JP2017191059A - 光学式センサ取付用アダプタおよび光学式センサの取付位置の調整方法 - Google Patents
光学式センサ取付用アダプタおよび光学式センサの取付位置の調整方法 Download PDFInfo
- Publication number
- JP2017191059A JP2017191059A JP2016081683A JP2016081683A JP2017191059A JP 2017191059 A JP2017191059 A JP 2017191059A JP 2016081683 A JP2016081683 A JP 2016081683A JP 2016081683 A JP2016081683 A JP 2016081683A JP 2017191059 A JP2017191059 A JP 2017191059A
- Authority
- JP
- Japan
- Prior art keywords
- adapter
- mounting
- optical sensor
- hole
- sensor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images







Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01J—MEASUREMENT OF INTENSITY, VELOCITY, SPECTRAL CONTENT, POLARISATION, PHASE OR PULSE CHARACTERISTICS OF INFRARED, VISIBLE OR ULTRAVIOLET LIGHT; COLORIMETRY; RADIATION PYROMETRY
- G01J5/00—Radiation pyrometry, e.g. infrared or optical thermometry
- G01J5/02—Constructional details
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/26—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light
- G01D5/264—Mechanical constructional elements therefor ; Mechanical adjustment thereof
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01J—MEASUREMENT OF INTENSITY, VELOCITY, SPECTRAL CONTENT, POLARISATION, PHASE OR PULSE CHARACTERISTICS OF INFRARED, VISIBLE OR ULTRAVIOLET LIGHT; COLORIMETRY; RADIATION PYROMETRY
- G01J5/00—Radiation pyrometry, e.g. infrared or optical thermometry
- G01J5/02—Constructional details
- G01J5/08—Optical arrangements
- G01J5/0818—Waveguides
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N1/00—Scanning, transmission or reproduction of documents or the like, e.g. facsimile transmission; Details thereof
- H04N1/024—Details of scanning heads ; Means for illuminating the original
- H04N1/028—Details of scanning heads ; Means for illuminating the original for picture information pick-up
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Spectroscopy & Molecular Physics (AREA)
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Measuring Temperature Or Quantity Of Heat (AREA)
- Transmission And Conversion Of Sensor Element Output (AREA)
- Optical Transform (AREA)
- Lens Barrels (AREA)
Abstract
Description
上記構成によれば、アダプタの取付位置を、光学式センサの投受光面の側から固定穴までの間、または投受光面の反対の側から固定穴までの間で連続的に変化させることができる。したがって光学式センサの温度特性を小さくするための適切な取付位置を決定することができる。
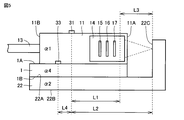
L1は、基準位置から光学系14の主点までの距離である。L2は、基準位置からワーク位置までの距離である。L3は、光学系14の主点からワーク位置までの距離である。正の値は、ワーク位置に近づく方向の長さを表し、負の値は、ワーク位置から遠ざかる方向の長さを表す。
ΔH=L1×α1+ΔL3−L2×α2 ・・・(2)
本発明の実施の形態では、センサヘッド11は、アダプタ1に取り付けられ、アダプタ1が治具22に取り付けられる。L4は、基準位置から、アダプタ1が治具22に取り付けられる位置までの距離である。アダプタ1が治具22に取り付けられる位置とは、ネジ33の位置である。
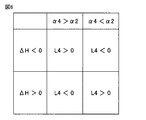
温度特性を相殺するためには、ΔH=−L4×α4となればよい。したがって、以下の式が成立する。
式(4)を変形することにより、以下の式(5)が得られる。
温度特性が負の場合および温度特性が正の場合のそれぞれに応じて、次のようにアダプタ1の取付位置を決定することができる。
ΔH<0の場合、L1×α1+ΔL3<L2×α2となる。
ΔH>0の場合、L1×α1+ΔL3>L2×α2となる。
Claims (6)
- 光学式センサを取付場所に取付けるためのアダプタであって、
前記光学式センサを前記アダプタに設置するためのセンサ設置面と、
前記取付場所に前記アダプタとともに前記光学式センサを取付けるために、前記センサ設置面の反対側に位置する取付面とを有し、
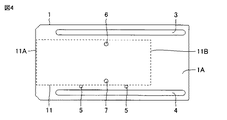
前記センサ設置面には、前記光学式センサを前記センサ設置面に固定するための固定穴が形成されており、
前記アダプタには、前記センサ設置面と前記取付面とを貫通する取付穴が形成されており、
前記取付穴は、前記固定穴に対して前記光学式センサの投受光面の側、および、前記固定穴に対して前記投受光面の反対の側に形成されている、光学式センサ取付用アダプタ。 - 前記取付穴は、前記投受光面の側から前記投受光面の前記反対の側まで連続的に形成された穴である、請求項1に記載の光学式センサ取付用アダプタ。
- 前記取付穴は、前記投受光面の側から前記投受光面の前記反対の側まで直線状に並ぶように形成された複数の穴である、請求項1に記載の光学式センサ取付用アダプタ。
- 前記取付穴は、前記固定穴に対して前記投受光面の側に位置する第1の穴と、前記固定穴に対して前記投受光面の前記反対の側に位置する第2の穴とに分けられている、請求項1に記載の光学式センサ取付用アダプタ。
- 前記第1の穴と前記第2の穴との間に前記固定穴が配置されている、請求項4に記載の光学式センサ取付用アダプタ。
