JP2017201854A - ワイヤレス給電装置、ワイヤレス受電装置およびワイヤレス電力伝送システム - Google Patents
ワイヤレス給電装置、ワイヤレス受電装置およびワイヤレス電力伝送システム Download PDFInfo
- Publication number
- JP2017201854A JP2017201854A JP2016092981A JP2016092981A JP2017201854A JP 2017201854 A JP2017201854 A JP 2017201854A JP 2016092981 A JP2016092981 A JP 2016092981A JP 2016092981 A JP2016092981 A JP 2016092981A JP 2017201854 A JP2017201854 A JP 2017201854A
- Authority
- JP
- Japan
- Prior art keywords
- circuit
- power
- wireless
- voltage
- wireless power
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images










Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—ELECTRIC POWER NETWORKS; CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J50/00—Circuit arrangements or systems for wireless supply or distribution of electric power
- H02J50/10—Circuit arrangements or systems for wireless supply or distribution of electric power using inductive coupling
- H02J50/12—Circuit arrangements or systems for wireless supply or distribution of electric power using inductive coupling of the resonant type
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—ELECTRIC POWER NETWORKS; CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J50/00—Circuit arrangements or systems for wireless supply or distribution of electric power
- H02J50/15—Circuit arrangements or systems for wireless supply or distribution of electric power using ultrasonic waves
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—ELECTRIC POWER NETWORKS; CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J50/00—Circuit arrangements or systems for wireless supply or distribution of electric power
- H02J50/90—Circuit arrangements or systems for wireless supply or distribution of electric power involving detection or optimisation of position, e.g. alignment
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04B—TRANSMISSION
- H04B5/00—Near-field transmission systems, e.g. inductive or capacitive transmission systems
- H04B5/70—Near-field transmission systems, e.g. inductive or capacitive transmission systems specially adapted for specific purposes
- H04B5/79—Near-field transmission systems, e.g. inductive or capacitive transmission systems specially adapted for specific purposes for data transfer in combination with power transfer
Landscapes
- Engineering & Computer Science (AREA)
- Computer Networks & Wireless Communication (AREA)
- Power Engineering (AREA)
- Signal Processing (AREA)
- Dc-Dc Converters (AREA)
- Inverter Devices (AREA)
- Near-Field Transmission Systems (AREA)
- Rectifiers (AREA)
Abstract
【課題】ワイヤレス電力伝送システムにおいて、簡素な回路で構成し、かつ共鳴周波数の制御を不要とする。【解決手段】ワイヤレス給電装置1は、ワイヤレス受電装置2に磁界結合で電力を送信する給電コイルL1と、給電コイルL1にパルス電力を出力する駆動回路12と、ワイヤレス受電装置2に生じた整流電圧Vaに係る整流電圧情報を、無線通信路を介して受信する第1の無線モジュールM1と、第1の無線モジュールM1が受信した整流電圧情報に基づき、ゲート信号G1〜G4を生成して駆動回路12を制御するとともに、駆動回路12の駆動周波数をワイヤレス受電装置2の共鳴回路のシリーズ共振周波数fsとパラレル共振周波数fpとの間の固定周波数で制御する制御回路11とを備える。【選択図】図1
Description
本発明は、ワイヤレス給電装置、ワイヤレス受電装置およびワイヤレス電力伝送システムに関する。
近年、金属接点やコネクタなどを介さずに電力を伝送するワイヤレス電力伝送技術を採用した機器が増えている。ワイヤレス電力伝送は、ワイヤレス給電や非接触電力伝達とも呼ばれる。
このワイヤレス電力伝送を大別すると、電力を電磁波(マイクロ波)に変換して給電する方式と、電界結合の共振現象を利用した方式と、磁界結合による方式とがある。この磁界結合による磁場の共振現象を利用するタイプには、例えば、特許文献1に記載の発明がある。
特許文献1の要約書の解決手段には、「給電コイルL2から受電コイルL3には磁気共振により電力が伝送される。VCO202は、スイッチングトランジスタQ1とスイッチングトランジスタQ2を駆動周波数foにて交互にオン・オフさせ、給電コイルL2に交流電力を供給し、給電コイルL2から受電コイルL3に交流電力を供給する。位相検出回路114は電流位相と電圧位相の位相差を検出し、VCO202はこの位相差がゼロとなるように駆動周波数foを調整する。負荷電圧が変化したときには電流位相の検出値が調整され、結果として駆動周波数foが調整される。」と記載されている。
特許文献1に記載の磁場共振型の方式では、給電側共鳴と受電側共鳴を一致させる必要がある。よって、共鳴周波数の制御が行われるが、給電コイルと受電コイルとの位置のずれや距離の変動に対して周波数を追従させるのは難しい場合がある。
そこで、本発明は、ワイヤレス給電装置、ワイヤレス受電装置およびワイヤレス電力伝送システムにおいて、簡素な回路構成で共鳴周波数の制御を不要とすることを課題とする。
前記した課題を解決するため、本発明のワイヤレス給電装置は、受電装置にワイヤレスで電力を送信(=送電)する給電コイルと、給電コイルに駆動するためのパルス電力を出力する駆動回路と、受電装置に生じた整流電圧に係る整流電圧情報を、無線通信路を介して受信する第1の無線モジュールと、この第1の無線モジュールが受信した整流電圧情報に基づき、駆動制御信号を生成して駆動回路を制御する制御回路とを備える。制御回路は、駆動回路の駆動周波数を前記受電装置の共鳴回路のシリーズ共振周波数とパラレル共振周波数との間の固定周波数で制御する。
その他の手段については、発明を実施するための形態のなかで説明する。
その他の手段については、発明を実施するための形態のなかで説明する。
本発明によれば、ワイヤレス給電装置、ワイヤレス受電装置およびワイヤレス電力伝送システムが簡素な回路で構成可能であり、かつ共鳴周波数の制御が不要となる。
以降、本発明を実施するための形態を、各図を参照して詳細に説明する。
図1は、本実施形態におけるワイヤレス電力伝送システムSの概略を示す構成図である。
ワイヤレス電力伝送システムSは、ワイヤレス給電装置1がワイヤレス受電装置2に対して磁界結合により電力を伝送するシステムである。以下、給電側と受電側それぞれの構成について説明する。
図1は、本実施形態におけるワイヤレス電力伝送システムSの概略を示す構成図である。
ワイヤレス電力伝送システムSは、ワイヤレス給電装置1がワイヤレス受電装置2に対して磁界結合により電力を伝送するシステムである。以下、給電側と受電側それぞれの構成について説明する。
給電側であるワイヤレス給電装置1は、直流電源18、制御回路11、フルブリッジ構成の駆動回路12、給電コイルL1、初期電圧制御回路13、第1の無線モジュールM1、レギュレータRe1を含んで構成される。
