードのほか、マウスやトラックボール、ジョイスティック等のポインティングデバイス等がある。使用者(ユーザ)は、これらの入力装置103を用いて、制御装置102への制御指示入力や各種の信号処理のための指示入力を行うことができる。
表示装置104は、制御装置102によって動作する制御プログラムに基く各種の表示や、上記試料観察装置1によって取得され、制御装置102によって受信された画像データ等に基く画像等を視覚的に表示するための装置である。表示装置104としては、広く一般に普及している液晶表示モニタ等を適用し得る。
次に、本実施形態の試料観察装置1の詳細な構成を、図2〜図14を用いて以下に説明する。
本実施形態の試料観察装置1は、内部に設けられる撮像ユニット40等を互いに直交するX軸及びY軸の二方向にそれぞれ直線的に移動させ、当該撮像ユニット40等をX−Y平面に平行な面内で自在に移動させ得る駆動機構を具備する試料観察装置である。この試料観察装置1は、光透過部12aを有する載置部に培養器13を配置して、当該培養器13内の試料を観察するように構成されている。
なお、以下の説明において、図2等に示すように、当該試料観察装置1における箱体10(後述)の長辺に沿う方向をX軸というものとし、このX軸に沿う方向を第1の方向というものとする。また、同箱体10の短辺に沿う方向であって、上記X軸に直交する方向をY軸というものとし、このY軸に沿う方向を第2の方向というものとする。
そのために、本実施形態の試料観察装置1は、図2、図3に示すように、密閉された直方体形状の箱体10と、この箱体10の一面に載置される培養器13とによって構成されている。なお、図3は、培養器13を取り外した状態を示しているので、図3においては培養器13は不図示である。
箱体(case)10は、一面に開口を有する筐体(chassis)11と、この筐体11の開口を水密的に覆う蓋体12(lid)とによって構成される。筐体11の内部には、詳細は後述するが、当該試料観察装置1における各種の構成部材が収納配置されている。また、筐体11の一側面(前面側)の外壁面には、複数の接続コネクタ16、17が配設されている。この複数の接続コネクタ16、17としては、例えば当該試料観察装置1に対する電力供給を行うための電源ケーブルや、当該試料観察装置1への制御信号若しくは当該試料観察装置1から出力されるデータ信号を含む各種の信号等の伝達を行うための信号伝達ケーブル(例えばUSBケーブル等)等に対応したコネクタである。
これら複数の接続コネクタ16、17は、筐体11の内部に配設され、それぞれに各対応する電気基板(図4等においては不図示。後述する図15の符号55参照)に接続されている。この電気基板(55;図15)には、例えば電源回路や通信回路等が実装されている。
さらに、上記電気基板55には、後述するフレキシブル配線ケーブル61が接続され、当該フレキシブル配線ケーブル61を介して、後述する電気基板62に対して所定の電源の供給および所定データが伝送されるようになっている。
なお、上記筐体11において、上記複数の接続コネクタ16、17が配設されている一側面の壁面を前壁面というものとする。そして、以下の説明において、上記前壁面に対して直交して設けられ、互いに対向して配設される二つの側壁について、それぞれを第1の側壁11a、第2の側壁11bというものとする(図4参照)。また、筐体11の開口に対向する面を底面というものとする。
蓋体12は、光透過部12aを有して構成され、培養器13を載置するための載置部である。上記光透過部12aは、例えば矩形状の貫通孔である窓部と、この窓部に嵌合配置されガラス素材若しくは樹脂製素材等を用いて形成される光透過性を有する透明薄板部材とによって形成されている。
培養器13は、培地を作り細菌等の微生物、細胞等の試料を培養するための箱型形状からなる容器である。この培養器13は、上記試料観察装置1の使用時には、箱体10の蓋体12の光透過部12a上に載置される。
上記培養器13は、これを上記光透過部12a上に載置したときに、当該光透過部12aに対向する側、即ち培養器13の底面側が平皿状に形成され、かつ当該平皿状底面は透明薄板状に形成されている。上記培養器13の底面以外のその他の面も、表面が平面をなし、光を反射し得るような反射面が形成されている。この反射面は、当該試料観察装置1の箱体10の内部に設けられる照明光源から出射され上記光透過部12aを介して当該培養器13内に入射してくる照明光を受けて、これを反射するものである。これにより、当該培養器13の上記平皿状底面内の細胞等の試料は、上記反射面からの照明光によって照明されるので、当該試料観察装置1においては、培養器13内の細胞等の試料を透過光によって観察することができるように構成されている。
また、蓋体12には、複数の操作部材14と、複数の状態表示部15とが設けられている。上記複数の操作部材14は、例えば当該試料観察装置1を恒温器101内に設置する前に、当該試料観察装置1内の被被駆動ユニット(撮像ユニット40等;詳細後述)の箱体10内部での位置調整等を手動操作により行うための操作スイッチ等である。上記複数の状態表示部15は、例えば上記複数の操作部材14の一つを操作した時に点灯表示される等によって、どの操作部材が操作されたかの状態を表示するために設けられる部材である。そのために、上記複数の状態表示部15のそれぞれは、上記複数の操作部材14に対応して各近傍に設けられている。上記複数の状態表示部15としては、例えばLED(light emitting diode;発光ダイオード)等の発光体等が適用されている。
これら複数の操作部材14と複数の状態表示部15とは、筐体11の内部に配設され、それぞれに各対応する電気基板(図4等においては不図示。後述する図15の符号54参照)に接続されている。この電気基板(54;図15)には、例えば操作部材の操作入力を受けるスイッチ部材やその入力信号を処理する信号処理回路のほか、状態表示用部材(LED)の駆動回路等が実装されている。
箱体10は密閉構造、即ち水密構造を有して構成されている。そのために、筐体11には、図4等に示すように、シール部材18が設けられている。このシール部材18は、筐体11に対してその開口を覆う様に蓋体12を配置したとき、蓋体12の内面が密着する部位において筐体11の開口の周縁部に沿って配置されている。そして、筐体11に対して蓋体12を配置した時、シール部材18が蓋体12の内面に密着することで、蓋体12は、筐体11の開口を水密的に覆う。このような形態により箱体10の水密構造が構成されている。
箱体10(筐体11)の内部には、図4〜図9等に示すように、撮像ユニット40等を含む被駆動ユニット60と、この被駆動ユニット60をX−Y平面に平行な面内で自在に移動させるための駆動機構等が配設されている。