- 請求項1に記載の光学式センサ取付用アダプタを用いて、前記取付場所における前記光学式センサの取付位置を調整するための調整方法であって、
前記光学式センサと前記センサ設置面とをつなぐ第1の固定部材を前記固定穴に挿入することにより、前記光学式センサを前記センサ設置面に固定するステップと、
第2の固定部材を前記取付穴に挿入して、前記アダプタを前記取付場所に固定するステップとを備え、
前記光学式センサの測定値が負の温度特性を有する場合には、
前記取付位置において前記アダプタに接する部材の線膨張係数が前記アダプタの線膨張係数より大きいときに、前記第2の固定部材を前記固定穴よりも前記投受光面側の位置に取り付ける一方、前記部材の線膨張係数が前記アダプタの線膨張係数より小さいときに、前記第2の固定部材を前記固定穴よりも前記投受光面の前記反対の側の位置に取り付け、
前記光学式センサの測定値が正の温度特性を有する場合には、
前記取付位置において前記アダプタに接する部材の線膨張係数が前記アダプタの線膨張係数より大きいときに、前記第2の固定部材を前記固定穴よりも前記投受光面の前記反対の側の位置に取り付ける一方、前記部材の線膨張係数が前記アダプタの線膨張係数より小さいときに、前記第2の固定部材を前記固定穴よりも前記投受光面側の位置に取り付ける、光学式センサの取付位置の調整方法。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016081683A JP6897004B2 (ja) | 2016-04-15 | 2016-04-15 | 光学式センサ取付用アダプタおよび光学式センサの取付位置の調整方法 |
| KR1020170039896A KR101889347B1 (ko) | 2016-04-15 | 2017-03-29 | 광학식 센서 부착용 어댑터 및 광학식 센서의 부착위치 조정방법 |
| CN201710201760.2A CN107300393B (zh) | 2016-04-15 | 2017-03-30 | 光学式传感器安装用适配器及其安装位置的调整方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016081683A JP6897004B2 (ja) | 2016-04-15 | 2016-04-15 | 光学式センサ取付用アダプタおよび光学式センサの取付位置の調整方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017191059A true JP2017191059A (ja) | 2017-10-19 |
| JP6897004B2 JP6897004B2 (ja) | 2021-06-30 |
Family
ID=60084816
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016081683A Active JP6897004B2 (ja) | 2016-04-15 | 2016-04-15 | 光学式センサ取付用アダプタおよび光学式センサの取付位置の調整方法 |
Country Status (3)
| Country | Link |
|---|---|
| JP (1) | JP6897004B2 (ja) |
| KR (1) | KR101889347B1 (ja) |
| CN (1) | CN107300393B (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2025052615A1 (ja) | 2023-09-07 | 2025-03-13 | 株式会社Tmeic | 電力変換装置 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6366445A (ja) * | 1986-09-09 | 1988-03-25 | Ikegami Tsushinki Co Ltd | 外観検査装置 |
| JPH08178701A (ja) * | 1994-12-27 | 1996-07-12 | Canon Inc | 変位センサ |
| JPH08213673A (ja) * | 1995-02-08 | 1996-08-20 | Kubota Corp | 光学装置の支持構造 |
| JPH10261900A (ja) * | 1997-01-17 | 1998-09-29 | Matsushita Electric Ind Co Ltd | 実装部品の検査方法 |
| JPH1172503A (ja) * | 1997-08-29 | 1999-03-16 | Wako Denshi Kk | 圧延方向検出方法及び装置 |
| JP2006048380A (ja) * | 2004-08-04 | 2006-02-16 | Keyence Corp | 光学式変位計のデータ伝送方法及び光学式変位計 |
| JP2014041014A (ja) * | 2012-08-21 | 2014-03-06 | Yasuda Kogyo Kk | 計測システム及びその計測システムを備えた工作機械 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH076486Y2 (ja) * | 1990-02-03 | 1995-02-15 | 株式会社堀場製作所 | 計測器の取り付け台 |
| JP2580324Y2 (ja) * | 1992-09-11 | 1998-09-10 | 株式会社ニコン | レベルセンサ及びその保持装置 |
| JPH10232144A (ja) * | 1997-02-20 | 1998-09-02 | Yazaki Corp | ロータリエンコーダ |
| CN1419146A (zh) * | 2001-11-13 | 2003-05-21 | 力捷电脑股份有限公司 | 透镜外型结构及其透镜微调结构 |
| US7123553B2 (en) * | 2002-05-31 | 2006-10-17 | Matsushita Electric Industrial Co., Ltd. | Lens support mechanism, optical head device and optical information processor |
| JP4078147B2 (ja) * | 2002-08-13 | 2008-04-23 | キヤノン株式会社 | 回転角度検出装置及びその回転ディスク |
| JP2005038582A (ja) * | 2003-06-26 | 2005-02-10 | Victor Co Of Japan Ltd | 情報記録再生装置及び情報記録再生方法 |
| CN2677873Y (zh) * | 2003-10-15 | 2005-02-09 | 财团法人精密机械研究发展中心 | 非接触式厚度测量装置 |
| US7546780B2 (en) * | 2005-09-30 | 2009-06-16 | Rockwell Automation Technologies, Inc. | Sensor mounting structure allowing for adjustment of sensor position |
| JP5069419B2 (ja) * | 2006-03-28 | 2012-11-07 | パナソニックエコソリューションズ電路株式会社 | 受光器ホルダ |
| JP2007260871A (ja) * | 2006-03-29 | 2007-10-11 | Toyota Motor Corp | 加工装置および加工方法 |
| JP4529093B2 (ja) * | 2007-12-19 | 2010-08-25 | Smc株式会社 | 流体圧シリンダのピストン位置検出装置 |