制御回路11は、初期電圧制御回路13や第1の無線モジュールM1が出力する信号に基づき、ゲート信号G1〜G4を生成して駆動回路12を制御する。このゲート信号G1〜G4は、駆動回路12を制御する駆動制御信号である。この制御回路11の電源端子VDCは、直流電源18に接続されており、直流電圧Vdcが印加されることにより制御回路11が動作する。更に制御回路11は、定電圧端子VREGから所定の定電圧Vregを初期電圧制御回路13に印加する。この制御回路11は、第1の無線モジュールM1が受信した整流電圧情報に基づき、パルス電力のオンデューティを可変制御するようにゲート信号G1〜G4を生成し、駆動回路12を制御する。
駆動回路12は、例えばPMOS(Q1,Q2)とNMOS(Q3,Q4)で構成されたフルブリッジ回路であり、ワイヤレス受電装置2側の共鳴周波数で駆動するためのパルス電力を給電コイルL1に出力する。ノードN1は、PMOS(Q1)とNMOS(Q3)とを接続する。ノードN2は、PMOS(Q2)とNMOS(Q4)とを接続する。このノードN1,N2には、給電コイルL1が接続される。
この駆動回路12は、直流電源18に接続されており、直流電圧Vdcが印加されて動作する。給電コイルL1は、ワイヤレス受電装置2の受電コイルL2に磁界結合で電力を送信する。なお、駆動回路12は、全てNMOSで構成してもよい。
駆動回路12は、例えばPMOS(Q1,Q2)とNMOS(Q3,Q4)で構成されたフルブリッジ回路であり、ワイヤレス受電装置2側の共鳴周波数で駆動するためのパルス電力を給電コイルL1に出力する。ノードN1は、PMOS(Q1)とNMOS(Q3)とを接続する。ノードN2は、PMOS(Q2)とNMOS(Q4)とを接続する。このノードN1,N2には、給電コイルL1が接続される。
この駆動回路12は、直流電源18に接続されており、直流電圧Vdcが印加されて動作する。給電コイルL1は、ワイヤレス受電装置2の受電コイルL2に磁界結合で電力を送信する。なお、駆動回路12は、全てNMOSで構成してもよい。
初期電圧制御回路13は、第1の所定電圧Va1を設定する初期電圧設定回路14と、初期電圧の設定を解除する初期電圧設定解除回路15とを備える。具体的にいうと、初期電圧設定回路14は、分圧抵抗R1,R2を含んで構成される。初期電圧設定解除回路15は、トランジスタQ5を含んで構成され、初期電圧のノードを、グランドの電位に落とす機能を有する。この初期電圧制御回路13は、制御回路11の定電圧端子VREGから所定の定電圧Vregが印加されて動作し、初期駆動制御信号Ssを端子FB1に出力する。制御回路11は、初期駆動制御信号Ssに基づき、ゲート信号G1〜G4のオンデューティの初期値を設定する。このとき、後記するワイヤレス受電装置2の2次側電源部28は、第2の無線モジュールM2が動作可能な第1の所定電圧Va1(例えば5V)を供給する。
第1の無線モジュールM1は、無線信号送受信回路16と、信号情報処理回路17を含んで構成される。無線信号送受信回路16は、ワイヤレス受電装置2の無線信号送受信回路26との間で無線通信路(無線路の一例)を介して信号を送受信する機能を有する。なお無線信号送受信回路16の電界強度と、後記する無線信号送受信回路26の電界強度は、いずれも35μV/m以下である。
なお、無線信号送受信回路16と無線信号送受信回路26との間の通信は、電波通信に限られず、可視光通信や赤外線通信や超音波通信などの無線通信であってもよく、限定されない。
なお、無線信号送受信回路16と無線信号送受信回路26との間の通信は、電波通信に限られず、可視光通信や赤外線通信や超音波通信などの無線通信であってもよく、限定されない。
信号情報処理回路17は、例えば記憶部と処理装置とを備えたマイクロコンピュータであり、不図示の給電制御プログラムを実行して制御回路11や初期電圧設定解除回路15を制御する。具体的にいうと、信号情報処理回路17は、制御信号(第1の制御信号)S1を制御回路11の端子FB2に出力して受電側に供給する電力をフィードバック制御する。更に信号情報処理回路17は、制御信号(第2の制御信号)S2を初期電圧設定解除回路15のトランジスタQ5のベースに出力してトランジスタQ5をオンさせて初期駆動制御信号Ssを0Vに設定する。更に信号情報処理回路17は、制御信号(第3の制御信号)S3を端子SDに出力して、制御回路11をシャットダウンさせる。
この第1の無線モジュールM1は、レギュレータRe1から駆動電圧V1(例えば、3.3V)の電力が供給されて動作する。レギュレータRe1は、直流電圧Vdcが印加されて駆動電圧V1の電力を供給する。
受電側であるワイヤレス受電装置2は、共鳴回路21、整流回路22、DC/DCコンバータ(直流変換回路;負荷の一例)23、整流電圧検出回路24、第2の無線モジュール(第2の無線モジュールの一例)M2、レギュレータRe2を含んで構成される。
共鳴回路21は、受電コイルL2と共鳴コンデンサC1とが並列接続されたLC共鳴回路である。この共鳴回路21は、ワイヤレス給電装置1の給電コイルL1から磁界結合で電力を受信(=受電)し、共鳴電圧を生成する。共鳴回路21は、ノードN3,N4を介して整流回路22に接続される。なお、破線で示すトランスTは、給電コイルL1と受電コイルL2とで構成される。
整流回路22は、入力された交流を直流に整流するダイオードブリッジDBと、整流した電圧を平滑化する整流コンデンサC2とを含んで構成される。これにより整流電圧Vaの電力が出力され、DC/DCコンバータ23、整流電圧検出回路24、レギュレータRe2に供給される。2次側電源部28は、共鳴回路21と整流回路22を含んで構成される。
整流回路22は、入力された交流を直流に整流するダイオードブリッジDBと、整流した電圧を平滑化する整流コンデンサC2とを含んで構成される。これにより整流電圧Vaの電力が出力され、DC/DCコンバータ23、整流電圧検出回路24、レギュレータRe2に供給される。2次側電源部28は、共鳴回路21と整流回路22を含んで構成される。
第2の無線モジュールM2は、無線信号送受信回路26と、信号情報処理回路27とを含んで構成され、レギュレータRe2から駆動電圧V2(例えば、3.3V)の電力が供給されて動作する。
無線信号送受信回路26は、ワイヤレス給電装置1との間で無線通信路を介して信号を送受信する機能を有する。信号情報処理回路27は、例えば記憶部と処理装置とを備えたマイクロコンピュータである。この信号情報処理回路27は、不図示の受電制御プログラムを実行して、整流電圧検出回路24の検出電圧V3を計測して検出信号(整流電圧情報)Svを生成し、この検出信号Svを無線信号送受信回路26によってワイヤレス給電装置1に送信する。更に信号情報処理回路27は、制御信号S4をDC/DCコンバータ23に出力して、このDC/DCコンバータ23を起動または停止させる。
無線信号送受信回路26は、ワイヤレス給電装置1との間で無線通信路を介して信号を送受信する機能を有する。信号情報処理回路27は、例えば記憶部と処理装置とを備えたマイクロコンピュータである。この信号情報処理回路27は、不図示の受電制御プログラムを実行して、整流電圧検出回路24の検出電圧V3を計測して検出信号(整流電圧情報)Svを生成し、この検出信号Svを無線信号送受信回路26によってワイヤレス給電装置1に送信する。更に信号情報処理回路27は、制御信号S4をDC/DCコンバータ23に出力して、このDC/DCコンバータ23を起動または停止させる。
DC/DCコンバータ23は、2次側電源部28から第2の所定電圧Va2(例えば、12V)の電力が供給されると、これを別の出力電圧Voutの電力に変換する回路である。DC/DCコンバータ23の出力電圧Voutにより、負荷29が駆動する。DC/DCコンバータ23と負荷29とは、このワイヤレス受電装置2における負荷に相当する。このDC/DCコンバータ23は、第2の無線モジュールM2から出力される制御信号(第4の制御信号)S4により起動または停止する。
整流電圧検出回路24は、分圧抵抗R3,R4を含んで構成され、整流電圧Vaを分圧した検出電圧V3を、第2の無線モジュールM2の信号情報処理回路27に印加する。
整流電圧検出回路24は、分圧抵抗R3,R4を含んで構成され、整流電圧Vaを分圧した検出電圧V3を、第2の無線モジュールM2の信号情報処理回路27に印加する。
この第2の無線モジュールM2は、レギュレータRe2から駆動電圧V2(例えば、3.3V)の電力が供給されて動作する。レギュレータRe2は、整流電圧Vaが印加されて駆動電圧V2の電力を供給する。
図2は、ワイヤレス受電装置2からみた磁界結合回路の等価回路30の図である。
給電コイルL1と受電コイルL2とで構成されるトランスT(図1参照)を等価回路30として描くと、理想トランスTiと、2本のリーケージインダクタンスLeと、相互インダクタンスMで構成される。この理想トランスTiは、1次側と2次側の巻線比が1対Nである。理想トランスTiの1次側は、それぞれノードN1,N2への接続が想定される。理想トランスTiの2次側の一端は、2つのリーケージインダクタンスLeを介して共鳴コンデンサC1の一端およびノードN3に接続される。理想トランスTiの2次側の他端は、共鳴コンデンサC1の一端およびノードN4に接続される。相互インダクタンスMは、2つのリーケージインダクタンスLeの接続点と、理想トランスTiの2次側の他端との間に接続される。
給電コイルL1と受電コイルL2とで構成されるトランスT(図1参照)を等価回路30として描くと、理想トランスTiと、2本のリーケージインダクタンスLeと、相互インダクタンスMで構成される。この理想トランスTiは、1次側と2次側の巻線比が1対Nである。理想トランスTiの1次側は、それぞれノードN1,N2への接続が想定される。理想トランスTiの2次側の一端は、2つのリーケージインダクタンスLeを介して共鳴コンデンサC1の一端およびノードN3に接続される。理想トランスTiの2次側の他端は、共鳴コンデンサC1の一端およびノードN4に接続される。相互インダクタンスMは、2つのリーケージインダクタンスLeの接続点と、理想トランスTiの2次側の他端との間に接続される。
このとき、等価回路30で示された給電コイルL1と受電コイルL2とで構成されるトランスTの結合係数kは、以下の式(1)で求められる。

また、リーケージインダクタンスLeは、以下の式(2)で求められる。
なお、受電コイルL2の自己インダクタンスl2は、以下の式(3)で表わされる。
そして、ワイヤレス受電装置2のシリーズ共振周波数fsは、以下の式(4)で求められる。
ワイヤレス受電装置2のパラレル共振周波数fpは、以下の式(5)で求められる。
式(4)から解るように、シリーズ共振周波数fsは、リーケージインダクタンスLeと共鳴コンデンサの容量C1とで決定される。また式(5)から解るように、パラレル共振周波数fpは、受電コイルL2の自己インダクタンスl2と共鳴コンデンサの容量C1とで決定される。
式(2)から解るように、磁界結合回路の給電コイルL1と受電コイルL2の距離が変わると、結合係数kが変わるため、リーケージインダクタンスLeが変わる。したがって、式(4)から解るように、ワイヤレス受電装置2のシリーズ共振周波数fsは距離によって変動する。
しかし、式(3)のように、受電コイルL2の自己インダクタンスl2は、相互インダクタンスMとリーケージインダクタンスLeとの和である。リーケージインダクタンスLeが大きくなると相互インダクタンスMは小さくなるため、その和は一定である。ゆえに、式(5)から解るように、ワイヤレス受電装置2のパラレル共振周波数fpは距離に関係なく一定である。
式(2)から解るように、磁界結合回路の給電コイルL1と受電コイルL2の距離が変わると、結合係数kが変わるため、リーケージインダクタンスLeが変わる。したがって、式(4)から解るように、ワイヤレス受電装置2のシリーズ共振周波数fsは距離によって変動する。
しかし、式(3)のように、受電コイルL2の自己インダクタンスl2は、相互インダクタンスMとリーケージインダクタンスLeとの和である。リーケージインダクタンスLeが大きくなると相互インダクタンスMは小さくなるため、その和は一定である。ゆえに、式(5)から解るように、ワイヤレス受電装置2のパラレル共振周波数fpは距離に関係なく一定である。
給電コイルL1と受電コイルL2とが所定の距離において、ワイヤレス受電装置2の共鳴周波数は、シリーズ共振周波数fsとパラレル共振周波数fpである。給電コイルL1と受電コイルL2の距離が離れているため結合係数kは小さくなり、よってシリーズ共振周波数fsとパラレル共振周波数fpとの間隔は狭くなる。
給電コイルL1と受電コイルL2とで構成されるトランスTの結合係数kが小さいことにより受電コイルL2のリーケージインダクタンスLeが大きくなる。よって、2つのリーケージインダクタンスLeと共鳴コンデンサC1によるシリーズ共振周波数fsは、受電コイルL2の自己インダクタンスl2と共鳴コンデンサC1によるパラレル共振周波数fpに近接することになる。制御回路11(図1参照)は、パラレル共振周波数fpとシリーズ共振周波数fsとの間の固定周波数で給電コイルL1をパルス駆動することで、共鳴周波数の制御をしなくとも、効率よく電力を伝送できる。
本実施形態では、ワイヤレス受電装置2の共鳴周波数を、受電側のシリーズ共振周波数fsとパラレル共振周波数fpとの間の周波数に設定(固定)している。これにより給電コイルL1と受電コイルL2との距離に多少変動があっても、ワイヤレス給電装置1からワイヤレス受電装置2に効率よく電力を伝送することが可能となる。また、部品バラツキによりワイヤレス給電装置1の駆動周波数が変動したとしても、効率良く電力を伝送することが可能となる。
図3は、制御回路11の構成を示す図である。
制御回路11は、レギュレータ111、オペアンプ112,113、比較器114、ロジック回路115、発振回路116を含んで構成される。この制御回路11は、電源端子VDC、グランド端子GND、定電圧Vregを出力する定電圧端子VREGと、入力側の反転入力端子FB1,FB2および端子SDと、出力端子FB0と、発振回路116の周波数を設定する端子RT,CTと、出力側の端子G1,G2,G3,G4と、を含んでいる。
電源端子VDCには直流電圧Vdcが印加され、グランド端子GNDはグランドに接続される。
制御回路11は、レギュレータ111、オペアンプ112,113、比較器114、ロジック回路115、発振回路116を含んで構成される。この制御回路11は、電源端子VDC、グランド端子GND、定電圧Vregを出力する定電圧端子VREGと、入力側の反転入力端子FB1,FB2および端子SDと、出力端子FB0と、発振回路116の周波数を設定する端子RT,CTと、出力側の端子G1,G2,G3,G4と、を含んでいる。
電源端子VDCには直流電圧Vdcが印加され、グランド端子GNDはグランドに接続される。
レギュレータ111は、定電圧Vregを生成し、電源端子VDCとグランド端子GNDに接続されて、直流電圧Vdcから生成した定電圧Vregを定電圧端子VREGに出力する。
オペアンプ112の反転入力端子FB1と出力端子FB0の間にと抵抗R6が接続される。オペアンプ112は、反転入力端子FB1に初期電圧制御回路13の初期電圧設定回路14から初期駆動制御信号Ssが入力されたとき、基準電圧Vref1と初期駆動制御信号Ssとの電位差に応じた出力信号SsCを出力する。
オペアンプ113の反転入力端子FB2と出力端子FB0の間に抵抗R7が接続される。オペアンプ113は、反転入力端子FB2に第1の無線モジュールM1の信号情報処理回路17から制御信号S1が入力されたとき、基準電圧Vref2と制御信号S1の電位差に応じた出力信号S1Cを出力する。
オペアンプ113の反転入力端子FB2と出力端子FB0の間に抵抗R7が接続される。オペアンプ113は、反転入力端子FB2に第1の無線モジュールM1の信号情報処理回路17から制御信号S1が入力されたとき、基準電圧Vref2と制御信号S1の電位差に応じた出力信号S1Cを出力する。
比較器114の反転入力端子には、これらオペアンプ112,113の出力端子FB0が接続されて出力信号SsCまたは出力信号S1Cのうち電圧の低い方が入力され、非反転入力端子には発振回路116の三角波信号Stが入力される。これにより、反転入力端子に印加された電圧に応じたオンデューティのパルス信号を生成することができる。
ロジック回路115は、入力側に比較器114の出力端子と、三角波信号Stと、端子SDとが接続され、出力側にゲート信号の出力端子が接続される。このロジック回路115は、三角波信号Stの上限ピーク、下限ピークと比較器114から入力されたパルス信号の立ち下がりからゲート信号G1,G2とゲート信号G3,G4とをそれぞれ生成する。ロジック回路115は、端子SDに第1の無線モジュールM1の信号情報処理回路17から制御信号S3が入力されると、ゲート信号G1〜G4の出力動作を停止する。
発振回路116は、端子RTに抵抗R5が接続され、端子CTにコンデンサC3が接続されて発振し、三角波を出力する。
ロジック回路115は、入力側に比較器114の出力端子と、三角波信号Stと、端子SDとが接続され、出力側にゲート信号の出力端子が接続される。このロジック回路115は、三角波信号Stの上限ピーク、下限ピークと比較器114から入力されたパルス信号の立ち下がりからゲート信号G1,G2とゲート信号G3,G4とをそれぞれ生成する。ロジック回路115は、端子SDに第1の無線モジュールM1の信号情報処理回路17から制御信号S3が入力されると、ゲート信号G1〜G4の出力動作を停止する。
発振回路116は、端子RTに抵抗R5が接続され、端子CTにコンデンサC3が接続されて発振し、三角波を出力する。
図4(a)〜(f)は、制御回路11の動作を説明する波形図であり、各波形図の横軸は共通する時間を示している。
図4(a)は、発振回路116から出力されて比較器114の非反転入力端子に入力される三角波信号Stの波形である。三角波信号Stは常に、周期T0でランプ波形を繰り返す。この周期T0は、2倍して、その逆数を計算すると受電側の共鳴周波数となるように設定されている。図4(a)の横軸方向の最も細かい破線は、起動直後におけるオペアンプ112の出力信号SsCの電圧を示している。この出力信号SsCの電圧は、比較器114の反転入力端子に印加される。このとき、整流回路22から出力される整流電圧Vaは、第1の所定電圧Va1(例えば、5V)となる。
図4(a)は、発振回路116から出力されて比較器114の非反転入力端子に入力される三角波信号Stの波形である。三角波信号Stは常に、周期T0でランプ波形を繰り返す。この周期T0は、2倍して、その逆数を計算すると受電側の共鳴周波数となるように設定されている。図4(a)の横軸方向の最も細かい破線は、起動直後におけるオペアンプ112の出力信号SsCの電圧を示している。この出力信号SsCの電圧は、比較器114の反転入力端子に印加される。このとき、整流回路22から出力される整流電圧Vaは、第1の所定電圧Va1(例えば、5V)となる。
横軸方向の2番目に粗い破線は、例えば負荷が軽い場合のオペアンプ113の出力信号S1Caの電圧を示している。この出力信号S1Caの電圧は、比較器114の反転入力端子に印加される。
横軸方向の最も粗い破線は、負荷が重い場合のオペアンプ113の出力信号S1Cbの電圧を示している。この出力信号S1Cbの電圧は、比較器114の反転入力端子に印加される。このとき、整流回路22から出力される整流電圧Vaは、第2の所定電圧Va2(例えば、12V)となる。
横軸方向の最も粗い破線は、負荷が重い場合のオペアンプ113の出力信号S1Cbの電圧を示している。この出力信号S1Cbの電圧は、比較器114の反転入力端子に印加される。このとき、整流回路22から出力される整流電圧Vaは、第2の所定電圧Va2(例えば、12V)となる。
図4(b)は、ゲート信号G1の波形である。
細かい破線は、起動直後におけるゲート信号G1を示している。粗い破線は、例えば負荷が軽い場合のゲート信号G1を示している。実線は、負荷が重い場合のゲート信号G1を示している。三角波信号Stの上限ピークの2回の1回ごとにゲート信号G1が立ち上がり、三角波信号Stが比較器114の反転入力端子の電圧を超えた所定時間経過後にゲート信号G1が立ち下がる。このゲート信号G1がLowレベルのときに、PMOS(Q1)がオンする。
細かい破線は、起動直後におけるゲート信号G1を示している。粗い破線は、例えば負荷が軽い場合のゲート信号G1を示している。実線は、負荷が重い場合のゲート信号G1を示している。三角波信号Stの上限ピークの2回の1回ごとにゲート信号G1が立ち上がり、三角波信号Stが比較器114の反転入力端子の電圧を超えた所定時間経過後にゲート信号G1が立ち下がる。このゲート信号G1がLowレベルのときに、PMOS(Q1)がオンする。
図4(c)は、ゲート信号G2の波形である。
細かい破線は、起動直後におけるゲート信号G2を示している。粗い破線は、例えば負荷が軽い場合のゲート信号G2を示している。実線は、負荷が重い場合のゲート信号G2を示している。三角波信号Stの上限ピークの2回の1回ごとにゲート信号G2が立ち上がり、三角波信号Stが比較器114の反転入力端子の電圧を超えた所定時間経過後にゲート信号G2が立ち下がる。このゲート信号G2がLowレベルのときに、PMOS(Q2)がオンする。
細かい破線は、起動直後におけるゲート信号G2を示している。粗い破線は、例えば負荷が軽い場合のゲート信号G2を示している。実線は、負荷が重い場合のゲート信号G2を示している。三角波信号Stの上限ピークの2回の1回ごとにゲート信号G2が立ち上がり、三角波信号Stが比較器114の反転入力端子の電圧を超えた所定時間経過後にゲート信号G2が立ち下がる。このゲート信号G2がLowレベルのときに、PMOS(Q2)がオンする。
図4(d)は、ゲート信号G3の波形である。
細かい破線は、起動直後におけるゲート信号G3を示している。粗い破線は、例えば負荷が軽い場合のゲート信号G3を示している。実線は、負荷が重い場合のゲート信号G3を示している。三角波信号Stの下限ピークの2回の1回ごとにゲート信号G3が立ち上がり、三角波信号Stが比較器114の反転入力端子の電圧を超えたときにゲート信号G3が立ち下がる。このゲート信号G3がHighレベルのときに、NMOS(Q3)がオンする。
細かい破線は、起動直後におけるゲート信号G3を示している。粗い破線は、例えば負荷が軽い場合のゲート信号G3を示している。実線は、負荷が重い場合のゲート信号G3を示している。三角波信号Stの下限ピークの2回の1回ごとにゲート信号G3が立ち上がり、三角波信号Stが比較器114の反転入力端子の電圧を超えたときにゲート信号G3が立ち下がる。このゲート信号G3がHighレベルのときに、NMOS(Q3)がオンする。
図4(e)は、ゲート信号G4の波形である。
細かい破線は、起動直後におけるゲート信号G4を示している。粗い破線は、例えば負荷が軽い場合のゲート信号G4を示している。実線は、負荷が重い場合のゲート信号G4を示している。三角波信号Stの下限ピークの2回の1回ごとにゲート信号G4が立ち上がり、三角波信号Stが比較器114の反転入力端子の電圧を超えたときにゲート信号G4が立ち下がる。このゲート信号G4がHighレベルのときに、NMOS(Q4)がオンする。
細かい破線は、起動直後におけるゲート信号G4を示している。粗い破線は、例えば負荷が軽い場合のゲート信号G4を示している。実線は、負荷が重い場合のゲート信号G4を示している。三角波信号Stの下限ピークの2回の1回ごとにゲート信号G4が立ち上がり、三角波信号Stが比較器114の反転入力端子の電圧を超えたときにゲート信号G4が立ち下がる。このゲート信号G4がHighレベルのときに、NMOS(Q4)がオンする。
図4(f)は、給電コイルL1に印加されるコイル電圧Vlの波形である。
このコイル電圧Vlは、正のパルスと零電圧と負のパルスとが周期的に繰り返す波形である。細かい破線は、起動直後におけるコイル電圧Vlを示している。粗い破線は、例えば負荷が軽い場合のコイル電圧Vlを示している。実線は、負荷が重い場合のコイル電圧Vlを示している。ゲート信号G1がLowレベルでゲート信号G4がHighレベルならばコイル電圧Vlは負のパルス、ゲート信号G2がLowレベルでゲート信号G3がHighレベルならばコイル電圧Vlは正のパルスとなる。
このコイル電圧Vlは、正のパルスと零電圧と負のパルスとが周期的に繰り返す波形である。細かい破線は、起動直後におけるコイル電圧Vlを示している。粗い破線は、例えば負荷が軽い場合のコイル電圧Vlを示している。実線は、負荷が重い場合のコイル電圧Vlを示している。ゲート信号G1がLowレベルでゲート信号G4がHighレベルならばコイル電圧Vlは負のパルス、ゲート信号G2がLowレベルでゲート信号G3がHighレベルならばコイル電圧Vlは正のパルスとなる。
細かい破線は、起動直後におけるコイル電圧Vlを示している。コイル電圧Vlは、正のパルスを期間T1に亘って出力したのち零電圧となり、負のパルスを期間T2に亘って出力したのち零電圧となり、これを繰り返す。期間T1と期間T2とは等しい。
粗い破線は、例えば負荷が軽い場合のコイル電圧Vlを示している。コイル電圧Vlは、正のパルスを期間T3に亘って出力したのち零電圧となり、負のパルスを期間T4に亘って出力したのち零電圧となり、これを繰り返す。期間T3と期間T4とは等しい。
粗い破線は、例えば負荷が軽い場合のコイル電圧Vlを示している。コイル電圧Vlは、正のパルスを期間T3に亘って出力したのち零電圧となり、負のパルスを期間T4に亘って出力したのち零電圧となり、これを繰り返す。期間T3と期間T4とは等しい。
実線は、負荷が重い場合のコイル電圧Vlを示している。コイル電圧Vlは、正のパルスを期間T5に亘って出力したのち零電圧となり、負のパルスを期間T6に亘って出力したのち零電圧となり、これを繰り返す。期間T5と期間T6とは等しい。このように制御回路11は、受電側の共鳴周波数かつ所定のオンデューティを有するゲート信号G1〜G4を生成して駆動回路12を制御する。これによりワイヤレス電力伝送システムSを簡素な回路で構成可能であり、かつ共鳴周波数の制御が不要となる。
図4(f)に示すようにコイル電圧Vlの波形は、正のパルスと負のパルスとが対称性(シンメトリー)を保って出力されている。これにより、受電側の共鳴回路21に生じる共鳴電圧に対称性を持たせることができる。
図4(f)に示すようにコイル電圧Vlの波形は、正のパルスと負のパルスとが対称性(シンメトリー)を保って出力されている。これにより、受電側の共鳴回路21に生じる共鳴電圧に対称性を持たせることができる。
(動作説明)
図5は、第1の無線モジュールM1と第2の無線モジュールM2の通信設定までの動作を示すフローチャートであり、図6は、電力調整の動作を示すフローチャートである。図7は、出力電圧異常時の動作を示すフローチャートであり、図8は、無線モジュール間の通信路確立エラー時の動作を示すフローチャートである。図9は、DC/DCコンバータ23の制御動作を示すフローチャートである。
図5は、第1の無線モジュールM1と第2の無線モジュールM2の通信設定までの動作を示すフローチャートであり、図6は、電力調整の動作を示すフローチャートである。図7は、出力電圧異常時の動作を示すフローチャートであり、図8は、無線モジュール間の通信路確立エラー時の動作を示すフローチャートである。図9は、DC/DCコンバータ23の制御動作を示すフローチャートである。
図5に示すように、ワイヤレス給電装置1にて直流電源18が、各部に対して直流電圧Vdcの供給を開始する(ステップS10)。これによりレギュレータRe1が起動して(ステップS13)駆動電圧V1の電力の供給を開始し、第1の無線モジュールM1が起動する(ステップS14)。更に制御回路11が起動を開始し(ステップS11)、駆動回路12と給電コイルL1により、初期駆動制御信号Ssに応じた第1の電力を送信する。
すると、この初期駆動制御信号Ssに応じた第1の電力をワイヤレス受電装置2の2次側電源部28が受信する(ステップS15)。これによりレギュレータRe2が起動して(ステップS16)駆動電圧V2の電力の供給を開始し、第2の無線モジュールM2が起動する(ステップS17)。
次いで第1の無線モジュールM1と第2の無線モジュールM2とは、両者間の通信設定を行い(ステップS18)、以降は図6に示す電力調整を行う。
次いで第1の無線モジュールM1と第2の無線モジュールM2とは、両者間の通信設定を行い(ステップS18)、以降は図6に示す電力調整を行う。
図6は、電力調整の動作を示すフローチャートである。
ステップS15にて2次側電源部28が整流電圧Vaの電力を供給するので、ワイヤレス受電装置2の第2の無線モジュールM2には、整流電圧Vaを分圧抵抗R3,R4で分圧した検出電圧V3が印加されている。第2の無線モジュールM2は、この検出電圧V3を計測し、整流電圧Vaに係る整流電圧情報である検出信号Svを生成し、この検出信号Svを無線通信路により送信する(ステップS20)。
この検出信号Svを、ワイヤレス給電装置1の第1の無線モジュールM1が無線通信路を介して受信したならば(ステップS21→Yes)、制御信号(第2の制御信号)S2を初期電圧設定解除回路15に出力する(ステップS22)。これにより初期電圧制御回路13は、動作を停止する(ステップS23)。同時に第1の無線モジュールM1は、この検出信号Svに基づく制御信号(第1の制御信号)S1を、制御回路11に出力する(ステップS24)。
ステップS15にて2次側電源部28が整流電圧Vaの電力を供給するので、ワイヤレス受電装置2の第2の無線モジュールM2には、整流電圧Vaを分圧抵抗R3,R4で分圧した検出電圧V3が印加されている。第2の無線モジュールM2は、この検出電圧V3を計測し、整流電圧Vaに係る整流電圧情報である検出信号Svを生成し、この検出信号Svを無線通信路により送信する(ステップS20)。
この検出信号Svを、ワイヤレス給電装置1の第1の無線モジュールM1が無線通信路を介して受信したならば(ステップS21→Yes)、制御信号(第2の制御信号)S2を初期電圧設定解除回路15に出力する(ステップS22)。これにより初期電圧制御回路13は、動作を停止する(ステップS23)。同時に第1の無線モジュールM1は、この検出信号Svに基づく制御信号(第1の制御信号)S1を、制御回路11に出力する(ステップS24)。
制御回路11は、制御信号S1の電圧と、オペアンプ113の基準電圧Vref2とを比較する(ステップS25)。そして、制御回路11は、制御信号S1がオペアンプ113の基準電圧Vref2よりも小さいならば(ステップS26→Yes)、この電位差に応じてフルブリッジのスイッチ素子のゲートオン・デューティを広げる(ステップS27)。制御回路11は、制御信号S1がオペアンプ113の基準電圧Vref2よりも大きいならば(ステップS28→Yes)、この電位差に応じてフルブリッジのスイッチ素子のゲートオン・デューティを狭める(ステップS29)。制御信号S1がオペアンプ113の基準電圧Vref2と等しいならば(ステップS28→No)、ステップS30の処理に進み、制御信号S1に応じた第2の電力を送信する。これによりワイヤレス電力伝送システムSは、制御信号S1の電圧がオペアンプ113の基準電圧Vref2に近づくようにフィードバック制御している。
ステップS27,S29の処理の後、制御回路11は、駆動回路12と給電コイルL1により、制御信号S1に応じた第2の電力を送信する(ステップS30)。ここで送信された制御信号S1に応じた第2の電力が、ワイヤレス受電装置2の2次側電源部28によって受信され(ステップS31)、再びステップS20の処理に戻る。これにより、2次側電源部28が生成する整流電圧Vaは、所定値(第2の所定電圧Va2;例えば、12V)になるようにフィードバック制御される。
図7は、出力電圧異常時の処理を示すフローチャートである。この処理は、図6のステップS30の後に実行される。
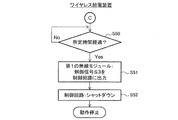
ワイヤレス受電装置2の第2の無線モジュールM2は、検出信号Svにより、整流電圧Vaが第2の所定電圧Va2の近傍の値であるか否かを判定する(ステップS40)。第2の無線モジュールM2は、整流電圧Vaが第2の所定電圧Va2を所定値以上超えるか(例えば、24V以上)、または第2の所定電圧Va2の所定値未満(例えば、5V未満)ならば出力電圧が異常状態であると判定し、この状態が所定時間に亘って継続するか否かを判定する(ステップS41)。
第2の所定電圧Va2を所定値以上超えるか、または第2の所定電圧Va2の所定値未満の状態が所定時間に亘って継続した場合(ステップS41→Yes)、第2の無線モジュールM2は、出力エラー信号を第1の無線モジュールM1に送信する(ステップS42)。第1の無線モジュールM1は、この出力エラー信号を受信すると(ステップS43)、制御回路11の端子SDに制御信号S3を出力する(ステップS44)。これにより制御回路11はシャットダウンし(ステップS45)、ワイヤレス給電装置1は、電力の伝送を停止する。
ワイヤレス受電装置2の第2の無線モジュールM2は、検出信号Svにより、整流電圧Vaが第2の所定電圧Va2の近傍の値であるか否かを判定する(ステップS40)。第2の無線モジュールM2は、整流電圧Vaが第2の所定電圧Va2を所定値以上超えるか(例えば、24V以上)、または第2の所定電圧Va2の所定値未満(例えば、5V未満)ならば出力電圧が異常状態であると判定し、この状態が所定時間に亘って継続するか否かを判定する(ステップS41)。
第2の所定電圧Va2を所定値以上超えるか、または第2の所定電圧Va2の所定値未満の状態が所定時間に亘って継続した場合(ステップS41→Yes)、第2の無線モジュールM2は、出力エラー信号を第1の無線モジュールM1に送信する(ステップS42)。第1の無線モジュールM1は、この出力エラー信号を受信すると(ステップS43)、制御回路11の端子SDに制御信号S3を出力する(ステップS44)。これにより制御回路11はシャットダウンし(ステップS45)、ワイヤレス給電装置1は、電力の伝送を停止する。
図8は、無線モジュール間の通信路確立エラー時の処理を示すフローチャートである。この処理は、図6のステップS21にて、第1の無線モジュールM1が検出信号Svを受信しなかったとき(ステップS21→No)に実行される。
ワイヤレス給電装置1の第1の無線モジュールM1は、所定時間が経過していないならば(ステップS50→No)、この判定を繰り返し、所定時間が経過したならば(ステップS50→Yes)、制御回路11の端子SDに制御信号S3を出力する(ステップS51)。これにより制御回路11はシャットダウンし(ステップS52)、ワイヤレス給電装置1は、電力の伝送を停止する。
ワイヤレス給電装置1の第1の無線モジュールM1は、所定時間が経過していないならば(ステップS50→No)、この判定を繰り返し、所定時間が経過したならば(ステップS50→Yes)、制御回路11の端子SDに制御信号S3を出力する(ステップS51)。これにより制御回路11はシャットダウンし(ステップS52)、ワイヤレス給電装置1は、電力の伝送を停止する。
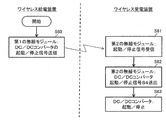
図9は、DC/DCコンバータ23の制御動作を示すフローチャートである。
ワイヤレス給電装置1の第1の無線モジュールM1は、例えば不図示の上位装置などの指示を受けて、DC/DCコンバータ23の起動信号または停止信号を送信する(ステップS60)。
この起動信号または停止信号を、ワイヤレス受電装置2の第2の無線モジュールM2が受信すると(ステップS61)、DC/DCコンバータ23に対して起動/停止を指示する制御信号S4を出力する(ステップS62)。これによりDC/DCコンバータ23は、起動または停止を行う(ステップS63)。
ワイヤレス給電装置1の第1の無線モジュールM1は、例えば不図示の上位装置などの指示を受けて、DC/DCコンバータ23の起動信号または停止信号を送信する(ステップS60)。
この起動信号または停止信号を、ワイヤレス受電装置2の第2の無線モジュールM2が受信すると(ステップS61)、DC/DCコンバータ23に対して起動/停止を指示する制御信号S4を出力する(ステップS62)。これによりDC/DCコンバータ23は、起動または停止を行う(ステップS63)。
図10は、起動から電力調整までを示すシーケンス図であり、図5と図6のフローチャートによる動作の一例を示している。
磁界結合型のワイヤレス電力伝送システムSが起動し、直流電源18が、レギュレータRe1、制御回路11などに対して直流電圧Vdcの電力の供給を開始する(シーケンスQ10)。これにより、制御回路11は動作を開始し(シーケンスQ11)、レギュレータRe1は、直流電圧Vdcを駆動電圧V1に変換して、第1の無線モジュールM1に供給し(シーケンスQ12)、第1の無線モジュールM1を起動させる(シーケンスQ13)。制御回路11は、定電圧Vregの電力を生成して初期電圧制御回路13に供給する。初期電圧制御回路13は、初期電圧設定回路14の分圧抵抗R1,R2で分圧した電圧を初期駆動制御信号Ssとして、制御回路11の端子FB1に印加する(シーケンスQ14)。この初期駆動制御信号Ssは、ワイヤレス受電装置2の2次側電源部28から出力される整流電圧Vaが第1の所定電圧Va1(例えば、5V)となるように予め設定されている。
磁界結合型のワイヤレス電力伝送システムSが起動し、直流電源18が、レギュレータRe1、制御回路11などに対して直流電圧Vdcの電力の供給を開始する(シーケンスQ10)。これにより、制御回路11は動作を開始し(シーケンスQ11)、レギュレータRe1は、直流電圧Vdcを駆動電圧V1に変換して、第1の無線モジュールM1に供給し(シーケンスQ12)、第1の無線モジュールM1を起動させる(シーケンスQ13)。制御回路11は、定電圧Vregの電力を生成して初期電圧制御回路13に供給する。初期電圧制御回路13は、初期電圧設定回路14の分圧抵抗R1,R2で分圧した電圧を初期駆動制御信号Ssとして、制御回路11の端子FB1に印加する(シーケンスQ14)。この初期駆動制御信号Ssは、ワイヤレス受電装置2の2次側電源部28から出力される整流電圧Vaが第1の所定電圧Va1(例えば、5V)となるように予め設定されている。
制御回路11は、期間T1,T2のパルス幅(オン・デューティ)の矩形波を出力して駆動回路12を制御する(シーケンスQ15)。フルブリッジ構成の駆動回路12は、給電コイルL1を受電側の共鳴周波数の矩形波で駆動し、電力を伝送する(シーケンスQ16)。この矩形波の駆動周波数は、給電コイルL1と受電コイルL2との距離を所定の範囲内としたときのパラレル共振周波数fpとシリーズ共振周波数fsとの間の固定周波数とすることで、電力送電効率を高めることができる。更に給電コイルL1を駆動するパルス電圧のON時間は、図4(b)〜(f)に示したようにシンメトリーとする。
2次側電源部28は、ワイヤレス電力を受信する受電コイルL2と、共鳴コンデンサC1とを含む共鳴回路21で共鳴電圧を生成し、この共鳴電圧をダイオードブリッジDBで整流した整流電圧Vaを生成する。この整流電圧Vaの電力は、第1の所定電圧Va1(例えば、5V)であり、レギュレータRe2と整流電圧検出回路24に供給される(シーケンスQ17)。なお、整流電圧Vaは、DC/DCコンバータ23にも印加されるが、このDC/DCコンバータ23は5Vでは動作しないため、図示を省略している。
レギュレータRe2は、第1の所定電圧Va1の電力を駆動電圧V2の電力に変換して、第2の無線モジュールM2に供給し(シーケンスQ18)、第2の無線モジュールM2を起動させる(シーケンスQ19)。第1の無線モジュールM1は、第2の無線モジュールM2と相互通信状態に設定して、無線通信路を確立する(シーケンスQ20)。
整流電圧Vaが第2の所定電圧Va2(例えば12V)になるように、以下の動作を行う。
整流電圧検出回路24は、整流電圧Vaを分圧抵抗R3,R4で分圧した検出電圧V3を生成する(シーケンスQ21)。この検出電圧V3は、第2の無線モジュールM2の信号情報処理回路27(マイコン)によって計測されて検出信号Svが生成される。整流電圧Vaに係る整流電圧情報である検出信号Svは、フィードバック信号として、第1の無線モジュールM1に送信される(シーケンスQ22)。
整流電圧検出回路24は、整流電圧Vaを分圧抵抗R3,R4で分圧した検出電圧V3を生成する(シーケンスQ21)。この検出電圧V3は、第2の無線モジュールM2の信号情報処理回路27(マイコン)によって計測されて検出信号Svが生成される。整流電圧Vaに係る整流電圧情報である検出信号Svは、フィードバック信号として、第1の無線モジュールM1に送信される(シーケンスQ22)。
この検出信号Svを、第1の無線モジュールM1が無線信号送受信回路16で受信すると、High(H)レベルの制御信号S2を初期電圧制御回路13に出力する(シーケンスQ23)。初期電圧設定解除回路15のトランジスタQ5のベースに、Highレベルの制御信号S2が印加されてトランジスタQ5がONし、制御回路11の端子FB1がLowレベルとなる。よって初期電圧制御回路13は、制御回路11に対する初期駆動制御信号Ssの出力を停止する。(シーケンスQ24)。
同時に第1の無線モジュールM1は、検出信号Svに基づく制御信号S1を生成し、この制御信号S1を制御回路11の端子FB2に出力(フィードバック)する(シーケンスQ25)。制御回路11は、制御信号S1とオペアンプ113の基準電圧Vref2との比較結果で決定したパルス幅(オンデューティ)の矩形波を出力して駆動回路12を制御する(シーケンスQ26)。フルブリッジ構成の駆動回路12は、給電コイルL1を受電側の共鳴周波数の矩形波で駆動し、電力を伝送する(シーケンスQ27)。この共鳴周波数は、例えば100kHzである。
同時に第1の無線モジュールM1は、検出信号Svに基づく制御信号S1を生成し、この制御信号S1を制御回路11の端子FB2に出力(フィードバック)する(シーケンスQ25)。制御回路11は、制御信号S1とオペアンプ113の基準電圧Vref2との比較結果で決定したパルス幅(オンデューティ)の矩形波を出力して駆動回路12を制御する(シーケンスQ26)。フルブリッジ構成の駆動回路12は、給電コイルL1を受電側の共鳴周波数の矩形波で駆動し、電力を伝送する(シーケンスQ27)。この共鳴周波数は、例えば100kHzである。
2次側電源部28は、受電コイルL2と共鳴コンデンサC1を含む共鳴回路21で共鳴電圧を生成し、この共鳴電圧をダイオードブリッジDBで整流した整流電圧Vaを生成する。この整流電圧Vaの電力は、第2の所定電圧Va2(例えば、12V)であり、レギュレータRe2と整流電圧検出回路24とDC/DCコンバータ23に供給される(シーケンスQ28)。以降、DC/DCコンバータ23は、制御信号S4によって起動可能な状態となる。
整流電圧検出回路24は、整流電圧Vaを分圧抵抗R3,R4で分圧した検出電圧V3を生成する(シーケンスQ29)。この検出電圧V3は、第2の無線モジュールM2の信号情報処理回路27(マイコン)によって計測されて検出信号Svが生成される。整流電圧Vaに係る整流電圧情報である検出信号Svは、フィードバック信号として、第1の無線モジュールM1に送信される(シーケンスQ30)。
以降は、シーケンスQ25〜Q30の処理が繰り返されて、整流電圧Vaは第2の所定電圧Va2(例えは、12V)に収束する。
以降は、シーケンスQ25〜Q30の処理が繰り返されて、整流電圧Vaは第2の所定電圧Va2(例えは、12V)に収束する。
図11は、上位装置3からのDC/DCコンバータ23の制御動作を示すシーケンス図である。
ワイヤレス電力伝送システムSの起動の際、上位装置3は、第1の無線モジュールM1にDC/DCコンバータ23の起動信号を送信する(シーケンスQ40)。
ワイヤレス電力伝送システムSの起動の際、上位装置3は、第1の無線モジュールM1にDC/DCコンバータ23の起動信号を送信する(シーケンスQ40)。
この第1の無線モジュールM1は、ワイヤレス受電装置2の第2の無線モジュールM2にDC/DCコンバータ23の起動信号を転送する(シーケンスQ41)。更に整流電圧検出回路24が、検出電圧V3を第2の無線モジュールM2に印加する(シーケンスQ42)。整流電圧Vaが第2の所定電圧Va2である12Vに達していることを、第2の無線モジュールM2が検出したならば(シーケンスQ43)、制御信号S4をDC/DCコンバータ23に出力し(シーケンスQ44)、DC/DCコンバータ23を起動させる(シーケンスQ45)。以降、DC/DCコンバータ23は、負荷29(図1参照)に所定の電圧(例えば、出力電圧Vout)の電力を供給する。
シーケンスQ45の後、DC/DCコンバータ23と負荷29の消費電力が変動しても、整流電圧Vaが第2の所定電圧Va2となるように検出信号Svが第2の無線モジュールM2と第1の無線モジュールM1を介してフィードバックされ、検出信号Svに基づく制御信号S1が制御回路11にフィードバックされる。これにより、給電コイルL1を駆動する駆動回路12から出力されるパルス信号のオンデューティが変化する。
ワイヤレス電力伝送システムSの停止の際、上位装置3は、第1の無線モジュールM1にDC/DCコンバータ23の停止信号を送信する(シーケンスQ50)。
この第1の無線モジュールM1は、ワイヤレス受電装置2の第2の無線モジュールM2にDC/DCコンバータ23の停止信号を転送する(シーケンスQ51)。第2の無線モジュールM2は、制御信号S4をDC/DCコンバータ23に出力して(シーケンスQ52)、このDC/DCコンバータ23を停止させる(シーケンスQ53)。
また、給電側の直流電圧Vdcをオフすることで、ワイヤレス給電装置1を一方的に停止してもよい。
この第1の無線モジュールM1は、ワイヤレス受電装置2の第2の無線モジュールM2にDC/DCコンバータ23の停止信号を転送する(シーケンスQ51)。第2の無線モジュールM2は、制御信号S4をDC/DCコンバータ23に出力して(シーケンスQ52)、このDC/DCコンバータ23を停止させる(シーケンスQ53)。
また、給電側の直流電圧Vdcをオフすることで、ワイヤレス給電装置1を一方的に停止してもよい。
図12は、エラー発生時の動作を示すシーケンス図であり、図7と図8に示したフローチャートによる動作の一例を示している。
第1の無線モジュールM1は、第2の無線モジュールM2と相互通信状態に設定して、通信路を確立しようとする(シーケンスQ60)。
その後、第1の無線モジュールM1は、通信路が確立しないタイムアウトを検知する(シーケンスQ61)と、第1の無線モジュールM1は、制御回路11の端子SDに制御信号S3を出力する(シーケンスQ62)。これにより制御回路11は動作を停止し(シーケンスQ63)、ワイヤレス給電装置1は、電力の伝送を停止する。これにより、ワイヤレス電力伝送システムSを停止させることができる。
なお、第1の無線モジュールM1と第2の無線モジュールM2との無線通信路が確立後、何らかの要因で無線通信路が遮断された場合、第1の無線モジュールM1は、上記と同様に、制御回路11の端子SDに制御信号S3を出力して、ワイヤレス電力伝送システムSを停止させることができる。
第1の無線モジュールM1は、第2の無線モジュールM2と相互通信状態に設定して、通信路を確立しようとする(シーケンスQ60)。
その後、第1の無線モジュールM1は、通信路が確立しないタイムアウトを検知する(シーケンスQ61)と、第1の無線モジュールM1は、制御回路11の端子SDに制御信号S3を出力する(シーケンスQ62)。これにより制御回路11は動作を停止し(シーケンスQ63)、ワイヤレス給電装置1は、電力の伝送を停止する。これにより、ワイヤレス電力伝送システムSを停止させることができる。
なお、第1の無線モジュールM1と第2の無線モジュールM2との無線通信路が確立後、何らかの要因で無線通信路が遮断された場合、第1の無線モジュールM1は、上記と同様に、制御回路11の端子SDに制御信号S3を出力して、ワイヤレス電力伝送システムSを停止させることができる。
更に、ワイヤレス受電装置2の整流電圧Vaが第2の所定電圧Va2を超える値あるいは第2の所定電圧Va2未満の値となる異常状態が所定時間継続した場合を考える。整流電圧検出回路24は、整流電圧Vaを分圧抵抗R3,R4で分圧した検出電圧V3を生成する。この検出電圧V3は、第2の無線モジュールM2の信号情報処理回路27(マイコン)に印加される(シーケンスQ70)。
第2の無線モジュールM2は、整流電圧Vaのエラーを検知し(シーケンスQ71)、エラー信号を第1の無線モジュールM1に送信する(シーケンスQ72)。第1の無線モジュールM1は、このエラー信号を受けて、制御回路11の端子SDに制御信号S3を出力する(シーケンスQ73)。これにより制御回路11は動作を停止し(シーケンスQ74)、ワイヤレス給電装置1は、電力の伝送を停止する。これにより、例えば、ワイヤレス給電装置1とワイヤレス受電装置2とが想定以上に離された際、ワイヤレス電力伝送システムSを停止させることができる。
第2の無線モジュールM2は、整流電圧Vaのエラーを検知し(シーケンスQ71)、エラー信号を第1の無線モジュールM1に送信する(シーケンスQ72)。第1の無線モジュールM1は、このエラー信号を受けて、制御回路11の端子SDに制御信号S3を出力する(シーケンスQ73)。これにより制御回路11は動作を停止し(シーケンスQ74)、ワイヤレス給電装置1は、電力の伝送を停止する。これにより、例えば、ワイヤレス給電装置1とワイヤレス受電装置2とが想定以上に離された際、ワイヤレス電力伝送システムSを停止させることができる。
以上のように、本発明のワイヤレス電力伝送システムSは、給電側に共鳴回路が不要であるため、従来の磁場共振型の方式のように給電側共鳴と受電側共鳴を一致させる必要は無く、また、給電コイルと受電コイルとの位置のずれや距離の変動に対して周波数を追従させる必要がないため、共鳴周波数の制御が不要となる。
(変形例)
本発明は、上記実施形態に限定されることなく、本発明の趣旨を逸脱しない範囲で、変更実施が可能であり、例えば、次の(a)〜(e)のようなものがある。
(a) ワイヤレス受電装置2にDC/DCコンバータ23は必須ではなく、負荷29が直接に接続されていてもよい。
(b) ワイヤレス給電装置1の上位装置3から制御する対象は、DC/DCコンバータ23に限られず、例えば負荷29を制御してもよい。
(c) ワイヤレス給電装置1とワイヤレス受電装置2との間の無線通信は、電波通信に限定されず、適切な無線通信路を確立できれば、例えば赤外線通信、可視光通信、超音波通信などの無線方式であってもよく、限定されない。
(d) フィードバック制御は、図6に示した比例制御(古典制御)に限定されず、PI制御やPID制御などの古典制御、または現代制御であってもよく、限定されない。
(e) ワイヤレス給電装置1の駆動回路12は、フルブリッジ構成に限定されず、ハーフブリッジ構成であってもよい。
本発明は、上記実施形態に限定されることなく、本発明の趣旨を逸脱しない範囲で、変更実施が可能であり、例えば、次の(a)〜(e)のようなものがある。
(a) ワイヤレス受電装置2にDC/DCコンバータ23は必須ではなく、負荷29が直接に接続されていてもよい。
(b) ワイヤレス給電装置1の上位装置3から制御する対象は、DC/DCコンバータ23に限られず、例えば負荷29を制御してもよい。
(c) ワイヤレス給電装置1とワイヤレス受電装置2との間の無線通信は、電波通信に限定されず、適切な無線通信路を確立できれば、例えば赤外線通信、可視光通信、超音波通信などの無線方式であってもよく、限定されない。
(d) フィードバック制御は、図6に示した比例制御(古典制御)に限定されず、PI制御やPID制御などの古典制御、または現代制御であってもよく、限定されない。
(e) ワイヤレス給電装置1の駆動回路12は、フルブリッジ構成に限定されず、ハーフブリッジ構成であってもよい。
S ワイヤレス電力伝送システム
1 ワイヤレス給電装置
11 制御回路
111 レギュレータ
112,113 オペアンプ
114 比較器
115 ロジック回路
116 発振器
12 駆動回路
13 初期電圧制御回路
14 初期電圧設定回路
15 初期電圧設定解除回路
M1 第1の無線モジュール
16 無線信号送受信回路
17 信号情報処理回路
18 直流電源
L1 給電コイル
Re1 レギュレータ
G1〜G4 ゲート信号
2 ワイヤレス受電装置
21 共鳴回路
L2 受電コイル
C1 共鳴コンデンサ
22 整流回路
DB ダイオードブリッジ
C2 整流コンデンサ
23 DC/DCコンバータ(直流変換回路;負荷の一例)
24 整流電圧検出回路
M2 第2の無線モジュール
26 無線信号送受信回路
27 信号情報処理回路
28 2次側電源部
29 負荷
Re2 レギュレータ
S1 制御信号(第1の制御信号)
S2 制御信号(第2の制御信号)
S3 制御信号(第3の制御信号)
S4 制御信号(第4の制御信号)
Va 整流電圧
Va1 第1の所定電圧
Va2 第2の所定電圧
Vout 出力電圧
V1,V2 駆動電圧
V3 検出電圧
Ss 初期駆動制御信号
St 三角波信号
SsC 出力信号
S1C 出力信号
S1Ca 出力信号
S1Cb 出力信号
Sv 検出信号(整流電圧情報)
T トランス
1 ワイヤレス給電装置
11 制御回路
111 レギュレータ
112,113 オペアンプ
114 比較器
115 ロジック回路
116 発振器
12 駆動回路
13 初期電圧制御回路
14 初期電圧設定回路
15 初期電圧設定解除回路
M1 第1の無線モジュール
16 無線信号送受信回路
17 信号情報処理回路
18 直流電源
L1 給電コイル
Re1 レギュレータ
G1〜G4 ゲート信号
2 ワイヤレス受電装置
21 共鳴回路
L2 受電コイル
C1 共鳴コンデンサ
22 整流回路
DB ダイオードブリッジ
C2 整流コンデンサ
23 DC/DCコンバータ(直流変換回路;負荷の一例)
24 整流電圧検出回路
M2 第2の無線モジュール
26 無線信号送受信回路
27 信号情報処理回路
28 2次側電源部
29 負荷
Re2 レギュレータ
S1 制御信号(第1の制御信号)
S2 制御信号(第2の制御信号)
S3 制御信号(第3の制御信号)
S4 制御信号(第4の制御信号)
Va 整流電圧
Va1 第1の所定電圧
Va2 第2の所定電圧
Vout 出力電圧
V1,V2 駆動電圧
V3 検出電圧
Ss 初期駆動制御信号
St 三角波信号
SsC 出力信号
S1C 出力信号
S1Ca 出力信号
S1Cb 出力信号
Sv 検出信号(整流電圧情報)
T トランス
Claims (7)
- 受電装置にワイヤレスで電力を送信する給電コイルと、
前記給電コイルにパルス電力を出力する駆動回路と、
前記受電装置に生じた整流電圧に係る整流電圧情報を、無線通信路を介して受信する第1の無線モジュールと、
前記第1の無線モジュールが受信した前記整流電圧情報に基づき、駆動制御信号を生成して前記駆動回路を制御する制御回路と、
を備え、
前記制御回路は、前記駆動回路の駆動周波数を前記受電装置の共鳴回路のシリーズ共振周波数とパラレル共振周波数との間の固定周波数で制御することを特徴とするワイヤレス給電装置。 - 前記駆動回路は、ブリッジ回路であって、前記給電コイルに前記パルス電力を印加してパルス駆動し、
前記制御回路は、前記整流電圧情報に基づき、前記パルス電力のオンデューティを可変制御する、
ことを特徴とする請求項1に記載のワイヤレス給電装置。 - 前記駆動回路は、フルブリッジ回路であって、前記駆動回路のハイサイドスイッチング素子同士およびローサイドスイッチング素子同士のゲート信号のパルス幅は等しい、
ことを特徴とする請求項2に記載のワイヤレス給電装置。 - 給電装置からワイヤレスで電力を受信する受電コイルと、共鳴コンデンサと、を含み、共鳴電圧を生成する共鳴回路と、
前記共鳴電圧を整流して整流電圧を出力する整流回路と、
前記整流電圧をもとに整流電圧情報を生成して前記給電装置が備える第1の無線モジュールに送信する第2の無線モジュールと、
を備え、
前記給電装置により、前記共鳴回路の共鳴周波数が該共鳴回路のシリーズ共振周波数とパラレル共振周波数との間の周波数になるように設定される、
ことを特徴とするワイヤレス受電装置。 - 前記共鳴回路は、前記受電コイルと前記共鳴コンデンサとが並列接続されて構成され、
前記給電装置の給電コイルと前記受電コイルとで構成されるトランスの2次側のリーケージインダクタンス、前記受電コイルの自己インダクタンス、前記共鳴コンデンサの容量に対して、前記シリーズ共振周波数は、前記リーケージインダクタンスと前記共鳴コンデンサの容量とで決定され、前記パラレル共振周波数は、前記受電コイルの自己インダクタンスと前記共鳴コンデンサの容量とで決定される、
ことを特徴とする請求項4に記載のワイヤレス受電装置。 - 前記第2の無線モジュールが動作可能な第1の所定電圧よりも高い第2の所定電圧が印加されて動作する負荷を備え、
前記負荷は、前記第2の無線モジュールが出力する制御信号により、起動または停止する、
ことを特徴とする請求項4または5に記載のワイヤレス受電装置。 - 請求項1ないし請求項3のうちいずれか1項に記載のワイヤレス給電装置と、
請求項4ないし請求項6のうちいずれか1項に記載のワイヤレス受電装置と、
を備えることを特徴とするワイヤレス電力伝送システム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016092981A JP2017201854A (ja) | 2016-05-06 | 2016-05-06 | ワイヤレス給電装置、ワイヤレス受電装置およびワイヤレス電力伝送システム |
| US15/484,784 US20170324280A1 (en) | 2016-05-06 | 2017-04-11 | Wireless power supply device, wireless power receiving device and wireless power transmission system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016092981A JP2017201854A (ja) | 2016-05-06 | 2016-05-06 | ワイヤレス給電装置、ワイヤレス受電装置およびワイヤレス電力伝送システム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017201854A true JP2017201854A (ja) | 2017-11-09 |
Family
ID=60244156
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016092981A Pending JP2017201854A (ja) | 2016-05-06 | 2016-05-06 | ワイヤレス給電装置、ワイヤレス受電装置およびワイヤレス電力伝送システム |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US20170324280A1 (ja) |
| JP (1) | JP2017201854A (ja) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019187053A (ja) * | 2018-04-06 | 2019-10-24 | 電気興業株式会社 | 無線電力伝送システム |
| KR20190133979A (ko) * | 2018-05-24 | 2019-12-04 | 엘지전자 주식회사 | 무선 전력 송신 장치 및 무선 전력 수신 장치 |
| CN110768390A (zh) * | 2019-12-09 | 2020-02-07 | 无锡光益能能源科技有限公司 | 一种用于串联谐振无线充电的稳压系统 |
| KR20220043707A (ko) * | 2020-09-29 | 2022-04-05 | 삼성전자주식회사 | 무선 충전 시스템을 위한 새로운 pwm 방식 |
| KR20220055191A (ko) * | 2020-10-26 | 2022-05-03 | 삼성전자주식회사 | 무선 충전 시스템의 동작 모드 전환 방법 |
| WO2024075628A1 (ja) * | 2022-10-06 | 2024-04-11 | ミネベアミツミ株式会社 | 電力伝送システム |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11101915B2 (en) * | 2016-04-25 | 2021-08-24 | University Of Maryland, College Park | System and method for wireless power transfer using time reversed electromagnetic wave propagation |
| JP7510767B2 (ja) * | 2020-02-19 | 2024-07-04 | キヤノンメディカルシステムズ株式会社 | X線検出器及び医用画像診断装置 |
| JP7700505B2 (ja) * | 2021-05-12 | 2025-07-01 | オムロン株式会社 | 複合共振回路の駆動制御装置及び非接触給電システム |
| CN114069887A (zh) * | 2021-11-29 | 2022-02-18 | 深圳华声医疗技术股份有限公司 | 插接式监护仪 |
| CN117616663A (zh) * | 2022-06-20 | 2024-02-27 | 北京小米移动软件有限公司 | 无线接收电路及其配置方法、电子设备、可读存储介质 |
| CN116032328B (zh) * | 2022-12-19 | 2024-06-18 | 陕西亿星远能科技有限公司 | 无电池无线通信系统及方法 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1014139A (ja) * | 1996-06-17 | 1998-01-16 | Nec Corp | 電力伝送装置 |
| WO2014021085A1 (ja) * | 2012-07-30 | 2014-02-06 | 日産自動車株式会社 | 非接触給電装置 |
| WO2015104779A1 (ja) * | 2014-01-07 | 2015-07-16 | パナソニックIpマネジメント株式会社 | 非接触給電装置及び非接触給電装置の始動方法 |
| JP2015173587A (ja) * | 2014-02-18 | 2015-10-01 | パナソニック株式会社 | 無線電力伝送システムおよび送電装置 |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN106165244A (zh) * | 2014-05-30 | 2016-11-23 | 株式会社Ihi | 非接触供电系统、受电装置及送电装置 |
| RU2565664C1 (ru) * | 2014-07-15 | 2015-10-20 | Самсунг Электроникс Ко., Лтд. | Способ управления в системах беспроводной передачи мощности |
-
2016
- 2016-05-06 JP JP2016092981A patent/JP2017201854A/ja active Pending
-
2017
- 2017-04-11 US US15/484,784 patent/US20170324280A1/en not_active Abandoned
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1014139A (ja) * | 1996-06-17 | 1998-01-16 | Nec Corp | 電力伝送装置 |
| WO2014021085A1 (ja) * | 2012-07-30 | 2014-02-06 | 日産自動車株式会社 | 非接触給電装置 |
| WO2015104779A1 (ja) * | 2014-01-07 | 2015-07-16 | パナソニックIpマネジメント株式会社 | 非接触給電装置及び非接触給電装置の始動方法 |
| JP2015173587A (ja) * | 2014-02-18 | 2015-10-01 | パナソニック株式会社 | 無線電力伝送システムおよび送電装置 |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019187053A (ja) * | 2018-04-06 | 2019-10-24 | 電気興業株式会社 | 無線電力伝送システム |
| KR20190133979A (ko) * | 2018-05-24 | 2019-12-04 | 엘지전자 주식회사 | 무선 전력 송신 장치 및 무선 전력 수신 장치 |
| KR102091215B1 (ko) * | 2018-05-24 | 2020-03-19 | 엘지전자 주식회사 | 무선 전력 송신 장치 및 무선 전력 수신 장치 |
| CN110768390A (zh) * | 2019-12-09 | 2020-02-07 | 无锡光益能能源科技有限公司 | 一种用于串联谐振无线充电的稳压系统 |
| KR20220043707A (ko) * | 2020-09-29 | 2022-04-05 | 삼성전자주식회사 | 무선 충전 시스템을 위한 새로운 pwm 방식 |
| KR102863897B1 (ko) | 2020-09-29 | 2025-09-25 | 삼성전자 주식회사 | 무선 충전 시스템을 위한 새로운 pwm 방식 |
| KR20220055191A (ko) * | 2020-10-26 | 2022-05-03 | 삼성전자주식회사 | 무선 충전 시스템의 동작 모드 전환 방법 |
| WO2022092692A1 (ko) * | 2020-10-26 | 2022-05-05 | 삼성전자 주식회사 | 무선 충전 시스템의 동작 모드 전환 방법 |
| KR102874042B1 (ko) | 2020-10-26 | 2025-10-21 | 삼성전자 주식회사 | 무선 충전 시스템의 동작 모드 전환 방법 |
| WO2024075628A1 (ja) * | 2022-10-06 | 2024-04-11 | ミネベアミツミ株式会社 | 電力伝送システム |
Also Published As
| Publication number | Publication date |
|---|---|
| US20170324280A1 (en) | 2017-11-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2017201854A (ja) | ワイヤレス給電装置、ワイヤレス受電装置およびワイヤレス電力伝送システム | |
| JP2017184411A (ja) | ワイヤレス給電装置、ワイヤレス受電装置およびワイヤレス電力伝送システム | |
| JP4941417B2 (ja) | 非接触電力伝送装置 | |
| US10027130B2 (en) | Apparatus for transmitting power wirelessly | |
| US10141980B2 (en) | Wireless power transmission system, and communication and protection methods for the same | |
| US9893627B1 (en) | Current controlled resonant tank circuit | |
| JP5997456B2 (ja) | 無線給電装置 | |
| US10020686B2 (en) | Power transmission system | |
| CN106560978B (zh) | 无线电力传输系统 | |
| CN105393432A (zh) | 无线电力传输系统以及送电装置 | |
| US9754740B2 (en) | Switching control circuit and switching power-supply device | |
| KR20170109929A (ko) | 무선 전력 제어 장치 및 그를 이용한 무선 전력 송신 장치 | |
| US20190006843A1 (en) | Power transmission device and power reception device | |
| US10483860B1 (en) | Primary side constant current regulation | |
| WO2016147562A1 (ja) | 非接触給電装置及び非接触受電装置 | |
| CN111052580A (zh) | 开关电源装置 | |
| JP6569861B2 (ja) | 無線電力伝送システム | |
| JP6663764B2 (ja) | ワイヤレス受電制御回路、ワイヤレス受電装置の制御方法、電子機器 | |
| JP2018196290A (ja) | ワイヤレス電力伝送システム、およびワイヤレス電力伝送システムの通信方法 | |
| JP2018196260A (ja) | 電源装置及び画像形成装置 | |
| JP2001275345A (ja) | 電源装置 | |
| JP6269375B2 (ja) | 非接触給電装置および非接触給電システム | |
| US9310818B2 (en) | Voltage converter and regulating circuit control chip | |
| JP2015186405A (ja) | 絶縁型直流電源装置 | |
| JP2023088134A (ja) | 非接触給電装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20171206 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180914 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20181002 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20190416 |