被駆動ユニット60は、詳細は後述するが、撮像光学系(41、42、45等)とその駆動機構(46、47、49、59等)と、撮像素子43aを含む撮像部43、撮像素子駆動基板43b、上記撮像素子駆動基板43bに接続された接続配線部71、光源部44(図7参照)、上記接続配線部71を介して上記撮像素子駆動基板43bと電気的に接続された電気基板62(図8参照)および当該電気基板62に電気的に接続される無線LAN基板72等を含んで構成される撮像ユニット40と、この撮像ユニット40を搭載する移動部材であって後述する第2の移動部材である第2テーブル29Yとを含んで構成される。なお、被駆動ユニット60および撮像ユニット40の詳細構成については、図10〜図13等を用いて後述する。
箱体10(筐体11)の内部において、上記被駆動ユニット60をX−Y平面に平行な面内で移動させる駆動機構は、第1ガイドレール30X(第1のガイド部、第1のガイド手段)と、第2ガイドレール30Y(第2のガイド部、第2のガイド手段)と、第1テーブル29X(第1の移動部材)と、第2テーブル29Y(第2の移動部材)と、第1の駆動モータ21Xと、第2の駆動モータ21Yと、伝達機構35と、第1の駆動力伝達手段36と、第2の駆動力伝達手段37と、第1位置検出手段(31X、32X)及び第2位置検出手段(31Y、32Y)と、第1位置規制手段33X及び第2位置規制手段33Y等によって構成されている。
第1ガイドレール30Xは、第1の方向であるX軸方向に沿って延びるように配設され、第1テーブル29XのX軸方向への移動をガイドする第1のガイド部であり第1のガイド手段である。第1ガイドレール30Xは、筐体11の内部において複数設けられている。本実施形態においては、第1ガイドレール30Xを二本設けた例を示している。この場合において、二本の第1ガイドレール30Xのうち一方は側壁11aに隣接する位置において、同側壁11aに沿って所定の範囲に設けられている。また、二本の第1ガイドレール30Xのうち他方は側壁11bに隣接する位置において、同側壁11bに沿って所定の範囲に設けられている。
なお、後述するように、筐体11の内部において、側壁11aに隣接する位置には、同側壁11aに沿うように第1の駆動モータ21Xが設けられている。同様に、筐体11の内部において、側壁11bに隣接する位置には、同側壁11bに沿うように第2の駆動モータ21Yが設けられている。したがって、二本の第1ガイドレール30Xは、上記第1の駆動モータ21X及び第2の駆動モータ21Yが配設されている各側壁11a、11bの隣接位置以外の各側壁11a、11bの隣接位置に設けられている。これにより、第1の駆動モータ21Xと一方の第1ガイドレール30Xとは、それぞれの長軸方向が直線的に、側壁11aに沿うように並べて配設されている。同様に、第2の駆動モータ21Yと他方の第1ガイドレール30Xとは、それぞれの長軸方向が直線的に、側壁11bに沿うように並べて配設されている。
第1テーブル29Xは、第1ガイドレール30Xによってガイドされて、同第1ガイドレール30Xに沿うX軸方向に移動する第1の移動部材である。この第1テーブル29Xは、後述する第1の駆動モータ21Xの回転駆動力により駆動される。そのために、第1テーブル29XのY軸方向における両端部の各下面側には、図9に示すように、第1ガイドレール30Xを摺動可能に保持する第1レール保持部29Xaが設けられている。この第1レール保持部29Xaは、X軸方向に延びるように配設されている。そして、当該第1レール保持部29Xaは、第1ガイドレール30Xの幅方向(軸方向に直交する方向)を抱え込み得る形態の溝形状部を有して形成されている。このような構成により、第1テーブル29Xは、第1ガイドレール30Xにガイドされ、これに沿う方向であるX軸方向にのみ移動するように構成されている。
第2ガイドレール30Yは、X軸方向に垂直な第2の方向(Y軸方向)に沿って延びるように配設され、第2テーブル29YのY軸方向への移動をガイドする第2のガイド部であり第2のガイド手段である。第2ガイドレール30Yは、筐体11の内部において、上記第1テーブル29X上に載置される形態で複数設けられている。本実施形態においては、第2ガイドレール30Yを二本設けた例を示している。この場合において、二本の第2ガイドレール30Yは、上記第1テーブル29X上において、X軸方向に所定の間隔を置いて並べて配置されている。
第2テーブル29Yは、第2ガイドレール30Yによってガイドされて、同第2ガイドレール30Yに沿ってY軸方向に移動する第2の移動部材である。また、第2テーブル29Yは、第1テーブル29Xと共にX軸方向にも移動するように構成されている。そのために、第2テーブル29Yの下面側には、図8に示すように、二本の第2ガイドレール30Yをそれぞれ摺動可能に保持する第2レール保持部29Yaが設けられている。この第2レール保持部29Yaは、Y軸方向に延びるように配設されている。そして、当該第2レール保持部29Yaは、第2ガイドレール30Yの幅方向(軸方向に直交する方向)を抱え込み得る形態の溝形状部を有して形成されている。このような構成により、第2テーブル29Yは、第2ガイドレール30Yによってガイドされて、同第2ガイドレール30Yに沿ってY軸方向に移動すると共に、第1テーブル29Xが第1ガイドレール30Xによってガイドされて、同第1ガイドレール30Xに沿ってX軸方向に移動する際には、当該第1テーブル29Xと共に同方向(X軸方向)に移動する。
そして、上述したように、上記第2テーブル29Yには、撮像部43を含む撮像ユニット40等が搭載されている。これにより、上記第2テーブル29Yは、被駆動ユニット60の一部として機能する。
第1の駆動モータ21Xは、第1テーブル29XをX軸方向に移動させ駆動するための回転力を出力する第1の回転軸21Xa(図5参照)を有する駆動モータである。第1の駆動モータ21Xは、上述したように、箱体10(筐体11)の第1の側壁11aに隣接して設けられている。この場合において、第1の回転軸21Xaは、第1ガイドレール30Xと平行に配置されている。上記第1の駆動モータ21Xの上記第1の回転軸21Xaから出力される回転駆動力は、第1の駆動力伝達手段36を介して第1テーブル29Xへと伝達されて、当該第1テーブル29XをX軸方向へと移動させるように構成されている。
第1の駆動力伝達手段36は、第1の駆動モータ21Xからの回転出力を第1テーブル29X(第1の移動部材)に伝達する駆動力伝達機構である。第1の駆動力伝達手段36は、第1減速手段22Xと、送りねじ23Xと、送りナット24Xとによって構成されている。
第1減速手段22Xは、第1の駆動モータ21Xの第1の回転軸21Xaからの回転出力を受けて減速するギアー列等を内部に有する構成ユニットである。第1減速手段22Xの構成自体は、従来一般に周知の動力減速手段と同様のものが適用されているものとして、その詳細説明は省略する。
送りねじ23Xは、上記第1減速手段22Xからの回転出力を受けて回転する棒状部材である。この送りねじ23Xの基端は上記第1減速手段22Xに連結されている。また、当該送りねじ23Xの他端は、筐体11の内壁面の固定部に対し回転を許容しながら回動自在に軸支されている。
送りナット24Xは、上記送りねじ23Xに螺合するナット部を内部に備え、上記第1テーブル29Xに固定される構成部である。この構成により、第1の駆動モータ21Xの回転出力を受けて上記送りねじ23Xが回転すると、当該送りねじ23Xに螺合するナット部の作用により、送りナット24XはX軸に沿う方向に移動する。これと同時に第1テーブル29Xも同方向に移動する。この場合において、第1の駆動モータ21Xの回転方向を制御することにより、送りナット24Xの回転方向を制御して、これにより第1テーブル29XのX軸に沿う方向における進退方向を制御することができる。
つまり、第1テーブル29Xは、第1の駆動モータ21X及び送りねじ23X、送りナット24X等を用いた送りねじ駆動方式により、第1の駆動モータ21Xの第1の回転軸21Xaに平行な方向(X軸方向)に移動する。
第2の駆動モータ21Yは、第2テーブル29YをY軸方向に移動させ駆動するための回転力を出力する第2の回転軸22Ya(図7参照)を有する駆動モータである。第2の駆動モータ21Yは、箱体10(筐体11)の第1の側壁11aと対向する第2の側壁11bに隣接して設けられている。この場合において、第2の回転軸22Yaが第1ガイドレール30X及び第1の回転軸21Xaと平行となるように配置されている。
上記第2の駆動モータ21Yの上記第2の回転軸21Yaから出力される回転駆動力は、第2の駆動力伝達手段37及び伝達機構35を介して撮像部43を含む撮像ユニット40等を搭載する第2テーブル29Yへと伝達されて、これ(第2テーブル29Y)をY軸方向へと移動させるように構成されている。
換言すると、第2テーブル29Yは、第2の駆動モータ21Yからの回転力を伝達する第2の駆動力伝達手段37に含まれる伝達機構35を介してY軸方向に移動する。
第2の駆動力伝達手段37は、第2の駆動モータ21Yからの回転出力を撮像部43が搭載される第2テーブル29Y(第2の移動部材)に伝達する駆動力伝達機構である。第2の駆動力伝達手段37は、第2減速手段22Yと、駆動ベルト23Yと、複数のプーリ24Y、25Yと、伝達機構35を含んで構成されている。
第2減速手段22Yは、第2の駆動モータ21Yの第2の回転軸21Yaからの回転出力を受けて減速するギアー列等を内部に有する構成ユニットであり、上記第1減速手段22Xと略同様の構成ユニットである。したがって、第2減速手段22Yにおいても、その構成自体は、従来一般に周知の動力減速手段と同様のものが適用されているものとして、その詳細説明は省略する。
駆動ベルト23Y及び複数のプーリ24Y、25Yは、上記第2減速手段22Yからの回転出力を受けて、これをY軸方向の移動出力に変換する構成部材である。複数のプーリ24Y、25Yのうちプーリ24Yは第2減速手段22Yからの回転出力を出力する軸部材に同軸上に固設されている。各プーリ24Y、25Yには、駆動ベルト23Yが張架されていて、第2の駆動モータ21Yの回転出力を受けて移動する駆動ベルト23Yの移動をガイドすると共に、駆動ベルト23Yの位置決め等を行っている。駆動モータの回転出力を駆動ベルトによって変換する機構は、従来周知であるので、これ以上の詳細説明は省略する。
そして、駆動ベルト23Yの所定の部位には、上記伝達機構35の一部が固定配置されている。この構成により、第2の駆動モータ21Yの回転出力を受けて駆動ベルト23YがY軸に沿う方向に移動すると、上記伝達機構35も同方向に移動するように構成されている。この場合において、第2の駆動モータ21Yの回転方向を制御することにより、駆動ベルト23Yの送り方向及び伝達機構35のY軸に沿う方向における進退方向を制御することができる。
つまり、伝達機構35は、第2の駆動モータ21Y及び駆動ベルト23Y等を用いたベルト駆動方式により、第2の駆動モータ21Yの第2の回転軸21Yaに直交する方向(Y軸方向)に移動する。
上記伝達機構35は、第3ガイドレール28Y(第3のガイド部、第3のガイド手段)と、ベルト保持部26Y及び第3テーブル27Yからなる第3の移動部材と、連結部材39とによって構成される。
第3ガイドレール28Yは、第2ガイドレール30Yと平行に配置され、第3の移動部材(26Y、27Y)のY軸方向への移動をガイドする第3のガイド部であり第3のガイド手段である。
上記第3の移動部材は、第2の駆動モータ21Yからの回転力を受けて、上記第3ガイドレール28Yに沿ってY軸方向に移動する移動部材である。上記第3の移動部材は、ベルト保持部26Y及び第3テーブル27Yとからなる。ベルト保持部26Yは、上記駆動ベルト23Yの所定の部位(図4において符号26Yaで示す固定部位)に固定される構成部材である。第3テーブル27Yは、第3ガイドレール28Yによってガイドされて、同第3ガイドレール28Yに沿うY軸方向に移動する移動部材である。そのために、上記第3テーブル27Yの下面側には、図8に示すように、第3ガイドレール28Yを摺動可能に保持する第3レール保持部27Yaが設けられている。この第3レール保持部27Yaは、Y軸方向に延びるように配設されている。そして、当該第3レール保持部27Yaは、第3ガイドレール28Yの幅方向(軸方向に直交する方向)を抱え込み得る形態の溝形状部を有して形成されている。このような構成により、第3テーブル27Yは、第3ガイドレール28Yによってガイドされて、同第3ガイドレール28Yに沿ってY軸方向に移動する。
上記第3テーブル27Yには、上記ベルト保持部26Yが固定されている。上述したように、ベルト保持部26Yは、駆動ベルト23Yの固定部位26Yaにおいて固定されている。したがって、この構成により、駆動ベルト23Yが第2の駆動モータ21Yの回転出力を受けてY軸に沿う方向に移動すると、上記第3テーブル27Yもまた同方向に移動するように構成されている。
連結部材39は、上記第3の移動部材の第3テーブル27Yと、上記撮像部43を含む撮像ユニット40等を搭載する第2テーブル29Yと、を連結する部材である。連結部材39の一端は第3テーブル27Yに固定され、同連結部材39の他端には、第2テーブル29YがX軸方向へ移動可能に保持されている(図6等参照)。
このように、上記第3の移動部材(の第3テーブル27Y)と上記第2テーブル29Yとが連結部材39によって連結されているので、第2の駆動モータ21Yからの出力に基づいて第3の移動部材(26Y、27Y)が第3ガイドレール28Yに沿って移動する際、上記第2テーブル29Yは、上記第3の移動部材(26Y、27Y)の第3ガイドレール28Yに沿うY軸方向の移動に連動して、第2ガイドレール30Yに沿ってY軸方向に移動する。
第1位置検出手段は、第1テーブル29XのX軸方向における移動範囲の両端位置を検出し、当該第1テーブル29XのX軸方向における移動範囲を制御するために設けられる構成部である。この第1位置検出手段は、一対の第1位置検出センサ31Xと、第1遮光羽根32Xとによって構成されている。一対の第1位置検出センサ31Xは、第2の側壁11bの内壁面にX軸方向に所定の間隔をおいて配置されている。本実施形態においては、上記一対の第1位置検出センサ31Xとして、例えばいわゆる透過型フォトインタラプタ等の検出素子を適用した例を示している。第1遮光羽根32Xは、第1テーブル29X上に配設されている。この場合において、上記第1遮光羽根32Xは、第1テーブル29XがX軸方向に移動したときに上記一対の第1位置検出センサ31Xのそれぞれに対応する位置に配設されている(図4等参照)。
第1位置規制手段33Xは、第1テーブル29XのX軸方向の移動を所定の範囲内となるように規制するために設けられる部材である。第1位置規制手段33Xは、第1テーブル29XがX軸方向に移動したときに当接する位置に設けられる。つまり、第1テーブル29XがX軸方向において一方向の移動時に当接する位置と、他方向の移動時に当接する位置との二箇所に設けられる。これにより、第1テーブル29XのX軸方向の移動範囲が規制される。本実施形態においては、第1位置規制手段33Xの具体的な形態として、例えば筐体11の底面から当該筐体11の内方(即ち上方)に向けて突設される突起状部材を設けた例を示している(図4等参照)。
第2位置検出手段は、第3テーブル27YのY軸方向における移動範囲の両端位置を検出し、当該第3テーブル27YのY軸方向における移動範囲を制御するために設けられる構成部である。この第2位置検出手段は、一対の第2位置検出センサ31Yと、第2遮光羽根32Yとによって構成されている。一対の第2位置検出センサ31Yは、筐体11の底面において、第3ガイドレール28Yの近傍位置に当該第3ガイドレール28Yに沿うY軸方向に所定の間隔をおいて配置されている。本実施形態においては、上記一対の第2位置検出センサ31Yとして、例えばいわゆる透過型フォトインタラプタ等の検出素子を適用した例を示している。第2遮光羽根32Yは、第3テーブル27Y上に配設されている。この場合において、上記第2遮光羽根32Yは、第3テーブル27YがY軸方向に移動したときに上記一対の第2位置検出センサ31Yのそれぞれに対応する位置に配設されている(図4等参照)。
第2位置規制手段33Yは、第3テーブル27YのY軸方向の移動を所定の範囲内となるように規制するために設けられる部材である。第2位置規制手段33Yは、第3テーブル27YがY軸方向に移動したときに当接する位置に設けられる。つまり、第3テーブル27YがY軸方向において一方向の移動時に当接する位置と、他方向の移動時に当接する位置との二箇所に設けられる。これにより、第3テーブル27YのY軸方向の移動範囲が規制される。本実施形態においては、第2位置規制手段33Yの具体的な形態として、例えば筐体11の底面から当該筐体11の内方(即ち上方)に向けて突設される突起状部材を設けた例を示している(図4等参照)。
次に、上記被駆動ユニット60の詳細構成について、図10〜図15等を用いて以下に説明する。
被駆動ユニット60は、上述したように、撮像ユニット40と、この撮像ユニット40を搭載する第2の移動部材である第2テーブル29Yとを含んで構成される。
撮像ユニット40は、プリズム41(光学要素)と、撮像部43を含む移動光学系(42、45)と、その駆動機構である駆動手段(46〜52、59)と、光源部44と、撮像素子43aの駆動制御系(撮像素子駆動基板43b)と、撮像素子43aから出力される撮像信号の画像処理系(電気基板62、接続配線部71)と、外部機器との信号送受信を行う無線送受信系(無線LAN基板72、信号配線部73)等を有して構成されている。
上記プリズム41は、培養器13内の試料を透過してきた光を反射する反射面41aを有する光学要素である。つまり、本実施形態におけるプリズム41は、箱体10の蓋体12上の所定の部位(光透過部12a)に載置した培養器13内の試料を透過してきた光を受けて、その光路を角度90度折り曲げて、所定の方向、即ち撮像素子43aの受光面(不図示)に向けて反射させる機能を有する。このプリズム41は、光を反射するのみの機能を有し、光の屈折を伴わない部材、即ちレンズ効果を有していない部材が適用される。このプリズム41は、第2テーブル29Y上に固設されている。
本実施形態においては、上記反射面を有する光学要素の形態として、プリズムを使用する例を挙げているが、この形態以外にも、例えば反射ミラーを適用した構成例を考えることも可能である。
移動光学系(42、45、43)は、プリズム41(光学要素)からの光を撮像素子43aの受光面へと結像させるように光軸Oに沿う方向に移動可能に構成された構成ユニットである。なお、本実施形態において、移動光学系の光軸Oは、X軸に沿う方向となるように配置されている。したがって、移動光学系は、X軸方向に進退移動し得るように構成されている。
上記移動光学系は、複数の光学レンズ42と、これら複数の光学レンズ42を保持する複数のレンズ保持部材45とを一体に構成した光学部と、撮像素子43a等を含む撮像部43と、を一体に構成した構成ユニットである。
なお、上記プリズム41と、上記複数の光学レンズ42及び複数のレンズ保持部材45とによって構成される構成部を撮像光学系というものとする。そして、上記プリズム41(光学要素)及び移動光学系によって構成される上記撮像光学系は、全体としてテレセントリック光学系を形成している。
上記移動光学系(42、45、43)は、上記第2テーブル29Y上において、X軸方向に移動可能に配設されている。そのために、上記第2テーブル29Y上には、上記移動光学系のX軸方向への移動をガイドするガイド手段であるフォーカスレール51が複数(本実施形態では二本)設けられている。このフォーカスレール51は、上記第2テーブル29Y上においてX軸方向に沿って延びるように配設されている。
これに対応させて、上記移動光学系は、上記フォーカスレール51を摺動可能に保持するフォーカスレール保持部59aを有する移動光学系保持部59によって保持されている(図9、図14参照)。
この移動光学系保持部59は、当該移動光学系の駆動機構(詳細後述)の一部を構成する構成部材である。この移動光学系保持部59の下面側には、上記フォーカスレール保持部59aが固定配置されている。そして、上記フォーカスレール保持部59aは、フォーカスレール51の幅方向(軸方向に直交する方向)を抱え込み得る形態の溝形状部を有して形成されている。上記フォーカスレール保持部59aは、上記二本のフォーカスレール51に対応させて二個設けられている。このような構成により、上記移動光学系は、上記フォーカスレール51によってガイドされて、同フォーカスレール51に沿うX軸方向にのみ移動する。その場合において、上記移動光学系は、後述するフォーカス駆動モータ46の回転駆動力により駆動される。
上記移動光学系の駆動機構は、移動光学系(42、45)全体を、当該移動光学系の光軸Oに沿って移動させるための駆動手段である。
上記移動光学系の駆動機構は、フォーカス駆動モータ46と、フォーカス減速機構47と、フォーカス回転出力軸48と、フォーカスナット49と、付勢ばね51と、移動光学系保持部59等によって構成される。
フォーカス駆動モータ46は、上記移動光学系をX軸方向に進退移動させるための駆動源である。このフォーカス駆動モータ46は、支持部材である第2テーブル29Y上に固設されている。その場合において、当該フォーカス駆動モータ46の回転軸(不図示)は、X軸に沿う方向に配置されている。
フォーカス減速機構47は、フォーカス駆動モータ46の回転軸からの回転出力を受けて減速するギアー列等を内部に有する構成ユニットである。フォーカス減速機構47の構成自体は、従来一般に周知の動力減速手段と同様のものが適用されているものとして、その詳細説明は省略する。なお、このフォーカス減速機構47も、支持部材である第2テーブル29Y上に固設されている。
フォーカス回転出力軸48は、上記フォーカス減速機構47からの回転力を出力する回転軸であって、例えば送りねじ形状に形成されている。このフォーカス回転出力軸48は、上記フォーカス減速機構47と後述のフォーカスナット49との間を連結し、フォーカス駆動モータ46の回転駆動力をフォーカスナット49へと伝達する役目をする。
フォーカスナット49は、上記フォーカス駆動モータ46の回転出力によって、X軸方向に進退移動する被駆動部材である。このフォーカスナット49は、上記送りねじ形状のフォーカス回転出力軸48に螺合するナット部を内部に備え、上記第2テーブル29Y上に固設されている構成部である。このフォーカスナット49は、支持部材である第2テーブル29Yに対してX軸方向に移動可能に設けられている。
この構成により、フォーカス駆動モータ46の回転出力を受けて、上記フォーカス回転出力軸48(送りねじ)が回転すると、当該フォーカス回転出力軸48に螺合するナット部の作用により、上記フォーカスナット49は、X軸に沿う方向に移動する。ここで、フォーカスナット49(被駆動部材)は、上記移動光学系保持部59(保持部)と一体的に結合されている。これにより、上記フォーカスナット49がX軸に沿う方向に移動すると、同時に上記移動光学系保持部59(保持部)も同方向に移動する。したがって、上記移動光学系保持部59(保持部)によって一体に保持される移動光学系もまた同方向に移動する。この場合において、フォーカス駆動モータ46の回転方向を制御することにより、フォーカスナット49のナット部の回転方向を制御して、これにより移動光学系のX軸に沿う方向における進退方向を制御することができる。
このような構成により、上記駆動手段である駆動機構によって、移動光学系をX軸方向、即ち光軸Oに沿う方向に適宜進退移動させることで焦点位置を調整すると共に、移動光学系を光軸Oに沿う方(X軸方向)に移動させる際には、当該移動光学系の画角が一定となるように構成されている。そのために、プリズム41及び移動光学系からなる本実施形態の試料観察装置1における撮像光学系は、全体としてテレセントリック光学系が採用されている。
付勢ばね51は、第2テーブル29Y(固定部)に対してフォーカスナット49を一方向に付勢する付勢部材である。この付勢ばね51は、一端がフォーカスナット49に、他端が第2テーブル29Yの固定部に、それぞれ固定されている。そのために、フォーカスナット49には、付勢ばね51の一端を固定するばね係止軸50が設けられている。また、第2テーブル29Y上の固定部には、付勢ばね51の他端を固定する支軸52が植設されている。本実施形態における付勢ばね51としては、例えば緊縮性のコイルばね等を適用した例を示している。
光源部44は、第2テーブル29Y上において、上記プリズム41の周辺に配置されている。本実施形態において、光源部44は、上記プリズム41の周辺に三つ配置した例を示している。光源部44は、蓋体12上の所定の部位(光透過部12a)に載置した培養器13内の試料の下方から上方に向けて照明光を射出する光源部材である。光源部44としては、例えばLED(light emitting diode;発光ダイオード)等の発光体等が適用される。
なお、光源部44の上方、即ち光源部44と上記蓋体12の光透過部12aとの間には、光拡散板53が配設されている。この光拡散板53は、例えば光透過性を有すると共に光拡散性を有する乳白色の樹脂製薄板によって形成されている。この光拡散板53は、光源部44から出射された照明光を拡散させて、上記光透過部12aを介して培養器13内を照明する役目をするものである。
光源部44から出射された照明光は、図15の矢印符号Lで示すように、上記光透過部12a及び培養器13の透明な底面を透過して培養器13内に入射する。培養器13内に入射した照明光は、当該培養器13内の反射面13aによって反射した後、培養器13内の培地200内に存在する試料を透過して、上記光透過部12aを介してプリズム41へと入射するように構成されている。
上記撮像素子43aは、本実施形態においてはCMOSイメージセンサを採用する。また、撮像素子43aの近傍には、当該撮像素子43aの駆動制御を行う撮像素子駆動基板43b(第1の撮像制御回路基板)が配設されている。
撮像素子駆動基板43bは、所定のクロックおよび同期信号等を入力し撮像素子43aを駆動するための各種タイミング信号を生成するタイミングジェネレータ(TG)等の駆動部を有する。
また、当該撮像素子駆動基板43bには、撮像素子43aの受光部(PD)からの出力信号に対してノイズ軽減を行う相関2重サンプリング回路(CDS)、AD変換部等を含むアナログフロントエンド回路(AFE)が設けられてもよい。
さらに、撮像素子駆動基板43bは、撮像素子43aを含む撮像部43と一体的に形成されるものであってもよい。
なお、本実施形態においては、撮像素子としてCMOSイメージセンサを採用したが、これら限らず、例えば、CCDイメージセンサ等の他の固体撮像素子を採用するものであってもよい。
上記撮像素子駆動基板43bには接続配線部71が接続され、また、撮像素子駆動基板43bは当該接続配線部71を介して電気基板62に電気的に接続されている。すなわち、接続配線部71を介して上述したクロック信号、同期信号および撮像信号が伝送されるようになっている。
なお、当該接続配線部71は、上述したように、撮像ユニット40を構成し、撮像素子駆動基板43b(第1の撮像制御回路基板)と電気基板62(第2の撮像制御回路基板)とを最短経路で接続する配線部である。
また、接続配線部71は当該第2テーブル29Yの移動と一体的に移動するように配設され、上述した撮像素子駆動基板43bと電気基板62とを電気的に接続するようになっている。
接続配線部71は、上述した如き配設されることから、伝送されるクロック信号、同期信号および撮像信号についても、また最短経路で配線されることとなる。少なくとも、従来のタイプ、すなわち、第2の移動部材である第2テーブル29Yより外部に撮像信号を伝送するタイプ(例えば、本実施形態におけるフレキシブル配線ケーブル61に撮像信号を伝送するようなタイプ)とは異なり、撮像信号等の高周波信号を長距離に亘って伝送する必要はないことから、外来ノイズ耐性の点からも極めて有利な条件となる。
電気基板62は、上記フレキシブル配線ケーブル61を介して上記電気基板55に接続される一方で、上記接続配線部71を介して撮像素子駆動基板43bに電気的に接続されるようになっている。
電気基板62は、上述したように、撮像ユニット40を構成し、第2の移動部材である第2テーブル29Yに搭載されている。具体的に電気基板62は、例えば光源部44の配置されている近傍において、第2テーブル29Yの下面側、即ち光源部44が設けられている側とは反対側の面に固定配置されている。
この電気基板62には、複数の電気部材62a等が配設され、上記光源部44の駆動回路および上記移動光学系の駆動機構の駆動回路の他、上記撮像素子43aから出力される撮像信号の画像処理回路等が実装されている。
なお、電気基板62は、フレキシブル配線ケーブル61(および電気基板コネクタ16)を介して外部機器から所定の電源供給を受けることを可能とするものである。さらに、当該フレキシブル配線ケーブル61(および電気基板55、コネクタ17)を介して外部機器との間で所定データまたは信号のやり取りを可能とするものである。
しかしながら、本発明は、電気基板62から(換言すれば、第2の移動部材である第2テーブル29Yから)外部に向けてこのフレキシブル配線ケーブル61等の有線を用いることなく、撮像信号を伝送することを特徴とする。係る作用効果については後に詳述する。
なお、フレキシブル配線ケーブル61は、X−Y平面内で移動する移動部材である被駆動ユニット60上から延出しているものである。そのために、当該フレキシブル配線ケーブル61は、X−Y平面内での移動を吸収し得るように余裕を持たせて、その長さ寸法が設定されている。
電気基板62には、撮像素子43aを駆動するためのクロック信号(CLK)、および同期信号(垂直同期信号VD、水平同期信号HD)を生成するクロック、同期信号生成部を備え、接続配線部71を介して上記撮像素子駆動基板43bに向けてこれら信号を供給する。
さらに、電気基板62には、撮像素子駆動基板43bから出力された撮像信号に対して所定の画像処理を行う画像処理回路を備える。なお、当該画像処理回路は、いわゆるFPGA(field-programmable gate array)等により構成されたPLD(Programmable Logic Device)等により実現されてもよい。
また、電気基板62には、図示しないメモリカード等、着脱自在な記憶媒体が装着可能となっており、取得した画像データ及び付随する各種情報データ等を記録可能となっている。
すなわち、撮像素子駆動基板43bから出力された撮像素子43aからの撮像信号は、当該電気基板62において所定の画像処理が施された後、その後メタル線等において第2の移動部材である第2テーブル29Yから後段に向けて有線伝送されることなく、当該メモリカードを取り出すことにより外部に伝送することが可能となっている。
なお、本実施形態においては、上述したクロック信号および同期信号については、電気基板62の内部に生成部を設けるものとしたが、これに限らず、上記フレキシブル配線ケーブル61を介して外部から供給されるものであっても良い。
また、本実施形態においては、電気基板62に係る電源供給は外部機器から供給されるものとしたが、これに限らず、筐体10内部に電源を設けてもよく、また、電気基板62上に電源を設けてもよい。
また、電気基板62には、フォーカス駆動モータ46を駆動するためのバッテリを含む電源回路等を含めて構成してもよい。
さらに電気基板62からは、接続線63、リード線64(図11参照)等が延出しており、これらリード線、フレキシブルプリント基板等の端部は、上記光源部44、上記駆動機構(のフォーカス駆動モータ46)等に接続されている。
本実施形態においては、さらに、外部機器との信号送受信を行うための無線LAN基板72を備える。この無線LAN基板72は、撮像ユニット40を構成し、電気基板62同様に、第2の移動部材である第2テーブル29Yに搭載されている。
無線LAN基板72は、電気基板62における所定回路部と信号配線部73を介して電気的に接続され、取得した画像データを外部機器に対して無線にて送信可能となっている。なお、本実施形態において採用する無線LAN方式は、一般に実用化され広く利用されているものを適用するものでよく、したがって、その詳細な構成の説明は省略する。
このように、無線LAN基板72の機能を用いると、撮像素子駆動基板43bから出力された撮像素子43aからの撮像信号を、メタル線等において第2の移動部材である第2テーブル29Yから後段に向けて有線伝送することなく、無線により外部に直接伝送することが可能となる。
なお、本実施形態においては、無線LAN基板72は電気基板62とは別体であるとしたが、これに限らず、電気基板62に無線LAN基板72の機能と備えた回路を設けても良い。
なお、光源部44とプリズム41(光学要素)と上記移動光学系保持部59(保持部)との間には、所定の間隔を有するように、それぞれが配置されている。ここで、所定の間隔としては、図13の符号Dで示す間隔を規定している。この間隔Dは、移動光学系がフォーカス調整のために移動するのに必要な移動範囲である。
なお、上述したように、第2テーブル29Y上には、光源部44と、プリズム41(光学要素)と、フォーカス駆動モータ46等からなる駆動機構とが固定配置されている。またこれと共に、第2テーブル29Y上には、フォーカスレール51が配置され、このフォーカスレール51は、上記移動光学系保持部59のフォーカスレール保持部59aによって摺動可能に保持されている。したがって、このような構成により、第2テーブル29Yは、移動光学系保持部59(によって保持される移動光学系)をX軸方向に移動可能に支持する支持部材として機能している。
以上説明したように本実施形態においては、電気基板62において撮像素子駆動基板43bからの撮像信号に係る画像処理を行い、この画像処理を経た撮像信号を着脱自在のメモリカードまたは無線LAN基板72の機能を用いることにより、メタル線等の有線伝送を経ることなく第2の移動部材である第2テーブル29Yより外部に送信することができるので、従来のタイプ、すなわち、第2の移動部材である第2テーブル29Yより外部に撮像信号を伝送するタイプ(例えば、本実施形態におけるフレキシブル配線ケーブル61を用いて撮像信号を伝送するようなタイプ)とは異なり、撮像信号等の高周波信号を長距離に亘って伝送する必要がなく、外来ノイズ耐性の点からも極めて有利な条件となる。
また、撮像素子駆動基板43bから電気基板62への経路(すなわち、撮像素子駆動基板43b(第1の撮像制御回路基板)と電気基板62(第2の撮像制御回路基板)とを結ぶ接続配線部71)について考察すると、まず、撮像素子駆動基板43bと電気基板62とを同じ第2の移動部材である第2テーブル29Y上に配設し、かつ、これら撮像素子駆動基板43bと電気基板62とを、同じ第2テーブル29Yと一体的に移動する接続配線部71よって接続することで、撮像素子駆動基板43bと電気基板62とを最短経路で接続することができ、ノイズ耐性の影響を最小限に留めることができる。
これら効果を総合すると、本実施形態は、撮像信号等の高周波信号の伝送経路を従来に比して短くすることができ外来ノイズ耐性を向上させることができるので、これにより高画質化が可能となり、加えて、過度なノイズ対策を要することがなくコスト上も有利となりさらに小型化にも寄与するという効果を奏する。
なお、本発明は上述した実施形態に限定されるものではなく、発明の主旨を逸脱しない範囲内において種々の変形や応用を実施し得ることが可能であることは勿論である。さらに、上記実施形態には、種々の段階の発明が含まれており、開示される複数の構成要件における適宜な組み合わせによって、種々の発明が抽出され得る。例えば、上記一実施形態に示される全構成要件から幾つかの構成要件が削除されても、発明が解決しようとする課題が解決でき、発明の効果が得られる場合には、この構成要件が削除された構成が発明として抽出され得る。さらに、異なる実施形態にわたる構成要素を適宜組み合わせてもよい。この発明は、添付のクレームによって限定される以外にはそれの特定の実施態様によって制約されない。
1……試料観察装置
10……箱体
11……筐体
11a……第1の側壁
11b……第2の側壁
12……蓋体
12a……光透過部
13……培養器
13a……反射面
14……操作部材
15……状態表示部
16、17……接続コネクタ
18……シール部材
21X……第1の駆動モータ
21Xa……第1の回転軸
21Y……第2の駆動モータ
21Ya……第2の回転軸
22X……第1減速手段
22Y……第2減速手段
22Ya……第2の回転軸
23Y……駆動ベルト
24X……送りナット
24Y、25Y……プーリ
26Y……ベルト保持部
26Ya……固定部位
27Y……第3テーブル
27Ya……第3レール保持部
28Y……第3ガイドレール
29X……第1テーブル
29Xa……第1レール保持部
29Y……第2テーブル
29Ya……第2レール保持部
30X……第1ガイドレール
30Y……第2ガイドレール
31X……第1位置検出センサ
31Y……第2位置検出センサ
32X……第1遮光羽根
32Y……第2遮光羽根
33X……第1位置規制手段
33Y……第2位置規制手段
35……伝達機構
36……第1の駆動力伝達手段
37……第2の駆動力伝達手段
39……連結部材
40……撮像ユニット
41……プリズム
41a……反射面
42……光学レンズ
43……撮像部
43a……撮像素子
43b……撮像素子駆動基板
44……光源部
45……レンズ保持部材
46……フォーカス駆動モータ
47……フォーカス減速機構
48……フォーカス回転出力軸
49……フォーカスナット
50……ばね係止軸
51……フォーカスレール
52……支軸
53……光拡散板
54、55……電気基板
59……移動光学系保持部
59a……フォーカスレール保持部
60……被駆動ユニット
61……フレキシブル配線ケーブル、
63……接続線
62……電気基板
62a……電気部材
64……リード線
71……接続配線部
72……無線LAN基板
100……試料観察システム
101……恒温器
102……制御装置
103……入力装置
104……表示装置
200……培地
10……箱体
11……筐体
11a……第1の側壁
11b……第2の側壁
12……蓋体
12a……光透過部
13……培養器
13a……反射面
14……操作部材
15……状態表示部
16、17……接続コネクタ
18……シール部材
21X……第1の駆動モータ
21Xa……第1の回転軸
21Y……第2の駆動モータ
21Ya……第2の回転軸
22X……第1減速手段
22Y……第2減速手段
22Ya……第2の回転軸
23Y……駆動ベルト
24X……送りナット
24Y、25Y……プーリ
26Y……ベルト保持部
26Ya……固定部位
27Y……第3テーブル
27Ya……第3レール保持部
28Y……第3ガイドレール
29X……第1テーブル
29Xa……第1レール保持部
29Y……第2テーブル
29Ya……第2レール保持部
30X……第1ガイドレール
30Y……第2ガイドレール
31X……第1位置検出センサ
31Y……第2位置検出センサ
32X……第1遮光羽根
32Y……第2遮光羽根
33X……第1位置規制手段
33Y……第2位置規制手段
35……伝達機構
36……第1の駆動力伝達手段
37……第2の駆動力伝達手段
39……連結部材
40……撮像ユニット
41……プリズム
41a……反射面
42……光学レンズ
43……撮像部
43a……撮像素子
43b……撮像素子駆動基板
44……光源部
45……レンズ保持部材
46……フォーカス駆動モータ
47……フォーカス減速機構
48……フォーカス回転出力軸
49……フォーカスナット
50……ばね係止軸
51……フォーカスレール
52……支軸
53……光拡散板
54、55……電気基板
59……移動光学系保持部
59a……フォーカスレール保持部
60……被駆動ユニット
61……フレキシブル配線ケーブル、
63……接続線
62……電気基板
62a……電気部材
64……リード線
71……接続配線部
72……無線LAN基板
100……試料観察システム
101……恒温器
102……制御装置
103……入力装置
104……表示装置
200……培地
Claims (5)
- 密閉された箱体と、
上記箱体内において第1のガイド部に沿って第1の方向に移動する第1の移動部材と、
上記第1の移動部材とともに第1の方向に移動し、移動後に当該第1の移動部材に対して第2のガイド部に沿って上記第1の方向と垂直な第2の方向に移動する第2の移動部材と、
上記第2の移動部材上に配設され、上記第1の方向に延びて配置された撮像光学系と、
上記第2の移動部材上に配設され、上記撮像光学系を通過してきた被写体光を電気信号に変換する撮像素子と、
上記第2の移動部材上に配設され、上記撮像素子を駆動制御するための第1の撮像制御回路基板と、
上記第2の移動部材上において、上記第1の撮像制御回路基板と電気的に連結されて配設され、上記第1の撮像制御回路からの信号を処理する第2の撮像制御回路基板と、
を具備し、
上記第1の撮像制御回路基板は上記撮像素子の周辺に配置され、
上記第2の撮像制御回路基板は上記撮像光学系の被写体入光部である第1レンズの光軸方向下側に配置されている
ことを特徴とする試料観察装置。 - 上記第2の撮像制御回路基板に着脱自在に配設され、上記撮像素子から出力される撮像信号を記憶可能とするメモリをさらに備えた
ことを特徴とする請求項1に記載の試料観察装置。 - 上記第2の移動部材の移動と共に移動するように配設され、上記撮像素子から出力される撮像信号を上記箱部の外へ通信する通信部をさらに備えた
ことを特徴とする請求項1に記載の試料観察装置。 - 上記通信部は、上記第2の撮像制御回路基板に設けられたことを特徴とする請求項3に記載の試料観察装置。
- 上記第2の移動部材と一体的に移動するよう配設され、上記第1の撮像制御回路基板と上記第2の撮像制御回路基板とを電気的に接続するための接続配線部をさらに具備することを特徴とする請求項1に記載の試料観察装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016079097A JP2017189125A (ja) | 2016-04-11 | 2016-04-11 | 試料観察装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016079097A JP2017189125A (ja) | 2016-04-11 | 2016-04-11 | 試料観察装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017189125A true JP2017189125A (ja) | 2017-10-19 |
Family
ID=60084308
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016079097A Pending JP2017189125A (ja) | 2016-04-11 | 2016-04-11 | 試料観察装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2017189125A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020000100A (ja) * | 2018-06-28 | 2020-01-09 | オリンパス株式会社 | 培養モニタリングシステム、状態表示方法、及び、プログラム |
-
2016
- 2016-04-11 JP JP2016079097A patent/JP2017189125A/ja active Pending
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020000100A (ja) * | 2018-06-28 | 2020-01-09 | オリンパス株式会社 | 培養モニタリングシステム、状態表示方法、及び、プログラム |
| JP7107523B2 (ja) | 2018-06-28 | 2022-07-27 | 株式会社エビデント | 培養モニタリングシステム、状態表示方法、及び、プログラム |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN107209361B (zh) | 观察装置 | |
| JP3920780B2 (ja) | イメージセンサヘッド、およびこれを備えたイメージスキャナ | |
| CN101470545A (zh) | 鼠标 | |
| CN101573648A (zh) | 透镜驱动装置 | |
| JP2016019209A (ja) | 画像読取装置 | |
| JP2017189122A (ja) | 試料観察装置 | |
| JP2017189125A (ja) | 試料観察装置 | |
| JP5565065B2 (ja) | 画像読み取り装置 | |
| JP2017189123A (ja) | 試料観察装置 | |
| JP2009165731A (ja) | 生体情報取得装置 | |
| JP2017189124A (ja) | 試料観察装置 | |
| US11418673B2 (en) | Illumination device and image reading device | |
| JP2018099091A (ja) | ステージ装置 | |
| JP7262155B1 (ja) | センサデバイス及びセンシングシステム | |
| JP2018148825A (ja) | 試料観察装置 | |
| JP2018148826A (ja) | 試料観察装置 | |
| JP2007049489A (ja) | 撮像装置 | |
| WO2021010097A1 (ja) | 口腔内検査装置、口腔内検査システム | |
| JP2022152184A (ja) | ディッシュ、ディッシュを用いた胚培養装置および胚の撮像方法 | |
| JP2017169479A (ja) | 観察装置、測定システム及び培養容器 | |
| JP2018148823A (ja) | 試料観察装置 | |
| CN213372088U (zh) | 一种直线式扫描仪装置 | |
| JP3196376U (ja) | ポケットスキャナー | |
| CN117750173A (zh) | 照相机模块和摄像装置 | |
| TW200729924A (en) | Imaging system utilizing illumination and optical modules contained within rotating optical platens |