| JP5448077B2 (ja) * | 2010-02-17 | 2014-03-19 | 株式会社リコー | 光学センサおよび画像形成装置 |
| CN102997952A (zh) * | 2012-12-03 | 2013-03-27 | 大连博控科技股份有限公司 | 传感器安装调整结构 |
-
2016
- 2016-04-15 JP JP2016081683A patent/JP6897004B2/ja active Active
-
2017
- 2017-03-29 KR KR1020170039896A patent/KR101889347B1/ko active Active
- 2017-03-30 CN CN201710201760.2A patent/CN107300393B/zh not_active Expired - Fee Related
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6366445A (ja) * | 1986-09-09 | 1988-03-25 | Ikegami Tsushinki Co Ltd | 外観検査装置 |
| JPH08178701A (ja) * | 1994-12-27 | 1996-07-12 | Canon Inc | 変位センサ |
| JPH08213673A (ja) * | 1995-02-08 | 1996-08-20 | Kubota Corp | 光学装置の支持構造 |
| JPH10261900A (ja) * | 1997-01-17 | 1998-09-29 | Matsushita Electric Ind Co Ltd | 実装部品の検査方法 |
| JPH1172503A (ja) * | 1997-08-29 | 1999-03-16 | Wako Denshi Kk | 圧延方向検出方法及び装置 |
| JP2006048380A (ja) * | 2004-08-04 | 2006-02-16 | Keyence Corp | 光学式変位計のデータ伝送方法及び光学式変位計 |
| JP2014041014A (ja) * | 2012-08-21 | 2014-03-06 | Yasuda Kogyo Kk | 計測システム及びその計測システムを備えた工作機械 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR101889347B1 (ko) | 2018-09-20 |
| CN107300393B (zh) | 2020-11-10 |
| CN107300393A (zh) | 2017-10-27 |
| KR20170118600A (ko) | 2017-10-25 |
| JP6897004B2 (ja) | 2021-06-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR100917514B1 (ko) | 스테레오 카메라 | |
| JP6169339B2 (ja) | 形状計測方法及び装置 | |
| CN109564091B (zh) | 立体相机 | |
| US20200401020A1 (en) | Stereo Camera Device | |
| EP2728378A1 (en) | Optical sensor | |
| JP5793122B2 (ja) | 車載画像処理装置 | |
| JP2009068906A (ja) | 距離測定装置 | |
| JP6700651B2 (ja) | ステレオカメラ装置 | |
| JP5193490B2 (ja) | 追尾式レーザ干渉計による測定方法 | |
| JP6114617B2 (ja) | 車載ステレオカメラ | |
| JP2013050352A (ja) | ステレオカメラの取り付け調整方法及びステレオカメラ | |
| EP2538172B1 (en) | Method for adjusting optical displacement sensor and method for manufacturing optical displacement sensor | |
| JP2017191059A (ja) | 光学式センサ取付用アダプタおよび光学式センサの取付位置の調整方法 | |
| WO2009088120A1 (en) | Self-compensating apparatus of interference-fringe-generating position to compensate optical path difference result from objectives lens working distance variation for environment temperature variation in regard of interference lens | |
| US6535290B1 (en) | Optical position measuring device with a beam splitter | |
| CN107036548B (zh) | 干涉物镜及基准表面单元组 | |
| JP4530019B2 (ja) | 撮像装置の調整方法 | |
| KR20190066664A (ko) | 듀얼 카메라 모듈 및 듀얼 카메라 모듈의 초점 조정 방법 | |
| US20170045353A1 (en) | Interferometric displacement sensor for integration into machine tools and semiconductor lithography systems | |
| JPH08328624A (ja) | センサとロボットとの結合方法及びロボットシステム | |
| JP6829977B2 (ja) | 形状測定装置 | |
| KR102321780B1 (ko) | 결정 방법, 광학 장치, 투영 광학계, 노광 장치 및 물품의 제조 방법 | |
| CN117319624A (zh) | 双目摄像装置及立体成像系统 | |
| JP2019215209A (ja) | 位置検出装置、レンズ装置、および、撮像装置 | |
| JP2014232080A (ja) | 測長装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190207 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200129 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200212 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200325 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200804 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200908 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210119 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210303 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210511 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210524 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6897004 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |